弹性体过盈配合解析解 将空间问题转换成平面应变问题
完全接触条件下轴孔过盈配合的解析解_范小秦
A1 k , B1 k , A2 k , B2 k , C1 k , D1 k , C2 k , D2k 都是待定系数。 其中, N 解可得 将式( 16 ) 与( 17 ) 代入轴对称问题的 P-
ur =
∞
[ B1k b u1 ( β k r) + B2k b u2 ( β k r) + D1k d u1 ( β k r) + D2k d u2 ( β k r) ] sin( β k z) ∑ k =0 ∞ w = ∑[ A1k a w1 ( β k r) + A2k a w2 ( β k r) + C1k c w1 ( β k r) + C2k c w2 ( β k r) ] sin( β k z) + k =0 ∞ ∑[B1k bw1 ( βk r) + B2k bw2 ( βk r) + D1k dw1 ( βk r) + D2k dw2 ( βk r) ]cos( βk z)
2 2 1 - μ B z 1 1 1 μ B r B r μ + ( + ) - × ( 2 + ) ( rB r + zB z + B0 ) } σ z = 2 G{ 2 ( rB r + zB z + B0 ) - 4 ( 1 - 2 μ) z 4 ( 1 - μ) 1 - 2 μ r 1 - 2 μ z 1 - 2 μ r r r r 2 B B 1 1 r z ( + ) - ( rB + zB z + B0 ) } rz = 2 G { 2 z 4 ( 1 - μ) zr r r
( 11 ) ( 12 )
弹性力学课件

弹性力学的研究对象主要是弹性 体,即在外力作用下能够发生变 形,当外力去除后又能恢复到原 来形状的物体。
弹性体基本假设与约束条件
基本假设
弹性体在变形过程中,其内部各点间 距离的变化是微小的,且这种变化不 影响物体的整体形状和大小。
约束条件
弹性体的变形受到外部约束条件的限 制,如支撑、连接等,这些约束条件 对弹性体的变形和内力分布产生影响 。
2
例题2
无限大平板受均布载荷作用下的应力分 析。利用弹性力学理论求解无限大平板 在均布载荷作用下的应力分布,并讨论 平板厚度对应力分布的影响。
3
例题3
圆柱体受内压作用下的应力分析。通过 解析法或数值法求解圆柱体在内压作用 下的应力分布,并讨论不同材料属性和 几何参数对应力分布的影响。
03
弹性体变形协调方程与几何方程
3
讨论
通过对比各向同性和各向异性材料的力学行为, 加深对材料本构关系的理解。
05
平面问题求解方法与应用举例
平面问题定义及分类
平面应力问题
长柱形物体受平行于横截面的外力作用,横截面尺寸远小于轴向 尺寸。
平面应变问题
平面或板状物体受平行于中面的外力作用,中面尺寸远大于厚度。
平面问题的简化
忽略体力,将空间问题简化为平面问题。
各向异性材料本构关系简介
各向异性假设
材料在各个方向上具有不同的力学性质。
本构关系特点
应力与应变之间的关系复杂,需要考虑材料的方 向性。
典型各向异性材料
纤维增强复合材料、层合板等。
典型例题解析与讨论
1 2
例题一
求解各向同性材料在简单拉伸条件下的应力和应 变。
例题二
分析各向异性材料在复杂应力状态下的力学行为 。
弹性力学平面应力平面应变问题
用矩阵形式表示为:
u u (在 u 上)
小结
弹性力学基本方程的一般形式为
回顾
平衡微分方程 σ b 0
(在 内)
几何方程 物理方程
ε tu σ Dε
(在 内) (在 内)
边界条件
nσ t
(在 t 上)
回顾
弹性体在应力边界 t 上单位面积的面力为X 、Y 、Z 。设 边界外法线的方向余弦为 nx、ny、nz ,则边界上弹性体 的应力边界条件可表示为
X Y
nx x ny xy nx yx ny y
nz nz
xz yz
Z
nx zx
ny zy
nz z
其矩阵表达式为
t nσ
(在 t 上)
其中,面积力向量 t [ X Y Z ]T ,方向余弦矩阵为
n n0x
0 ny
0 0
ny nx
0 nz
nz 0
0 0 nz 0 ny nx
5. 位移边界条件
回顾
已知位移 u 边界上弹性体的位移为 u、v、w ,
则有
(1) 物质连续性假定:物质无空隙,可用连续函数来描述; (2) 物质均匀性假定:物体内各个位置的物质具有相同特性; (3) 物质(力学)特性各向同性假定:物体内同一位置的物质在
各个方向上具有相同特性; (4) 线性弹性假定:物体的变形与外来作用力的关系是线性的,
外力去除后,物体可恢复原状; (5) 小变形假定:物体变形远小于物体的几何尺寸。
弹性力学平面应力平面应变问题
回顾
弹性力学目的:对弹性体中的位移、应力、应变进行 定义和表达,进而建立平衡方程、几何方程和材料物 理方程
5 第三章 弹性力学平面问题的解析解法
1. 弹性力学问题的求解方法 (1)按位移求解(位移法、刚度法) 以u、v 为基本未知函数,将平衡方程和边界条件都用u、v 表示, 并求出u、v ,再由几何方程、物理方程求出应力与形变分量。 (2)按应力求解(力法,柔度法) 以应力分量 为基本未知函数,将所有方程都用应力分量表示,并 求出应力分量 ,再由几何方程、物理方程求出形变分量与位移。 (3)混合求解 以部分位移分量 和部分应力分量 为基本未知函数,将,并求出这 些未知量,再求出其余未知量。 2. 按位移求解平面问题的基本方程
问题:
按应力求解平面问题,其基本未知量为: 如何由
x , y , xy
求出形变分量、位移分量?
x
, y , Βιβλιοθήκη y,本节说明第六节 位移分量的求出 以纯弯曲梁为例,说明如何由 , , 求出形变分量、位移分量? x y xy
1. 形变分量与位移分量
(1)形变分量
由前节可知,其应力分量为:
G
将式(a)代入得:
x 1 ( x y)
My u 1 x x E I My v y y E I xy u v 0 y x
(c)
(2)位移分量
u 1 My x x E I v My y y E I u v xy 0 y x
M
M
M
h 2 h 2
yX d y
h 2 h 2
1 3 6 fy d y fh 2
2
2M f 3 h
2 又,应力分量: x 2 6 fy y 2 12M x 2 3 y 所以 y h
y xy 0 y xy 0 y xy 0
9第2章弹性力学平面问题及空间问题有限元
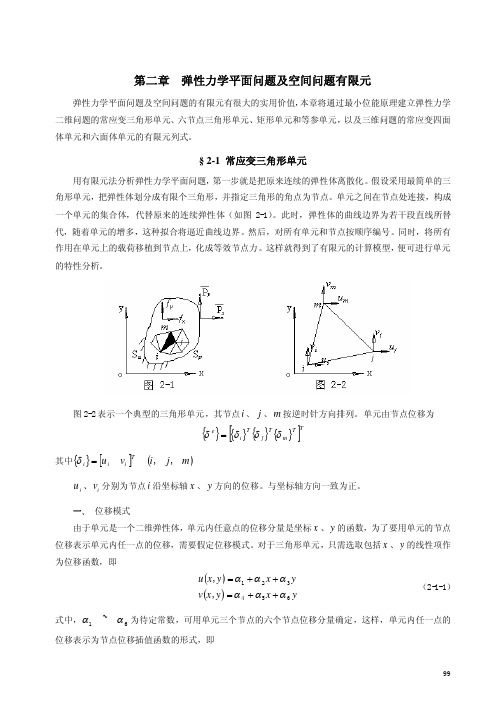
假定的位移函数是多项式,它是连续函数,可以肯定,在单元内部位移函数是单值连续的。由于单 元的位移函数 u 、 v 都是坐标 x 、 y 的线性函数,在单元边界上位移也是线性变化的,两个相邻单元在 公共节点上具有相同的节点位移,因而相邻单元在公共边界上位移连续,即协调条件得到满足。 由上面分析可以看出,三角形常应变单元的位移模式可以保证计算结果的收敛。
px
py
px
py ]
T
(2-1-7b)
(2 )若在 jm 边上受线性分布的水平方向的面力,它在 j 点的集度为 q ,在 m 点的集度为零 (如图 2-5) 。可预计由该面力求得的等效节点载荷只有 R xj 、
R xm ,其余节点载荷分量必为零。
将 jm 边上的分布面力写成 s 的函数,为
s { p} [ (1 ) q 0]T l 在 jm 边上的形函数也需用变量 s 表示,根据形函数的含义,
Ve
[k ii ] [k ij ] [ k im ] [k ji ] [k ij ] [k jm ] [k mi ] [ k mj ] [k mm ]
式中, t 为单元的厚度,当单元划分得足够小时,可以认为每个单元的厚度 t 为常值。子阵为
(2-1-5)
[k rs ] [ Br ]T [ D][B s ]tA
101
二、 单元刚度矩阵 1、单元几何矩阵 [ B ] 有了单元的位移模式,利用平面问题的几何方程求得应变分量
0 x x u e e 0 { } [ L][ N ]{} [B ]{} y y v xy y x
超弹性材料过盈配合的轴对称平面应力解答

( Rr − δ ) 2 b2 (1 − 2 ) P0 σ rr = 2 2 b − (Rr − δ ) R 2 (Rr − δ ) b2 = + σ ( 1 ) P0 θθ b 2 − ( Rr − δ ) 2 R2
(8)
ε ቤተ መጻሕፍቲ ባይዱθ =
( Rr − δ ) 2 1 b2 [ 1 − ν + ( 1 + ν ) ] ⋅ P0 (9) s s Es b 2 − (Rr − δ ) 2 R2
THE SOLUTIONS OF AXISYMMETRIC PLANE STRESS FOR A HYPERELASTIC MATERIAL INTERFERENCE PROBLEM
ZOU Yu , *ZHUANG Zhuo , HUANG Ke-zhi
(Department of Engineering Mechanics, Tsinghua University, Beijing 100084, China)
R r ,外层(Part 3)为钢,其外半径为 b,给出中间层
和外层之间的过盈量 δ ,同时假设平面应力状态, 求过盈配合后的应力和应变状态。
过盈面 Part3 钢 Part2 橡胶 Rs Part1 钢 Rr
式中 R 表示变形前橡胶中某点的半径,而 r 表示过 盈配合后该点的半径。利用轴对称平面问题的平衡 方程:
1 引言
在工业中应用的减震元件中,经常采用橡胶与 金属件过盈配合,例如圆柱铰、球铰等减震橡胶元 件[1] 。这种传统的平面应变解答作为纯力学模型是 有一定意义的。然而,当应用于工业分析时,其应 力值过高,反映这种材料采用平面应变的假定有很 大的局限性和片面性。 根据本文的广义平面应变(平 面应力)的分析结果, 过盈接触后的橡胶应力值是合 理的。当应用于工程问题时,建议以本文的计算结 果为准。
弹性力学-第三章-应变状态分析
第三章应变状态分析位移与变形正应变纯变形位移与刚性转动位移应变分量坐标转轴公式主应变齐次方程组体积应变变形协调方程变形协调方程证明变形与应变分量切应变几何方程与应变张量位移增量的分解应变张量应变状态特征方程变形协调的物理意义变形协调方程的数学意义多连域的变形协调一、内容介绍本章讨论弹性体的变形,物体的变形是通过应变分量确定的。
因此,首先确定位移与应变分量的基本关系-几何方程。
由于应变分量和刚体转动都是通过位移导数表达的,因此必须确定刚体转动位移与纯变形位移的关系,才能完全确定一点的变形。
对于一点的应变分量,在不同坐标系中是不同的。
因此,应变状态分析主要是讨论不同坐标轴的应变分量变化关系。
这个关系就是应变分量的转轴公式;根据转轴公式,可以确定一点的主应变和应变主轴等。
当然,由于应变分量满足二阶张量变化规律,因此具体求解可以参考应力状态分析。
应该注意的问题是变形协调条件,就是位移的单值连续性质。
假如位移函数不是基本未知量,由于弹性力学是从微分单元体入手讨论的,因此变形后的微分单元体也必须满足连续性条件。
这在数学上,就是应变分量必须满足变形协调方程。
在弹性体的位移边界,则必须满足位移边界条件。
二、重点1、应变状态的定义:正应变与切应变;应变分量与应变张量;2、几何方程与刚体转动;3、应变状态分析和应变分量转轴公式;4、应变状态特征方程和应变不变量;主应变与应变主轴;5、变形协调方程与位移边界条件。
§3.1 位移分量与应变分量几何方程学习思路:知识点由于载荷的作用或者温度的变化,物体内各点在空间的位置将发生变化,就是产生位移。
这一移动过程,弹性体将同时发生两种可能的变化:刚体位移和变形位移。
变形位移是与弹性体的应力有着直接的关系。
弹性体的变形通过微分六面体单元描述,微分单元体的变形分为两个部分,一是微分单元体棱边的伸长和缩短;二是棱边之间夹角的变化,分别使用正应变和切应变表示这两种变形的。
由于是小变形问题,单元变形可以投影于坐标平面分析。
弹性力学简明教程(第四版)课后习题解答

弹性力学简明教程(第四版)课后习题解答徐芝纶第一章绪论【1-1】试举例说明什么是均匀的各向异性体,什么是非均匀的各向同性体?【分析】均匀的各项异形体就是满足均匀性假定,但不满足各向同性假定;非均匀的各向异性体,就是不满足均匀性假定,但满足各向同性假定。
【解答】均匀的各项异形体如:竹材,木材。
非均匀的各向同性体如:混凝土。
【1-2】一般的混凝土构件和钢筋混凝土构件能否作为理想弹性体?一般的岩质地基和土质地基能否作为理想弹性体?【分析】能否作为理想弹性体,要判定能否满足四个假定:连续性,完全弹性,均匀性,各向同性假定。
【解答】一般的混凝土构件和土质地基可以作为理想弹性体;一般的钢筋混凝土构件和岩质地基不可以作为理想弹性体。
【1-3】五个基本假定在建立弹性力学基本方程时有什么作用?【解答】(1)连续性假定:假定物体是连续的,也就是假定整个物体的体积都被组成这个物体的介质所填满,不留下任何空隙。
引用这一假定后,物体的应力、形变和位移等物理量就可以看成是连续的。
因此,建立弹性力学的基本方程时就可以用坐标的连续函数来表示他们的变化规律。
完全弹性假定:假定物体是完全弹性的,即物体在对应形变的外力被去除后,能够完全恢复原型而无任何形变。
这一假定,还包含形变与引起形变的应力成正比的涵义,亦即两者之间是成线性关系的,即引用这一假定后,应力与形变服从胡克定律,从而使物理方程成为线性的方程,其弹性常数不随应力或形变的大小而变。
均匀性假定:假定物体是均匀的,即整个物体是由同一材料组成的,引用这一假定后整个物体的所有各部分才具有相同的弹性,所研究物体的内部各质点的物理性质都是相同的,因而物体的弹性常数不随位置坐标而变化。
各向同性假定:假定物体是各向同性的,即物体的弹性在所有各个方向都相同,引用此假定后,物体的弹性常数不随方向而变。
小变形假定:假定位移和变形是微小的。
亦即,假定物体受力以后整个物体所有各点的位移都远远小于物体原来的尺寸,而且应变和转角都远小于1。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
变化。另一方面, 工程实 际中 的轴 毂过盈 联接 的 边缘 应力 问题 必须要加以考虑, 否 则, 轴毂 过盈 联接的 强度 设 计与 寿命 计算 是不符合实际的, 因而也是不可靠的。
( a) 空心轴轴毂过盈配合 ( b) 实心轴轴毂过盈配合 图 1 轴毂过盈配合示意图
2 轴毂过盈联接的有限元分析
b 空心轴的外壁半径; c 毂的外壁半径;
r 轴或毂任意位置的半径。
由以上各式可见, 对空心轴 a r b , 所以, 轴的 r 0, < 0; r 越大, | r | 越大, | | 越小;
r = a 时, | r | = | r | min = 0, | | = | | max =
[ 4] 王启, 等. 常用机械零部件的可靠 性设计[ M ] . 北京: 机械工业 出版 社, 1996.
Jix ie Sheji 3180
收稿日期: 2003- 02- 17; 修订日期: 2003- 07- 31 作者简介: 魏延刚( 1961- ) , 男, 山东人, 研究方向: 现代机械传动、机械设计与机械 CAD 。
2004 年 1 月
魏延刚: 轴毂过盈联接的应力分析和接触边缘效应
37
2 b2 p / ( b2 - a2) ;
等效应力 M ises V on 应力为:
sv =
1 2
[
(
1-
2) 2 + ( 2-
3) 2 + ( 3 -
1) 2]
对轴对称的过盈配合问题, 1 = , 2 = 0, 3 =
r, 对于
实心轴, 显然 sv p ; 毂的最大 M ises V on 应力发生在内壁, 即: r = b 时, | r | = | r| max = p , = max = p ( c2 + b2 ) / ( c2 b 2) , sv = svmax。
轮毂的内径相等时, 轮毂的外径越小, 则轴的( | r | | | sv p ) 径向应力和周向应力的绝对值 、M ises Vo n 应力和轴毂
间 的 压 力 越 小; 轮 毂 的 径 向 应 力 绝 对 值 的 最 大 值
( | r | max = p ) 随轮毂的外径 变小 而减少, 轮毂 的最 大周 向应 力 max 随轮毂的外径变小而增加, 轮毂的径向应力绝对值的最
一方面是为了与弹性力学的计算 结果进 行比较, 另一 方面
有限元分析的结果和圣维南原理 都说明, 在远 离轴毂 接触表 面 的部位应力比较小, 因 此, 研究 的有 限元 模型 仅取 靠近 轴毂 接
触区域的轮毂部分, 并对毂和轴的结构进行了简化, 图 2 是六种 模式的主要尺寸、有限 元模型 和网 格划 分示 意图。轴毂 过盈 联
LI Xiu- lian1, HAN Zh-i xin2 ( 1. Department of M echanical Engineering, Jiangsu T eacher s Institute of T echnology , Changzhou 213001, China; 2. Mechatronic inst itute of G ansu Poly technic U niversity, Lanzhou 730050,
模式 3 140
50. 69 50. 69 156. 28 186. 62 105. 59
注: 过盈量 = 0. 05 mm, 轮毂内径 D 1 = 100 mm
表 2 是六种模式的主要尺寸和 有限元 分析主 要结果, 六 种
模式的过盈量、轮 毂内径和轮 毂长度相 同, 均 分别是 = 0. 05
mm、D 1 = 100 mm 和 H = 60 mm。其中模式 1、2 和 3 轴长与毂 长相同, 均为 60 mm( h = H , 轴外伸部分的长度 n = m = 0) , 三者所 不同 的 是 轮 毂 的 外 径, 分 别 是 D 2 = 300、200 和 140 ( mm) 。模式 4、5 和 6 的轮毂外径分别与模式 1、2 和 3 的相同, 分 别 是 D 2 = 300、200 和 140 ( mm) , 但模式 4、5 和 6 与模式 1、2 和 3 有很重要的差别, 那就是, 模式 4、5 和 6 轴长与毂长不相等, 模
prospects on t he respects of o ptimizat ion design for springs.
Key words: spr ing ; genetic alg orithm; fuzzy reliability; opt-i
mization design
F ig 0 T ab 0 Ref 5
reliabilit y optimization design for springs and carr ied out optimiza-
tion on it by the use of genetic algorithm. I t is indicated by exper-i
ment that the genetic alg orithm possesses fairly good applicable
关键词: 边缘效应; 过盈联接; 接触应力; 应力集中 中图分类号: T H131. 7; TH123 文献标识码: A 文章编号: 1001- 2354( 2004) 01- 0036- 04
由于过盈联接结构简单、定心性能好、承载能力高, 以及在 冲击载荷下性能良好等优点, 轴毂过盈 联接在工 程中得到了 广 泛的应用, 如: 机车车辆的轮对, 应用于 各种机械 中的滚动轴 承 的内圈与轴的配合, 以 及曲轴 的轴 颈与曲 柄的 联接 等等。过 盈 联接一方面要保证联接的可靠性, 另一 方面还要 保证配合零 件 有足够的疲劳寿命, 而过盈联接中的应 力集中对 联接的可靠 性 和轴毂的疲劳寿命有着直接的影响, 所 以有必要 对轴毂过盈 联 接的应力和应力集 中进 行 细致 的研 究, 从而 提 出降 低应 力 集 中、提高联接的可靠性和疲劳寿命的 措施。为此, 人们已经做 了 许多工作, 对过盈联接 的应力 集中 问题有 了一 定的 认识, 提 出 了一些措施, 如: 在轮毂与 轴上 的适当 部位 制造 出适当 形状 的 卸载槽, 可以降低或避免应力集中。那么, 轴毂过 盈联接的应 力 集中是由何引起的? 什 么是 影响 过 盈联 接应 力 集中 的主 要 因 素?如何降低或避免过 盈联接 的应 力集中? 这些 问题的 解答 对 降低或避免轴毂过盈联接的边缘应力集中, 提高 轴毂联接的 可 靠性和过盈联接的寿命具有重要意义和实用价值。
接是典型的轴对称问题,பைடு நூலகம்图 2 所示是整个结构的二分之一。为了
对轴毂过盈联接进行比较全面的 研究, 对轴毂 过盈联 接的六 种 模式进行了详细的有限元分析, 在此, 为了 节省篇 幅, 仅给出 主
要的和有代表性的结果。
表 1 根据弹性力学计算出的轴毂配合三种模式的主要结果
轮毂外径 D2( mm)
轴毂间 压力 p ( N/ mm2)
[ 5] [ 日] 玄光男, 程润伟. 遗传算 法与工 程设计 [ M ] . 汪定 伟, 等译. 北 京: 科学出版社, 2000.
Fuzzy reliability optimal design of cylindrical spiral compression spring based on genetic algorithm
大值和轮毂的最大周向应力两者变化 的综合 效果, 是使轮 毂的
最大 M ises Vo n 应力 svmax 随轮毂的 外径变 小而增 加。另外, 轮
毂的最小周向应力 min 也是随轮毂的外径变小而增加。 由此, 可以得出结论, 轮毂的最大 M ises V on 应力远 大于轴
的最大 M ises Vo n 应力 ; 当过盈量和轮毂的内径相 等时, 轮毂的 外径越小, 轮毂的最大 M ises Von 应 力越 大。值得 注意的 是, 这 个基于弹性力学理论获得的结论, 没有考 虑应力沿 轴向的 变化 情况, 没有考虑应力 在轴毂 两端 边缘 的变 化, 这 也正 是弹 性力 学的局限性, 经典的力学方法尚无 法求解 轴毂两端 边缘应 力的
C h ina)
Abstract: A iming at the limitations of tradit ional optimization
design and by means of applying fuzzy design t heory and reliability
design t heory, this paper established a mathematical model of fuzzy
r = b 时, | r | = | r | max = p , | | = | | min =
p ( b 2 + a2) / ( b2 - a2) 。
对轮毂 b r c, 所以, 毂的 r 0, > 0; r 越大, | r | 越小, 越小;
r = b 时, | r | = | r | max = p , = p ( c2 + b 2) / ( c2 - b2 ) ;
表 1 给出了实心 轴轴毂配合三种 模式的 主要计算 结果, 图
1b 是三种模式的示意图, 三种 模式的 过盈 量和 轮毂内 径相 同,
即: 过盈量 = 0. 05 mm, 轮毂内径 D 1 = 100 mm, 而轮毂外径
D 2 分别为 300 mm、200 mm 和 140 mm。由表 1可见, 当过盈量和
1 轴毂过盈联接的弹性力学解 及其特点
对于图 1a 所示的空心轴轴毂过盈配合, 根据弹性 力学[ 1] ,
假设轴毂的 长度很长( 或 者说, 不 考虑 轴向 边界条 件) , 按圆 筒
受压的轴对称问题, 不难求出轮毂和轴的径向 和周向应力。