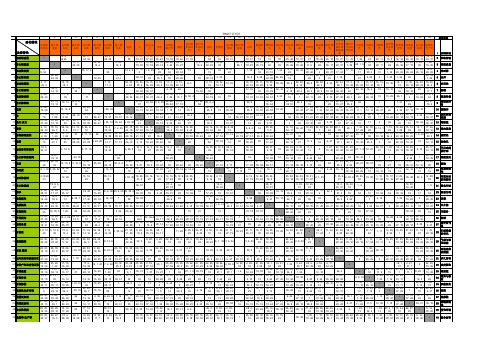
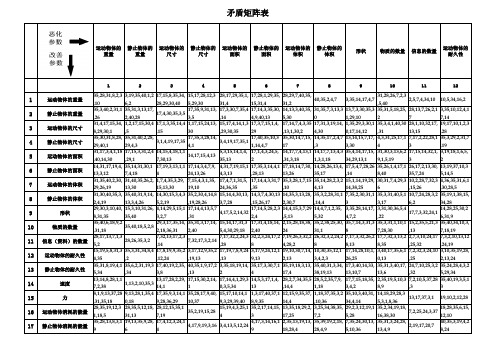
矛盾矩阵表
TRIZ矛盾矩阵
1, 15, 17, 24
17, 15
2, 32, 10
1, 18
2, 32
22, 33, 17, 2, 28, 1 18, 39
2, 29, 27, 2, 22, 1,
18, 36 39, 35 40
25, 28, 22, 21, 17, 2,
2, 16 27, 35 40, 1
35, 10, 34, 39, 30, 18,
14, 4, 15, 22
7, 2, 35
35, 15, 34, 18
35, 10, 37, 40
26, 39, 13, 15, 1, 40 1, 28
37 2, 11, 13 39
28, 10, 34, 28, 33, 15, 10, 35, 19, 39 35, 40 28, 18 21, 16
18, 31 19
31
35 20, 28 18, 31 27 35, 26
15, 19, 18, 19, 5, 8, 13, 10, 15, 10, 20, 19, 6, 10, 28, 18, 26,
18, 22 28, 15 30
35 35, 26 18, 26 8, 3
28
1, 35
7, 2, 35, 4, 29, 39 23, 10
8, 1 13, 12 28, 27
15, 37, 1, 28, 3, 15, 1,
18, 1 25
11
1, 35, 16
11
2
1, 32, 17, 28
32, 15, 26
2, 13, 1
35, 19
32, 35, 30
2, 35, 10, 16
11, 3, 32, 40, 27, 11,
triz矛盾矩阵表原理

triz矛盾矩阵表原理TRIZ矛盾矩阵:创新解码器,挑战与机遇的奇妙碰撞在创新的海洋里遨游,我们常常遭遇各式各样的问题瓶颈,仿佛站在科技树的一个棘手节点,进退维谷。
此时,一种名为“TRIZ”的强大工具——矛盾矩阵表便犹如神秘的航海图,以其独特且富有创意的方式引导我们破浪前行,揭示出问题解决的新路径。
TRIZ(发明问题解决理论)的核心之一便是这个矛盾矩阵表,它可不是寻常的表格那么简单,而是由俄国发明家阿利赫舒列尔精心研发的一套系统化创新方法论。
就如同武侠小说中的武学秘籍,矛盾矩阵表以其独特的矛盾对立体和40个发明原理,为我们在设计、研发乃至生活中的种种难题提供了破解之道。
矛盾矩阵表,顾名思义,其核心在于识别并解决技术系统的矛盾。
当我们的创新之旅遇到“鱼与熊掌不可兼得”的困境时,比如想要提高产品质量却又想降低成本,或者希望产品更小巧但性能却要求提升,这些看似无法调和的矛盾就是矩阵表大展身手的地方。
在这个神奇的矩阵中,矛盾被分为39种功能对立和1种物理矛盾,每一对矛盾都对应着一套针对性的创新原理。
如同侦探解开谜团一般,工程师们只需将问题对立项定位到矩阵中,就能找到一系列可能的解决方案。
这就是TRIZ矛盾矩阵的独门秘诀,既直观又高效,让你忍不住惊叹:“哇塞!原来还可以这样解决问题!”矛盾矩阵的魅力不仅体现在它的实用性上,更在于它激发创新思维的独特方式。
它鼓励我们打破常规思维框架,从新的视角审视旧问题,让那些看似无解的僵局瞬间变得柳暗花明。
这就像是一位智慧的老者,以平易近人的口吻,通过生动的案例,教诲我们如何举一反三,触类旁通。
总而言之,在创新探索的路上,TRIZ矛盾矩阵就像是一个充满魔力的指南针,引领我们在问题丛林中披荆斩棘,不断挖掘潜在的可能性。
每一次成功应用,都是人类智慧与科技力量的巧妙结合,也是挑战与机遇的一次奇妙碰撞。
让我们手握矛盾矩阵这张创新解码器,勇往直前,共同绘制科技创新的美好蓝图吧!。
Triz(发明问题解决)理论及矛盾矩阵表
Altshuller 研究了超过1,500,000世界级的专利,发现了39个标准技术特性能引
起冲突。它们被称作39个工程参数见表二 ,查找矛盾的工程方法是先找变化的参数, 再找引起不需要的参数。 实例:要使饮料罐的壁厚减小的工程参数是“#3 移动物体的长度“,在TRIZ里,标 准工程参数的含义是非常多样的,在这里“长度”可以指任何线性的尺寸,如长度、 宽度、高度,直径等。若我们减小壁厚就会引起罐体承载力的减小,这个工程参数 就是“#14,强度”,那么标准的技术冲突就是:我们要减小“移动物体的长度” 就会引起“强度”的降低。
计算机鼠标用一个球体来传输X和Y两个轴方向的运动。 利用发明原则14 a., 与罐体焊在一起的唇口原来是垂直于侧壁的,现在变成带一个 弧度。如下图
发明原则 #35 改变物体的物理和化学状态 改变物体的集合状态、密度分度、灵活度、温度
采用强度更高的的金属合材料来增加饮料罐的承载能力。 在不到一周时间内,该发明人Jim Kowalik 就为美国软饮料工业提出了超过二十个 有用的解决方案,其中有几个便被采纳了。
表二 39个工程参数 1. 移动物体的重量 2. 静止物体的重量 3. 移动物体的长度 4. 静止物体的长度 5. 移动物体的面积 6. 静止物体的面积 7. 移动物体的体积 8. 静止物体的体积 9. 速度 10. 力 11. 张力,压力 12. 外形 13. 物体的稳定性 14. 强度 15. 移动物体的耐久性 16. 静止物体的耐久性 17. 温度 18. 光亮度 19. 移动物体消耗的能量 20. 静止物体消耗的能量 21. 动力 22. 能量损失 23. 物质损失 24. 信息损失 25. 时间损失 26. 物质总和 27. 可靠性 28. 测量精度 29. 制造精度 30. 作用物体的有害因素 31. 有害面效果 32. 可制造性
TRIZ 矛盾矩阵表简介课件完整版资料

48个通用工程参数解释
有害的散发 增加的9个通用工程参数
2003年矛盾矩阵表是由美国科技人员在引入TRIZ理论基础上,对1500万 信息的数量:一种(附属)系统的信息资源(资料)的数量。
兼容性/可连通性 信息的数量:一种(附属)系统的信息资源(资料)的数量。
2003年矛盾矩阵表是由美国科技人员在引入TRIZ理论基础上,对1500万
安全性 移动物体的面积:面积是指物体内部或外部的任意二维尺寸。
静止物体的长度:长度是指静止物体的任意线性尺寸,如长、宽、高、角度 移动物体的面积:面积是指物体内部或外部的任意二维尺寸。
易受伤性 2003矛盾矩阵表上不再出现有空格,物理矛盾与技术矛盾的求解同时在矛盾矩阵表中显现,为设计者不仅为解决技术系统的技术矛盾,
1970与2003矛盾矩阵表的比较
• 2003年矛盾矩阵表是由美国科技人员在引入TRIZ理论基础上,对1500万 件专利加以分析、研究、总结、提炼和定义的结果。
• 增加了9个通用工程参数,由39个变为48个; • 2003矛盾矩阵表上不再出现有空格,物理矛盾与技术矛盾的求解同时在
矛盾矩阵表中显现,为设计者不仅为解决技术系统的技术矛盾,同时也为 解决技术系统的物理矛盾提供了有序、快速和高效的方法 • 在2003矛盾矩阵表上提供的通用工程参数矩阵关系由1263个提高到2304 个,同时,在每一个矩阵关系中所提供的发明原理个数也有所增加,致使 帮助人们提供了更多的解决发明问题的方法,更加高速、有效、大幅度提 高创新的成功率。 • 注意:1970与2003矛盾矩阵表上的显示技术特性的通用工程参数编码是 不同的,使用时应注意分别对照使用,不宜混搅。 • 新增加的37个发明原理,尚未列入2003矛盾矩阵表中,有待进一步研究 完善。
TTRIZ矛盾矩阵表

TTRIZ矛盾矩阵表
39项技术参数
01、运动物体的重量 15、运动物体作用时间 29、制造精度 02、静止物体的重量 16、静止物体作用时间 30、物体外部有害因素作用的敏感性 03、运动物体的长度 17、温度 31、物体产生的有害因素 04、静止物体的长度 18、光照度32、可制造性 05、运动物体的面积 19、运动物体的能量 33、可操作性 06、静止物体的面积 20、静止物体的能量 34、可维修性 07、运动物体的体积 21、功率35、适应性及多用性 08、静止物体的体积 22、能量损失 36、装置的复杂性 09、速度 23、物质损失 37、监控与测试的困难程度 10、力 24、信息损失 38、自动化程度 11、应力或压力 25、时间损失 39、生产率 12、形状 26、物质或事物的数量
13、结构的稳定性 27、可靠性
14、强度 28、测试精度。
技术创新方法(TRIZ)研发技术用矛盾矩阵表

02,28 9 速度 13,38 08,01 10 力 37,18 10,36 11 应力、压强 37,40 08,10 12 形状 29,40 21,35 13 稳定性 02,39 01,08 14 强度 40,15 运动物体的作用时 18,05 15 间 34,31 静止物体的作用时 16 间 36,22 17 温度 06,38 19,01 18 照度 32 运动物体的能量消 12,18 19 耗 28,31 静止物体的能量消 20 耗 08,36 21 功率 38,31 15,06 22 能量损失 19,28 35,06 23 物质损失 23,40 10,24 24 信息损失 35 10,20 25 时间损失 37,35 35,06 26 物质的量 18,31 03,08 27 可靠性 10,40 32,35 28 测试精度 26,28 28,32 29 制造精度 13,18 作用于物体的有害 22,21 30 因素 27,39 物体产生的有害因 19,22 31 素 15,39 28,29 32 可制造性 15,16 25,02 33 操作流程的方便性 13,15 02,27 34 可维修性 35,11 01,06 35 适应性、通用性 15,08 26,30 36 系统的复杂性 34,36 控制与测量的复杂 27,26 37 性 28,13 28,26 38 自动化程度 18,35 35,26 39 生产率 24,37
02,08 08,10 10,36 15,38 18,37 37,40 08,10 13,29 19,35 10,18 13,04 17,10 01,18 08 04 35 01,14 28,10 35 29,30 19,30 10,35 04,34 35,02 36,28 01,18 10,15 35,36 36,37 29,04 15,35 06,35 38,34 36,37 36,37 02,18 24,35 37 13,28 06,18 15,19 36,40 13,28 18,21 15,12 11 06,35 36,35 36 21 35,15 35,10 34,15 34,18 37,40 10,14 33,15 10,35 02,35 28,18 21,16 40 08,13 10,18 10,03 26,14 03,14 18,40 03,35 19,02 19,03 05 16 27
TRIZ-2003矛盾矩阵表(重新整理)
4,17,9,19,3,16 3,4,13,5,12,24
2,19,17,20,7
40,35,3,19,4,2
9
6
4
9
18,28,4
28,4,9
5,10,36
13,4,9
8,24
矛盾矩阵表
静止物体的 耐久性
速度
力
运动物体消 静止物体消 耗的能量 耗的能量
功率
张力/压力
强度
结构的稳定 性
温度
明亮度
运行效率
8,29,30,1 ,5
,15
30
,29,30,35 29
,13,1,30,2 4,30
0,17,14,12 ,31
13,15
,28
4
静止物体的尺寸
35,30,31,8,28, 35,31,40,2,28,
17,35,3,28,14,
17,40,35,10,3 35,30,14,7,15, 14,35,17,2,4,7 13,14,15,7,17, 4,3,31,25,17,1 7,17,2,22,28,1 35,3,29,2,31,7
矛盾矩阵表
运动物体的 静止物体的 运动物体的 静止物体的 运动物体的 静止物体的 运动物体的 静止物体的
重量
重量
尺寸
尺寸
面积
面积
体积
体积
形状
物质的数量
信息的数量
运动物体的 耐久性
1
2
3
4
5
6
7
8
9
10
11
12
1
运动物体的重量
35,28,31,8,2,3 3,19,35,40,1,2 17,15,8,35,34, 15,17,28,12,3 28,17,29,35,1, 17,28,1,29,35, 28,29,7,40,35,
阿奇舒勒矛盾矩阵表及40个发明原理

阿奇舒勒矛盾矩阵表40个发明原理1 分割1)火车车厢之间是单独的个体,可调整车厢的数量2)圆珠笔的笔心与笔套是两个可分的部分,笔心可以换3)电风扇的三片叶片是三个独立的个体,可拆卸4)田地里的浇水水管系统,每一段用一个接头连接。
5)自行车、摩托车等的链条是一环一环相接的,每环都是可以取下来的2 分离1)石油加工中,将一些油渣或其他有害物质提炼分离,已获得精度较高的汽油或柴油。
2)子弹发出后,弹芯与弹壳分离3)电脑键盘与鼠标分开,为的是方便人们跟好的操作4)火箭在冲出大气层的过程中将已经燃完燃料的部分解体分离5)现在用在建筑中的隔音材料将噪音吸收或隔离,从而使噪音被分离出我们所处的环境3 局部质量1)锤子的一边做成平的一边做成扁的,增加了锤子的切削功能(采石场专用锤)。
2)自动笔。
将笔心上作一对耳朵,再加一根弹簧。
3)电钻的钻头作成螺旋状,增加了打孔时的稳定性,防止打滑4)三键模式的电脑鼠标,改变了原先单键的麻烦与不便。
5)改变杯子的开口,在上面做一个切口,可以最大程度的防止在倒水时泄漏(暖瓶外皮的口也是这样的)4 不对称1)衣服上的拉链,一边又拉头另一边没有。
2)电风扇的叶片3)有天线的手机不对称4)大刀从侧面来看是不对称的5)眼镜的两个镜片因人眼近视程度不同,镜片度数不同5 合并1)将火车每个车厢合并在一起,增加载客。
2)电话的话筒与听筒合并在一个盒子里,可以方便人们打电话时可以腾出一只手来干别的事情。
3)农场里喂养牲畜的食槽连在一起,可以节省喂食的时间,提高效率。
4)将室内的多个等串联在一起,共用一个开关。
5)凳子上加一个靠背,两者合并成为椅子6 多用性1)键盘可以用来打字,也可以用来打游戏。
2)多功能手机3)瑞士军刀(最多的功能可到五十多种)4) mp3既可以听歌,也可以存储资料.5) 现在的打印机集打印复印于一体7 套装1)墨水、笔心、笔套套在一起2)电视机的室内天线3) 雨伞的伞柄4)保温杯、暖瓶也是套装原理制成的5)消防车和起重机8 质量补偿1)气垫船,内充空气,使船漂浮。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1, 8, 10, 29
1, 8, 15, 34
8, 35, 29, 34
19
-
10, 15, 19
32
8, 35, 24
-
1, 35
7, 2, 4, 29, 35, 39 23, 10
1, 24
15, 2, 29
29, 35
10, 14, 29, 40
28, 32, 4
10, 28, 29, 37
28
3
10
1, 18
-
15, 17, 27
2, 25
3
1, 35 1, 26 26
-
30, 14, 7, 26
2, 17, 29, 4
-
14, 15, 18, 4
-
+
-
7, 14, 17, 4
-
29, 30, 19, 30, 10, 15, 5, 34, 11, 2, 3, 15, 4, 34 35, 2 36, 28 29, 4 13, 39 40, 14
1
2
3
4
5
6
7
8
运动物 静止物 运动物 静止物 运动物 静止物 运动物 静止物
体的重 体的重 体的长 体的长 体的面 体的面 体的体 体的体
量
量
度
度
积
积
积
积
9 速度
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
力 应力, 形状 稳定性 强度 运动物 静止物 温度 照度 运动物 静止物 功率 能量损 物质损 信息损 时间损 物质的 可靠性 测量精 制造精 作用于 物体产 可制造 操作流 可维修 适应 系统的 控制和 自动化 生产率
1, 15, 17, 24
17, 15
1, 29, 17
15, 29, 35, 4
1, 28, 10
14, 15, 1, 19, 1, 16 26, 24
35, 1, 17, 24, 14, 4, 26, 24 26, 16 28, 29
-
35, 28, 40, 29
-
+
-
17, 7, 10, 40
-
+
-
10, 1, 29, 35
-
35, 30, 13, 2
-
5, 35, 14, 2
-
8, 10, 13, 29, 13, 10, 26, 39, 28, 2, 19, 35 10, 18 29, 14 1, 40 10, 27
-
2, 27, 28, 19, 35, 19, 19, 6 32, 22 32
15, 17, 15, 13, 13, 16 10, 1
15, 30
14, 1, 13
2, 36, 14, 30, 10, 26, 26, 18 28, 23 34, 2
-
18, 19, 15, 19, 18, 19, 5, 8, 28, 1 18, 22 28, 15 13, 30
10, 15, 10, 20, 19, 6, 10, 28, 18, 26, 10, 1, 35 35, 26 18, 26 8, 3 28 35, 17
2, 19, 22, 37
35, 22, 1, 39
28, 1, 9
6, 13, 1, 32
2, 27, 28, 11
19, 15, 29
1, 10, 25, 28, 26, 39 17, 15
2, 26, 35
1, 28, 15, 35
8, 15,பைடு நூலகம்29, 34
-
+
-
15, 17, 4
-
7, 17, 4, 35
-
13, 4, 8
17, 10, 4
1, 8, 35
-
35, 8, 2,14
-
28, 10
1, 14, 35
13, 14, 39, 37, 15, 14, 15, 7 35 28, 26
-
1, 40, 35
3, 35, 38, 18
3, 25
-
-
12, 8
6, 28
10, 28, 24, 35
24, 26,
30, 29, 14
-
15, 29, 32, 28, 2, 32,
压强
体的作 体的作
体的能 体的能
失
失
失
失
量
度
度 物体的 生的有 性 程的方 性 性,通 复杂性 测量的 程度
用时间 用时间
量消耗 量消耗
有害因 害因素
便性
用性
复杂性
素
+
-
15, 8, 29,34
-
29,17, 38, 34
-
29, 2, 40, 28
-
2, 8, 8, 10, 10, 36, 10, 14, 1, 35, 28, 27, 5, 34, 15, 38 18, 37 37, 40 35, 40 19, 39 18, 40 31, 35
矛盾矩阵
恶化的通用工程参数
改 善 的 通 用 工 程 参 数
1 运动物体的重量 2 静止物体的重量 3 运动物体的长度 4 静止物体的长度 5 运动物体的面积 6 静止物体的面积 7 运动物体的体积 8 静止物体的体积 9 速度 10 力 11 应力,压强 12 形状 13 稳定性 14 强度 15 运动物体的作用时间 16 静止物体的作用时间 17 温度 18 照度 19 运动物体的能量消耗 20 静止物体的能量消耗 21 功率 22 能量损失 23 物质损失 24 信息损失 25 时间损失 26 物质的量 27 可靠性 28 测量精度 29 制造精度 30 作用于物体的有害因素 31 物体产生的有害因素 32 可制造性 33 操作流程的方便性 34 可维修性 35 适应性,通用性 36 系统的复杂性 37 控制和测量的复杂性 38 自动化程度 39 生产率
-
6, 29, 19, 1, 35, 12, 4, 38 32 34, 31
-
12, 36, 6, 2, 5, 35, 10, 24, 10, 35, 3, 26, 3, 11, 28, 27, 28, 35, 22, 21, 22, 35, 27, 28, 35, 3, 2, 27, 29, 5, 26, 30, 28, 29, 26, 35 35, 3, 18, 31 34, 19 3, 31 35 20, 28 18, 31 1, 27 35, 26 26, 18 18, 27 31, 39 1, 36 2, 24 28, 11 15, 8 36, 34 26, 32 18, 19 24, 37
6, 3
-
2, 15, 16
15, 32, 19, 13
19, 32
-
19, 10, 32, 18
15, 17, 30, 26
10, 35, 2, 39
30, 26
26, 4
29, 30, 6, 13
29, 9
26, 28, 32, 3
2, 32
22, 33, 28, 1
17, 2, 18, 39
13, 1, 26, 24