弹性力学第四章 平面问题的极坐标解答
第四章平面问题的极坐标解答(讲)

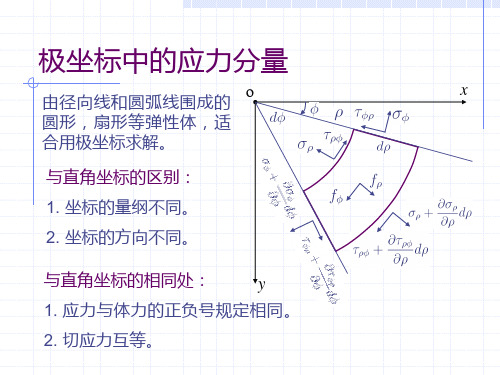
第四章平面问题的极坐标解答§4-1 极坐标中的平衡微分方程对于由径向线和圆弧线围成的圆形、圆环形、楔形、扇形等的弹性体,宜用极坐标求解。
因为用极坐标表示其边界线非常方便,从而使边界条件的表示和方程的求解得到很大的简化。
在极坐标中,平面内任一点P的位置,用径向坐标ρ及环向坐标ϕ来表示,图4-1。
极坐标和直角坐标都是正交坐标系,但两者有如下区别:在直角坐标系中,x和y坐标线都是直线,有固定的方向,x和y坐标的量纲都是L。
在极坐标系中,ρ坐标线(ϕ=常数)和ϕ坐标线(ρ=常数)在不同的点有不同的方向;ρ坐标线是直线,而ϕ坐标线为圆ϕ坐标为量纲一的量。
这些区别将引弦曲线;ρ坐标的量纲是L,而起弹性力学基本方程的差异。
为了表明极坐标中的应力分量,从所考察的薄板或长柱形体中取出任一厚度等于1的微分体PACB,在xy平面上,这个微分体是由两条径向线(夹角为d ϕ)和两条环向线(距离为ρd )所围成,如图所示,沿ρ方向的正应力称为径向正应力,用ρσ代表;沿ϕ方向的正 应力称为环向正应力或切向正应力,用ϕσ代表;切应力用ϕρρϕττ及代表(根据切应力的互等关系,ϕρρϕττ=)。
各应力分量的正负号规定和直角坐标中一样,只是ρ方向代替了x 方向,ϕ方向代替了y 方向。
即正面上的应力以沿正坐标方向为正,负面上的应力以沿负坐标方向为正,反之为负。
图中所示的应力分量都是正的。
径向及环向的体力分量分别用ϕρf f 及代表,以沿正坐标方向为正,反之为负。
与直角坐标中相似,由于应力随坐标ρ的变化,设PB 面上的径向正应力为ρσ,则AC 面上的将为ρρσσρρd ∂∂+;同样,这两个面上的切应力分别为ρϕρϕττ及+ρρσϕd ∂∂。
PA 及BC 两个面上的环向正应力分别为ϕσ及ϕσ+ϕρσϕd ∂∂;这两个面上的切应力分别为ϕϕτττϕρϕρϕρd ∂∂+及。
对于极坐标中所取的微分体,应注意它的两个ρ面PB 及AC 的面积不相同,分别等于()ϕϕρϕρd d d +及;两个ϕ面PA 及BC 的面积都等于d ρ,但此两面不平行。
弹性力学第四章平面问题的极坐标解答
圆环或圆筒受均布压力(1)
q2 q1
边界条件:
圆环或圆筒受均布压力(2)
q2
q1
两个方程三个未知数,不能求解A,B,
C。因此,需引入位移单值条件:
该项必须为零,否则在环上同一点有两 个不同的位移,故B=0
圆环或圆筒受均布压力(3)
பைடு நூலகம்q2
q1 因此,得到圆筒受均匀压力的拉梅 ( me,1795—1870 ,法国)解答:
小孔口问题的特点:
1.集中性,孔附近的应力远大于较远处的应力。
2.局部性,孔口附近的应力扰动主要发生在距孔 边1.5倍孔口尺寸的范围内。在此区域外,由于开 孔引起的应力扰动一般小于5%,可以忽略不计。
注:圆孔的应力集中程度较低,有凹尖角的孔口 应力集中程度较高,因此,在设计结构时应尽量 避免有凹尖角的孔口。
o
x 在仅有径向位移的情况下,段
P P’ A
PA没有转动,因此:
A’
B
C
y
B’
极坐标中的几何方程(5)
— 纯环向位移下的线应变
o
x
很小,导致P’’A’’与PA
P P’’
的差别可以忽略,因此:
A
B B’’
D
D’
A’’
y
极坐标中的几何方程(6)
— 纯环向位移下的切应变
o
x
P
P’’
A
B B’’
D
D’
A’’
阶,因此假定:
半面体在边界上受集中力(2)
F
ao
c
ρ
代入极坐标中的相容方程:
b
得到:
半面体在边界上受集中力(3)
代入:
F
ao
弹性力学 第四章 平面问题的极坐标解答

s = sσ
(3) 多连体中的位移单值条件
§ 4-4 应力分量的坐标变换式
·问题的提出
工程中有些问题, 用极坐标计算方便, 但应力分量用直角坐 标表述更直观. 反之也存在.
由此需要对应力分量进行坐标变换.
§ 4-4 应力分量的坐标变换式
·坐标变换
已知 σx、σy、τxy , 求 σρ、συ、τρυ?
y
fρ τ + ∂τρυdρ ρυ ∂ρ ∂συ dυ συ+ ∂σρ ∂υ σρ+ dρ ∂τυρ C ∂ρ dυ τυρ+ ∂υ
B
fυ
§ 4-1 极坐标中的平衡微分方程
·平衡微分方程
x
υ dυ ρ
Σ Fρ = 0 :
συ
A
σρ τρυ P τυρ
∂σρ σρ+ dρ (ρ+dρ)dυ - σρ ρdυ ∂ρ ∂συ dυ - συ+ dυ dρ sin ∂υ 2 + τυρ+ - συ dρ sin
Σ Fυ = 0 :
συ = ?
§ 4-4 应力分量的坐标变换式
·坐标变换
συ = ?
将两坐标系下微元体组合
τyx σy σx συ
τυρ τxy
§ 4-4 应力分量的坐标变换式
·坐标变换
已知 σx、σy、τxy , 求 σρ、συ、τρυ?
O x
υ
τyx
σy σx
συ y
τυρ τxy
Σ Fυ = 0 :
O h/2 h/2 lqx源自(v)x=0, l = 0
应力边界条件: ( σy ) y=-h/2 = - q (τyx ) y=-h/2 = 0 ( σy ) y= h/2 = 0 (τyx ) y= h/2 = 0
弹性力学:第四章 平面问题的极坐标解答
从原点出发为正, 从 x 轴向 y 轴方向 转动为正。
微分体上的作用力有:
体力-- f ρ , fφ , 以坐标正向为正。 应力-- ρ面, φ面分别表示应力及其 增量。
应力同样以正面正向,负面负向的应力为正,反 之为负 。
平衡条件:
(b)
u u sin v cos。
导数的变换:
将对 x, y 的导数,变换为对 , 的导数:
F (x, y) 可看成是 F (, ),而 , 又是 x, y
的函数,即 F 是通过中间变量 , 为 x, y
的复合函数。
有: F
Φ Φ ρ Φ φ , x ρ x φ x
Φ y
Φ ρ
ρ y
d
2
f ρ ρddρ
0
上式中一阶微量相互抵消,保留到二阶微量,得
1
f
0。
(a)
式( a )中 1、2、4 项与直角坐标的方向相似; 而
σρ
ρ -- 是由于 面ρ面积大于 面的ρ面
积而引起的,
σφ ρ
-- 是由于 面上的
在C点的
向有 投影。
Fφ 0 --通过形心C的 φ向合力为0,
故物理方程形式相似。
平面应力问题的物理方程:
1 E
(
),
1 E
(
),
2(1 E
)
。
对于平面应变问题,
只须作如下同样变换,
E
1
E
2
,
。 1
泰勒展开
Exercise : Chap 4
Today: 4-1, 4-2 End of Lecture 9
边界条件
弹性力学简明教程-第四章_平面问题的极坐标解答习题详解

第四章 平面问题的极坐标解答典型例题讲解例4-1 如图所示,矩形薄板在四边受纯剪切力作用,切应力大小为q 。
如果离板边较远处有一小圆孔, 试求孔边的最大和最小正应力。
例4-1图【解】(1)根据材料力学公式,求极值应力和量大正应力的方位角α0max min 2x y σσσσ+⎫=⎬⎭ 其中0,,x y x q σστ===得max min ,q q σσ==-。
最大正应力σmax 所在截面的方位角为α0max 0max 0tan 104yqq τασσπα=-=-=-→--=-qqx若在该纯剪切的矩形薄板中,沿与板边成π4方向截取矩形ABCD ,则在其边界上便承受集度为q 的拉力和压力,如图所示。
这样就把受纯剪切作用的板看作与一对边受拉,另一对边受压的板等效。
(2)取极坐标系如图。
由2222442222cos 2(1)(13),cos 2(13),(4-18)sin 2(1)(13).ρφρφr r σq φρρr σq φρr r τq φρρ⎫=--⎪⎪⎪⎪=-+⎬⎪⎪=--+⎪⎪⎭得矩形薄板ABCD 内的应力分量为()()()2222442222cos 2(1)(13)cos 2(13)sin 2(1)(13)ρφρφa a σq φa ρρa σq φb ρa a τq φc ρρ=--=-+=--+ 其中α为小孔的半径,而孔边最大与最小正应力由式(b ),在ρ=α处得到44cos 2(13)4cos 2,φa σq φaϕ=-+=-当φ=0,π时,孔边最小正应力为(σφ)min=−4q ,当φ=±π2时,孔边最大正应力为(σφ)max=4q 。
分析:矩形板ABCD 边界上各点的应力状态与板内无孔时的应力状态相同。
也可以应用叠加法,求解薄板的各种较复杂的平面应力(应变)问题。
习题全解4-1试比较极坐标和直角坐标中的平衡微分方程、几何方程和物理方程,指出哪些项是相似的,哪些项是极坐标中特有的?并说明产生这些项的原因。
第四章平面问题的极坐标解答
r 2 r r r 2 2
式中 (r, ) ,为应力函数。
应力函数与应力分量之间的关系,可按下述方法导出。
我们注意到,当 0时,x、y 轴分别与r、 轴重
合,此时应力分量
x、
y、
分别与应力分量
xy
r、 、 r 对应
r
( x ) 0
2
dr 2 r dr dr 2 r dr
展开上式得:
r 4 d 4 2r 3 d 3 r 2 d 2 r d 0
dr4
dr3
dr2 dr
这是一个变系数欧拉方程,其通解为
Aln r Br 2 ln r Cr 2 D
式中,A、B、C、D是待定系数。将代入式 (4-8),得应力分量:
1 E
(
r ),
r
2(1
E
)
r
或者
r
E
1 2
( r
),
E
1 2
(
r ),
r
E
2(1
)
r
4. 边界条件
力的边界条件:
r l r m Tr
r l m T
力均对称于它的中心轴(z),故其应力只与r有关,
与极角无关,由于对称性,只有正应力,而剪应 力为零,称此类问题为平面轴对称问题。对于象曲 杆纯弯曲这类问题,其应力也具有这种特点(与θ 无关),但结构不具有对称性,称为应力轴对称问题。
由应力分布的上述特点,可假设应力函数形式为:
(r)
相容方程: ( d 2 1 d )( d 2 1 d ) 0
弹性力学简明教程(第四版)_第四章_课后作业题答案
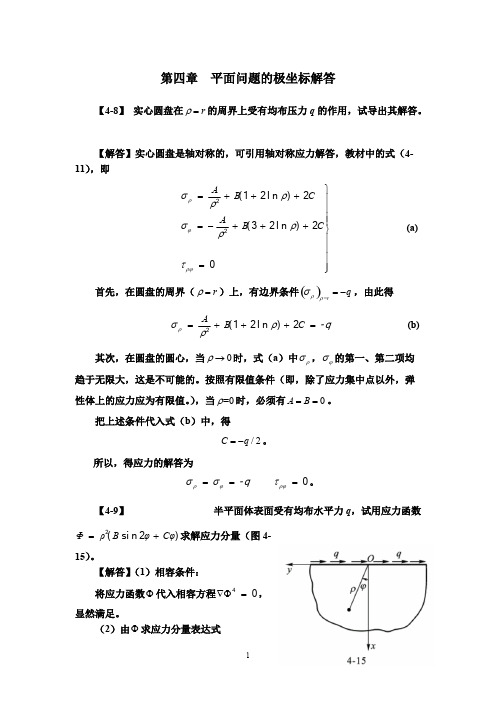
【4-8】 实心圆盘在 r 的周界上受有均布压力 q 的作用,试导出其解答。
【解答】实心圆盘是轴对称的,可引用轴对称应力解答,教材中的式(411),即
A 2
B(1 2 l n ) 2C
A 2
B( 3
2l
n
)
2C Fra bibliotek y 2
2
2 xy
q。
原来的问题变为矩形薄板在左右两边受均布拉力 q 而在上下两边受均布压力 q,如下 图所示。根据教材中的式(4-18)
3
σ
q cos 2(1
r 2)(1 2
3
r2 ) , 2
σ
q
cos
2( 1
3
r4 4
)
,
(a)
( R2 - r2)
2( R2 - r2 )
把 A,B,C 值代入轴对称应力状态下对应的位移分离,教材中式(4-12)。
u
qr 2 E( R2
r 2)
1
1
R2
I
cos
K
si n ,
(b)
u H I si n K cos 0。
【解答】(1)相容条件: 将应力函数 代入相容方程 4 0 , 显然满足。 (2)由 求应力分量表达式
1
=
2B si n 2 2B si n 2
2C 2C
弹性力学第四章 用极坐标解平面问题

第四章 用极坐标解平面问题4.1.极坐标中的平衡微分方程工程上常常可以遇到圆形、环形、楔形或扇形类的结构物。
在这些情况下,用直角坐标描述边界条件会变得相当复杂,由于极坐标使得结构的边界与坐标线一致,因而使边界条件的描述更加简单,使问题更易于求解。
首先我们定义极坐标中的应力分量和体积力分量。
用夹角为ϕd 的两条极径和两条半径相差为ρd 的同心圆弧截取一个微元体(图4.1)。
圆弧截面称为ρ面。
面的法向沿径向而且指向ρ增加方向,这一圆弧面称为正ρ面,反之称为负ρ面。
极径截面称为ϕ面。
面的法向沿环向而且指向ϕ增加方向,这一极径截面称为正ϕ面。
反之称为负ϕ面。
ρ面上的正应力用ρσ表示,剪应力用ρϕτ表示。
ϕ面上的正应力用ϕσ表示,剪应力用ϕρτ表示。
用ρf 表示体积力在径向的分量,用ϕf 表示体积力在环向的分量。
应力的符号规定与直角坐标下的规定完全相同:正面上指向正向(坐标增加的方向)的应力为正值应力,负面上指向负向(坐标减小的方向)的应力亦为正值应力,反之,为负值的应力。
体积力符号规定也与直角坐标下的规定相同,指向坐标轴正向(坐标增加的方向)的体积力为正值,反之,为负值。
直角坐标和极坐标之间具有严格的变换关系。
从理论上说,我们完全可以通过坐标变换的方法由直角坐标的基本方程导出极坐标下的相应方程。
但是,为了加深对极坐标下平衡方程物理意义的理解,我们仍然通过极坐标下的微分单元体的平衡导出极坐标下的平衡微分方程。
我们取一个微分单元体研究,各个面上的应力分量和体积力如图4.2所示。
负ρ面上的正应力为ρσ,剪应力为ρϕτ;正ρ面的坐标比负ρ面增加了ρd ,所以正ρ面的应力和负ρ面相比,应力产生了一个增量,分别为ρρσσρρd ∂∂+和ρρττρϕρϕd ∂∂+。
负ϕ面上的正应力为ϕσ,剪应力为ϕρτ;正ϕ面的坐标比负ϕ面增加了ϕd ,所以正ϕ面的应力和负ϕ面相比,应力产生了一个增量,分别为ϕϕσσϕϕd ∂∂+和ϕϕττϕρϕρd ∂∂+。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
直角坐标(x,y)与极坐标 ( , ) 比较:
相同:两者都是正交坐标系。
区别:直角坐标中, x和y坐标线都是直线,有 固定的方向, x 和y 的量纲均为L。 极坐标中, 坐标线( =常数)和 坐标线( =常数)在不同点有不同的方向;
应用
坐标线为直线, 坐标线为圆弧曲线;
应力公式
(2) 应用特殊关系式,即当x轴移动到与 ρ 轴重合时,有:
2Φ σ ρ (σ x ) υ0 ( 2 ) υ0 , y
(3) 应用应力变换公式(下节)
σ ρ σ x cos 2 υ σ y sin 2 υ 2τ xy cosυsin υ Φ cos υ Φ sin υ 2 Φ cosυsin υ. 2 2 xy y x
的量纲为L, 的量纲为1。这些区别将引
起弹性力学基本方程的区别。 对于圆形,弧形,扇形及由径向线和
环向围成的物体,宜用极坐标求解。用极
坐标表示边界简单,使边界条件简化。
§4-1 极坐标中的平衡微分方程
在A内任一点( , )取出一个微分 体,考虑其平衡条件。
微分体--由夹角为 d υ 的两径向线和距离
1 Φ 2[ ( )]cosυsin υ, ρ ρ
比较两式的 cos2 υ,sin2 υ,cosυsinυ 的系数,便 得出 σ ρ ,σ υ ,τ ρυ 的公式。
为 d ρ 的两环向线围成。
注意:
两 面不平行,夹角为 d υ ; 两 面面积不等,分别为ρd υ , d ρ dυ 。 ρ
从原点出发为正, 从 x 轴向 y 轴方向
转动为正。
作用力
微分体上的作用力有: 体力-- f ρ , f υ, 以坐标正向为正。
应力-- ρ 面, υ 面分别表示应力及其
几何方程
在小变形假定 β 1 下,
cos 1,
sin ,
PB PC ,
tan 。
(u ρ u ρ d ρ) u ρ
PA线应变
PA PA ερ PA
ρ dρ
u ρ ρ
,
PB线应变
PB PB PC PB (ρ u ρ )d υ ρd υ u ρ ευ (f)
拉普拉斯算子的变换:由式(f)得
2 2 2 1 1 2 2 2 2 ( 2 2 )。 (g ) 2 x y
相容方程应力公式
2.极坐标中的相容方程
Φ Φ 0,
4 2 2
(h)
3.极坐标中应力用应力函数 Φ( ρ,υ)表示
可考虑几种导出方法:
(1) 从平衡微分方程直接导出(类似于 直角坐标系中方法)。
2 2 2 1 1 2 2 2 ( 2 2 2 ). x y
2
4Φ 22Φ 0
2 1 1 2 2 1 1 2 ( 2 2 2 )( 2 2 2)
2 2 2 2 2
应力公式
代入式 ( f ) ,得出 σ ρ 的公式。 (4) 应用应力变换公式(下节),
σ x σ ρ cos υσ υ sin υ2τ ρυ cosυsin υ,
2 2
2Φ 2Φ sin 2 υ( 1 Φ 1 2Φ )cos 2 υ 而 σx 2 2 ρ ρ ρ 2 ρ 2 y ρ
M
C
0 --通过形心C的力矩为0,当
考虑到二阶微量时,得
。
(c)
思考题 1、试说明在导出上述平衡微分方程中,同样
应用了连续性和小变形的基本假定,因而
适用的条件也是这两个。 2、试对微分体上的不同点列出平衡条件;或 者考虑每一面上的应力为非均匀分布时列
出平衡条件,证明式(4-1)在二阶微量
几何方程
PA转角 0, PB转角
CB CB β PC PB (u u ρ υ ρd υ d υ) u ρ 1 u ρ 。 ρ υ
所以切应变为
1 u 。
几何方程
2. 只有环向位移
u υ ,求形变。
P,A,B变形后为 P,A,B, 各点的位移如图
式(a)中1、2、4项与直角坐标的方向相似; 而
σρ ρ
--是由于 ρ 面面积大于 ρ 面面
积而引起的,
συ ρ
--是由于 面上的 在C点的 向有
投影。
F 0
υ
--通过形心C的 υ向合力为0,
d d ( )d cos d cos 2 2 ( d )( d )d d d d ( d )d sin d sin f d d 0, 2 2
Φ cos Φ cosυ Φ sinυ (sinυ )Φ。 y ρ ρ υ ρ ρ υ
(e)
二阶导数
二阶导数的变换公式,可以从式(e) 导 出。例如
2 Φ ( Φ ) x x x 2 sinυ )(cos Φ sinυ Φ ). (cosυ υ ρ ρ υ ρ ρ υ
2 2
2 1 1 2 2 1 1 2 ( 2 2 2 )( 2 2 2) 2 2 1 1 2 1 2 1 1 2 2( 2 2 2 ) ( 2 2 2) 1 2 2 1 1 2 2 2( 2 2 2) 4 2 3 1 2 1 2 4 2 3 4 2 2 3 2 2 2 3 3 2 4 2 1 4 4 2 4 4
对于平面应变问题,只须作如下同样变 换,
E E , 2 1
。 1
边界条件
边界条件--应用极坐标时,弹性体的 边界面通常均为坐标面,即:
常数,或 常数,
故边界条件形式简单。
思考题
1、试考虑在导出几何方程时,考虑到哪一
阶微量,略去了哪些更高阶的微量? 2、试比较极坐标中和直角坐标中的基本方 程和边界条件,有哪些相似之处和不同 之处,为什么会有这些差别?
增量。
应力同样以正面正向,负面负向的 应力为正,反之为负 。
平衡条件
平衡条件:
应用假定:(1)连续性,(2)小变形。
考虑通过微分体形心 C 的 , 向及矩的平
衡,列出3个平衡条件:
F
0,
F
0,
M
c
0。
F
ρ
0 --通过形心C的 ρ 向合力为0,
)( d )d d d )d d d sin d sin 2 2
§4-3 极坐标中的应力函数
与相容方程
以下建立直角坐标系与极坐标系的变 换关系,用于: 1、 物理量的转换; 2、从直角坐标系中的方程导出极坐标 系中的方程。
坐标变换
1.从直角坐标系到极坐标系的变换 坐标变量的变换:
x cos ,
反之
2 2 2
y sin ;
(a)
y (b) x y , arctan 。 x
的精度内总是相同的。
§4-2 极坐标中的几何方程 及物理方程
几何方程--表示微分线段上形变和位移 之间的几何关系式 。 过任一点 ρ,υ 作两个沿正标向的微分线 段,
PA d , PB d。
几何方程
1.只有径向位移 u ,求形变。
P,A,B变形后为 P', A', B' ,各点的位移如图。
Φ Φ ρ Φ υ. y ρ y υ y
一阶导数
而
cos , x
sin , x
sin ; y
cos 。 y
代入,即得一阶导数的变换公式,
Φ sin Φ sinυ Φ cosυ (cosυ )Φ , x ρ ρ υ ρ ρ υ
Φ( x, y) Φ( ρ,υ).
函数的变换:将式(a) 或 (b) 代入,
坐标变换
矢量的变换:位移 d (u, v) (u ρ , uυ ),
或
u u cos u sin , v u sin u cos 。 u u cos v sin , u u sin v cos 。
(c)
(d)
坐标变换
导数的变换: 将对 x, y的导数,变换为对 ρ,υ 的导数:
Φ ( x, y ) 可看成是 Φ Φ(ρ,υ) ,而 ρ,υ 又
是 x, y的函数,即 Φ 是通过中间变量 ρ,υ, 为 x, y 的复合函数。 有:
Φ Φ ρ Φ υ , x ρ x υ x
(a)
物理方程
极坐标中的物理方程
直角坐标中的物理方程是代数方程, 且 x 与 y 为正交,
极坐标中的物理方程也是代数方程,且
ρ 与 υ 为正交,
故物理方程形式相似。
物理方程
平面应力问题的物理方程:
1 ( ), E 1 ( ), E 2(1 ) 。 E
POP
u .
(使直角扩大,为负值)
切应变为
u u 。
几何方程
3.当 u ρ和 u υ同时存在时,几何方程为
u , u 1 u , u u 1 u 。
( ( (
d d d )d cos d cos f d d 0, 2 2