管道内钢珠运动测量装置的设计与实现
钢球振动测量仪电气系统的设计
钢球振动测量仪电气系统的设计引言随着微电子技术的发展,出现了许多功能强大的集成电路芯片,这些芯片往往可以将一个完整功能的电路集成到一个芯片上,或将几个相关功能的电路甚至整套的测控电路集成到一个芯片上。
在现代仪器的开发设计中,应尽可能地采用集成化器件。
钢球振动测量仪的电气系统设计,充分采用了高集成度的芯片去简化电路或电路设计,利用了集成状态变量滤波器;集成化真有效值、对数转换器;集成函数发生器等,提高了仪器电气系统的性能,降低了成本。
1工作原理被测钢球通过不同胎具固定在高精度主轴上旋转,加速度传感器与被测钢球表面接触,并拾取钢球表面因波纹而产生的微弱振动信号。
此信号经电荷放大器放大后,通过170~400Hz或400~800Hz带通滤波器,再送至有效值、对数电路,最后经表头指示出被测钢球的波纹振动值,其振动值的大小用分贝值度量。
该仪器设有自校电路,其电路产生260Hz 与520Hz正弦波信号,用于随时校准。
电气系统的测量原理如图1所示。
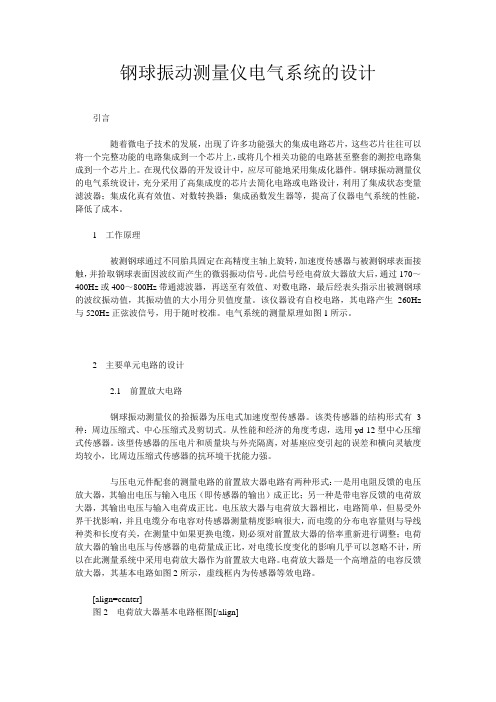
2主要单元电路的设计2.1前置放大电路钢球振动测量仪的拾振器为压电式加速度型传感器。
该类传感器的结构形式有3种:周边压缩式、中心压缩式及剪切式。
从性能和经济的角度考虑,选用yd-12型中心压缩式传感器。
该型传感器的压电片和质量块与外壳隔离,对基座应变引起的误差和横向灵敏度均较小,比周边压缩式传感器的抗环境干扰能力强。
与压电元件配套的测量电路的前置放大器电路有两种形式:一是用电阻反馈的电压放大器,其输出电压与输入电压(即传感器的输出)成正比;另一种是带电容反馈的电荷放大器,其输出电压与输入电荷成正比。
电压放大器与电荷放大器相比,电路简单,但易受外界干扰影响,并且电缆分布电容对传感器测量精度影响很大,而电缆的分布电容量则与导线种类和长度有关,在测量中如果更换电缆,则必须对前置放大器的倍率重新进行调整;电荷放大器的输出电压与传感器的电荷量成正比,对电缆长度变化的影响几乎可以忽略不计,所以在此测量系统中采用电荷放大器作为前置放大电路。
管道钢珠
2017 年 TI 杯大学生电子设计竞赛管道内钢珠运动测量装置摘要我们的管道内钢珠运动测量装置主要采用 TL-W5MC1 金属感应接近开关,AT89C51 单片机, Adxl335 三轴角度传感器来反应钢珠在管道内的运动情况。
本实验中仅使用普通的元器件就可以较好的测量与反应数值。
显示部分 LCD12864 液晶显 示屏幕钢珠通过数,钢珠运动方向,管道角度都能较好直观呈现。
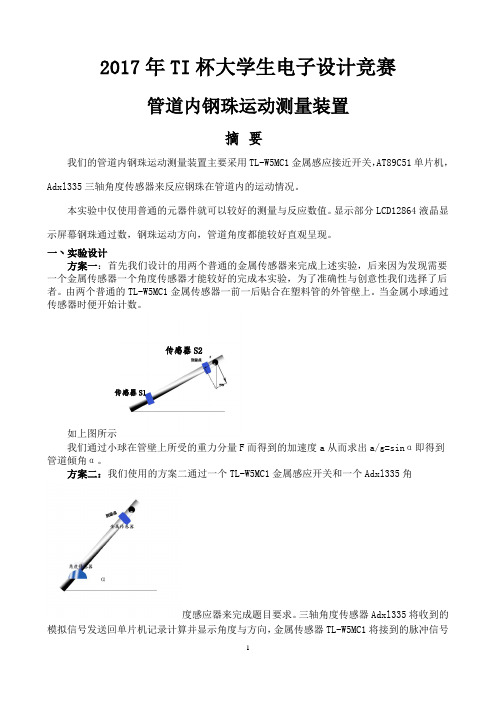
一丶实验设计方案一:首先我们设计的用两个普通的金属传感器来完成上述实验,后来因为发现需要 一个金属传感器一个角度传感器才能较好的完成本实验,为了准确性与创意性我们选择了后 者。
由两个普通的 TL-W5MC1 金属传感器一前一后贴合在塑料管的外管壁上。
当金属小球通过 传感器时便开始计数。
传感器 S2传感器 S1如上图所示 我们通过小球在管壁上所受的重力分量 F 而得到的加速度 a 从而求出 a/g=sinα 即得到 管道倾角α 。
方案二:我们使用的方案二通过一个 TL-W5MC1 金属感应开关和一个 Adxl335 角α度感应器来完成题目要求。
三轴角度传感器 Adxl335 将收到的 模拟信号发送回单片机记录计算并显示角度与方向,金属传感器 TL-W5MC1 将接到的脉冲信号1发送回单片机完成计数。
二丶理论分析与论证方案一论证:以上便是我们本实验的程序框图初始化后经过小球经过传感器 s1,s2 后显 示方向 10 并且计数(反之经过s2,s1显示方向01)。
然后通过套用公式加速度公式然后我们将上面的公式联列起来即得由上面公式我们发现只要测得两点之间距离与两点之间时间就可以求出小球下落的加速 度a。
加速度a得到之后管道倾角α 的正弦值就等于加速度a与重力加速度的比值。
得到小球个数,倾斜角度,运动方向后将数据上传在12864液晶显示屏上直观的呈 现出来。
方案二论证:我们使用的方案二通过一个 TL-W5MC1 金属感应开关和一个 Adxl335 角度感 应器来完成题目要求。
一种利用检测钢球通过管道来判断管道角度的装置设计

一种利用检测钢球通过管道来判断管道角度的装置设计张通张萌谷栎娜(石家庄工程职业学院河北省石家庄市050061 )摘要:本文设计一种利用检测钢球通过管道来判断管道角度的装置。
利用检测钢球通过管道来判断管道角度的装置,主控部分为 STC89C52单片机并配以12864B液晶显示模块,利用两个金属感应接近开关非接触式实时监测钢球在管道内的运动状态。
传感器的信号接 入单片机的外部中断端口,利用单片机内部定时器进行计时,综合利用力学运动公式推理计算,实现对钢球的运动方向,投入钢球的个数、钢球在管道内摆周期及管道倾斜角度的测量。
整个装置硬件电路结构简洁、调试方便,可以实现在特殊的领域进行管道的角度测量,即使 在两个传感器间距小于20mm的情况下也能实现了准确测量。
关键词:管道角度测量;STC89C52单片机;金属感应接近开关;12864B液晶显示模块1硬件设计方案整套系统包括主控控制芯片、非接触是传感器和显示模块。
1. 1显示部分的论证与选择显示部分是整套系统的展现给使用者的人机交互界面,需要清晰的展示显示的内容,也需要考虑采购价格。
综合考虑我们采用12864 LED液晶显示,这一款显示屏自带中文字库,同时能显示字符和数字,编程简单。
1.2非接触式传感器的认证与选择因为不适用角度传感器,我们采用电感式接近开关。
将电感式接近开关安装到管道上,可以通过算法实现管道角度的测量。
电感式接近开关具有精度高、体积小、安装方便的特点,特别适合测量钢铁等金属物体。
1. 3主控芯片的选取整套系统采用的是51内核的国产单片机STC89C52R C单片机,该单片机简单实用相关技术资料文档齐全,开发快捷并且高效。
芯片有8K字节的数据储存空间,并且可以通过串口进行下载代码,方便开发者调试和更新程序。
本系统设计代码部分并不复杂所以采取该型号单片机。
2理论分析与计算本装置设计要求计量钢球的投放个数、显示钢球运动方向、统计管道的摆动周期三个内容通过单片机对传感器的检测信号的分析即可完成,下面主要分析从管道一端投入•枚钢球,要求显示管道的倾斜角度。
管道内钢珠运动测量装置
管道内钢珠运动测量装置摘要:本次设计为2017年全国大学生电子设计竞赛题目《管道内钢珠运动测量装置》,该装置主要由控制模块、显示模块、语音模块、电源模块组成。
以高性能的电感式接近传感器进行测量,单片机对传感器传回的电信号处理后发送给液晶显示屏。
经过测试该装置能够精确显示放入钢珠的个数、钢珠的运动方向及管道倾斜的角度值等基本要求。
在限制两传感器之间的距离后,该装置还能实现显示管道摆动的周期个数、连续倒入钢珠的个数和倾斜角的角度值等发挥部分的题目。
关键词:单片机;接近传感器;管道内钢珠;测量装置1系统方案本次设计了一种管道内钢珠运动测量装置,该装置主要由控制模块、显示模块、语音模块、电源模块组成。
下面分别论证这几个模块的选择。
1.3 系统总体框图系统总体框图如下图1所示。
本系统包括由主控芯片、传感器、显示模块、语音模块组成,由按键控制单片机的运行模式,接近开关检测钢珠并传给单片机,芯片处理后发送数据给显示和语音模块。
由上表6数据可知,符合发挥部分(三)的要求。
5.总结综上所述,本设计根据上述测试数据,由此可以得出以下结论:总体上看,所有测量结论均与基本要求和发挥部分要求相符合,实验较为成功。
还实现了语音播报的特色功能。
综上所述,本设计达到设计要求。
参考文献:[1]胡仁杰,堵国樑.全国大学生电子设计竞赛优秀作品设计报告选编[M].南京:东南大学出版社,2014.[2]谭浩强.C语言程序设计[M].2版,北京:清华大学出版社,2008.[3]堵国樑,吴建辉,樊兆雯等.模拟电子电路基础[M].北京:机械工业出版社,2014.。
使用接近开关测量管道内钢珠个数的装置设计
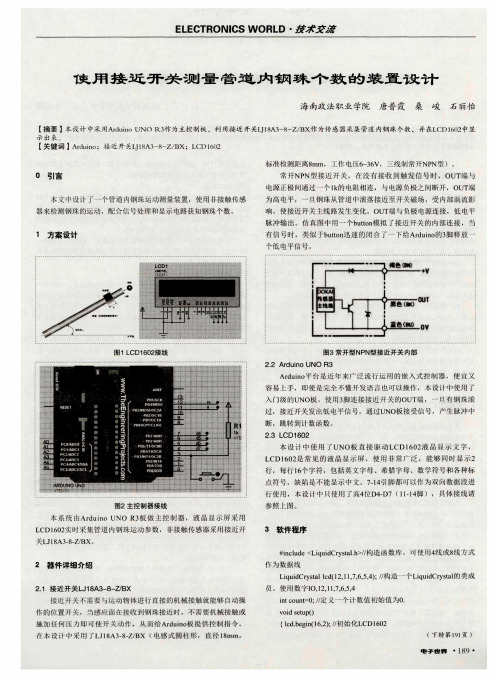
常开 NP N型接 近 开 关 , 住没 有 接 收 到 触 发信 号 时 ,OU T 端与
电源 正极 问通 过 一 个l k 的 电阻 相连 ,与 电源 负极 之 断 开 ,Ou T 端 为高 电平 , 一旦钢 珠从 管道 中滚落 接近 至 开关磁 场 ,受 内 部涡流 影 响 ,使接 近开 关主 线路 发生 变 化,OU T 端 与 负极 电源连 接 ,低 电平 脉冲 输 出 。仿 真 图中 用一 个b u t t o n 模 拟 了接 近 开关 的 内 部连接 , 当
{ l c d . b e g i n ( 1 6 , 2 ) ; / / 初始化 L CD1 6 0 2
(下转 第 1 9 1 页 )
电子世界 ・1 8 9・
E L E C T R ON s W ORL D・ 技术 交流
3 ) 辅 助 资源 方 面 。发动 机 孔探 不是 一 个独 立 的维修 工 作 , 需要
其 他工 种的 支 持 ,而对 于普 通 的航 线维 修人 员 ,参加 发动 机 孔探 辅 助 工作 的概 率 是很低 的 ,容 易 导致 因其 技能 和经 验不 足 ,对孔 探 工 作 的质 量 和 效率 造 成干 扰 。 资源 不 足所 占权 重 :单 一 内容 是2 ;工
作时 间不 确 定是5 :工 作压 力大 是3 经 验 和主观 性是 3 ;总和 是 1 3 。
1 方案设计
有信 号时 ,类 似于 b u t t o n 迅速 的闭 合 了一 卜 给A r d u i n o 的3 脚 释放 。
个低 电平信 号 。
一
图1 L CD1 6 0 2 接 线
基于AVR128的管道内钢珠运动测量装置设计
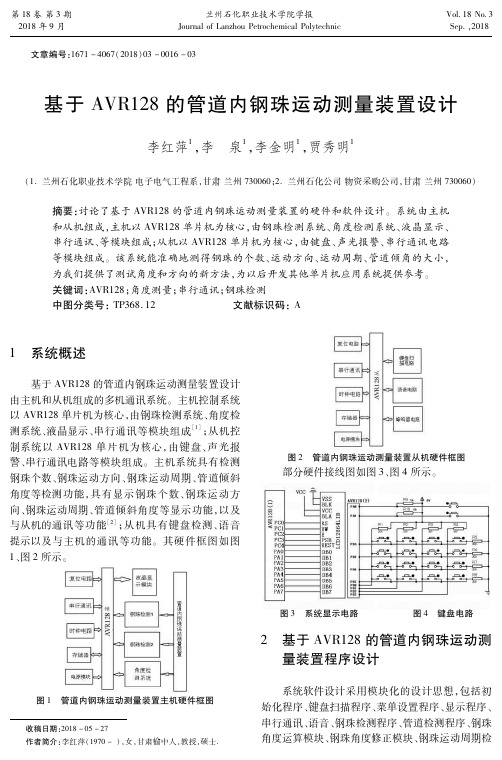
图 2 管道内钢珠运动测量装置从机硬件框图
部分硬件接线图如图 3、图 4所示。
图 1 管道内钢珠运动测量装置主机硬件框图
收稿日期:2018-05-27 作者简介:李红萍(1970- ),女,甘肃榆中人,教授,硕士.
图 3 系统显示电路 图 4 键盘电路
2 基于 AVR128的管道内钢珠运动测 量装置程序设计
检测与数 据 融 合 [J].河 南 科 技 大 学 学 报 (自 然 科 学 版),2015(04):14-17.
DesignofSteelBallMotionMeasuringDeviceBasedonAVR128 LIHong-ping1,LIQuan2,LIJin-ming1,JIAXiu-ming2
测、钢珠运动方向模块等模块组成[3]。 2.1 系统软件模块设计
系统软件模块设计如图 5所示。
图 5 管道内钢珠运动测量装置系统软件框图
2.2 典型程序设计 1)主程序流程图如图 6所示。
3 程序功能
管道内钢珠运动测量装置通过金属传感器实现 对钢珠的个数、运动方向、运动周期的精确测量,通 过角度传感器实现对管道倾角的精确控制,并实时 地显示钢珠的个数、运动方向、运动周期、管道倾角 的大小,并 用 菜 单 的 形 式 实 现 不 同 的 功 能[4],具 体 如下:
· 1 8· 兰 州 ,李 首 滨.基 于 液 压 支 架 倾 角 的 采 煤 高 度 测 量 方法[J].煤炭学报,2016(03):788-793.
[7] 刘春阳,徐 军 领,程 洪 涛,等.MPU9250传 感 器 的 姿 态
[3] 王 直,施 晓 敏,丁 建 军,等.增 量 式 光 电 编 码 器 信 号 处理电路的设计与实现[J].电子设计工程,2012(02) :121-123.
基于stc12c5a60s2单片机管道内钢珠运动测量系统的设计
S2
t2 t
a
PVC管
a
传感器2
S1
t1
钢珠 β
传感器1
g
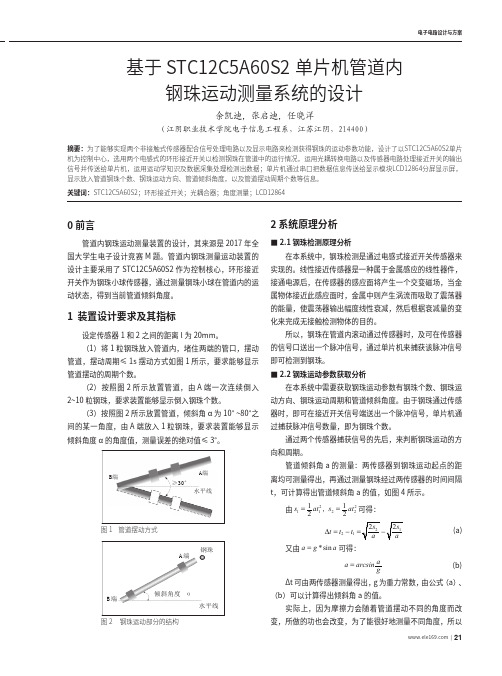
图 3 倾斜角 a 测量示意图
综上所述不难发现钢珠经过两个传感器的间隔时间 t 与 管道的倾斜角度有着复杂的非线关系,加上外界不可避免的 误差,会使整个系统误差加大,而且增加了单片机的负荷。 但是在此同时我们又发现随着倾斜角度 α 的增加,通过传 感器的时间也越来越短。多次检测特殊角度所对应的时间, 然后通过算法进一步减少误差。
环形接近开关 HX-DGS-20N 具有高分辨率特点:即使 直径为 0.6mm 的小钢珠都能被可靠的检测,特别快速的反 应时间 0.2ms,满足本次设计需求。
综合比较,方案二比较合适。 ■■4.2 环形开关驱动电路
系统选用 HX-DGS-20N 的环形接近开关 NPN 型号,其 负载电流在 3mA~100mA 之间,其工作电压在直流 10~36V 之间。系统选用 12V 电源,1K 电阻作为负载。经测试,当 有金属球经过时输出信号脚 SingnalOut 有高低电平的变化, 高电平为 +12V,并非标准的 TTL 信号。为将该信号转换为 TTL,还需要外接电平转换电路。 ■■4.3 电平转换电路
设定传感器 1 和 2 之间的距离 l 为 20mm。 (1)将 1 粒钢珠放入管道内,堵住两端的管口,摆动 管道,摆动周期≤ 1s 摆动方式如图 1 所示,要求能够显示 管道摆动的周期个数。 (2)按照图 2 所示放置管道,由 A 端一次连续倒入 2~10 粒钢珠,要求装置能够显示倒入钢珠个数。 (3)按照图 2 所示放置管道,倾斜角 α 为 10° ~80°之 间的某一角度,由 A 端放入 1 粒钢珠,要求装置能够显示 倾斜角度 α 的角度值,测量误差的绝对值≤ 3°。
基于STC12C5A60S2单片机钢珠运动测量装置设计

1 系统方案设计1.1 系统总体方案设计本系统采用长度为50cm 的PV 材质管道[1],将两个接近开关安装在管壁外,可以在不接触钢球和不破坏管道的情况下检测到管道内高速通过的小球。
系统的总体结构框图如图1所示,主要由主控模块、电机驱动模块、角度检测模块、小球运动检测模块、液晶显示模块、电源模块等组成[2]。
图1 总体结构框图1.2 主控模块选择STC89C52是传统的8051单片机,具有价格便宜、技术成熟的优点,但运行速度慢、内部资源少、功耗高。
STC-12C5A60S2是新一代8051单片机,单时钟/机器周期为1T,指令代码与传统8051完全兼容,但速度快10倍左右。
该型号单片机具有速度快、可靠性高、功耗低、超强抗干扰的特点。
综合考虑选择STC12C5A60S2型号的单片机,完全满足系统设计需求。
1.3 电机驱动模块步进电机驱动器2M415型使用直流18-36V 供电,电流小于3A 外径35-42 mm 的两相混合式步进电机。
此驱动器采用DSP 交流伺服驱动器的电流环进行细分控制,具有性能高、价格低、噪音低、平稳性好的优点,因此电机驱动模块采用2M415细分型步进电机驱动器。
1.4 角度检测模块角度传感器是一种常用的电子元件,它使用角度变化来定位物体的位置。
角度传感器在其主体上有一个孔,可以连接到马达和轮子之间的任何一根传动轴上。
角度传感器每隔1/16圈计数一次,计数随着一个方向的旋转而增加,随着另一个方向的旋转而减小。
计数与角度传感器的初始位置有关,初始化角度传感器时可以通过编程方式重置计数值为0。
1.5 液晶显示模块常用的液晶显示模块主要有LCD1602和12864两种。
motion and sends the signal to the MCU to trigger the interrupt. The Angle sensor measures the pipe Angle and establishes the database related to the ball movement and Angle. By comparing the relevant data of the ball movement with the database, the exact Angle is obtained by using the parallel algorithm and algorithm correction. The device can measure the number of steel balls, the direction of movement, the velocity of movement, the period of pipe swing and the Angle of inclination. Key words : STC12C5A60S2 single-chip microcomputer; proximity switch; database基金项目:贵州省科技厅联合基金项目(黔科合LH 字[2016]7069号);贵州工业职业技术学院科研基金项目(2018SK02)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
∗浙江省课堂教学改革项目(kg20160507);国家级大学生创新项目(201811481018);浙江水利水电学院2018大学生年创新项目(基于CDIO 理念的电子线路创新模块开发)浙江省公益技术应用研究项目(2017C33155);浙江省水利厅项目(RC1848,RC1855,RC1858)1装置方案1.1总体方案设计如图1所示,钢珠滚动入直径为20mm 的PV 管道,在管道上安装两个宽度小于20mm 的电感线圈作为传感器,当钢珠滚动经过管道,通过涡流传感器产生一个波形,通过比较器后整形成为脉冲波,送到单片机进行运算处理,单片机包含了4∗4键盘、液晶显示,可以方便地按照题目要求进行设置和显示[1]。
图1总体框图1.2单片机的选择一种选择是32位的ARM2132单片机,该单片机功能强大,相对价格也比较昂贵。
本次控制对时间精度的要求不是很高,采用该单片机许多资源都是用不上,所以不需要用32位的ARM 单片机。
STC12C5A32S2单片机是宏晶科技生产的单时钟/机器周期穴1T雪的单片机,是高速/低功耗/超强抗干扰的新一代8051单片机,指令代码完全兼容传统8051,但速度快8~12倍,内部集成MAX810专用复位电路,具有SPI 接口,编程和下载方便,所以采用该单片机。
1.3比较器的选择涡流传感器检测到钢珠滚动经过的信号是一个不规则的波形,单片机无法识别,因此需要整形成脉冲波形送给单片机。
比较器可以通过运放构成单限比较器,运放市场上很多。
第一次是选择了运放LM358作为比较器,但是LM358输出只有3.8V 左右,最多也达到4V 左右,输出不是5V 的标准信号,给单片机检测带来不稳定因素;第二次是选择了专用的比较器运放LM339,该运放的输出是OC 门输出,接上拉电阻可以达到所需要的各种高电平,实现5V 输出,与单片机容易匹配。
因此最后选择了LM339运放作为比较器。
2理论分析与计算2.1测量方法的选择与工作原理分析测量方法1:选择市场上现有的涡流式原理的接近开关,在市场上购买到的TK-12P4C 是PNP 的接近开关,感应距离大概是0.4cm ,单个钢珠能输出较好的脉冲信号,多个钢珠一起滚动的时候捕捉脉冲信号就不准确。
而且安装很不方便,能够接触到钢珠的面积小,灵敏度不够高,因此放弃。
测量方法2:采用自制的涡流传感器及相关电路,工作原理如图2所示:图2涡流传感器工作原理图由于该方法检测灵敏,可以把电感线圈套在管道上作为传感器,电涡流的变化能够捕捉到小球连续滚过的信号,所以采用该方案来实现。
该电路主要是由LC 振荡电路,高频放大器,检波电路,及低频放大器组成,使输出在钢珠滚入和滚出产生一个输出波形经过整形送给单片机检测[2]。
从从能量角度来看,在被测电感导体内存在着电涡流的损耗和磁损耗,但在高频时电涡流损耗值远大于磁损耗值。
电涡流传感器所载高频电流一般为50kHz 以上,因此只须考虑电损耗即可。
能量的损耗,使传感器的Q 值和等效阻抗Z 减低,因此当被测体与传感器间的距离d 改变时,使传感器的Q 值和等效阻管道内钢珠运动测量装置的设计与实现∗杨启尧刘煜博许鑫焱吴众胡曹娟郭栋潘鑫鑫(浙江水利水电学院电气工程学院,浙江杭州310018)摘要:设计通过自制涡流传感器作为管道内钢珠的检测元件,用漆包线绕制20mm 左右的电感套在管道上,电感通过导线连接到涡流传感器电路,该电路由LC 振荡、高频放大、检波电路及低频放大器构成,能够灵敏捕捉到钢珠的滚动,以及多个钢珠一次性倒入的信号,该信号通过专用比较器LM339整形输出脉冲波送到单片机。
通过单片机控制分别在两个传感器间距较大时完成了钢珠的累计,运动方向的控制以及角度的显示。
关键词:涡流传感器,钢珠,单片机,运动测量Abstract 押A self-made eddy current sensor is designed to detect steel balls in pipes.The inductance is wrapped around a 20mm enameled wire on the pipe.The inductance is connected to the eddy current sensor circuit through the wire.The circuit consists of LC oscillation熏high frequency amplification熏detection circuit and low frequency amplifier熏which can sensitively capture the rolling of steel balls.The signal is sent to the single-chip computer through the special comparator LM339shap⁃ing output pulse wave.The accumulation of steel balls熏the control of movement direction and the display of angle are com⁃pleted by single chip microcomputer control when the distance between the two sensors is large.Keywords 押eddy current sensor熏steel ball熏single chip microcomputer熏motionmeasurement管道内钢珠运动测量装置的设计与实现142抗Z 、电感L 发生变化,这样就把位移量转化为电量,这是电涡流传感器的基本原理[2-3]。
自制一个电感线圈,套在4分管上,当钢珠滚过时,电涡流就发生变化,振荡后就使得输出的电压发生变化,可以得到一个脉冲。
电窝流传感器的具体公式见式(1)~式(3)。
∂H y ∂H x =J y ∂Jz ∂x =μ0μr ρ-∂H y ∂t H y (0,t )=H 0e j ωt H x |y=0=H y |x=0⎧⎩⏐⏐⏐⎨⏐⏐⏐(1)h=1b =2ρμ0μr ω√=ρμr f√(2)J z =∂H y∂x=-b (j+1)H 0e j (ωt-bx )(3)H-磁场强度,J-电流,μ0、μr -真空和被测体的导磁系数,h-贯穿深度,ρ-导体电阻率,J z -电涡流。
2.2检测电路的原理分析计算如图3所示,图中La1和La2是电感线圈并入的地方,利用9015和电感构成LC 振荡器,实现放大,当钢珠滚过电感线圈时,在高频磁场中产生电涡流,就会造成电涡流线圈端电压的衰减,再经过高频放大器,通过检波电路,最后通过一个三极管2N5551构成的低频放大器,可以检测出小球滚过时输出电压幅度的变化,最后通过另外一个比较器电路输出信号,达到稳定的输出脉冲信号,由单片机进行控制。
题目要求有两个传感器,所以有两个这样的电路。
图3涡流传感器电路图如图4所示为比较器原理图,涡流传感器的输出信号是不规则的波形,该信号经过LM339专用比较器整形输出得到一个比较好的脉冲波输出到单片机,两个涡流传感器共需要两路的比较器。
LM339的优点是OC 门输出,信号从反相端输入,同相端的比较电压是0~5V 连续可调,可以根据实际电路设置2.5~3.5V 之间的参考电压,运放电源是12V 供电,输出给单片机的信号选择5V 电源,这样输出高电平可以达到V ,满足单片机对高电平的要求。
图4LM339比较器原理图3电路与程序设计3.1总体电路总体电路主要是由STC12C5A32S2单片机构成最小系统,包括液晶显示和4∗4键盘输入,两路的涡流传感器电路,LM339构成的比较整形电路构成,同时有辅助的接口和蜂鸣器报警电路。
在设计最小系统板的时候设置了多个12V 和5V 的电源接口,为连接后续的各种板子带来很多方便。
3.2程序设计采用C 语言编程实现,利用Keil 编程软件,实现设计和编译的工作。
程序流程如图5所示,当测量开始时,程序先进行初始化,然后读入键盘信息,根据基本和发挥部分的六个要求分成摆动周期控制、角度测量、钢珠放入累计、运动方向指示等四个子程序,其中角度测量分成传感器距离是否超过20mm ,两个程序在控制时会有简单和复杂的控制。
钢珠累计程序也判断两部分,当距离是20mm 的时候,钢珠是一次性倒入2~10颗,基本部分可以间隔<1s 内累计放入。
图5主程序流程图4测试方案与测试结果4.1调试方法与仪器1)测试方案。
在室内环境下,根据题目要求,首先是测试基本部分,放入符合要求的钢珠在管道内,实现题目要求的各项功能。
第一次测基本部分传感器距离任意设置,第二次测量发挥部分把传感器距离固定在20mm 。
2)测试仪器装置。
电源适配器(12V )、单片机控制系统、液(下转第147页)表1钢珠放入个数与显示个数(两个传感器距离50mm )表2钢珠运动方向测试(两个传感器距离50mm)表3钢珠运动和角度显示(两个传感器距离50mm )(上接第143页)晶显示器、4∗4键盘、自制的管道控制装置(含量角器)、示波器、涡流传感器及比较器电路。
表5一次性放入钢珠数显示个数(两个传感器距离20mm )4.2测试结果分析从表1~表3是基本部分的测试数据,无论是对钢珠的个数统计、钢珠的运动方向控制显示、角度测量均能灵活实现,表4~表6是发挥部分的要求,管道来回摆动均能正确统计次数,一次性快速放入的钢珠也能完全正确捕捉到,根据钢珠的运动来显示角度相对较难,但是也实现了。
参考文献[1]贾立新,王涌,陈怡.电子技术系统设计与实践[M ].北京:清华大学出版社,2007[2]谭祖根,陈守川.电涡流传感器的基本原理分析与参数选择[J ].仪器仪表学报,1980,1(1):113-122[收稿日期:2018.11.20]手动模式:实现单个振打器振打功能;矩阵模式:根据电磁振打器编号依次进行振打;分组模式:根据阴阳极及高压电场分组情况,以组为单位,根据时间设定关系进行电磁振打;N 模式:在分组模式基础上,按设定N 组对需要加强清灰的极板/极线或高压电场进行清灰。
西门子PLC S7-300系列电磁振打功能库调用程序如下:CALL″EH″熏DB1EH _able 押=″EH1″.EH _able ENDDZD _able 押=″EH1″.ENDDZD _able DZQ 押=″EH1″.DZQ GRP _HOW 押=″EH1″.GRP _HOW RAP _HOW 押=″EH1″.RAP _HOW Angle _all押=″EH1″.Angle _allRAP _interval 押=″EH1″.RAP _interval Current _over 押=″EH1″.Current _over Voltage _over1押=″EH1″.Voltage _over1Voltage _over2押=″EH1″.Voltage _over2MMC 押=″EH1″.MMC GRP _M 押=″EH1″.GRP _M RAP _N0押=″EH1″.RAP _N0RAP _ADDR 押=″EH1″.RAP _ADDR JS _In押=″EH1″.JS _InCUR _RAP _HIGH 押=″EH1″.CUR _RAP _HIGH PQW _out 押=″EH1″.PQW _out ADDR _OUT 押=″EH1″.ADDR _OUT TBXH 押=″EH1″.TBXH SW _gate 押=″EH1″.SW _gate EH _Reset 押=″EH1″.EH _Reset EH _mode 押=″EH1″.EH _mode Angle _mode 押=″EH1″.Angle _mode IPC _SET _NO 押=″EH1″.IPC _SET _NO IPC _SET _TIME 押=″EH1″.IPC _SET _TIMECur _grp 押=″EH1″.Cur _grpCUR _RAP _NO押=″EH1″.CUR _RAP _NOCUR _RAP _state押=″EH1″.CUR _RAP _stateState _word 押=″EH1″.State _wordRAP _ZD _course押=″EH1″.RAP _ZD _courseNOP4)自定义通讯数据结构:为解决大中型PLC 与IPEC 监控系统不兼容的问题,采用开源方案开发了基于IPEC 的TCP /IP-S7通讯驱动程序,实现西门子PLC 与IPEC 监控系统的无缝连接,施耐德和AB 品牌的PLC 则采用TCP /IP-Modbus 协议进行通讯互连,并制定了《PLC 与IPC 系统通讯数据结构(Modbus 和S7协议)V2.0》。