电机特性曲线
实验报告-直流电机特性曲线
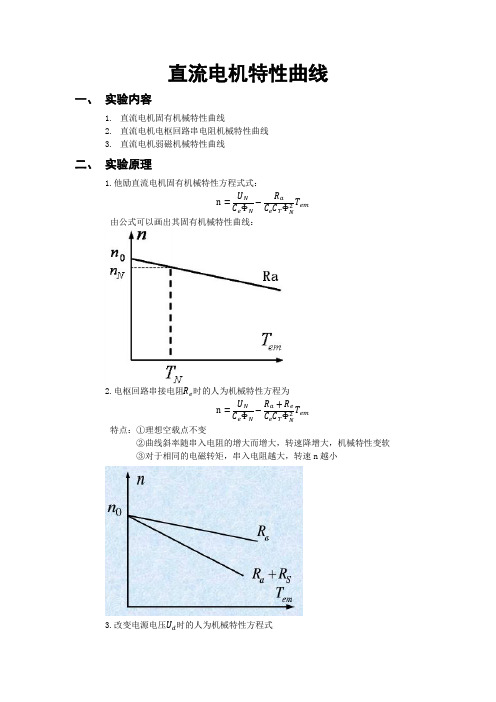
直流电机特性曲线一、实验内容1.直流电机固有机械特性曲线2.直流电机电枢回路串电阻机械特性曲线3.直流电机弱磁机械特性曲线二、实验原理1.他励直流电机固有机械特性方程式式:n=U NC eΦN−R aC e C TΦN2T em由公式可以画出其固有机械特性曲线:2.电枢回路串接电阻R e时的人为机械特性方程为n=U NC eΦN−R a+R eC e C TΦN2T em特点:①理想空载点不变②曲线斜率随串入电阻的增大而增大,转速降增大,机械特性变软③对于相同的电磁转矩,串入电阻越大,转速n越小3.改变电源电压U d时的人为机械特性方程式n=U dC eΦN−R aC e C TΦN2T em特点:①理想空载转速随电源电压降低而成比例降低②曲线斜率保持不变,特性的硬度保持不变③对于相同的电磁转矩,转速n随电源电压降低而减小4.渐弱磁通时的人为机械特性方程式为n=U NC eΦ−R aC e C TΦ2T em特点:①理想空载点随磁通减弱而升高②曲线斜率与磁通成反比,减弱磁通,斜率增大,机械特性变软。
三、实验结果1.固有机械特性 U=U n=220V I fI a(A) 1.110.90.70.60.40.30.20.082 n(r/min)160016131625164716591687170417241752e n f=0.12AI a(A)0.080.10.150.20.250.30.350.40.45n(r/min)1676164015521464138312861213113310493.弱磁U=U n=220V I f=0.11AI a(A)0.0850.10.20.40.60.80.9 1.0 1.1n(r/min)184418401815177717501730171817041691四、实验分析根据实验数据拟合的曲线由图可以得出,实验基本和理论曲线一致。
其中电枢回路串电阻特性曲线,其理想空载点与固有特性曲线不在同一点,可能是由于测量上的误差或者电机时间运行较长,引起电机自身参数略有变化;弱磁机械特性曲线的硬度没有理论中的软,可能是由于实验时,所降低的励磁电流过小而导致。
直流电动机效率特性曲线Matlab仿真
直流电动机效率特性曲线Matlab仿真1. 引言直流电动机是一种广泛应用于工业和自动化领域的电动机。
其效率特性曲线是描述电动机在不同负载下效率变化的重要参数。
本文档将介绍如何使用Matlab仿真来绘制直流电动机的效率特性曲线。
2. 理论基础直流电动机的效率特性曲线可以通过其输入功率、输出功率和效率之间的关系来绘制。
输入功率由电动机的电压和电流决定,输出功率由电动机的扭矩和转速决定。
效率可以表示为输出功率与输入功率的比值。
3. Matlab仿真步骤以下步骤将指导您如何使用Matlab仿真绘制直流电动机的效率特性曲线。
3.1 设定参数首先,需要设定直流电动机的参数,包括电动机的电压、电流、扭矩和转速。
这些参数可以根据电动机的规格书或实验数据来确定。
3.2 构建仿真模型使用Matlab的Simulink工具,构建一个包含直流电动机及其控制系统的仿真模型。
模型应包括电动机的电压输入、电流输出和效率计算部分。
3.3 设置仿真参数在Simulink中,设置仿真的时间范围和步长。
确保仿真时间足够长,以观察到电动机在不同负载下的效率变化。
3.4 运行仿真运行仿真并收集电动机在不同负载下的输入功率、输出功率和效率数据。
可以使用Simulink的数据记录器来存储这些数据。
3.5 绘制效率特性曲线使用Matlab的绘图工具,根据收集的数据绘制效率特性曲线。
将效率作为纵轴,负载作为横轴,绘制出电动机的效率特性曲线。
4. 结果分析分析仿真结果,观察电动机在不同负载下的效率变化。
可以得出电动机的最高效率点和效率下降的原因。
5. 结论通过Matlab仿真,可以绘制出直流电动机的效率特性曲线,并分析其在不同负载下的效率变化。
这种方法可以帮助工程师优化电动机的设计和运行,提高电动机的效率和性能。
参考文献[1] 《直流电动机原理与应用》 - 约翰·F·麦克米伦[2] 《电机与拖动》 - 阿尔弗雷德·布劳恩[3] 《Matlab仿真与应用》 - 罗杰·李。
电机最大效率点算电机机械特性曲线N.m
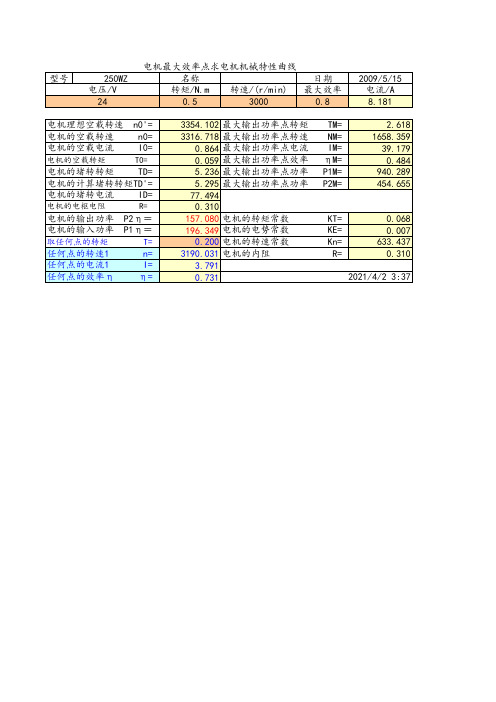
250WZ 电压/V
24
电机最大效率点求电机机械特性曲线
名称
日期
转矩/N.m 转速/(r/min) 最大效率
0.5
3000
0.8
2009/5/15 电流/A 8.181
电机理想空载转速 n0'=
电机的空载转速 n0=
电机的空载电流 I0=
电机的空载转矩
T0=
电机的堵转转矩 TD=
电机的计算堵转转矩TD'=
TM= NM= IM= ηM= P1M= P2M=
2.618 1658.359
39.179 0.484 940.289 454.655
KT=
0.068
KE=
0.007
Kn=
633.437
R=
0.310
2021/4/2 3:37
电机的堵转电流 ID=
电机的电枢电阻
R=
率 P1η=
取任何点的转矩
T=
任何点的转速1
n=
任何点的电流1
I=
任何点的效率η η=
3354.102 最大输出功率点转矩 3316.718 最大输出功率点转速
0.864 最大输出功率点电流 0.059 最大输出功率点效率 5.236 最大输出功率点功率 5.295 最大输出功率点功率 77.494 0.310 157.080 电机的转矩常数 196.349 电机的电势常数 0.200 电机的转速常数 3190.031 电机的内阻 3.791 0.731
直流电动机特性曲线的Matlab仿真分析

直流电动机特性曲线的Matlab仿真分析1. 简介直流电动机是一种将直流电能转换为机械能的装置,广泛应用于各种自动化控制系统中。
特性曲线是描述直流电动机电气和机械性能之间关系的重要工具,对电动机的运行和控制具有重要的指导意义。
本报告通过Matlab仿真分析,对直流电动机的特性曲线进行了深入研究。
2. 理论基础2.1 直流电动机的结构和工作原理直流电动机主要由定子、转子、电刷和换向器等部分组成。
当直流电源通过电刷和换向器输入电动机时,电流通过转子绕组产生磁场,与定子磁场相互作用,使转子旋转。
2.2 直流电动机的特性曲线直流电动机的特性曲线主要包括以下几种:- 转速-电流特性曲线(也称为转速特性曲线):描述了电动机的转速与输入电流之间的关系。
- 转矩-电流特性曲线:描述了电动机的转矩与输入电流之间的关系。
- 转速-负载特性曲线:描述了电动机的转速与负载之间的关系。
- 效率曲线:描述了电动机的效率与负载之间的关系。
3. Matlab仿真模型本研究使用Matlab/Simulink建立了直流电动机的仿真模型,主要包括以下几个部分:- 电源模块:模拟直流电源,为电动机提供恒定或变化的电流。
- 电动机模块:模拟直流电动机的电气和机械性能,包括转矩、转速、电流等参数。
- 负载模块:模拟电动机所承受的负载,可以是恒定的,也可以是变化的。
- 测量和显示模块:实时测量电动机的各项参数,并在仿真界面上显示。
4. 仿真结果与分析4.1 转速-电流特性曲线在不同的负载条件下,仿真得到了电动机的转速-电流特性曲线。
结果表明,随着负载的增加,电动机的转速下降,需要更大的电流来维持相同的转速。
这符合直流电动机的工作原理,即负载越大,转速越低,电流越大。
4.2 转矩-电流特性曲线仿真还得到了电动机的转矩-电流特性曲线。
结果表明,随着电流的增加,电动机的转矩也增加,但增加的速率逐渐减小。
这是因为电动机的转矩与电流成正比,但受到电动机饱和磁场的限制。
直流电动机机械特性曲线在Matlab中的仿真

直流电动机机械特性曲线在Matlab中的仿真简介直流电动机是一种常见的电动机类型,具有广泛的应用领域。
了解直流电动机的机械特性曲线对于电机的设计和控制非常重要。
在Matlab中进行机械特性曲线的仿真可以帮助我们更好地了解电机的性能。
目标本文档的目标是介绍如何在Matlab中进行直流电动机机械特性曲线的仿真。
我们将使用Matlab的Simulink工具来建立电机模型,并通过对电机的电流和转速进行控制,得到机械特性曲线。
步骤以下是在Matlab中进行直流电动机机械特性曲线仿真的步骤:1. 创建电机模型:使用Simulink工具创建一个直流电动机的模型。
模型中包括电机的电流输入和转速输出。
2. 设置电机参数:根据实际情况设置电机的参数,包括电阻、电感、转矩常数等。
这些参数将影响电机的性能。
3. 设计控制器:设计一个合适的控制器来控制电机的电流和转速。
可以使用PID控制器或其他控制算法。
4. 运行仿真:设置仿真时间和仿真步长,并运行仿真。
仿真过程中,控制器将根据设定的输入信号来控制电机的行为。
5. 分析结果:分析仿真结果,包括电机的转速、电流和转矩。
根据这些结果可以绘制出电机的机械特性曲线。
注意事项在进行直流电动机机械特性曲线的仿真时,需要注意以下事项:- 确保电机参数的准确性:电机的参数对仿真结果有很大的影响,因此需要准确地设置电机的参数。
- 选择合适的控制器:控制器的选择对于电机的性能和仿真结果至关重要。
需要根据实际需求选择合适的控制器。
- 仿真时间和步长的设置:仿真时间和步长的选择也会对仿真结果产生影响。
需要根据实际情况选择合适的仿真时间和步长。
结论在Matlab中进行直流电动机机械特性曲线的仿真可以帮助我们更好地了解电机的性能。
通过建立电机模型、设置参数、设计控制器和运行仿真,我们可以得到电机的转速、电流和转矩等重要参数,并绘制出机械特性曲线。
这些结果对于电机的设计和控制具有重要意义。
直流电动机的特性曲线

(3)說明②:
由下式可知,當小負載時,
m 隨 Ia 成正比變化,故轉
矩 T 隨 Ia 的平方成正比,其 轉矩特性曲線為上升的拋物 線;而當負載增加到場磁通 達磁飽和的狀態時,轉矩 T 則隨 Ia 成正比,此時其轉矩 曲線為一上升直線。
轉矩特性曲線
T=K''mIa=K'Ia2(小負載時串激磁場未飽和)
2 n 2 1800
(3)
Tm=
60Pm
2 n
= 60
2
8800≒46.7(牛頓-公尺) 1800
(4) PS=Pm-Po=8800-10×746=1340(瓦特)
節目次
7-2 直流電動機啟動法
1.原理
直流電動機啟動的瞬間,轉速 nST≒0 轉/分,故電樞反電勢
Em(ST)=KnSTm=0 伏特,若代入公式 7-1,可得知電樞啟動
1.他激式直流電動機
(1)原理:
場繞組因由另一直流電源供給,故場磁通 m 等 於由場繞組所產生的磁通 f,且為定值,即不會
隨負載大小變化而改變,如圖中的虛線所示。
電路圖
轉速特性曲線
(2)說明①:
由公式 7-1 可推得下式,即轉速 n 會隨電樞電流
Ia(即負載電流 IL)的增加而些微下降,故實際
Km
Km
故影響直流電動機轉速的因素有下列幾點:
(1)外加電源電壓 Vt。
(2)主磁極的磁通量 m。
(3)電樞電路的電阻壓降 IaRa。
節目次
1.電樞電壓控速法
(1)複壓控速法:係改變電樞兩端的外加電源電壓大小來 控制轉速,當電樞端電壓愈大,轉速就愈快,最近大 多採用倍壓或降壓的電子電路來控速。 圖例
他励直流电动机的机械特性曲线的分析
浅析:他励直流电动机的机械特性在电源电压U 和励磁电路的电阻R f 为常数的条件下,表示电动机的转矩n 和转矩之间的关系n=f (T )曲线,称为机械特性曲线。
利用机械特性和负载转矩特性可以确定拖动系统的稳定转速,在一定条件下还可以利用机械特性和运动方程式分析拖动系统的动态运动情况,如转速、转矩及电流随时间的变化规律。
可见,电动机的机械特性对分析电力拖动系统的启动、调速、制动等运行性能是十分重要的。
下图是他励直流电动机的电路原理图,他励直流电动机的机械特性方程式,可由他励直流电动机的基本方程式导出。
由公式 , 和 导出机械特性方程式 ( 1-1 )他励直流电动机电路原理图当电源电压U =常数,电枢回路总电阻R =常数,励磁磁通F =常数时,电动机的机械特性如下图所示,是一条向下倾斜的直线,这说明加大电动机的负载,会使转速下降。
特性 曲线与纵轴的交点为n 0时的转速,称为理想空载转速。
他励直流电动机的机械特性a a a R I E U+=n E a Φe C =φa T em I C T =emT R U n 2T e e C C C ΦΦ-=Φe 0C U n =实际上,当电动机旋转时,不论有无负载,总存在有一定的空载损耗和相应的空载转矩,而电动机的实际空载转速 将低于n0。
由此可见式(1-1)的右边第二项即表示电动机带负载后的转速降,用 表示,则 ( 1-2 ) 式中 β——机械特性曲线的斜率。
β越大, 越大,机械特性就越“软”,通常称b 大的机械特性为软特性。
一般他励电动机在电枢没有外接电阻时,机械特性都比较“硬”。
机械特性的硬度也可用额定转速调整率△n N%来说明,转速调整率小,则机械特性硬度就高。
电动机的机械特性分为固有机械特性和人为机械特性 。
电机扭矩与转速的关系曲线
电机扭矩与转速的关系曲线
电机扭矩与转速的关系曲线通常被称为扭矩-转速特性曲线,也称为扭矩曲线。
这条曲线描述了电机在不同转速下所提供的扭矩大小。
一般情况下,电机的扭矩-转速特性曲线可分为以下几个阶段:
1. 起动阶段:在起动阶段,电机的扭矩逐渐增加,转速相应地增加。
这是由于在启动时,电机所提供的启动扭矩较大,以克服静摩擦力和惯性负载的惯性。
在这个阶段,电机的输出扭矩较大,但转速较低。
2. 常规工作区:在电机达到额定转速之后,扭矩逐渐稳定在额定扭矩范围内。
在这个阶段,电机所提供的扭矩与转速呈线性关系。
电机能够稳定地运行在这个工作区,提供所需的功率输出。
3. 功率限制区:在额定转速之后,当负载进一步增加时,电机的转速会逐渐下降。
这是因为电机所提供的扭矩无法克服负载的惯性和摩擦力,从而导致转速下降。
在这个阶段,电机的输出功率受到限制,无法满足过大的负载要求。
4. 过负载区:当负载过重时,电机无法提供足够的扭矩来克服负载,从而导致电机无法继续运转。
在这个阶段,电机的转速下降至零,无法满足负载要求。
总之,电机扭矩与转速的关系曲线反映了电机在不同负载下提供的扭矩变化,从而反映了电机的运行特性和极限。
Matlab模拟直流电动机特性曲线
Matlab模拟直流电动机特性曲线简介本文档旨在介绍如何使用Matlab模拟直流电动机的特性曲线。
直流电动机是一种常见的电动机类型,通过控制电流和电压可以实现不同的运行特性。
通过模拟特性曲线,我们可以更好地了解电动机的性能和工作情况。
准备工作在开始之前,需要确保已安装Matlab软件,并具备基本的Matlab编程知识。
另外,需要了解直流电动机的基本原理和特性。
模拟特性曲线的步骤以下是使用Matlab模拟直流电动机特性曲线的步骤:1. 导入必要的库和数据:首先,在Matlab中导入需要使用的库和电动机的基本参数数据。
2. 定义电动机模型:根据电动机的特性方程,定义电动机的模型,包括转矩方程、速度方程和电流方程。
3. 设置输入条件:根据需要模拟的特性曲线类型,设置输入条件,如电压、负载等。
4. 模拟电动机运行:使用定义的电动机模型和设置的输入条件,通过Matlab进行电动机运行的模拟。
5. 绘制特性曲线:根据模拟结果,使用Matlab的绘图功能,绘制电动机的特性曲线。
注意事项在进行电动机特性曲线的模拟时,需要注意以下事项:- 确保输入的参数和条件与实际电动机相符,以获得准确的模拟结果。
- 选择合适的模拟时间和步长,以保证模拟结果的准确性和稳定性。
- 模拟过程中可能出现的错误和异常情况需要进行处理和排除,以确保模拟的有效性。
结论通过使用Matlab进行直流电动机特性曲线的模拟,我们可以更好地了解电动机的性能和工作情况。
这有助于电动机的设计、优化和控制。
同时,我们还需要注意模拟过程中的参数设置和异常情况处理,以确保模拟结果的准确性和可靠性。
以上是关于如何使用Matlab模拟直流电动机特性曲线的简要介绍,希望对您有所帮助。
如有疑问,请随时与我联系。
直流电动机动态特性曲线Matlab仿真
直流电动机动态特性曲线Matlab仿真1. 引言直流电动机作为一种常见的电动机类型,在许多领域中有着广泛的应用。
本文档旨在通过Matlab仿真,详细分析和研究直流电动机的动态特性曲线。
2. 直流电动机动态特性直流电动机的动态特性是指其转速、转矩等参数随时间变化的关系。
其主要受到输入电压、负载、电枢电流等因素的影响。
3. Matlab仿真本节将介绍如何使用Matlab进行直流电动机动态特性曲线的仿真。
3.1 仿真模型在Matlab/Simulink中,我们可以通过搭建直流电动机模型来进行仿真。
该模型主要包括以下几个部分:电源、电动机本体、负载和测量设备。
3.2 仿真参数设置在进行仿真前,我们需要设置一些参数,如电动机的额定电压、额定电流、额定转速等。
3.3 仿真结果通过仿真,我们可以得到直流电动机的动态特性曲线,包括转速、转矩等参数随时间的变化关系。
4. 结果分析通过对仿真结果的分析,我们可以更深入地了解直流电动机的动态特性,从而为实际应用中的电机控制提供参考。
5. 结论本文档通过Matlab仿真,详细研究了直流电动机的动态特性曲线。
仿真结果可以帮助我们更好地了解直流电动机的动态行为,为实际应用中的电机控制提供理论依据。
参考文献[1] 刘补贴, 张卫东, 余永权. 直流电动机动态特性的研究[J]. 电机与控制学报, 2015, 19(3): 45-50.[2] 陈家骏, 黄辉. 基于Matlab的直流电动机动态特性仿真研究[J]. 机电工程, 2018, 35(2): 62-67.[3] 王宇, 赵志宇, 韩雪梅. 直流电动机动态特性曲线的研究[J]. 电气时代, 2016, 34(10): 63-65.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
•
•
•
•
•
•
电气控制与PLC网络教学资源当前位置: 电气控制与PLC网络教学资源> 学习情境> 项目一货物升降机的继电-接触器控制> 正
文
1.1.3三相异步电动机的工作特性
作者: Admin | 来源:| 点击: 517 | 发布时间: 2007-10-07
异步电动机的转矩特性动画演示
一、三相异步电动机的转矩特性
异步电动机的电磁转矩T是由载流导体在磁场中受电磁力的作用而产生的,它使电动机旋转。
式中U1——定子绕组相电压有效值,单位是伏特(V);
f1——定子电源频率,单位是赫兹(Hz);
s——电动机的转差率;
R2——转子绕组一相电阻,单位是欧姆(Ω);
X20——转子不动时一相感抗,单位是欧姆(Ω);
C——与电机结构有关的比例常数。
为了分析方便,将异步电动机的电磁转矩T代替电动机的输出转矩T2
由于电动机的转子参数R2及X20是一定的,电源频率f1也是一定的,故当电源电压U1一定时,上式即表明异步电动机的电磁转矩T只与转差率s有关,因此可用函数式T=f(s)表示,称为异步电动机的转矩特性,画出其图象则称为转矩特性曲线,如图1-13所示。
图1-13异步电动机的转矩特性曲线
二、异步电动机的机械特性
1.电动机的额定转矩的实用计算式
旋转机械的机械功率等于转矩和转动角速度的乘积,对于电动机而言,就有
P2=T2Ω(1-4)
当电动机的输出转矩T2用牛·米(N·m)作单位,旋转角速度Ω用弧度/秒(rad/s)作单位时,输出功率P2的单位是瓦特。
在电动机中计算转矩时输出功率P2的单位是千瓦(kW),转速n的单位是转/分(r/min),所以可以将计算公式简化,如在额定状态下转矩公式为
式中T N——电动机的额定转矩,单位是牛·米(N·m);
P N——电动机的额定功率,单位是千瓦(kW);
n N——电动机的额定转速,单位是转/分(r/min).
2.异步电动机的机械特性曲线
将异步电动机的转矩特性曲线顺时针转过90度,并把转差率S换成转速n,即得如图1-14所示的曲线,我们称为异步电动机的机械特性曲线,可表示为n=f(T)。
图1-14异步电动机的机械特性曲线
电动机在旋转时,作用在轴上的有两种转矩,一种是电动机产生的电磁转矩T,一种是生产机械作用在轴上的负载转矩T L(其它如摩擦转矩忽略不计),当T=T L时,电动机便以某种相应转速稳定运行;当T>T L时,电动机则提高转速;当T<T L时,电动机将降低转速。
3.异步电动机的机械特性参数
(1)额定转矩额定转矩T N是指电动机在额定状态下工作时,轴上输出的最大允许转矩。
电动机的额定转矩可根据电动机铭牌的额定功率和额定转速用(1-5)式来求得。
(2)最大转矩与过载系数
电动机的额定转矩应小于最大转矩Tm,而且不许太接近Tm,否则,电动机略一过载,电动机便停转,因此,一般电动机的额定转矩较最大转矩小得多。
把最大转矩与额定转矩的比
值称作过载系数λ,它是表示电动机过载能力的一个参数。
其表达式为
(3)起动转矩与起动能力电动机的起动转矩Tst是指电动机刚起动瞬间(n=0,s=1)的转矩。
起动转矩与额定转矩之比可表示起动能力,用起动转矩倍数来表示,是标明异步电动机起动性能的重要指标。
空载或轻载起动的电动机,起动能力为1~1.8,一般的电动机起动能力为1.5~2.4,在重负荷下起动的电动机,要求有大的起动转矩,故起动能力可达2.6~3。
Copyright © 2008 电气控制与PLC网络教学资源. 技术支持:蔡开立。