各向异性弹性体的应力和应变关系
弹性力学:04 应力和应变的关系

广义胡克定律
杨氏模量
单向应力状态时的胡克定律是
x E x
式中 E 称为弹性模量。对于一种材 料在一定温度下,E 是常数。
Chapter 5.1
广义胡克定律
泊松比
在单向拉伸时,在垂直于力作用线的方向发生收缩。
在弹性极限内,横向相对缩短 x 和纵向相对伸长 y
成正比,因缩短与伸长的符号相反,有:
ν
x y
Chapter 5.1
广义胡克定律
根据实验可知,xy只引起 xy 坐标面内的剪应变xy,
而不引起 xz、yz,于是可得
xy
xy
G
同理
yz
yz
G
zx
zx
G
Chapter 5.1
广义胡克定律
于是,得到各向同性材料的应变-应y
1 E
y
ν x
z
z
ij
1 2
ui, j u j.i
协调条件:
ij,kl kl,ij ik , jl jl,ik 0
对于一个假定位移场ui ,其相应的协调应变分量ij 可直接由应
变-位移关系得到。显然,这组协调的应变和位移,仅仅是许 多其他可能的应变和位移场中的一组。
几何可能的位移未必是真实的,真实位移在弹性体内部须满足 以位移表示的平衡微分方程。
应力和应变的关系
1. 本构关系的概念 2. 广义胡克定律 各向同性体 3. 各向异性弹性体 4. 热力学定律与应变能函数 5. 应变能和应变余能(自学) 6. 热弹耦合本构关系(自学) 7. 例题
应力和应变的关系
1. 本构关系的概念 2. 广义胡克定律 各向同性体 3. 各向异性弹性体 4. 热力学定律与应变能函数 5. 应变能和应变余能(自学) 6. 热弹耦合本构关系(自学) 7. 例题
2-第二章-各向异性材料的应力-应变关系
三、正交各向异性材料的应力-应变关系
具有3个相互正交的弹性对称面的材料称为正交各向异性材料。当图2.2中的
1O2,1O3和2O3平面均为弹性对称面时,按单对称材料的分析方法可以得到式
1 C11 C12 C13 0
2
C12
C22
C23
0
0 C16 1
0
C26
2
233
C013
C23 0
C34 C44
C35 C45
C36 C46
233
31
C51
C52
C53
C54
C55
C56
31
12 C61 C62 C63 C64 C65 C66 12
即刚度矩阵或柔度矩阵具有对称性。因此,一般各向异性材料中独立的 性常数为21个。
二、单对称材料的应力-应变关系
事实上,材料往往具有不同程度的弹性对称性。 单对称性材料是指具有一个弹性对称面的各向异性材 料(即沿两个相反方向,应力应变关系相同)。
应力,即 3 0 ,其他应力分量均为零,得到
1 S11 S12 S13 0
2
S12
S22
S23
0
0 S16 0
0
S26
0
3 3
2
233
S031
S32 0
S33 0
0 S44
0 S45
S36 0
03
(2.20)
1
31
0
0
0
S45 S55
0 0
12 S16 S26 S36 0 0 S66 0
应变—应力关系为:
11 S1111
22
S2211
33 23
第四章 应力和应变的关系

于是
∂K ∂2 u ∂2 v ∂2 w δK = δ t = ∫∫∫ ρ dτ[ 2 δu + 2 δv + 2 δw] ∂t ∂t ∂t ∂t
第二节 弹性变形过程中的能量 对于物体静止时 可认为 δ K = 0 , 不考虑热交换 ,即 δ Q = 0 δ V = δ U , δ U = δ U1 + δ U 2 其中,
c41 = c42 = c43 = 0 c51 = c52 = c53 = 0 c61 = c62 = c63 = 0 只能证9个数为0
第三节 各向同性体中的弹性常数 (2)沿任意两个相反的方向,弹性关系相同。 如只改变z轴方向,w和z的方向改变,则
γ yz
∂w ∂v = + = −γ yz′ ∂y ∂z
σ x = f 1 ( ε x , ε y , ε z , γ xy , γ yz , γ zx ) σ y = f 2 ( ε x , ε y , ε z , γ xy , γ yz , γ zx ) σ z = f 3 ( ε x , ε y , ε z , γ xy , γ yz , γ zx ) τ xy = f 4 ( ε x , ε y , ε z , γ xy , γ yz , γ zx ) τ yz = f 5 ( ε x , ε y , ε z , γ xy , γ yz , γ zx ) τ zx = f 6 ( ε x , ε y , ε z , γ xy , γ yz , γ zx )
+
σ ij , j + X i = ρ u i
..
第二节 弹性变形过程中的能量 由平衡方程: σ ij, j + X i = ρ ui ∂δu ∂u ∂ v ∂u 又 ; ∂ δ v ∂δ u =δ = δε = δγ + = δ +
复合材料力学-各向异性弹性力学基础
复合材料的弹性模量取决于增强相和基体相的弹性模量以及它们之 间的界面结合强度。
强度和韧性
复合材料的强度和韧性取决于增强相的分布、数量和尺寸,以及它 们与基体相之间的界面结合强度。
04
复合材料的各向异性弹性力学分析
复合材料的弹性常数
弹性常数是复合材料在受到外力作用时表现出的刚 度特性,描述了复合材料的应力与应变之间的关系 。
与单一材料的应力-应变关系不 同,复合材料的应力-应变关系 通常是非线性的,因为它们由 多种材料组成,且各组分材料 的性质和排列方式可能不同。
复合材料的应力-应变关系需要 通过实验测定,因为它们的数 值取决于复合材料的微观结构 和组成。
复合材料的本构方程
本构方程是描述复合材料在受到外力作用时如何响应的数学模型,即描述 了复合材料在不同外力作用下的应力和应变的变化关系。
各向异性材料的分类
按来源分类
天然各向异性材料(如木材、 骨骼等)、人造各向异性材料 (如复合材料、玻璃纤维增强 塑料等)。
按结构分类
晶体各向异性材料、纤维增强 各向异性材料、织物增强各向 异性材料等。
按对称性分类
单轴各向异性材料、正交各向 异性材料、各项同性材料等。
各向异性弹性力学的基本方程
01
汽车零部件
复合材料还用于制造汽车中的各种 零部件,如刹车片、气瓶和油箱等, 以提高其耐久性和安全性。
汽车轻量化
复合材料的轻质特性使其成为汽车 轻量化的理想选择,有助于提高车 辆的燃油效率和动力性能。
建筑领域的应用
建筑结构加固
复合材料可以用于加固建 筑结构,提高其承载能力 和耐久性,如桥梁、大坝 和高层建筑等。
未来研究方向
进一步深入研究复合材料的各向异性性质,探索 其在不同环境和载荷条件下的行为和性能。
第2章 各向异性材料弹性力学基础_2017_19990

The basic questions of lamina macromechanics are: (1) what are the characteristics of a lamina? and (2) how does a lamina respond to applied stresses as in Figure 2-1?
• 平衡方程 σ ij , j + fi = 0 i, j = 1,2,3
展开一个方程:
∂σ x ∂x
+
∂τ xy ∂y
+
∂τ xz ∂z
+
f
= 0x
• 运动方程:
σ ij , j +
fi = ρ
∂ 2u ∂t 2
惯性力
指标重复服从加法约定
平衡方程
⎧ ⎪ ⎪
∂σ x ∂x
+
∂τ xy ∂y
+
∂τ xz ∂z
线性弹性力学中的六个应变分量εij之 间必须满足的微分方程。 六个应变分 量εij是由三个位移分量导出的,它们 彼此之间存在一定的内在联系,这些 联系就是应变协调方程。
• (i, j 交换)共有六个方程,六个应变分量应该 满足的一个关系,即:
ε ε ε ε + = + ij,kl
kl,ij
ik, jl
几何关系方程
εx
=
∂u ∂x
,
εy
=
∂v ∂y
,
εz
=
∂w ∂z ,
γ yz
=
∂w ∂y
+
∂v ∂z
;
γ zx
=
我所认识的应力与应变的关系
我所认识的应力与应变的关系我所认识的本构关系可以从三个不同的受力条件下进行分析,第一是在弹性变形下的应力与应变的关系,第二是在屈服条件下的应力与应变的关系,第三是在塑性条件下的应力与应变的关系,而对应力与应变的关系的研究也可以归结为对本构关系的研究。
首先,弹塑性力学分别从静力学和几何学的角度出发,导出了平衡方程的和几何方程,这些方程均与物体的材料性质(物理性质)无关,因而适用于任何连续介质。
但仅仅依靠平衡方程和几何方程来解决实际中的工程问题是不够的。
由于平衡方程仅建立了力学参数(应力分量与外力分量)之间的联系,而几何方程也仅建立了运动学参数(位移分量与应变分量)之间的关系,所以平衡方程与几何方程式两类完全相互独立的方程,他们之间还缺乏必要的联系。
对于所求解的问题来讲,因为您未知量的数目多于任何一类方程的个数,所以无法利用这两类方程求的全部未知量。
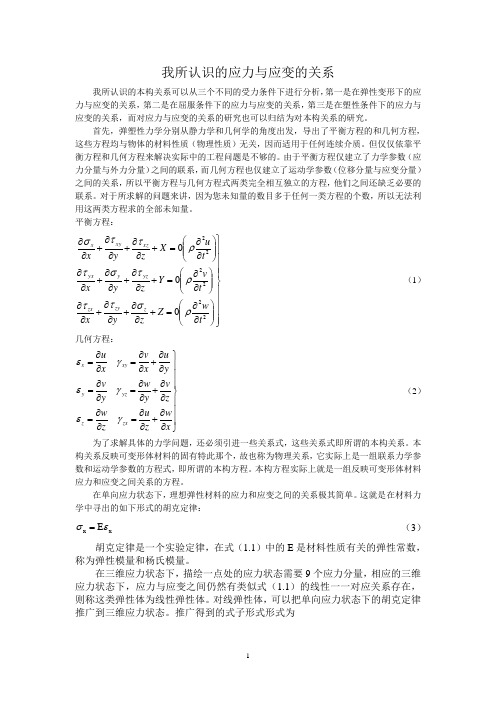
平衡方程:⎪⎪⎪⎪⎭⎪⎪⎪⎪⎬⎫⎪⎪⎭⎫ ⎝⎛∂∂=+∂∂+∂∂+∂∂⎪⎪⎭⎫ ⎝⎛∂∂=+∂∂+∂∂+∂∂⎪⎪⎭⎫ ⎝⎛∂∂=+∂∂+∂∂+∂∂222222000t w Z z y x t v Y z y x t u X z y x z zy zx yz y yx xz xy x ρσττρτστρττσ (1) 几何方程:⎪⎪⎪⎭⎪⎪⎪⎬⎫∂∂+∂∂=∂∂=∂∂+∂∂=∂∂=∂∂+∂∂=∂∂=x w z u z w z v y w y v y u x v x u zx z yz y xy x γεγεγε (2) 为了求解具体的力学问题,还必须引进一些关系式,这些关系式即所谓的本构关系。
本构关系反映可变形体材料的固有特此那个,故也称为物理关系,它实际上是一组联系力学参数和运动学参数的方程式,即所谓的本构方程。
本构方程实际上就是一组反映可变形体材料应力和应变之间关系的方程。
在单向应力状态下,理想弹性材料的应力和应变之间的关系极其简单。
这就是在材料力学中寻出的如下形式的胡克定律:x x E εσ= (3)胡克定律是一个实验定律,在式(1.1)中的E 是材料性质有关的弹性常数,称为弹性模量和杨氏模量。
我所认识的应力与应变关系
我所认识的应力与应变关系经过分析,我们已经得知弹塑性问题中有15个未知量,9个方程,因此它是一个超静定问题,为了求解这一问题必须引入应力应变,它们之间一定存在必然的联系,这种联系就是我们所了解的应力应变关系。
应力应变关系即所谓的本构关系,是物质力学特性的反映,通常用本构方程来描述。
影响本构关系的因素有很多,例如材料、环境、加载类型(载荷、温度)、加载速度(动载荷、静载荷)等,当然,本构关系有很多类型,包括弹性、塑性、粘弹性、粘塑性、各向同性、各向异性本构关系,那么首先来叙述一下简单情况本构关系,所谓简单情况就是六个应力分量x y xy yz zx σσστττ、、z 、、、只有一个不为零,六个应变分量x y xy yz zx εεεγγγ、、z 、、、只有一个自由变化,应力应变关系图1-1。
图中OA 为线弹性阶段,AB 为非线弹性阶段,故OB 为初始弹性阶段,C 点位初始屈服点,()s σ+为初始屈服应力,CBA 为弹性阶段卸载,这一阶段中E σε=,初始弹性阶段结束之后,应力继续增大,进入塑性阶段,CDE 为强化阶段,应变强化硬化,EF 为颈缩阶段,应变弱化软化。
如果在进入塑性阶段卸载后再加载,例如在D 点卸载至零,应力应变关系自D 点沿'DO 到达'O 点,且'DO ∥OA ,其中'O O 为塑性应变p ε,DG 为弹性应变e ε,总应变为它们之和。
此后再继续加载,应力应变关系沿ODEF 变化,D 点为后继屈服点,OD 为后继弹性阶段,()'s σ+为后继屈服应力,值得一提的是初始屈服点只有一个,而后继屈服点有无数个(由加载历史决定)。
若在卸除全部载荷后反向加载,弹性阶段'COC ,()()s s σσ+-=,而在强化阶段'DOD ,()()s s σσ+->,称为Bauschinger 效应。
图1-1、应力应变关系图从上述分析得出材料弹塑性行为有一定的特殊性,主要表现在:弹性应力应变关系是线性,且是单值对应关系,而塑性应力应变关系是非线性的非单值对应。
【doc】正交各向异性材料弹性本构关系分析
正交各向异性材料弹性本构关系分析一1997拒航空发动机第1期正交各向异性材料弹性本构关系分析张晓霞(沈阳建西孬,11OO15)32}3周柏卓(沈阳航空发罚罚面,110015)要:首先给出了正穸各向异性对科在材科主轱坐标最中弹性萃构关系.并由此导出了材科不同方向的弹性毫教之间的关系关键词0匪銮鱼里星嗡讨料三堕笪黾材料单晶材料..查塑苎量壁堡曼泊橙比剪切模量II1引言符号表正应力分量剪应力分量正应变分量剪应变分量方向弹性模量坐标轴问的剪切模量i:Y向作用拉(压)应力引起j方向缩(伸)的泊松比对于各向同性材料,正应力只产生正应变:剪应力分量只产生相应的剪应变分量.与各向同性材料不同,各向异性材料的正应力不仅产生正应变,而且也产生剪应变;同样,剪应力除了产生剪应变外,还要产生正应变;剪应力分量除了产生与之对应的剪应变分量外,还要产生其它的剪应变分量.这种耦合效应是由各向异性材料的物理特性所决定的. 完全各向异性材料的物理特性需要由21个独立的弹性常数来描述.在航空发动机上,用于制造涡轮叶片等高温构件的定向结品材料和单晶材料是正交各向异性的.正交各向异性材料是指通过这种材料的任意一点都存在三个相互垂直的对称面,垂直_丁对称面的方向称为弹性主方向. 在弹性主方向上,材料的弹性特性是相同的. 平行于弹性主方向的坐标轴为弹性主轴或材料主轴,用l_2和3表示这三个材料主轴.2弹性本构方程在正交各向异性材料的材料主轴坐标系中表示应力分量和应变分量或它们的增量. 应力分量与应变分量是不耦合的,其弹性应力应变关系由广义虎克定律确定".=【Cl{…………………?(1))=【c1扣}=【D】{£) (2)其中:㈦【"£,,;}=【l_O-"r"f2r"r;lDL=lc_L..;收稿日期:1996—06—27一/,n,=三EG1997征航空发动机第1期一(3)其中由于弹性矩阵的对称性有:£.u】I=u¨.E2n:£】",ElI,=£",因此,(3)式12个常数中只有9个是独立的求(3)式的逆矩阵.即可得到(2)式中的弹性系数与工程常数之间的关系为=:等鳇鲁每=G,d,^=G11d=G.……(4)其中:逝嚣3应力和应变坐标变换由弹性力学可知,一点的应力状态可由该点的三个相互垂直方向的3个正应力分量和6个剪应力分量表示.由剪应力互等定理可知,这6个剪应力分量中只有3个是独立的这9-t"应力分量组成一个二阶对称的应力张量: 同理,一点的9个应变分量组成一个二阶对称的应变张量,用矩阵分别记为fO-fr][]=l,flrJ通常.总体坐标系与材辩坐标系并不重合在总体坐标系中,正应力分量和剪应力分量之问,剪应力分量和剪应力分量之阅相互耦台.其应力应变关系可通过材料坐标系下应力应变关系的旋转变换得到设[fm,n,].[Zmn]和[Z:mss]分别为总体坐标轴x.Y和Z在材料坐标系中的方向余弦.则坐标变换矩阵H]为『,,用]【'mlL,3m】",J若材料坐标系中的应力张量和应变张量分别记为[]和[£].则应力张量和应变张量的转轴公式分别为【]=】[L【】 (5)]=【【州【棚 (6)[0]:】L】………………………?-(7)【.】=【[】【】…….展开(5)式,并写成矩阵的形式变换矩阵.则{}=【丁1,{}……………….同理展开(6).(7)和(8)式,得:{}=[{}……………{0}:[{…………………{0}:[,{…………………一其中变换矩阵………(8)令[列为….(9)…(IO)…fl1)…(12)2I22■,222'2'2rain,2^^'+'mn''+'+ram2^+''州+(J,It1nJ,+n,/. …………………………(131211,●●●●●●●●●j ,,Z,l一"r●_11l00000上o000上0..0.一0.E一E上B...一.一一...上'一一.00,...—.........—.........—,................,. .一晶~""f+●l~1997年航空发动机第1期I2lf,2¨2222n,n~22_'+''+''',l|^+,l|'''+月'c+rd.分别将(1)式和(10)式代人(11)式,(2)式和(12)式代人(9)式得总体坐标系下正交各向异性材料的应力应变关系矩阵为:【c1=【【c]【…………………-(15)【D]=[.【D】_[ (16)4定向结晶材料弹性常数定向结晶材料具有横观各向同性性质即如果取结晶轴为材料坐标轴3,则在与3轴垂直的平面内材料性能相同.这种材料的独立的弹性系数降为5个.若用工程常数表示. 井考虑到弹性模量E=E..泊松比==s,=a,,剪切模量G=G,则应应变关系矩阵(3)式变为:一000一—,all000占0000}00【J_200一0【J"000士"(3a)=.=:=i1d=Gld=d=G..J在(3a)式中,剪切模量G是不独立的,可用1—2平面内的弹性模量E和泊松比.表示.通过绕结晶轴旋转变换得:G.:!"2(1)剪切摸量G.的直接测量较困难,通常测量与结晶轴成45.夹角方向的拉伸弹性模量E 并由此导出剪切摸量G使总体坐标轴x与材料坐标轴1重合,z轴与3轴成45.夹角,则z轴方向的弹性模量即为E将其方向余弦代人总体坐标系的应力应变关系(15)式中得:1G=毒E一击E一亡E+E……J】"J^J6单晶材料弹性常数在单晶材料的三个材料主轴方向上.材料的弹性特性分别相等,令三个方向的弹性模量E=E=E.=E泊松比.===2=u==.剪切摸量,G=G=G=G,则在材料主轴坐标系中,单晶材料的应力应变关系矩阵(3)式变为:一穹耋堂爹晶材料的弹性系数与[Cl:工程常数之间的关系为: ..=:=ii:;;.(1一.)E.E,d'—(I-,u,~)E—,-2,un2E.锋(4a)一坐一一u000£££一兰一一u000£££一一一1000.EEE,1000_l_00l.....l.o.o.石1(3b)由(4)式可得单晶树科的弹性系数为^吼f,●ir●●l一.一E一'0o.一一上一一£.....一一r●●●●●●●●Jr.●●●11997拒航空发动机第1期.==:1=:=G(45)在总体坐标系中,单晶材料的弹性常数是总体坐标系方向的函数,用表示坐标轴3与轴z的夹角;表示轴1与轴x,z平面的夹角.则坐标变换矩阵[]为:lCOStZCOcosasinfl—sinal【—s|nCO0f (I9)IsiNa~osinasinflc0I将(19)式代人总体坐标系下的应力应变关系矩阵(15)式可得到总体坐标系下的弹性系数:Ez,.G盯,Grz和Gzx.:一f三一(COS~a+SEE\EGJ. ……………………………….……………"(20)u一(2+2一£G)sinco(1一sinos所i面…………………………………………………? (2I)u一(2+2一E/G)s~nasia肛os卢.一I-(2+2,u-E'G)sin=a(cos~a+sin=asin:flcos2f1) ….…………….-….…..….…一…………? (22,:¨l_+4f一n,pco~p…(23)GG.EG,一_L:+4f等一1sin2asc…(24)G,G£G…+4f一1.n~acoc0).G—G\£G,'单晶材料有三个独立的弹性常数.这三个常数可由材料主轴方向的弹性模量E.泊松比"和剪切模量G组成.对单品材料,通常给出在[100],[110]和[111]方向的弹性模量E, E.和E,而不直接测量剪切模量G.将=45.,=O代人(20)式得剪切模量与[110]方向的弹性模量之间的关系为:j42—2一GElj,,一—i (26)将=54.7356..F=45.代人(2O)式得剪切模量与[111]方向的弹性模量之闸妁关系为l31—2"一Gi一彳 (27)由(26)种(27)式可得单品材料[100].[110]和[111]方向的弹性模量之间的关系为:141.一3E一………'(.)用(28)式预测了俄罗斯某单晶材料和美国单晶材料PW A1480[110]方向的弹性模量.其结果见表1和表2由表1可见.俄罗斯的这种单晶材料对f28)式符合得很好,其最大误差只有一2.07%;而单晶材料PW A1480对(28)式符合得较差,当温度较低时.误差是负的.当温度较高时.误差是正的.其虽大误差达到19.6.袁1某单晶材料弹性横■E(GPa)温度I:℃)实测值硬测值误差()20226.2225.1—0.48800184.2182.7—086900174.5174.3—0.1210001653161.9—2.07图1表示单晶材料PW A1480在=90..54.7356.和45.时.弹性模量E随转角的变化规律当=45.时,E达到最大值.图2表示在=54.7356.时.弹性模量E.E和E随转角的变化规律.图3表示单品材料PW A1480在一90.,54.7356.和45.时,泊松比随转角的变化规律.当fl=45.时,达到最小值图4表示在一90.时,泊松比和随1997伍航空发动机第l期最2单晶材料PW A]480弹性模量(GPa) 温度(_f)宴制填预测值误差() 42722131876—1524760174.416O.9—77587l149615644.58 9821331147310701093917109.7l960-.ff一,~,卜』./I\L:}_015如456D75舶'^咄.fReqd~,c')图1弹性横量EJ--a=90'一口=54.7'\l—a=45.O如朽种7j^'kRoI-师')转角的变化规律.当:45.时,zx选到晶大值,达到最小值从罔4可以看出.泊松比柏最小值小于零.这表示在z方向单向拉伸时,在Y方向不是收缩,而是膨胀;此时zx达到最大值,值达到0.8左右.+表示横截面积的收缩情况.图5表示单品材料PW A1480在一90.,54.7356.和45.时,剪切模量G随转角口的变化规律当一45.时,G达到最小值网6表示在a=54.7356.时,剪切模量GG和G随转角的变化规律._I/\},,/i\—.,/,7.,r,}一/1]a=54l:备广O巧舯.j鲫^ⅡgkRotlfl~川'】图2弹性模量E,EriEz}}}一.._一Lvj,【lL———J0I530印75钟AagtcorR~Jiaa'I图3泊松=r?国4泊松比村和20}一言0^昌na鲁.,廿0_,∞;一暑u呈∞言t¨¨0o名2善吣¨00目H.q口01997拄航空发动机第1期小结号:宅=i三^ⅡeRJttati~.图5剪切模置G1)E,和G是单晶材料最基本的3个独立的弹性常数,如果用(26)式和(27)式决定G,可能得到不同的结果.2)单品材料只有两个方向的弹性模量是独立的,任何第三个方向的弹性模量都可由这两个方向的弹性模量表示.[100]方向的弹性模量和泊松比以及与这个轴不平行也不垂直方向的弹性模量构成单品材料三个独立的弹性常数.3)单品材料PwA148O对(28)式符合得较In7.1'j,.-l/~-i!--GxY/GI一0l5舯'5∞90^n山.fRoI-衄'J母6剪切模置GG和GⅡ差.最大误差达到19.6%.4)单品材料的剪切模量对方向很敏感如果方向偏差10.,剪切模量的偏差可达20%.参考文献1张允真一曹富新弹性力学及其有限元法中国铁道山版社,19832GA.Swanson.I.LiaskD.M.NissleyLife PredictionandConstitutiveModelsF0tEngine HotSectionAnisortoplcMaterialsPrpgram,NASA——CR——1749521{'.虏暑_。
第四章应力应变关系
4 应力应变关系4.1弹性变形时应力和应变的关系当材料所受应力小于其线弹性极限时,材料应力应变间的关系服从广义Hooke 定律,即1()1()1()111222x x y z y yx zz z x yxy xy yz yz zx zxE E E G G G εσνσνσεσνσνσεσνσνσετετετ⎧=--⎪⎪⎪=--⎪⎨⎪=--⎪⎪⎪===⎩,, (4.1) 式中,E 为拉压弹性模量,G 为剪切模量,ν为泊松比,对于各向同性材料,三个常数之间满足()21E G ν=+关系。
由上式可得11212()()33m x y z x y z m E E ννεεεεσσσσ--=++=++= (4.2) 于是11()'2x m x m x E G νεεσσσ+-=-= 或1112''22x m x x m G G Eνεεσσσ-=+=+ 类似地可以得到1112''22y m y y m G G E νεεσσσ-=+=+ 1112''22z m z z m G G Eνεεσσσ-=+=+于是,方程(4.1)可写成如下形式1212'00'0000'x xy xz x xy xz m v yx y yz yx y yz m G E m zx zy z zx zy z εγγσττσγεγτστσσγγεττσ-⎛⎫⎛⎫⎛⎫ ⎪ ⎪ ⎪=+ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎝⎭⎝⎭⎝⎭即'1122ij ij m ij ij m G Eνεεεσδσ-'=+=+ (4.3)显然,弹性变形包括体积改变的变形和形状改变的变形。
前者与球应力分量成正比,即12m m E νεσ-= (4.4)后者与偏差应力分量成正比,即''12''12''12111222x x m x G y y m y G z z m z G xy xy yz yz zx zxG G G εεεσεεεσεεεσετετετ⎧=-=⎪=-=⎪⎨=-=⎪⎪===⎩,,或简写为2ij ij G σε''= (4.5)此即为广义Hooke 定律。
应变和应力的关系公式
应变和应力的关系公式应变和应力是力学中非常重要的概念,它们描述了物体在外力作用下的变形和反抗变形的能力。
应变是物体在外力作用下发生变形的程度,而应力是物体对外力的反抗程度。
应变和应力之间存在着一定的关系,下面将通过分析和解释来阐述这一关系。
我们来看一下应变的定义。
应变通常用来描述物体的形变程度。
当物体受到外力作用时,它的形状会发生改变,这种形变程度就是应变。
应变可以分为线性应变和非线性应变。
线性应变是指物体的形变与受力成正比,比如拉伸或压缩后物体的长度或体积的变化。
非线性应变则是指物体的形变与受力不成正比,比如物体的弯曲或扭转。
而应力则是物体对外力的反抗程度。
当物体受到外力作用时,它会产生内部的应力,以抵抗外力的作用。
应力可以分为正应力和剪应力。
正应力是指物体内部的应力沿着受力方向的成分,比如拉伸或压缩时物体内部的张力或压力。
剪应力则是指物体内部的应力与受力方向垂直的成分,比如物体发生弯曲或扭转时的切向应力。
应变和应力之间的关系可以通过胡克定律来描述。
胡克定律是力学中一个重要的定律,它描述了弹性体的应力和应变之间的线性关系。
根据胡克定律,当外力作用于弹性体时,弹性体产生的应变与外力成正比,且比例常数为弹性模量。
弹性模量是描述物体抵抗形变能力的物理量,通常用符号E表示。
胡克定律的数学表达式为:应力=弹性模量×应变。
这个关系可以简洁地表示了应变和应力之间的关系。
根据这个关系,我们可以推导出应变和应力之间的其他关系。
比如,如果已知应变和弹性模量,可以通过应变乘以弹性模量来计算应力。
同样地,如果已知应力和弹性模量,可以通过应力除以弹性模量来计算应变。
除了胡克定律,还有其他的应变与应力之间的关系,比如柯西应变与柯西应力之间的关系、拉梅应变与拉梅应力之间的关系等。
这些关系都是通过实验和理论推导得到的,它们描述了不同应变与应力之间的关系,适用于不同的物体和力学问题。
总结起来,应变和应力之间存在着一定的关系,可以通过胡克定律或其他相关定律来描述。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
下面从广义胡克定理公式出发,用应变能的概念建立常见的各向异性弹性体的应力和应变关系。
1.完全各向异性弹性体
根据格林公式和广义胡克定律,有
;对于上式,如果对切应变γxy求偏导数,有。
同理,有;对
于上式,如果对正应变εx求偏导数,有。
因此,C14=C41。
对于其它的弹性常数可以作同样的分析,则C mn=C nm
上述结论证明完全各向异性弹性体只有21个弹性常数。
其本构方程为
2.具有一个弹性对称面的各向异性弹性体
如果弹性体内每一点都存在这样一个平面,和该面对称的方向具有相同的弹性性质,则称该平面为物体的弹性对称面。
垂直于弹性对称面的方向称为物体的弹性主方向。
若设yz为弹性对称面,则x轴为弹性主方向。
以下根据完全各向异性弹性体本构方程,推导具有一个弹性对称面的各向异性弹性体的本构方程。
将x轴绕动z 轴转动π 角度,成为新的Ox'y'z'坐标系。
新旧坐标系之间的关系为
x y z x'l1=-1m1=0n1=0
y'l2=-1m2=0n2=0
z'l3=-1m3=0n3=0
根据弹性对称性质。
关于x轴对称的应力和应变分量在坐标系变换时保持不变,而关于x轴反对称的应力和应变分量在坐标系变换时取负值。
所以
σx' =σx,σy' =σy,σz' =σz,τx'y' =τxy,τy'z' =τyz,τz'x' =τzx
εx' =εx,εy' =εy,εz' =εz,γx'y' =γxy,γy'z' =γyz,γz'x' =γzx
根据弹性主方向性质,作这一坐标变换时,本构关系将保持不变。
根据完全各向异性弹性体的本构方程,将上述关系式
代入广义胡克定理,可得
将上式与广义胡克定理相比较,要使变换后的应力和应变关系保持不变,则必有
C14=C16=C24=C26=C34=C36=C54=C56=0
这样,对于具有一个弹性对称面的弹性体,其弹性常数由21个将减少为13个。
具有一个弹性对称面的弹性体的应力应变关系为
3.正交各向异性弹性体
若物体每一点有两个弹性对称面,称为正交各向异性弹性体。
以下根据完全具有一个弹性对称面的各向异性弹性体本构方程
推导具有两个弹性对称面的各向异性弹性体的本构方程。
设xz 平面也是弹性对称面,即y轴也是弹性主方向。
在具有一个弹性对称面的基础
上,将y轴绕动z轴转动 角度,成为新的Ox'y'z'坐标系, 如图所示。
根据弹性对称性质。
关于y轴对称的应力和应变分量在坐标系变换时也保持不变,而关于y轴反对称的应力和应变分量在坐标系变换时取负值。
所以,则新旧坐标系下的应力和应变分量的关系为
σx' =σx,σy' =σy,σz' =σz,τx'y' =-τxy,τy'z' =-τyz,τz'x' =τzx
εx' =εx,εy' =εy,εz' =εz,γx'y' =-γxy,γy'z' =-γyz,γz'x' =γzx
将上述关于y 轴弹性对称的应力应变关系代入具有一个弹性对称面的各向异性材料本构关系。
为保持应力和应变在坐标变换后不变,则必有
C15= C25= C35= C64=0
这样,对于具有二个弹性对称面的弹性体,
如图所示,其弹性常数由13个将减少为9个。
于是其应力应变关系简化为
假如弹性体有3个弹性对称面,也就是说,如果设xy平面也是弹性对称面,z轴也为弹性主方向,则类似的推导可以证明,本构方程不会出现有新的变化。
因此,如果相互垂直的3个平面中有两个弹性对称面,则第三个必为弹性对称面。
二个弹性对称面的弹性体本构方程表明:如果坐标轴与弹性主方向一致时,正应力仅与正应变有关,切应力仅与对应的切应变有关,因此拉压与剪切之间,以及不同平面内的剪切之间将不存在耦合作用。
这种弹性体称为正交各向异性弹性体,其独立的弹性常数为9个。