力学分析软件的简单介绍
CFD技术介绍
4.2 CFX CFX是由英国AEA公司开发,是一种实用流体工程分析工具,用 于模拟流体流动、传热、多相流、化学反应、燃烧问题。其优势在 于处理流动物理现象简单而几何形状复杂的问题。适用于直角/柱面 /旋转坐标系,稳态/非稳态流动,瞬态/滑移网格,不可压缩/弱可压 缩/可压缩流,浮力流,多相流,非牛顿流体,化学反应,燃烧, NOx生成,辐射,多孔介质及混合传热过程。CFX采用有限元法, 自动时间步长控制,SIMPLE算法,代数多网格、ICCG、Line、 Stone和Block Stone解法。能有效、精确地表达复杂几何形状,任意 连接模块即可构造所需的几何图形。在每一个模块内,网格的生成 可以确保迅速、可靠地进行,这种多块式网格允许扩展和变形,例 如计算气缸中活塞的运动和自由表面的运动。 滑动网格功能允许网 格的各部分可以相对滑动或旋转,这种功能可以用于计算牙轮钻头 与井壁间流体的相互作用。
特殊领域的应用: Icepak,Airpak,Mixsim。
3. 使用CFD软件基本原则
要使用CFD,首先明确研究对象性质,建立研究对象物理模型, 并在此基础上建立研究对象数学模型;然后将流体流动的物理特 性应用到模拟计算模型;最后通过CFD软件输出所需的流体性质。 使用CFD软件,至少基于以下三点: 通常很难模型化的系统,而CFD分析能够展示别的手段所不能揭 示的系统的性质和现象,因为CFD对你的设计提供很强的可视能 力;
STAR-cd能处理移动网格,用于多级透平的计算,在差分格式方 面,纳入了一阶UpWIND,二阶UpWIND,CDS,QUICK,以及一 阶 UPWIND 与 CDS 或 QUICK 的 混 合 格 式 , 在 压 力 耦 合 方 面 采 用 SIMPLE,PISO以及称为SIMPLO的算法。在湍流模型方面,有k-e, RNK-ke,ke两层等模型,可计算稳态,非稳态,牛顿,非牛顿流体, 多孔介质,亚音速,超音速,多项流等问题.
PKPM操作步骤
PKPM操作步骤PKPM(结构分析程序)是一款用于进行结构力学分析的计算软件,广泛应用于建筑、桥梁、塔楼等工程结构的设计与计算中。
它可以根据用户输入的结构参数和荷载条件进行静力学和动力学分析,得出结构的受力状态和变形情况。
下面是PKPM的基本操作步骤:1.打开PKPM软件。
双击桌面上的PKPM图标或通过开始菜单找到PKPM程序并运行。
2.创建新项目。
在软件界面的菜单栏上选择“文件”-“新建”,弹出新建项目对话框。
在对话框中填写项目名称、单位制和其他相关参数,然后点击“确定”按钮。
3.添加节点。
在PKPM软件的工作界面中,选择添加节点工具,即鼠标指针样式变为十字符号,然后点击鼠标左键添加节点。
根据结构的具体形状依次添加节点,每个节点都会自动编号。
4.添加单元。
在PKPM软件中,单元是连接节点的杆件或板单元,可以使用不同类型的单元来模拟不同材料和截面形状的构件。
选择添加单元工具,即鼠标指针变为箭头形状,在节点上点击鼠标左键,然后拖动到另一个节点上并释放鼠标左键,即可添加一个单元。
6.设置边界条件。
在结构分析中,需要设置边界条件以限制结构的自由度。
选择边界条件工具,在界面上选中相应的节点,然后指定边界条件,例如约束位移或约束力与力矩。
7.添加荷载。
在PKPM软件中,可以添加多种类型的荷载来模拟实际工程中的荷载情况。
选择添加荷载工具,在界面上选中相应的节点或单元,然后选择荷载类型,输入荷载参数,例如大小、方向和作用位置等。
8.进行分析。
在设置好节点、单元、边界条件和荷载后,即可进行结构的分析计算。
选择分析工具,在软件界面中选择静力学或动力学分析类型,然后点击“分析”按钮开始计算。
9.查看分析结果。
分析完成后,可以查看结构的受力状态和变形情况。
选择查看结果工具,在软件界面中选择相应的结果显示方式,例如位移、应力和应变等,并选择显示范围和显示格式。
10.保存项目。
在分析完成并查看结果后,可以选择保存项目,以便将来使用或修改。
hypermesh静力学位移载荷曲线-概述说明以及解释
hypermesh静力学位移载荷曲线-概述说明以及解释1.引言1.1 概述:在工程设计中,静力学是一种重要的分析方法,用于评估结构在受力情况下的行为和性能。
在静力学分析过程中,我们常常需要关注结构的位移和载荷之间的关系,以便更好地了解结构在承受外部载荷时的行为。
Hypermesh作为一款专业的有限元前后处理软件,提供了丰富的功能和工具,能够帮助工程师进行静力学分析,包括位移载荷曲线的绘制和分析。
本文将通过介绍Hypermesh的基本情况、静力学概念和位移载荷曲线分析等内容,探讨如何利用Hypermesh进行静力学分析,帮助工程师更好地理解和评估结构的性能。
1.2 文章结构本文主要分为三个部分,分别是引言、正文和结论。
在引言部分中,我们将简要介绍文章的背景和意义,明确文章的目的,并概述本文的结构安排。
在正文部分,我们将首先介绍Hypermesh软件的基本情况,然后讨论静力学的相关概念,最后深入探讨位移载荷曲线分析的方法和应用。
在结论部分,我们将对本文进行总结,对所得结果进行分析和讨论,并对未来研究方向进行展望。
通过这样的结构安排,我们旨在全面而系统地探讨hypermesh静力学位移载荷曲线的研究内容,为读者提供清晰的理解和指导。
1.3 目的本文旨在探讨hypermesh在静力学位移载荷曲线分析中的应用。
通过对hypermesh软件的简介和静力学概念的讲解,结合具体实例,深入探讨位移载荷曲线分析的方法和步骤。
通过本文的阐述,读者可以更加深入地理解hypermesh软件在静力学分析中的应用,掌握位移载荷曲线分析的技巧,从而为工程实践提供参考和借鉴。
同时,本文还将对结果进行分析和展望,为读者提供更为全面的视角和思路。
通过本文的研究,旨在促进工程领域中静力学位移载荷曲线分析技术的进步与发展。
2.正文2.1 Hypermesh简介Hypermesh是一款广泛应用于有限元分析(FEA)领域的专业建模软件,由Altair公司开发。
FLUENT软件简单介绍
FLUENT软件简单介绍FLUENT是一种流体力学仿真软件,由美国ANSYS公司开发。
它提供了先进的流体流动和传热分析功能,广泛应用于各个领域,包括汽车工业、航空航天、能源和环境等。
FLUENT的主要功能包括流体流动分析、传热分析、压力分析以及结构力学分析等,可以帮助工程师和设计师进行流体流动问题的解决和优化,提高产品设计的效率和性能。
FLUENT的用户界面简洁直观,提供了丰富的前后处理工具和可视化功能,使用户能够方便地设置仿真模型、设定边界条件、运行仿真计算,并对结果进行分析和展示。
FLUENT支持多种模型和求解方法的选择,用户可以根据具体需求来选择适合的方法来进行仿真计算。
此外,FLUENT还提供了丰富的物性数据和材料模型库,用于模拟不同流体和材料的性质和行为。
FLUENT的应用领域非常广泛。
在汽车工业中,FLUENT可以模拟车辆的气动特性和燃烧过程,用于改善车辆的空气动力性能和燃烧效率。
在航空航天领域,FLUENT可以仿真飞机的气动力学表现和燃烧过程,用于改善飞机的飞行性能和燃烧效率。
在能源领域,FLUENT可以模拟电站的热力循环和传热过程,用于提高电力发电效率。
在环境领域,FLUENT可以模拟气候变化、水质污染和废气排放等问题,用于评估和优化环境影响。
总之,FLUENT是一款功能强大的流体力学仿真软件,提供了先进的流体流动和传热分析功能。
它在各个领域都有广泛的应用,可以帮助工程师和设计师解决复杂的流体流动问题和优化产品设计。
通过使用FLUENT,可以提高工程设计的效率和性能,降低开发成本和风险,推动科技进步和工程技术的发展。
CFD软件介绍
CFD是所有计算流体力学的软件的简称。
CFD是专门用来进行流场分析、流场计算、流场预测的软件。
通过CFD软件,可以分析和显示发生在流场中的现象。
在短时间内能预测性能并通过修改各种参数来达到最佳设计效果。
CFD 软件结构由前处理、求解器、后处理组成。
即前处理,计算和结果数据生成以及后处理。
前处理通常要生成计算模型所必需的数据。
这一过程通常包括建模,数据录入(或从CAD中导入),生成网格等;做完了前处理后,CFD的核心求解器将根据具体的模型,完成相应的计算任务,并生成结果数据;后处理过程通常是对生成的结果数据进行组织和诠释,以直观可视的图形形式输出。
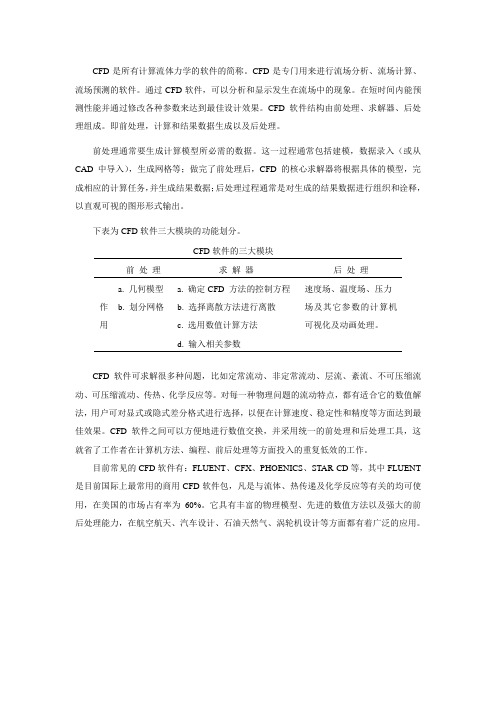
下表为CFD软件三大模块的功能划分。
CFD软件的三大模块前处理求解器后处理作用a. 几何模型b. 划分网格a. 确定CFD 方法的控制方程b. 选择离散方法进行离散c. 选用数值计算方法d. 输入相关参数速度场、温度场、压力场及其它参数的计算机可视化及动画处理。
CFD软件可求解很多种问题,比如定常流动、非定常流动、层流、紊流、不可压缩流动、可压缩流动、传热、化学反应等。
对每一种物理问题的流动特点,都有适合它的数值解法,用户可对显式或隐式差分格式进行选择,以便在计算速度、稳定性和精度等方面达到最佳效果。
CFD软件之间可以方便地进行数值交换,并采用统一的前处理和后处理工具,这就省了工作者在计算机方法、编程、前后处理等方面投入的重复低效的工作。
目前常见的CFD软件有:FLUENT、CFX、PHOENICS、STAR-CD等,其中FLUENT 是目前国际上最常用的商用CFD软件包,凡是与流体、热传递及化学反应等有关的均可使用,在美国的市场占有率为60%。
它具有丰富的物理模型、先进的数值方法以及强大的前后处理能力,在航空航天、汽车设计、石油天然气、涡轮机设计等方面都有着广泛的应用。
力学分析开源软件简介

Palabos (/)PalaBos的是一款高效的流体模拟及其建模库,开发基于C++的STL(标准模板库),有极强的拓展性!尽管其源代码是开放,但是基于PalaBos的FlowKit公司已于2011年9月开始运营(/),主要为流体力学相关领域提供解决方案,并定制软件。
主要的开发者为我的日内瓦朋友Jonas Latt博士,另外一个重要开发成员Orestis博士也是我的合作者和好朋友,其主要的贡献在于湍流模型和多块加密的代码的开发。
在版本1.0中,目前二维的多块加密是可用的,三维的曲面边界可用,需要提供stl几何文件(参:examples/showCases/aneurysm)。
PalaBos的主要特点在于,其在并行结构上采取并行机制与模型分离的方式,使得应用建模与并行机制不相关。
这也使得PalaBos 的易于扩展。
下面举例来说明其代码特点:对于二维计算下面两个基本的文件必须包括#include "palabos2D.h"#include "palabos2D.hh"#include <vector>#include <cmath>#include <iostream>#include <fstream>#include <iomanip>基本的名字空间using namespace plb;using namespace plb::descriptors;using namespace std;typedef double T;基本模型的描述。
对于PalaBos,众多模型的应用,都是通过DnQmDescriptor 来描述的。
用户可自定义!#define DESCRIPTOR D2Q9Descriptor初场的定义,建议使用这种方法T poiseuilleV elocity(plintiY, IncomprFlowParam<T>const& parameters) {T y = (T)iY / parameters.getResolution();return 4.*parameters.getLatticeU() * (y-y*y);}压力的定义T poiseuillePressure(plintiX, IncomprFlowParam<T>const& parameters) {T Lx = parameters.getNx()-1;T Ly = parameters.getNy()-1;return 8.*parameters.getLatticeNu()*parameters.getLatticeU() / (Ly*Ly) * (Lx/(T)2-(T)iX);}密度场的定义T poiseuilleDensity(plintiX, IncomprFlowParam<T>const& parameters) {return poiseuillePressure(iX,parameters)*DESCRIPTOR<T>::invCs2 + (T)1; }根据坐标进行速度初始化template<typename T>class PoiseuilleV elocity {public:PoiseuilleV elocity(IncomprFlowParam<T> parameters_): parameters(parameters_){ }void operator()(plintiX, plintiY, Array<T,2>& u) const {u[0] = poiseuilleV elocity(iY, parameters);u[1] = T();}private:IncomprFlowParam<T> parameters;};根据坐标进行密度初始化template<typename T>class PoiseuilleDensity {public:PoiseuilleDensity(IncomprFlowParam<T> parameters_): parameters(parameters_){ }T operator()(plintiX, plintiY) const {return poiseuilleDensity(iX,parameters);}private:IncomprFlowParam<T> parameters;};零速度场初始化template<typename T>class PoiseuilleDensityAndZeroV elocity {public:PoiseuilleDensityAndZeroV elocity(IncomprFlowParam<T> parameters_): parameters(parameters_){ }void operator()(plintiX, plintiY, T& rho, Array<T,2>& u) const {rho = poiseuilleDensity(iX,parameters);u[0] = T();u[1] = T();}private:IncomprFlowParam<T> parameters;};枚举类型,表示边界类型enumInletOutletT {pressure, velocity};建立几何void channelSetup( MultiBlockLattice2D<T,DESCRIPTOR>& lattice, IncomprFlowParam<T>const& parameters, OnLatticeBoundaryCondition2D<T,DESCRIPTOR>&boundaryCondition, InletOutletTinletOutlet ){constplintnx = parameters.getNx();constplintny = parameters.getNy();下边界boundaryCondition.setV elocityConditionOnBlockBoundaries (lattice, Box2D(0, nx-1, 0, 0) );上边界boundaryCondition.setV elocityConditionOnBlockBoundaries (lattice, Box2D(0, nx-1, ny-1, ny-1) );设置相关边界if (inletOutlet == pressure) {boundaryCondition.setPressureConditionOnBlockBoundaries (lattice, Box2D(0,0, 1,ny-2) );boundaryCondition.setPressureConditionOnBlockBoundaries (lattice, Box2D(nx-1,nx-1, 1,ny-2) );}else {boundaryCondition.setV elocityConditionOnBlockBoundaries (lattice, Box2D(0,0, 1,ny-2) );boundaryCondition.setV elocityConditionOnBlockBoundaries (lattice, Box2D(nx-1,nx-1, 1,ny-2) );}设置常密度和速度,边界的速度和密度同时被施加setBoundaryDensity (lattice, lattice.getBoundingBox(),PoiseuilleDensity<T>(parameters) );setBoundaryV elocity (lattice, lattice.getBoundingBox(),PoiseuilleV elocity<T>(parameters) );初始化平衡态initializeAtEquilibrium (lattice, lattice.getBoundingBox(),PoiseuilleDensityAndZeroV elocity<T>(parameters) );初始化模拟系统lattice.initialize();}图片文件保存void writeGif(MultiBlockLattice2D<T,DESCRIPTOR>& lattice, plintiter){constplintimSize = 600;ImageWriter<T>imageWriter("leeloo");imageWriter.writeScaledGif(createFileName("u", iter, 6),*computeV elocityNorm(lattice),imSize, imSize );}VTK 保存void writeVTK(MultiBlockLattice2D<T,DESCRIPTOR>& lattice, IncomprFlowParam<T>const& parameters, plintiter){T dx = parameters.getDeltaX();T dt = parameters.getDeltaT();VtkImageOutput2D<T>vtkOut(createFileName("vtk", iter, 6), dx);vtkOut.writeData<float>(*computeV elocityNorm(lattice), "velocityNorm", dx/dt); vtkOut.writeData<2,float>(*computeV elocity(lattice), "velocity", dx/dt);}计算均方根误差T computeRMSerror ( MultiBlockLattice2D<T,DESCRIPTOR>& lattice, IncomprFlowParam<T>const& parameters ){MultiTensorField2D<T,2>analyticalV elocity(lattice);setToFunction( analyticalVelocity, analyticalV elocity.getBoundingBox(), PoiseuilleV elocity<T>(parameters) );MultiTensorField2D<T,2>numericalV elocity(lattice);computeV elocity(lattice, numericalVelocity, lattice.getBoundingBox());return 1./parameters.getLatticeU() *std::sqrt( computeAverage( *computeNormSqr(*subtract(analyticalV elocity, numericalV elocity)) ) );}主函数int main(intargc, char* argv[]) {plbInit(&argc, &argv);global::directories().setOutputDir("./tmp/");基本参数,Orestis为我加入了另外的个构造函数,可直接在物理空间中定义这些参数!后续我将给出分析!IncomprFlowParam<T> parameters((T) 2e-2, // uMax(T) 5., // Re60, // N3., // lx1. // ly);const T logT = (T)0.1;const T imSave = (T)0.5;const T vtkSave = (T)2.;const T maxT = (T)15.1;constInletOutletTinletOutlet = velocity;写日志文件writeLogFile(parameters, "Poiseuille flow");使用MultiBlockLatticeMultiBlockLattice2D<T, DESCRIPTOR> lattice (parameters.getNx(), parameters.getNy(),设置松弛参数new BGKdynamics<T,DESCRIPTOR>(parameters.getOmega()) );声明边界OnLatticeBoundaryCondition2D<T,DESCRIPTOR>*boundaryCondition = createLocalBoundaryCondition2D<T,DESCRIPTOR>(); channelSetup(lattice, parameters, *boundaryCondition, inletOutlet);主循环for (plintiT=0; iT*parameters.getDeltaT()<maxT; ++iT) {if (iT%parameters.nStep(imSave)==0) {pcout<< "Saving Gif ..." <<endl;writeGif(lattice, iT);}if (iT%parameters.nStep(vtkSave)==0 &&iT>0) {pcout<< "Saving VTK file ..." <<endl;writeVTK(lattice, parameters, iT);}if (iT%parameters.nStep(logT)==0) {pcout<< "step " <<iT<< "; t=" <<iT*parameters.getDeltaT()<< "; RMS error=" <<computeRMSerror(lattice, parameters);Array<T,2>uCenter;lattice.get(parameters.getNx()/2,parameters.getNy()/2).computeV elocity(uCenter); pcout<< "; center velocity=" <<uCenter[0]/parameters.getLatticeU() <<endl;}碰撞迁移,此函数不再有bool类型参数,其不同于Openlblattice.collideAndStream();}删除边界对象delete boundaryCondition;}由此上面代码可以看出,PalaBos的结构是非常清晰的,用户在实现过程也异常的简单!——以上资料出自/s/blog_6a40fba10100znv9.htmlParaview (/)Paraview是一种开放源代码的,多平台数据分析和可视化软件包,使用Paraview 可以快速的进行数据的定量及定性分析。
ABAQUS介绍
最先进的大型通用非线性有限元分析软件——ABAQUS1、概述美国ABAQUS软件公司成立于1978年,总部位于美国罗德岛博塔市,专门从事非线性有限元力学分析软件ABAQUS的开发与维护。
公司总部雇员400余人,其中近130余人具有工程或计算机博士学位,近120人具有硕士学位,被公认为世界上最大且最优秀的固体力学研究团体。
ABAQUS公司不断吸取最新的分析理论和计算机技术,领导着全世界非线性有限元技术的发展。
ABAQUS是国际著名的CAE软件,它以其强大的非线性分析功能以及解决复杂和深入的科学问题的能力赢得广泛称誉。
ABAQUS软件已被全球工业界广泛接受,并拥有世界最大的非线性力学用户群。
ABAQUS已成为国际上最先进的大型通用非线性有限元分析软件。
ABAQUS软件,除普通工业用户外,也在以高等院校、科研院所等为代表的高端用户中得到广泛。
研究水平的提高引发了用户对高水平分析工具需求的加强,作为满足这种高端需求的有力工具,ABAQUS软件在各行业用户群中所占据的地位也越来越突出。
ABAQUS是一个推崇技术的公司,它始终走在结构力学研究和软件化领域的前沿,它良好的品质和服务得到业界的广泛认可。
制造业是ABAQUS最重要的应用领域之一,拥有NASA、罗克希德-马丁、波音、空中客车等长期合作的用户。
对制造业很多复杂和特殊的问题,如热传导、爆炸冲击、流固耦合、疲劳断裂、复合材料损伤、接触连接、金属塑性等,在所有的CAE软件中,ABAQUS是最有优势的。
目前ABAQUS软件在中国的用户已超过800家,涵盖汽车、航空航天、船舶、武器、工程机械、建筑、电子、石化和核能源等各个领域,如宝山钢铁集团、长春一汽、上海泛亚、中国船级社、北京石化设计院、江钻股份、摩托罗拉和诺基亚等。
2、功能介绍ABAQUS软件的功能可以归纳为线性分析、非线性分析和机构分析三大块。
线性静力学、动力学和热传导o静强度/刚度、动力学和模态、热力学和声学等o金属和复合材料、应力、振动、声场、压电效应等∙非线性和瞬态分析o汽车碰撞、飞机坠毁、电子器件跌落, 冲击和损毁等o复合材料损伤、接触, 塑性失效, 断裂和磨损, 橡胶超弹性等∙多体动力学分析o起落架收放、副翼展开、汽车悬架、微机电系统MEMS、医疗器械等o结合刚体和柔体模拟各种连接件,进行运动过程的力学分析3、模块介绍ABAQUS软件主要由ABAQUS/CAE,ABAQUS/Standard,ABAQUS/Explicit三个模块组成。
ABAQUS线性静力学分析实例
ABAQUS线性静力学分析实例ABAQUS(全称为Abaqus FEA)是一种广泛使用的有限元分析软件。
它可用于进行结构、热、电、磁、多物理场等各类工程问题的数值模拟和分析。
在本文中,我们将介绍一个ABAQUS线性静力学分析的实例。
假设我们要分析一个悬臂梁的变形和应力分布。
悬臂梁是一种常见的结构,通常由一根固定在一端的梁杆组成,另一端悬空。
我们将使用ABAQUS来计算这个悬臂梁的变形和应力。
首先,我们需要创建模型。
在ABAQUS中,可以通过几何建模或直接输入节点和单元的方式来创建模型。
这里我们使用几何建模来构建一个悬臂梁。
在ABAQUS的图形用户界面中,选择"Part",然后使用"Sketch"工具绘制悬臂梁的剖面。
在剖面绘制完成后,选择"Extrude"工具将其拉伸为所需长度。
接下来,我们需要定义材料特性。
在这个实例中,我们假设悬臂梁是由钢材料构成的。
在ABAQUS中,可以通过创建相应的材料属性来定义材料的性能。
选择"Material",然后创建一个具有适当材料属性的钢材料。
随后,我们需要定义悬臂梁的边界条件。
在这个实例中,我们将在悬臂梁的固定端施加一个约束,防止其发生位移。
在ABAQUS中,可以选择"Assembly",然后选择"Constraints"来设置边界条件。
在这里我们选择固定一个端点。
完成边界条件的设置后,我们需要划分网格。
在ABAQUS中,使用网格划分将悬臂梁划分成小的单元,以便数值计算。
选择"Mesh",然后选择适当的网格划分方式和单元类型。
然后,我们需要定义加载条件。
在这个实例中,我们将在悬臂梁的空悬端施加一个垂直向下的加载。
在ABAQUS中,可以选择"Loading",然后选择适当的加载类型和大小。
现在,所有的模型设置都完成了,我们可以进行分析。
ANSYS有限元分析入门与应用指南
ANSYS有限元分析入门与应用指南第一章:ANSYS有限元分析概述ANSYS是一种常用于工程领域的有限元分析软件,主要用于对各种结构进行力学分析、流体动力学分析、热传导分析等。
本章将对ANSYS的基本原理、工作流程和应用领域进行介绍。
1.1 ANSYS的基本原理ANSYS基于有限元方法,将实际结构或系统离散为有限数量的单元,通过对单元进行各种物理特性的分析,最终得到整个结构的行为。
有限元方法是一种数值分析方法,可以有效解决传统方法难以处理的复杂问题。
1.2 ANSYS的工作流程ANSYS的工作流程包括几个关键步骤:前处理、求解和后处理。
前处理阶段主要负责模型的建立和单元网格的划分,求解阶段进行物理场的计算和求解,后处理阶段对结果进行可视化和分析。
1.3 ANSYS的应用领域ANSYS可应用于各个工程领域,如固体力学、流体力学、热传导、电磁场等。
在航空航天、汽车工程、建筑结构、电子设备等领域都有广泛的应用。
第二章:ANSYS建模与前处理在使用ANSYS进行有限元分析之前,需要对模型进行建模和前处理工作。
本章将介绍ANSYS建模的基本方法和前处理的必要步骤。
2.1 模型建立ANSYS提供了多种建模方法,包括几何建模、CAD导入、脚本编程等。
用户可以根据需要选择合适的建模方法,对模型进行几何设定。
2.2 材料定义和属性设置在进行有限元分析之前,需要为材料定义材料性质和属性。
ANSYS提供了多种材料模型,用户可以根据具体需求进行选择和设置。
2.3 网格划分网格划分是有限元分析中非常重要的一步,它决定了模型的离散精度和计算效果。
ANSYS提供了多种单元类型和划分算法,用户可以根据需要进行合理的网格划分。
第三章:ANSYS求解与后处理在进行前处理完成后,就可以进行有限元分析的求解和后处理了。
本章将介绍ANSYS的求解方法和后处理功能。
3.1 求解方法ANSYS提供了多种求解方法,如直接法、迭代法等。
根据模型的复杂程度和求解要求,用户可以选择合适的方法进行求解。
patran静力分析实例解析
patran静力分析实例解析在工程领域中,对于结构和构件的力学性能进行分析和评估是非常重要的。
其中一种常用的分析方法是静力分析,它对结构在静止状态下受力情况进行研究和计算。
本文将以patran静力分析为例,介绍静力分析的基本概念、方法和应用。
一、静力分析简介静力分析是工程力学中的基础分析方法之一,它主要研究结构在静力平衡条件下的受力和变形情况。
通过对结构的受力分析,可以评估结构的安全性、稳定性和可靠性,为结构设计和改进提供基础数据。
二、patran静力分析软件介绍patran是一款常用的工程分析软件,它提供了丰富的分析和建模工具,可以对各种工程问题进行分析和求解。
静力分析是patran软件中的一个重要功能模块,它可以对结构进行受力分析和变形计算,得到结构的应力、变形和位移等结果。
三、patran静力分析的应用案例为了更好地理解和应用patran静力分析,下面将以一个简单的梁结构为例进行实例解析。
1. 问题描述考虑一个跨度为10米的简支梁结构,梁的材料为钢,截面形状为矩形。
施加在梁上的载荷为均布载荷,大小为1000牛顿/米。
要求通过patran静力分析求解该梁结构在受力情况下的弯矩分布和变形情况。
2. 建模和分析步骤(1)在patran软件中创建一个新的工程文件,并定义梁的几何形状和材料属性。
(2)引入约束条件,对梁进行简支约束。
(3)施加均布载荷,定义载荷的大小和分布情况。
(4)选择适当的求解方法和计算参数,进行静力分析求解。
(5)查看分析结果,包括弯矩分布和梁的变形情况。
3. 结果分析和讨论根据patran静力分析求解的结果,可以得到梁结构在受力情况下的弯矩分布图和变形图。
通过分析这些结果,可以评估梁的结构性能是否满足设计要求。
如果发现弯矩超过了材料的承载能力,就需要对梁进行结构优化或者增加支撑措施。
四、总结静力分析是工程领域中常用的分析方法,具有重要的理论和实际应用价值。
patran静力分析软件提供了快速精确的分析工具,可以帮助工程师进行结构分析和设计。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
前言 软件只是工具,多用就能熟练,而理论 知识才是软件的灵魂,掌握必要的理论知 识 有助于正确的使用软件以及理解软件 识,有助于正确的使用软件以及理解软件 各个数据的含义。
1.应力 1. 应 应力 应力的国际单位是Pa 应力的国际单位是 Pa,也就是牛 ,也就是牛/ /米2,简 单来说就是指单位面积上物体所受到的力 它 单来说就是指单位面积上物体所受到的力,它 是衡量物体受力状态是否安全的重要参数,正 应力的代号是“σ”、剪应力的代号是 应力的代号是 剪应力的代号是“τ”。
2.应变 2. 应变 应变的国际单位是1 应变的国际单位是 1,简单来说就是指杆件 的绝对伸长量与杆件长度的比值,代号为 “ε”。
3 弹性模量 3.弹性模量 3. 弹性模量的单位是Pa 弹性模量的单位是 Pa,和应力单位一 ,和应力单位一 致,对于同一种材料,它是衡量应力与应 变关系的常量,也就是说弹性模量只与物 体的材质有关。
弹性模量的代号为“E 体的材质有关。
弹性模量的代号为“ E”。
4.物体的几种受力状态 4 4.物体的几种受力状态 ㈠ 受压受拉状态 物体两端受挤压力或拉伸力的状态,此 时的物体只受正应力 正应力= 时的物体只受正应力,正应力= 时的物体只受正应力,正应力 正应力=端部力 端部力/ /物 体截面积。
㈡ 受剪受扭状态 剪 态 受剪状态主要是指杆件长度与杆件截面 相差不大时,杆件两端固定,中间受垂直 于杆件截面的力的状态 例如销轴 剪应 于杆件截面的力的状态,例如销轴。
剪应 力=中间垂直力 中间垂直力的一半 的一半/ /杆件截面积。
受扭状态属于选修概念,是指杆件受 到垂直于杆件截面的扭矩的状态,该状态 下的杆件产生的也是剪应力,圆柱截面的 下的杆件产 的 是剪应 圆柱截面的 剪应力计算公式为: τ=Mn Mn/ /Wn 其中,Wn 其中, Wn= =Ip/ρMAX Ip是圆柱截面极惯性矩 是圆柱截面极惯性矩I Ip= πD4/32 ρMAX圆柱截面半径 矩形截面的剪应力计算公式为: 截 剪 计算 τ=Mn×bmax/IK 其中b 其中 bmax是最长边长度; 是最长 长度 IK=1/3 是最长边长度;I =1/3Σ 1/3Σ 1/3 Σhibi3
㈢受弯状态【重点 ㈢受弯状态【 重点】 】 受弯状态是指当杆件长度远大于杆件 截面时 受到与杆件轴线相垂直的荷载 截面时,受到与杆件轴线相垂直的荷载, 在这样的荷载下杆件会变弯,其轴线由原 来的直线变成了曲线 这种受力变形状态 来的直线变成了曲线,这种受力变形状态 叫做受弯状态。
杆件在受弯状态时产生的应力有弯曲 杆件在受弯 态时产 应 有弯曲 正应力和剪切应力,但弯曲应力往往是衡 量杆件是否会发生破坏的参数,因为在这 件 参 种状态下剪切应力还远远没有达到杆件材 料许用的剪应力时,弯曲正应力就已经超 过杆件材料许用的正应力值了。
下面举一 个简单的例子进行证明:
一根2m长的 一根2m 长的Ι Ι 10 10的 的Q235B材质的工字钢 Q235B材质的工字钢 中间位置受到一个50KN 中间位置受到一个 50KN的作用力时,工字钢 的作用力时,工字钢 是被“剪断”还是被“弯断”? 工字钢的截面积是14.345cm2 工字钢的截面积是 14.345cm2,截面抗弯 ,截面抗弯 模量是 模量是49cm3 是49cm3,工字钢受到的最大剪力为 ,工字钢受到的最大剪力为 字 剪 25KN,最大弯矩为 25KN ,最大弯矩为25KN 25KN· ·M。
那么工字钢受到的剪应力为: 那么 字钢受到的剪应力为: τ=25000/(14.345 ×10-4)=17.4MPa 工字钢受到的弯曲正应力为: 工字钢受到的弯曲正应力为 σ=25000/(49 ×10-6)=510.2MPa Q235B材质的钢材许用剪应力是 Q235B 材质的钢材许用剪应力是125MPa 125MPa, , 许用正应力是215MPa 许用正应力是 215MPa,那么工字钢是被“剪 ,那么工字钢是被“剪 断” 是被“弯断” 断”还是被“弯断”也就显而易见了。
关于弯曲应力的计算,上面的例子已经 提到,也就是弯曲应力= 提到,也就是弯曲应力 =弯矩 弯矩/ /截面抗弯模 =M/W 量,公式即: σ=M/ M/W M/ Wx,其中 Wx=Ix/ymax Ix是截面惯性矩 ymax是截面重心距上下边最远的距离 截面抗弯模量W 截面抗弯模量 Wx只与杆件的截面形状 有关,与材质、外力等毫无关系。
有关 ,与材质、外力等毫无关系。
等毫 那么要计算杆件的最大弯曲应力,就 只需要知道杆件的最大弯矩和杆件的抗弯 模量即可。
模量即可
感谢万能的计算机,最大弯矩可以通 过电脑计算得出;而截面抗弯模量,单型 钢的杆件可以通过查表查出,组合截面的 抗弯模量计算较为复杂,因时间有限,就 不进行介绍了 有兴趣的下来可以进行探 不进行介绍了,有兴趣的下来可以进行探 讨。
㈣弯曲变形 前面已经介绍了各种应力的计算方法, 然而应力与应变是相辅相成的,应变的集 合就是变形。
我们经常要求杆件在受到外 力的作用时 不仅不能发生破坏 对于其 力的作用时,不仅不能发生破坏,对于其 外形轮廓的变形量往往也有个容许范围, 也就是专业术语中的:不仅要满足强度要 求,同时也要满足刚度要求。
工作中,我们接触到的变形概念主要 是挠度 材料力学里对于挠度是这样定义 是挠度,材料力学里对于挠度是这样定义 的:横截面形心(即轴线上的点)在垂直 于x轴方向的线位移,称为该截面的挠度。
轴方 线位 称为该截 挠度
关于挠度: 挠度 挠度的理论公式是通过挠曲线近视微 论公式是 过挠曲线近视微 分方程及其积分计算而得到的,计算过程 相当复杂,如何得出公式有兴趣的可以自 复 式 行去了解。
下面列举一个均布载荷的简支 梁的挠度公式: ω=5ql 5ql4/(384EI) q:均布载荷 l:简支梁长度 E 弹性模量 I: E: I 惯性矩 可见挠度除外力以为,只与弹性模量、 惯性矩有关,这里EI有个专业术语,叫做 抗弯刚度。
二、软件的简单介绍及其使用
1、材料力学分析软件
我们现在所使用的材料力学分析软件 是MDSolids MDSolids系列的,该软件所能计算的对 系列的,该软件所能计算的对 列 件 计算 对 象主要是简支梁以及超静定悬臂梁。
下面 进行操作演示。
2 结构力学分析软件 2.结构力学分析软件 2.
结构力学分析软件我们所使用的是清华 大学所研发的一款分析软件,该软件功能 计算 种平 简支 强大,可计算各种平面结构,包括简支梁, 连续梁,以及平面桁架等等的静定及超静 定结构,但是缺点是不方便进行计算书截 定结构 但是缺点是不方便进行计算书截 图。
下面进行操作演示。
3.理正工具箱 3. 理正工具箱
对于理正工具箱,我们所用到的主要 是其中的钢连续梁这个模块,顾名思义, 是算连续梁结构的。
该模块运用起来比较 方便 下面进行操作演示 方便,下面进行操作演示。
。