基于RecurDyn的U型滑道约束型输送链建模及动力学仿真
recurdyn 实例

recurdyn 实例
RecurDyn是一种基于多体动力学理论的仿真软件,主要用于模拟复杂机械系
统的运动和动力学行为。
通过RecurDyn,用户可以对各种机械系统进行仿真分析,包括机械臂、机器人、车辆、飞机等。
下面将介绍一些RecurDyn的实例应用:
1. 机械臂仿真:RecurDyn可以用来模拟各种类型的机械臂,包括工业机器人、医疗机器人等。
通过建立机械臂的模型,并设置各种约束条件和控制参数,可以实现对机械臂的运动学和动力学分析,包括工作空间分析、碰撞检测、运动学逆解等。
2. 汽车悬挂系统仿真:RecurDyn可以用来模拟汽车的悬挂系统,包括悬挂弹簧、减震器、转向系统等。
通过对汽车悬挂系统进行仿真分析,可以评估悬挂系统的性能,优化悬挂系统的设计,提高汽车的行驶稳定性和舒适性。
3. 机械振动分析:RecurDyn可以用来模拟机械系统的振动行为,包括自由振动、受迫振动等。
通过对机械系统的振动进行仿真分析,可以评估机械系统的振动特性,预测振动的影响,优化机械系统的设计。
4. 飞机机翼仿真:RecurDyn可以用来模拟飞机机翼的变形和振动,包括机翼
的弯曲、扭转等。
通过对飞机机翼的仿真分析,可以评估机翼的结构强度,优化机翼的设计,提高飞机的飞行性能。
总的来说,RecurDyn是一款功能强大的多体动力学仿真软件,可以广泛应用
于机械、航空航天、汽车等领域的工程设计和分析中。
通过RecurDyn的实例应用,可以更好地理解和掌握机械系统的运动和动力学行为,为工程设计提供有效的仿真分析工具。
基于RecurDyn的多体动力学仿真

图1 经简化的一对空链节模型二、仿真分析1.运动状态与干涉校验首先必须考虑到链条柔度对运动的干涉影响,即考虑到在设计的平面柔度和扭转柔度范围内,长链条和最图2 链式输送机构的仿真模型图3 链式输送机构的运动仿真图4 链节的空间位移曲线CAD/CAM与制造业信息化・www.icad.com.cn图5 冲击动载荷分析3.运动平稳性分析由于链式输送模型中含有多种非线性因素,采用完全递归算法,对各链节的各自由度运动幅值的敛散性进行分析,来判定链式输送系统的运动平图6 加速度响应4.抱紧力分析抱紧臂的抱紧力设计也十分重要,该值越大,抱紧传输体越可靠,但装卸传输体就困难了;另一方面,从链节中脱出传输体将消耗过多的能量,对其他的相关机构工作不利。
若该值较低,则容易使传输体在输送过程的剧烈抖动中掉落,产生故障,因此需要进行抱紧臂的抱紧力动态载荷分析,分析结果如图7所示。
图7 动态载荷分析三、结束语本文应用RecurDyn多体动力学软件,在导入原有实体模型的基础上,快速构建仿真模型。
根据RecurDyn提供的多级子系统建模、空间多接触和完全递归算法等特有功能,对复杂链式输送机构的分析问题进行了动力学仿真,得到了做为设计参考的动力学参数,为链式输送机构的动力学设计提供了很好的设计校验方法。
仿真结果可以检测输送系统工作的平稳性和可靠性,并预测链式输送机构故障的发携手济钢机制公司,WIT-CAPP续写业界辉煌近日,华特软件与济钢集团机械设备制造公司公司”)正式签订CAPP合同。
秉承“可遵、可信、共赢”的济钢机制公司是济南钢铁集团直属的子CAD/CAM与制造业信息化・www.icad.com.cn。
基于RecurDyn软件的反馈驱动带式输送机摩擦驱动性能分析

DOI:10.16525/14-1134/th.2019.05.025总第193期2019年第5期机械管理开发MECHANICAL MANAGEMENT ANDDEVELOPMENTTotal 193No.5,2019引言现阶段,可以构建带式输送机虚拟样机模型及完成仿真分析的软件也较多,主要包括ADAMS 、AMESim 与RecurDyn 。
AMESim 通过弹簧、质量块、阻尼等元件构建得到带式输送机模型,可以充分反映输送带黏弹性,适合分析输送带的动态性能与液压张紧装置的特性,而不太适合描述输送带和驱动滚筒的摩擦接触过程[1-2]。
ADAMS 已经成为现阶段获得广泛应用的一个动力学仿真软件,不太适合构建输送带三维建模,需要采取繁琐的建模过程,并且只能实现很低的建模精度,也无法快速求解刚柔接触问题,不适用于带式输送机的建模与仿真分析[3]。
RecurDyn 软件是一种建立在参数化基础上的皮带-带轮(Belt-Pulley )工具包,实现输送带与滚筒的高效建模及分析,同时采用MFBD 多柔体动力学分析方法可以更真实地完成大变形与柔性体的接触仿真以及柔性体和刚性体的接触仿真,可以采用该方法求解得到输送和滚筒的接触情况并对输送带和增压带的接触方式间分析[4-5]。
因此选择RecurDyn 软件完成带式输送机与反馈增压装置的建模仿真。
1模型建立可以选择Element Assembly 方法对增压带进行建模,其中,纵向上划分带块数量可结合实际情况进行分析,同时确保横向上划分带块数量和输送带相同。
需注意,当两者对同一个滚筒包围后,对输送带与增压带进行建模时需选择不同直径的滚筒,确保模型不会在滚筒处发生重叠。
以尼龙芯橡胶带作为增压带,其中带长为11m ,带宽为900mm 。
从图1中可以看到配备反馈增压装置后得到的带式输送机模型。
RecurDyn 可以为用户提供柔性接触工具,这也成为了以该软件完成带式输送机仿真的一个关键因素。
基于RecurDyn软件的偏心链轮、带传动等柔性传动分析
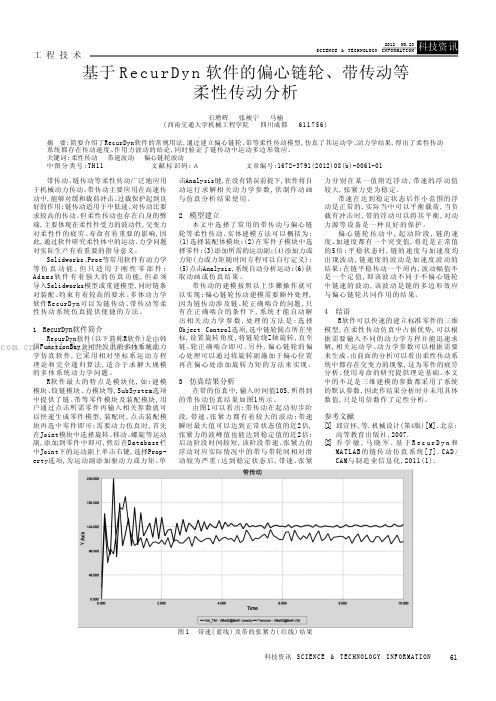
61科技资讯 S CI EN CE & T EC HNO LO GY I NF OR MA TI ON 工 程 技 术带传动、链传动等柔性传动广泛地应用于机械动力传动。
带传动主要应用在高速传动中,能够对缓和载荷冲击、过载保护起到良好的作用;链传动适用于中低速、对传动比要求较高的传动。
但柔性传动也存在自身的弊端,主要体现在柔性件受力的波动性,交变力对柔性件的疲劳、寿命有着重要的影响,因此,通过软件研究柔性体中的运动、力学问题对实际生产有着重要的指导意义。
Solidworks、Proe等常用软件有动力学等仿真功能,但只适用于刚性零部件;Ad am s软件有着强大的仿真功能,但必须导入Solidworks模型或重建模型,同时链条对装配、约束有着较高的要求。
多体动力学软件RecurDyn可以为链传动、带传动等柔性传动系统仿真提供便捷的方法。
1 RecurDyn软件简介RecurDyn软件(以下简称R软件)是由韩国FunctionBay公司开发出的多体系统动力学仿真软件,它采用相对坐标系运动方程理论和完全递归算法,适合于求解大规模的多体系统动力学问题。
R软件最大的特点是模块化,如:建模模块、铰链模块、力模块等,SubSystem选项中提供了链、带等零件模块及装配模块,用户通过点击所需零件再输入相关参数就可以快速生成零件模型,装配时,点击装配模块再选中零件即可;需要动力仿真时,首先在Joint模块中选择旋转、移动、螺旋等运动副,添加到零件中即可,然后在Database栏中Joint下的运动副上单击右键,选择Prop-erty选项,为运动副添加驱动力或力矩。
单击Analysis键,在没有错误前提下,软件将自动运行求解相关动力学参数,供制作动画与仿真分析结果使用。
2 模型建立本文中选择了常用的带传动与偏心链轮等柔性传动。
实体建模方法可以概括为:(1)选择装配体模块;(2)在零件子模块中选择零件;(3)添加所需的运动副;(4)添加力或力矩(力或力矩随时间方程可以自行定义);(5)点击Analysis,系统自动分析运动;(6)获取动画或仿真结果。
recurdyn基本算法

recurdyn基本算法
RecurDyn是一种基于多体动力学的仿真软件,广泛应用于机械工程、航空航天、汽车工程、船舶工程等领域。
本文主要介绍RecurDyn 的基本算法。
1. 多体动力学模型
RecurDyn的核心是多体动力学模型,包括质量、速度、位置、加速度等物理量。
模型的基本假设是物体之间存在相互作用力,根据牛顿定律,物体的加速度与作用力成正比,与物体的质量成反比。
2. 时空离散化
为了对物体的运动进行仿真,需要将时间和空间离散化,即将连续的时间和空间转化为离散的时间和空间。
在RecurDyn中,时间和空间离散化采用了显式欧拉法或隐式欧拉法。
3. 接触检测
接触是多体动力学模型中重要的问题,需要检测物体之间是否接触,并计算接触力。
RecurDyn采用了快速多极子方法或广义平面算法进行接触检测。
4. 接触力计算
在接触检测之后,需要计算接触力。
RecurDyn采用了Hertz接触理论或Coulomb接触模型进行接触力计算。
5. 约束条件
在多体动力学模型中,物体之间存在约束条件,如接触约束、几何约束、运动约束等。
RecurDyn采用了拉格朗日乘子法或笛卡尔-拉
格朗日方法进行约束条件的处理。
以上是RecurDyn的基本算法,通过对这些算法的深入了解和应用,可以更好地进行物体的运动仿真和分析。
基于RecurDyn船用低速柴油机正时链传动的仿真与分析
基于RecurDyn船用低速柴油机正时链传动的仿真与分析王欢;周瑞平【摘要】通过RecurDyn软件,基于广义递归理论,建立船用低速柴油机正时链传动系统运动学和动力学模型,通过实体模型的运动,得出链和链轮的位移、速度、角加速度等参数,验证了滚子链传动系统的运动学和动力学特性,为减少柴油机工作时链条的振动和噪声提供理论参考.【期刊名称】《造船技术》【年(卷),期】2017(000)002【总页数】5页(P23-27)【关键词】链传动;RecurDyn;广义递归理论;运动学和动力学特性【作者】王欢;周瑞平【作者单位】南通航运职业技术学院轮机工程系,江苏南通226010;武汉理工大学能源与动力工程学院,湖北武汉430070;武汉理工大学能源与动力工程学院,湖北武汉430070【正文语种】中文【中图分类】U664链传动作为一种可靠的传动装置和传输装置具有寿命长、强度高、免维修等优点,已在工程机械上应用了较长时间。
柴油机正时链传动系统是链传动在高端传动领域的应用。
链传动系统具有齿轮和皮带传动的优点,在发动机正时系统中有逐步取代齿轮和轴承的趋势[1]。
滚子链传动的主要问题是振动和噪声,链在传动的过程中,从松边到紧边的不断运动,引起张紧力的变化,这将影响链的频率和振幅[2]。
因此,许多学者对滚子链传动系统的动态特性展开了研究。
链传动系统的动态分析和仿真一直是一个复杂的问题,仅在过去的几十年间才开始展开对链传动动力学模型的研究[3]。
RecurDyn软件通过开发广义递归法算法库,采用向后差分法(Backward Differentiation Formula, BDF)和相对坐标进行动力学的分析[4],该方法是链传动系统仿真的新方法。
如图1所示,有一对相邻构件,设构件(i-1)是连接构件(i)的前一个构件,点Oi的位置表示[5]为定义Ai,可得构件(i)在自身参考坐标系中的角速度:其中H′由旋转轴来确定。
对式(1)求导,可得式中:“~”表示由矢量叉积中矢量元素组成的斜对称矩阵,q(i-1)i表示相对坐标矢量,(i-1)i表示求导。
输送机传动链的动力学模拟与优化设计

输送机传动链的动力学模拟与优化设计输送机是一种常见的物料输送设备,广泛应用于矿山、港口、建筑工地等场所。
输送机的传动链是保证其正常运行的重要组成部分,对于输送机的动力学模拟与优化设计具有重要意义。
首先,我们来了解一下输送机传动链的构成。
输送机传动链主要由电机、减速器、输送辊、链条等组成。
电机通过减速器将动力传递给输送辊,使物料得以顺利输送。
链条则起到传递动力的作用,并将物料从一端输送到另一端。
接下来,我们可以进行输送机传动链的动力学模拟。
通过动力学模拟,我们可以了解输送机在工作过程中的各个环节的受力情况,为优化设计提供依据。
首先,我们需要确定输送机的动力学参数,如输送辊的质量、电机的转速等。
然后,结合输送机的结构特点,建立相应的动力学模型。
通过模拟计算,我们可以得到输送机在不同工况下的运行情况,如受力大小、振动情况等。
这些数据可以帮助我们评估输送机的工作效果,并进行进一步的优化设计。
在对输送机传动链进行优化设计时,我们可以从多个方面入手。
首先,选用适当的传动链材料和结构。
传动链需要具有足够的强度和耐磨性,以保证其正常运行。
同时,结构设计上也要考虑到传动的平稳性和可靠性。
其次,合理配置电机和减速器。
电机的功率和转速应该与输送机的负载相匹配,以避免过载或低效运行。
减速器的选用也要考虑到传动比和传动效率,以提高输送机的工作效率。
此外,我们还可以考虑采用变频调速技术,以实现对输送机的精确控制。
最后,定期进行输送机的维护与保养。
输送机传动链处于长时间高速运转状态下,容易产生磨损和故障。
定期进行润滑、紧固和更换易损件等维护措施,可以延长传动链的使用寿命,提高输送机的工作效率和可靠性。
综上所述,输送机传动链的动力学模拟与优化设计对于输送机的正常运行和提高工作效率具有重要意义。
通过动力学模拟,我们可以了解输送机在不同工况下的受力情况,为优化设计提供依据。
在优化设计中,我们可以从材料和结构选择、电机和减速器配置以及维护保养等方面进行考虑。
基于RecurDyn的输送机驱动电机建模
基于RecurDyn的输送机驱动电机建模发表时间:2019-07-09T15:30:54.617Z 来源:《电力设备》2019年第6期作者:李天成[导读] 摘要:输送机电机功率的确定是其设计的关键,本文介绍了设备的结构和工作原理,阐述了基于RecurDyn软件建立输送机虚拟样机的方案以及过程,重点研究了输送机各种工况下的电机功率变化曲线,为输送机的设计提供了依据。
(中国电力工程顾问集团东北电力设计院有限公司吉林省长春市 130021)摘要:输送机电机功率的确定是其设计的关键,本文介绍了设备的结构和工作原理,阐述了基于RecurDyn软件建立输送机虚拟样机的方案以及过程,重点研究了输送机各种工况下的电机功率变化曲线,为输送机的设计提供了依据。
关键词:板式输送机,虚拟样机,动力学,电机功率链轮Determination of motor power of plate conveyor based on Virtual PrototypeLI Tian-cheng(1.Northeast Electric Power Design Institute, Changchun 130021, Jilin Province, China)Abstract:To determine the conveyor motor power is the key to the design of plate conveyor. This paper introduces the structure and working principle of plate conveyor. Describes the methods and steps of RecurDyn software to establish the plate conveyor based on Virtual Prototype. Analysis of plate conveyor no-load and full load start, power changes stable operation and braking conditions. Provide the bases for the design of slat conveyor. Keywords:plate conveyor , Virtual Prototype, dynamics, motor power, chain wheel板式输送机是应用广泛的散料连续输送设备,适于短距离输送运量和粒度较大的物料,也是自移式破碎站的主要组成部分。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Received: Sep. 2 , 2016; accepted: Sep. 20 , 2016; published: Sep. 23 , 2016 Copyright © 2016 by authors and Hans Publishers Inc. This work is licensed under the Creative Commons Attribution International License (CC BY). /licenses/by/4.0/
3.2. 模型的简化及约束
将 UG 环境下建立的三维模型通过公共文件接口导入 RecurDyn 中。为了提高计算的效率,对模型进 行简化[5]。RecurDyn 提供了面求和功能。把两销轴圆柱面求为一体。同理把两侧内、外滑道对应部分, 两端链轮, 负载仓、 轴承、链节板合并求和。 在实际中轴承与滑道之间的摩擦鉴于滚动和滑动摩擦之间, 把其简化成滑动摩擦。 在 RecurDyn 中提供了面面接触和扩展面—面接触约束。根据模型的要求采用扩展面—面接触约束, 不仅能够提高模型的计算精度,而且有利于模型的仿真分析。
杨卫东 等
1 2
天津理工大学机械工程学院,天津 天津商业大学机械工程学院,天津
收稿日期:2016年9月2日;录用日期:2016年9月20日;发布日期:2016年9月23日
摘
要
针对一种特殊工况下的低速重载输送链—U型滑道约束输送链。基于UG建模和Recur Dyn动力学仿真。 由于链传动多边形效应的存在,本文通过施加滑道约束,验证了当主动链轮在规定条件下以最大速度转 动,链节携带不同数量负载,负载处于不同位置时,从动链轮、链节运动速度、加速度的影响。链节携 带不同数量负载,负载处于不同位置时,链节与内外滑道的冲击碰撞产生的接触力情况,销轴与链轮啮 合产生的冲击碰撞载荷变化情况,为同类机构的设计提供理论依据。
4.1. 当主动链轮以规定速度转动时,链节在携带不同负载情况下,从动链轮的速度、加速度变化
从图 4 主、从动链轮速度、加速度的比较可知,由于链传动多边形效应的存在,当主动链轮匀速转 动时, 在满负载情况下, 从动链轮的速度在平均速度上下近似于正弦曲线运动, 但是在极限负载情况下, 其运动规律不是很明显,速度的上下波动非常明显,所以加速度曲线也明显波动。说明链节携带不同负 载及负载处于不同位置对从动链轮的速度、加速产生一定的影响。
Keywords
U-Type Slide Constrained Conveyor, Contact Force, Dynamic Simulation, RecurDyn
基于RecurDyn的U型滑道约束型输送链建模及 动力学仿真
杨卫东1,洪
*
林2*,梁艳书2
通讯作者。
文章引用: 杨卫东, 洪林, 梁艳书. 基于 RecurDyn 的 U 型滑道约束型输送链建模及动力学仿真[J]. 仪器与设备, 2016, 4(3): 35-44. /10.12677/iae.2016.43006
2.3. 接触问题求解现状
接触力在求解时,是以单向约束的问题为理论模型,用弹塑性理论来分析计算的。在发生接触的状 态下,根据设定的接触刚度,以及产生的基础穿透深度来计算接触力及相关的摩擦力[3]。 分析系统构件在发生接触时,RecurDyn 计算接触力是基于 Hertz 接触理论,计算基础产生的法向接 触力 Fn 的公式为:
3. U 型滑道约束型输送链动力学建模
3.1. 模型的建立及装配
U 型滑道约束输送链模型的装配:建立一个装配体模型,载入底板、链节等,在链节部件销轴中心 点与底板运动轨迹线之间添加点在线上副约束[4]。 销轴与链轮之间添加 3D 约束(3D 约束为碰撞接触约束, 链轮和销轴碰撞时进行能量和运动的传递)。图 2 为链节装配结构。
2. U 型滑道约束输送链的力特性分析
2.1. 静载荷分析
根据 U 型滑道约束输送链系统平衡状态,忽略过渡圆弧的轨迹变化。如图 1 所示;U 型滑道上共有 16 个链节,右侧链轮为驱动链轮,左侧链轮为从动轮,两链轮的分度圆半径相等。 模型在静止状态下,链条的受力与单个链节在滑道内的位置,携带的负载数量,负载在链节的位置 有关。所以确定链节在滑道上的位置对链节、滑道、链轮的受力是非常关键的。 内滑道上链节位置。在如图 1 所示的位置下,设链节 P3 中心与竖直方向的距离为 x1 ,内滑道上销轴 到圆心的距离为 R1 ,链节 P3 与竖直方向的夹角为 θ1 ,表示为:
3
(3)
式中 n = 0,1 。同理,设链节 P 11 中心与竖直方向的距离为 x2 ,链节 P 11 与竖直方向的夹角为 θ 2 ,外滑道上 销轴到圆心的距离为 R2 ,则有:
x θ 2 = arcsin 2 R2
(4) (5)
ϕ2 = 2 arcsin
L 2 R2
(6)
2.2. 动载荷分析
U 型滑道约束输送链存在多种动载荷。此系统的链条由滑道约束,故其动载荷主要由多边形效应引 起的惯性载荷、链节在运动过程中受到滑道约束的冲击、销轴与链轮啮合时产生的冲击载荷,链节携带 的负载数量,负载在链节中的不同位置等组成。假设链节携带的负载数量及负载所在的初始位置为已知 输入条件。所以对链节在运动过程中与滑道的接触力、销轴与链轮啮合接触力的研究是非常重要的。
链节 P 12 , P 13 , P 14 , P 10 , P 9,P 8 与竖直方向的夹角 α i :
α12 , α13 , α14 = θ 2 + n + ϕ2 2
1 3 α10 , α 9 , α 8 = n + ϕ2 − θ 2 2
(其中 n = 0,1, 2 )
Instrumentation and Equipments 仪器与设备, 2016, 4(3), 35-44 Published Online September 2016 in Hans. /journal/iae /10.12677/iae.2016.43006
Figure 2. General assembly of chains 图 2. 链节装配结构
38
杨卫东 等
主动轮的驱动采用 RecurDyn 中的 step 函数。step 函数采用三次多项式逼近海赛阶跃函数。step 函数的形 式为:
step ( x, x0 , h0 , x1 , h1 )
Modeling and Dynamic Simulation of U-Type Slide Constrained Conveyor Based on Recurdyn
Weidong Yang1, Lin Hong2*, Yanshu Liang2
1 2
School of Mechanical Engineering, Tianjin University of Technology, Tianjin School of Mechanical Engineering, Tianjin University of Commerce, Tianjin
step 函数中, x 为自变量; x0 为起点自变量值; h0 为阶跃起点处的函数值; x1 为阶跃终点自变量的 值; h1 为阶跃终点的函数值。 所以本模型中主动链轮上驱动函数为 step (time,0,0,0.5,1.256) + step (time,5,0,5.5,-1.256)。 图 3 为模型在满负载和极限负载下的情况:满负载 16 个链节全部携带负载。极限负载模型,只有下滑道 左侧 5 个链节和上滑道右侧 3 个链节携带负载。
Figure 1. Diagram of the conveyor chain 图 1. 输送链示意图
37
杨卫东 等
= Fn kδ n1 + c
δ δ δ
n2
δ n3
(7)
式中, k 为接触刚度系数; c 为阻尼系数; δ 为接触穿透深度; δ 为接触穿透深度的导数(接触点的相对 速度); n1 、 n2 、 n3 分别为刚度指数、阻尼指数、凹痕指数。
4. 机构仿真结构及分析
U 型滑道约束链传动系统用于实现负载运输。链节将物品由一个位置送到预期的位置后定位停止, 以便其他装备完成对该物品的卸载。模型中含有四种不同的负载,四种负载根据需要进行随机的调配, 而且要求每 5.5 s 内,调取所需的负载。链轮要完成加速,匀速,减速三个过程的运动。假设链轮加速, 减速运动的时间分别为 0.5 s,匀速运动的时间为 4.5 s。 根据要求,当连续两次调动相同的负载时,链轮需要在规定的时间内要转过四个链节,此时链轮, 销轴,滑道受到的多边形效应及冲击载荷为最显著,所以对链节转过四个链节的情况进行仿真。
Open Access
Abstract
For a special kind of slow-speed overloading transmission chain—U-type slide constrained conveyor. Modeling based on UG and dynamic simulation based on RecurDyn. As the existence of polygon effect in chain drive, by imposed slide constraint in this paper, it’s verified the effects to velocity and acceleration of the driven sprocket and chain, when driver sprocket is with maximum rotational speed under the specified conditions, and the chain is with different number of load and the load is in different position. When the chain is with a different number of load and the load is in a different position, the changes of the contact force caused by collision between the chain and slide with inside or outside, and the change collision load caused by meshing between the pin roll and sprocket, provided the theoretical basis for the design of similar mechanism.