全国大学生机器人搬运比赛部分程序(aw60)
自选题目7-机器人爬杆搬运赛

2016四川省机器人大赛——机器人爬杆搬运赛一、总则(一)竞赛目的本项赛事的目的在于促进机器人技术的普及应用。
参赛队需要在规则范围内以各自组装的机器人在竖杆底部指定区域内自动抓取橡胶球,然后自动爬升到杆顶,并将橡胶球投入杆顶的洞内为成功搬运,机器人可多次上下爬杆搬运,在3分钟时间内搬运球数量多的队伍获胜。
本赛项期望以竞技的形式来推动机器人技术在大学生、青少年中的普及与发展。
(二)竞赛内容概述在平台上启动区位置放置机器人,裁判发令后,机器人通过一键启动后自动运行,在空心竖杆底部指定位置自动抓取橡胶球后自动爬杆,到达杆顶后,将橡胶球投入空心竖杆,机器人可多次上下爬杆搬运,也可一次携带多个橡胶球爬杆,每场比赛3分钟,3分钟后机器人需要自动停止动作,机器人成功搬运橡胶球后,该队得分,每球得2分,得分上不封顶,搬运中如果橡胶球掉到地上则相应扣分,每球扣1分,最终得分多的队伍获胜。
对于由于规则未能描述到的盲区或疑问点导致的争议,在比赛现场应服从主裁判裁决,赛后可由参赛队申请仲裁或解释,由技术委员会合议后进行书面的解释判定,并正式列入规则中。
二、场地和机器人(一)比赛场地1、比赛场地为直径为1200mm的圆形,分为启动区,橡胶球存放区和竖杆三部分,见图1。
2、启动区位于场地的内部,用绿色颜色涂敷,直径1000mm,机器人上场后放置在此区域,启动区中心略高于外侧,材质用厚30mm的高弹性海绵垫加工,详细设计见图2。
3、橡胶球存放区用黄色涂敷,位于场地外围,存放区四周有挡板,挡板高50mm,比赛开始时,存放区橡胶球为30个,球的位置和状态各队伍可在比机器人启动前可自行摆放(不得超出橡胶球存放区),见图1。
4、竖杆为管状,外直径110mm,高3000mm,壁厚3mm,材质为不锈钢管,杆顶为直径200mm圆环,内径为100mm与竖杆内径相通,圆环厚5mm,材质为不锈管,在场地具体位置和形状见图2。
5、每个实心橡胶球直径90mm,重450g,颜色根据实际购买情况而定。
机器人搬运赛竞赛规则-V1.0
* Please note that this is draft version of the rules. It is not the final version therefore, there may have some changes until 2 months before the competition.Transporter机器人搬运赛组别:中学组(A组、B组)、小学组(A组、B组)成员:每组一台机器人,一位参赛队员1. Game DescriptionTransporter is a game that robot transport specified target to assigned goal in IROC official playfield in time. The robot who transports all targets and returns at time closest to given time will win the game.It is essential to understand participant’s own robot fully, dynamics and physical laws about robot, sensor control techniques, and programming in order to construct robot and program it.本项目为轨迹类计时赛,机器人从起点出发,完成指定搬运任务,在指定时间到达终点后停住。
本项目非比谁更快,而是比谁更精准。
机器人不能推、拖目标物,只能将目标物搬里地面并运送。
2. Robot rule2-1. Robot type 机器人类型No restriction 没有特别限制。
2-2. Construction 机器人搭建2-2-1. Built on-site 现场搭建The robots should be built on-site by the participant during the construction time except for the robot controller.机器人应在比赛当场搭建。
第十八届全国大学生机器人大赛ROBOCON总决赛赛制
第十八届全国大学生机器人大赛ROBOCON
总决赛赛制
1. 总决赛分为初赛和复赛两个阶段。
2. 初赛
(1)初赛为分组循环赛。
南、北两赛区晋级赛后晋级的各16支参赛队分为A~H共8组,每组4队。
各赛区的前四名为种子队,其它24支参赛队抽签确定排位,如下表所示:
【注】表中“北”、“南”分别表示北方赛区和南方赛区,数字为在该赛区的名次。
(2)每组内实行循环赛制,比赛6场,对阵表及场序如下表所示:
(3)每场比赛在某一队实现“登顶”或开赛3分钟后立即结束。
(4)每场比赛获胜队积分为1;失利队积分为0;没有平局。
(5)初赛结束后按下顺序排队组内名次:
①先按积分排名,积分高的队在先;
②如果两队积分相同,则三场中实现“登顶”次数多的队排列在先;
③如果仍然持平,则三场总分高的队在先;
④如果仍然持平,则三场机器人总重轻的队在先。
(6)各组前两名晋级复赛。
4. 复赛
(1)复赛为淘汰赛。
淘汰赛采用三局两胜制,最先获得两局胜利的参赛队晋级。
(2)每场比赛在满足结束条件后立即结束。
(3)根据分组循环赛后的排名成绩,各组排名1、2位的参赛队出线,取得复赛的资格。
复赛按上图对阵,图中A1为A组第一名,A2为A组第二名,余
类推。
(4)对阵表中,红框中的参赛队为红队,蓝框中的参赛队为蓝队。
(5)颁奖仪式前的比赛为八进四、半决赛和决赛。
智能制造-自动搬运分拣机器人比赛方案 精品

场地的照明要求:赛场的照度为600Lux到1200Lux之间,场地上各区域的照度应柔和均匀,各区域照度差不超过300Lux.实际的比赛场地四角会架设各2座20W、色温4000~6000K的节能灯,光源高度为2米。
规则
比赛场地为正方形,规定如下:
RC1.1尺寸
边长为1600mm(不含安全边界),公司提供的场地表面材料为1500mm*1600mm的长方形。
比赛规则
规则一
智能搬运机器人规定
RC-1.0场地
E
D
C
B
A
RC-1.1.1材质及表面要求
场地的材质为木质,场地表面最大承重能力100kg,各参赛队可自行制作,或者直接在采用比较平整的地面即可。场地表面的材料为亚光PVC膜,各种颜色和线条用计算机彩色喷绘的形式产生。参赛队可以从技术委员会指定的厂家购买场地表面材料。
20XX年江苏省/全国机器人大赛 比赛项目
搬运分拣机器人比赛方案
比赛简介
比赛目的
设计一个基于8位单片机或ARM控制的小型机器人,在比赛场地里移动,将不同颜色、形状或者材质的物体分类搬运到不同的对应位置。比赛的记分根据机器人将物体放置的位置精度和完成时间来决定分值的高低。它模拟了工业自动化过程中自动化物流系统实际工作过程。
RC1.2.7 场地外安全边界
场地周围0.5米处有高400mm、厚10mm的方形白色木质围栏,外形尺寸为:2600毫米×2600毫米。
比赛开始后,白色围栏内不得有人活动。
详细如图1和图2:
图1 场地立体示意图
图2 场地平面示意图(带安全边界)
机器人出发区:绿色边界为180mm×180mm,中间黑色线宽20mm,两边线宽10毫米,间距均为28mm,居中布局。
运输机器人对抗赛·规则文档

第四届浙江省大学生机器人竞赛运输机器人对抗赛·规则文档1. 比赛任务简介比赛场地上有很多货物——8个黄色的方砖(每个1分)和5个绿色的方砖(每个3分)。
红蓝两队的机器人将同时从本队的“启动区”出发,并在4分钟的比赛时间内,将场上的方砖运送到与本队颜色相同的“收集区”中。
比赛结束时,根据场上各队“收集区”中的方砖计算比分。
场地上有一块与本队颜色相同的“双倍砖”。
比赛结束时,如果“双倍砖”在本队“扇形收集区”内,此队的得分将会翻倍。
2. 比赛场地说明(尺寸单位mm)运输机器人对抗赛比赛场地示意图比赛场地为木制,大小为4000×3200,周边有高100、厚15的围栏。
场地正中心放置一个外径640的圆形转桌(桌面可在外力作用下旋转),桌厚40,桌下有一高160、直径400的支撑台柱,桌面中心上固定了一个方形围栏,栏厚15、高15,内部方形边长60。
场地两条长边中点位置各卡入一个高200的矮墙,矮墙高200、长445、宽90,矮墙靠近场地中心一端的顶上固定了一个方形围栏,栏厚15、高15,内部方形边长60。
场地和斜坡的地面喷涂了黑色哑光漆,并粘贴了若干宽30的白色引导线(引导线围成的基本方格边长是400)。
各队的启动区和收集区张贴了代表本队颜色的深色哑光广告贴纸。
场地两侧的长方形收集区中间部分与场地黑色地面直接连通,但两侧的正方形收集区都有高30、厚15的围栏保护。
场地的围栏和圆桌的其他部分被喷涂成白色。
方砖的边长是50左右,为木质材料,表面喷涂对应颜色的木工漆或者包裹对应颜色的广告贴纸。
比赛开始前,方砖和圆桌桌面被放置在“运输机器人对抗赛比赛场地示意图”所示的对应位置。
黄色为1分砖,绿色为3分砖,红色为红队双倍砖,蓝色为蓝队双倍砖。
场地的其他尺寸参见“运输机器人对抗赛比赛场地尺寸图”,最终比赛的实际场地允许存在±5的误差。
运输机器人对抗赛比赛场地尺寸图3. 比赛详细流程和规则要求3.1 必须使用由本队队员亲自制作的非遥控自主机器人参赛。
第十五届全国大学生机器人ROBOCON比赛规则(2015.11修订版)

第十五届全国大学生机器人大赛ROBOCON主题与规则清洁能源共青团中央全国学联中央电视台新科动漫频道2015年10月清洁能源0 主题与简介我们在日常生活中处处要用到能量,它们均源于自然。
人类从自然界提取或合成了这些能量。
在所有能量中,化石能源是最便宜且易于使用的。
过去,我们误认为化石能源储量无限而过度消耗了它们。
这种能源消耗习惯现在对我们影响很大。
化石能源难以勘探,现有的化石能源不会维持太久。
为了解决这个问题,我们必须有效地利用现有能源,并同时探索和利用其它清洁和可再生能源,以弥补来自化石的能量。
第十五届全国大学生机器人大赛ROBOCON以“清洁能源”为主题,比赛在图1所示的场地上进行。
图1 比赛场地比赛规则的设计体现了尽可能减少能源消耗和利用清洁、可再生能源的意识。
每支参赛队要制作两台机器人:一台是表现半自主和/或自主控制技术的混合型机器人,另一台是象征节约能源的经济型机器人。
为了方便,以下把它们分别简称为机器人A和机器人B。
机器人B只能从机器人A那里接受能量完成行驶动作,但可以用用自己的能量完成转向动作,以跟踪包含斜坡和山岗、河流和山道上的路径(详见4.2.2)。
机器人A除了向机器人B提供行驶能量外,还需要从机器人B 那里取得风力发电机的螺旋桨,并爬上风机立柱以装配风力发电机。
我们期待着在赛场上见证由年轻的未来工程师们制作的机器人的精彩比赛!1 比赛流程及任务参赛队到达比赛场地后,应按以下顺序完成各项任务。
1.1 机器人的设置1.1.1 比赛开始前,有1分钟的机器人设置时间。
1.1.2 每支参赛队最多有三名队员进行机器人的设置,协助队员不得参与设置。
1.1.3 在一分钟内没有完成设置的参赛队在比赛开始后可以继续进行设置。
1.2 比赛开始时机器人和参赛队员的位置1.2.1 机器人A必须从启动区A1启动。
1.2.2 机器人B必须放在启动区B内,它与地面的所有接触点(面)不得超出启动区B且它的任何部件不得伸到对方场地、场外及其上方。
2019年河南赛区(智能物料搬运机器人)竞赛命题说明及赛项安排(征求意见稿)

第六届全国大学生工程训练综合能力竞赛河南赛区竞赛命题说明及赛项安排(“智能物料搬运机器人”竞赛)(征求意见稿)根据第六届全国大学生工程训练综合能力竞赛组委会竞赛命题和赛项安排说明,河南赛区组委会决定2019年河南赛区竞赛命题与第六届全国大学生工程训练综合能力竞赛命题基本保持一致。
1.竞赛命题本项竞赛题目为“智能物料搬运机器人竞赛”。
自主设计并制作一款能执行物料搬运任务的智能移动机器人。
该机器人能够在规定场地内自主行走,通过扫描阅读二维码领取任务,自主寻找、识别任务指定的物料,按任务要求的顺序将其搬运至指定的存放地点,并按照要求的位置和方向摆放。
根据现场抽签决定抓取物料的类型,现场设计机器人末端抓取装置(手爪),使用 3D 打印设备完成制造,安装于参赛机器人手臂末端后进行现场运行比赛。
本项目参赛所要求的实物和文件均由参赛学生自主完成。
2.题目要求2.1 参赛机器人的功能要求应具有场地目标位置识别、自主路径规划、自主移动、二维码读取、物料颜色识别或形状识别、物料抓取和搬运等功能;全部竞赛过程由机器人自主运行,不允许使用遥控等人工交互手段及除机器人本体之外的任何辅助装置。
2.2 参赛机器人的电控及驱动主控电路采用嵌入式解决方案(包括嵌入式微控制器等),实现二维码读取、自主定位、物料识别、以及路径规划及运动控制等功能,所用传感器和电机的种类及数量不限。
自行设计制作主控电路板,其上须带有电机驱动电路及任务内容显示装置,该显示装置能够持续显示二维码任务信息直至比赛结束。
机器人驱动电源供电电压限制在12V以下(含12V),电池随车装载,场内赛程中不能更换。
2.3 参赛机器人的机械结构要求自主设计并制造机器人的机械部分,该部分允许采用标准紧固件、标准结构零件及各类商品轴承。
机器人的行走方式、机械手臂的结构形式均不限制。
机器人腕部与末端抓取装置(手爪)的连接界面结构自行确定。
除末端抓取装置(手爪)在竞赛现场设计制作外,其他均在校内完成,所用材料自定。
机器人搬运赛比赛规则
机器人搬运比赛规则一、比赛主题:“机器人搬运”任务主要模拟运输队伍的活动项目。
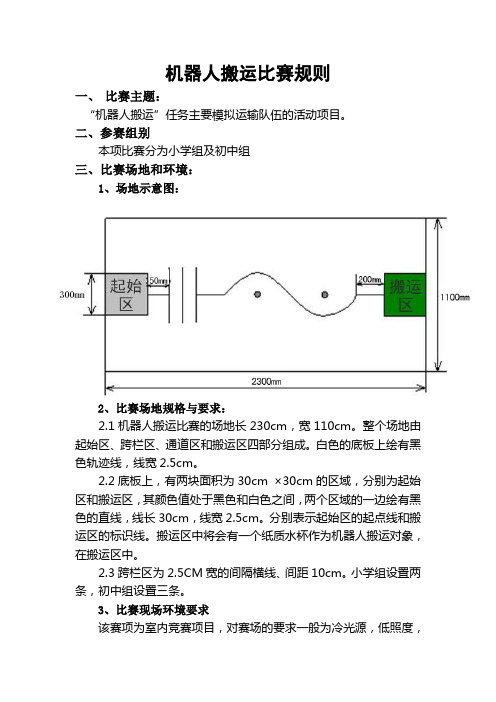
二、参赛组别本项比赛分为小学组及初中组三、比赛场地和环境:1、场地示意图:2、比赛场地规格与要求:2.1机器人搬运比赛的场地长230cm,宽110cm。
整个场地由起始区、跨栏区、通道区和搬运区四部分组成。
白色的底板上绘有黑色轨迹线,线宽2.5cm。
2.2底板上,有两块面积为30cm ×30cm的区域,分别为起始区和搬运区,其颜色值处于黑色和白色之间,两个区域的一边绘有黑色的直线,线长30cm,线宽2.5cm。
分别表示起始区的起点线和搬运区的标识线。
搬运区中将会有一个纸质水杯作为机器人搬运对象,在搬运区中。
2.3跨栏区为2.5CM宽的间隔横线、间距10cm。
小学组设置两条,初中组设置三条。
3、比赛现场环境要求该赛项为室内竞赛项目,对赛场的要求一般为冷光源,低照度,无磁场干扰,但也不排除有外部的各种干扰。
建议各参赛队要做好防干扰的各种准备,按规定做好热身及环境因素的测定。
四、机器人设计与器材要求:1、本比赛项目的机器人套装或散件不做任何限定。
2、机器人最大原始尺寸:长30cm,宽25cm,高不限。
3、每个参赛队比赛时将使用一个机器人去完成任务,机器人限定使用1个可编程处理器;马达数量不超过4个;传感器不超过3个;其它用于结构搭建的材料不限;机器人部件之间的衔接可以使用胶水、螺丝钉等材料进行固定。
4、各参赛队必须对参赛机器人进行个性化设计,机身上要有明显的本队标志。
5、各代表队须自备竞赛所需的机器人套装器材,并带齐常用工具、电源接线板、转换插头等。
如各代表队有手提电脑推荐自带。
五、比赛任务说明1、评定标准:记录机器人完成全部任务的时间。
机器人如果在搬运赛过程中脱离轨迹运行,则为任务失败,不再记录当次比赛成绩。
2、成绩记录:两轮比赛以完成任务时间最短的一次作为参赛队伍的比赛最终成绩。
3、任务分值:机器人从起始区出发,穿过跨栏区,进入通道区,然后进入搬运区,把搬运区的搬运物再从搬运区搬运到起始区的为完成全部总体任务,从起始区出发到跨过跨栏区得15分,顺利通过通道区到达搬运区得到15分,成功搬起物体得10分,成功把搬运物运回到起始区得40分,总体任务的时间得分20分,只有顺利完成全部任务的方可得到相应的时间得分。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
全国大学生机器人搬运比赛部分程序(aw60)图1比赛场地示意图图2机器人出发区示意图4//-------------------------------------------------------------------------*//机器人搬运比赛程序如下:// 项目名: 基于Freescale AW60的*// 硬件连接: * // 程序描述: 定时器2作为颜色传感器计数器;定时器1通道0-1作为PWM输出;通道2作为颜色传感器的定时器溢出中断// 超声波计数用定时器 1 *// 说明: *// ? *// *// 作者信息? *// 版本信息? *// 完成时间? *// 修订记录:*// 时间:*// 内容:? * //-------------------------------------------------------------------------*//调用头文件#include "Includes.h"void main(void){//定义变量,不管在主程序还是子函数,都需要把变量的定义放在最前面,否则会报错int D=0;int m=0;char num1=0; //用于计数用char num2=0; //用于转弯计数用char flag_forward=1; //前进的标志位char flag_backward=1; //后退的标志位//用到的端口,一定要记得初始化端口数据方向寄存器//液晶模块//PTGDD |= 0b00011111; //液晶模块IO 的输入输出配置//颜色传感器模块//PTCDD |= 0b00101100; //配置颜色传感器模块// PTFDD &= 0b11111110;//红外传感器模块及驱动模块PTDDD = 0b00000111; // PTDD4作为定时器2的外部时钟输入PTBDD = 0b01000000; //前五个是红外传感器,最后两个是超声波的发送和接收PTEDD |= 0b11111100; //配置驱动模块//PTEDD &= 0b11111110; //配置红外接近传感器PTADD = 0xFF; //PTFDD = 0b00111111; //前两个口左右计数的口//2 关总中断DisableInterrupt();//禁止总中断//3 芯片初始化MCUInit();//4 模块初始化PWM_Init(1,0x0fa0); //用作PWM输出控制电机周期最佳控制大概400ms左右(控制舵机用TPM_NUM_1,CH_2)//TPMinit(2); //用来作为颜色传感器的计数用外部时钟/*rb=0;//值的初始化bb=0;//值的初始化gb=0;//值的初始化ryz=0;//值的初始化byz=0;//值的初始化gyz=0;//值的初始化flag=0;//值的初始化*/num_black=0;num_left=0;num_right=0;D=60;// baipingheng();// EnableInterrupt(); ////开总中断*/while (1){//-------------------------------------------------------------------------*//文件名: 无*//说明: 完成直推三个目标*//作者:*//初始时间:*//修订记录:*//备注:程序顺序执行一遍就走完了全程,回到出发区*//-------------------------------------------------------------------------*/*while(num_black<2)num_black= black_num(0);xunji_forward_3();}if(num_black==2){stop(0);DelayMs(100);while(num_right<=1){num_right= black_num(1);xunji_forward_3();}stop(0);//到达目的地num_right=0;num_black=0;flag_backward==0;//作为后退的准备while(flag_backward==0)//后退到赛道中心的程序{back_faward();DelayMs(1000);//等待黑线的过去if(COUNT_RIGHT==1){flag_backward=1;}}turn_left(2);//左转90角度.推第二个目标while(flag_forward==0){xunji_forward_3();if(COUNT_RIGHT==1){flag_forward=1; //直推完成flag_backward=0; //开始后退的旅程}}while(flag_backward==0){back_faward();if(COUNT_RIGHT==1){flag_backward=1;}}middle_faward(70);DelayMs(100); //避免再碰到黑线stop(0);DelayMs(2); //减缓电机的抖动Eleft(70);while(num_left<=3)//左转180度推第三个目标{num_left=black_num(1);}if(num_left==3){num_left=0;num_black=0; //黑线数清零?}DelayMs(10);while(flag_forward==0){xunji_forward_3();if(COUNT_RIGHT==1){flag_forward=1; //直推完成flag_backward=0; //开始后退的旅程}while(flag_backward==0) {back_faward();if(COUNT_RIGHT==1){flag_backward=1;}}turn_left(3);back_faward();while(num_black<2)num_black= black_num(0); back_faward();DelayMs(1000);*///-------------------------------------------------------------------------*//文件名: 无*//说明: 直走90度弯的程序*//作者:*//初始时间:*//修订记录:*//备注:在碰到第二根黑线之前程序要循环扫描,执行完程序就刚转90度弯,推物块到目的地,然后返回到中心停住的程序*//-------------------------------------------------------------------------*/*black_num(0);if(num_black==2){turn_left(4);num_black=0; //黑线数清零?flag_forward=0; //为直推做好准备,必须写的程序}else xunji_forward_3();}while(flag_forward==0){xunji_forward_3();if(COUNT_RIGHT==1){flag_forward=1; //直推完成flag_backward=0; //开始后退的旅程}}while(flag_backward==0){back_faward();if(COUNT_RIGHT==1){flag_backward=1;while(1);}}*///-------------------------------------------------------------------------*//文件名: 无*//说明: 直走90度弯的程序*//作者:*//初始时间:*//修订记录:*//备注:在碰到第二根黑线之前程序要循环扫描,执行完程序就刚转90度弯而已,后面num1是被清零的,所以还是在执行循迹*//-------------------------------------------------------------------------*/*if(sensor_inp_forward()==0x1f)num1++;while(sensor_inp_forward()==0x1f);if(num1==2){Eleft(70);while(num2<4){if(num_right==1)num2++;//DelayMs(1000);while(num_right==1);}num1=0;//DelayMs(3000);}else xunji_forward_3();*///-------------------------------------------------------------------------*//文件名: Robot_Run.c *//说明: 双足机器人运动函数文件*//作者:*//初始时间:*//修订记录:*//备注:*//-------------------------------------------------------------------------*#include "Robot_Run.h"//不同的车,因为电机接线不一样,对应的这些设置也会有变动,最好自己先测试这几个最基本的动作uint8 flag_black=0,flag_right=0,flag_left=0;//车前的传感器uint8 sensor_inp_forward(){unsigned char sensor_forward;sensor_forward=PTBD;sensor_forward&=0x1F;return sensor_forward;}//车后的传感器uint8 sensor_inp_backward(){unsigned char sensor_backward;sensor_backward=PTDD;sensor_backward&=0x07;return sensor_backward;}//此段为前进程序启动void middle_faward(uint8 speed){PWM_Set(TPM_NUM_2, TPM1_CH_0 , speed);PWM_Set(TPM_NUM_2, TPM1_CH_1 , speed+4);//已经调整好的参数占空比百分之78IN1=1;IN2=0;IN3=1;IN4=0;DelayMs(2); //设置PWM设置的时间间隔}//此段为旋转左转程序程序启动void left(uint8 speed){PWM_Set(TPM_NUM_2, TPM1_CH_0 , speed-40);PWM_Set(TPM_NUM_2, TPM1_CH_1 , speed);IN1=1;IN2=0;IN3=1;IN4=0;DelayMs(2);}//此段为旋转大左转程序程序启动void Eleft(uint8 speed){PWM_Set(TPM_NUM_2, TPM1_CH_0 , speed);PWM_Set(TPM_NUM_2, TPM1_CH_1 , speed-20);IN1=1;IN2=0;IN3=0;IN4=1;DelayMs(2);}//此段为旋转右转启动程序void right(uint8 speed){PWM_Set(TPM_NUM_2, TPM1_CH_0 , speed);PWM_Set(TPM_NUM_2, TPM1_CH_1 , speed);IN1=1;IN2=0;IN3=1;IN4=0;DelayMs(2);}//此段为旋转大右转启动程序void Eright(uint8 speed){PWM_Set(TPM_NUM_2, TPM1_CH_0 , speed);PWM_Set(TPM_NUM_2, TPM1_CH_1 , speed);IN1=0;IN2=1;IN3=1;IN4=0;DelayMs(2);}//此段为后退直走序程序启动void back_faward(uint8 speed){PWM_Set(TPM_NUM_2, TPM1_CH_0 , speed);PWM_Set(TPM_NUM_2, TPM1_CH_1 , speed+4);//已经调整好的参数占空比百分之78IN1=0;IN2=1;IN3=0;IN4=1;DelayMs(2);}//此段为旋转左转程序程序启动void backleft(uint8 speed){PWM_Set(TPM_NUM_2, TPM1_CH_0 , speed-40);PWM_Set(TPM_NUM_2, TPM1_CH_1 , speed);IN1=0;IN2=1;IN3=0;IN4=1;DelayMs(2);}//此段为旋转大左转程序程序启动void backEleft(uint8 speed){PWM_Set(TPM_NUM_2, TPM1_CH_0 , speed);PWM_Set(TPM_NUM_2, TPM1_CH_1 , speed);IN1=0;IN2=1;IN3=1;IN4=0;DelayMs(2);}//此段为旋转右转启动程序void backright(uint8 speed){PWM_Set(TPM_NUM_2, TPM1_CH_0 , speed);PWM_Set(TPM_NUM_2, TPM1_CH_1 , speed);IN1=0;IN2=1;IN3=0;IN4=1;DelayMs(2);}//此段为旋转大右转启动程序void backEright(uint8 speed){PWM_Set(TPM_NUM_2, TPM1_CH_0 , speed);PWM_Set(TPM_NUM_2, TPM1_CH_1 , speed);IN1=1;IN2=0;IN3=0;IN4=1;DelayMs(2);}//此段为停止启动程序void stop(uint8 speed){PWM_Set(TPM_NUM_2, TPM1_CH_0 , speed);PWM_Set(TPM_NUM_2, TPM1_CH_1 , speed);IN1=0;IN2=0;IN3=0;IN4=0;DelayMs(2);}//-------------------------------------------------------------------------*//函数名: xunji_backward_3 *//功能: 后退五路循迹//参数: 无*//返回: 无*//说明: 1、执行该循迹程序时在不断地设置定时器PWM模块;// 2、使用时要注意一定要每隔一段时间执行此程序一次(两者是缺一不可的),才能达到循迹的功能。