6自由度船舶运动模拟系统
船舶运动控制系统的建模与优化设计

船舶运动控制系统的建模与优化设计船舶运动控制系统是现代船舶自主导航的核心,其设计与优化对于船舶的安全性、航行效率、能耗等方面具有至关重要的作用。
本文将分别就船舶运动控制系统建模和优化设计两个方面进行探讨。
一、船舶运动控制系统建模船舶运动控制系统一般包括自动舵控系统和主机电控系统,二者在船舶航行中协同作用,保证船舶运动的稳定性和效率。
在进行船舶运动控制系统建模时,需要考虑船舶的船型、物理特性、环境因素等多个因素的影响。
1. 船舶运动模型船舶运动模型是船舶运动控制系统建模的基础,其模拟船舶在水中运动时的运动规律,根据不同的需要可建立包括六自由度运动模型、航迹追踪模型、动力学模型等。
其中,六自由度运动模型能够有效地描述船舶在海上的运动状态,包括横向剪切、姿态、滚转、俯仰等关键参数。
2. 自动舵控系统模型自动舵控系统模型用于描述自动舵控系统的工作原理和控制方法,其中自动舵的控制算法是关键。
常见的自动舵控制算法有PID控制、模糊控制、神经网络控制等。
3. 主机电控系统模型主机电控系统模型主要描述主机如何控制船舶的行进速度和方向,其关键要素是主机故障诊断、主机的动力学模型等。
同时,还需要对主机控制系统的回路进行建模、仿真。
二、船舶运动控制系统优化设计针对船舶运动控制系统的优化设计,主要关注船舶的航速、油耗、航迹精度等指标,同时还需控制船舶的纵横摇、螺旋桨汽蚀等不良因素。
1. 控制自动舵的响应速度自动舵的响应速度关系到船舶的稳定性,对其进行优化设计是提高船舶自主导航能力的关键之一。
具体做法包括调整舵机命令滤波时间常数、确定船舶航向的导引器位置、提高陀螺罗盘的稳定性等。
2. 优化主机控制策略合理的主机控制策略可以降低船舶的油耗、提高船速等指标,适当减小主机转速波动、改进主机排放等措施可以提高主机的控制精度。
3. 选用无侵入式传感器技术无侵入式传感器技术可以测量船舶关键参数,如船体振动、流场状态等,对船舶运动控制系统的优化设计具有重要的作用。
船模六自由度运动量的接触式测量

船模六自由度运动量的接触式测量孟祥玮;高学平【摘要】在系泊船模在波浪中的运动水工模型试验中,设计了一种试验测量仪器.该仪器可用于测量波浪作用下系泊船模的六自由度运动量.将6支拉绳式位移传感器固定在船模上方,每个传感器的拉绳均与下方的船模固定.船模晃动时会带动6根拉绳.根据6根拉绳长度变化和前一时刻船模的姿态,可以计算出船模运动的六自由度运动量.经波浪试验表明,该仪器可以很好地反应系泊船模的六自由度运动量,达到了预期的目的.【期刊名称】《船舶力学》【年(卷),期】2010(014)004【总页数】6页(P379-384)【关键词】船模;波浪;六自由度;模型试验【作者】孟祥玮;高学平【作者单位】天津大学建筑工程学院,天津,300072;交通部天津水运工程科学研究院,天津,300456;天津大学建筑工程学院,天津,300072【正文语种】中文【中图分类】U661.73船舶在波浪中会发生摇荡。
假设船舶为刚体,那么船舶在波浪作用下的运动可以分解成绕船上直角坐标系 X、Y、Z 轴的转角θ、ψ、φ 和沿 X、Y、Z 轴的位移 x、y、z,即船舶的六自由度运动量(θ、ψ、φ、x、y、z)。
分别称为横摇、纵摇、首摇以及纵荡、横荡、垂荡[1],详见图 1。
系泊船舶在码头前沿的六自由度运动量是船舶耐波性研究的重要内容,对于码头结构设计、码头作业天数确定等具有重要意义。
近年来随着我国港口事业发展,波浪模型试验中越来越重视船舶六自由度运动量的测量。
水工模型试验中,系泊船舶的六自由度运动量测量方法主要有摄像测量[2]、利用加速度传感器测量以及通过机械装置测量。
摄像测量方法属于非接触测量,对船模运动干扰较小,但是测量系统受环境光线影响较大。
加速度传感器测量主要是测量船模的3个转角和3个运动加速度,再通过积分计算速度和位移,在计算位移时避免不了累计误差。
机械装置测量有通过船模带动一套精密加工的运动系统进行测量的方法,精度较高,缺点是设备加工制作比较麻烦。
船舶六自由度操纵-摇荡耦合运动的数学建模与分析
1
船舶运动坐标系
为了定量描述船舶的操纵运动和摇荡运动,建立
ห้องสมุดไป่ตู้
0
引 言
船舶在航行过程中会产生 6 个方向的自由度。这
动和摇荡运动分开建模分析,其研究成果不能真实表 现船舶的实时运动状态 [2] 。在研究操纵运动时,假设 船舶在静水条件下航行,通过操控方向舵使船舶运动 来研究其响应特性。在研究摇荡运动时,假设船舶在 风浪中直线匀速运动时,研究船舶对风浪的响应性 能。在实际航行过程中,静水环境和匀速直线运动难 以保证,因此将操纵运动和摇荡运动分开研究具有局 限性。将操纵运动和摇荡运动相耦合再进行分析,才 能真实地反映船舶运动情况。 船舶的运动分析模型大致可分为水动力模型和基 于运动响应模型。水动力模型以动力学定律为基础, 建立船舶运动状态和船舶作用力的关系模型。基于运 动响应模型通过实验获取操纵性能和船舶运动状态之
映船舶的实际运动状态。针对这一问题,本文建立了六自由度的船舶操纵 -摇荡耦合运动的数学模型。建立了 2 种船 舶运动坐标系,并推导 2 种坐标系之间的转化关系。此外,在设计船舶运动仿真计算流程的基础上,利用 MMG 分 离模型分别建立船体、螺旋桨、舵的动力学数学模型,将波浪中的操纵运动和摇荡运动结合起来。
收稿日期 : 2017 – 08 – 22 作者简介 : 乐志峰 (1980 – ) ,男,硕士,讲师,研究方向为计算数学。
第 39 卷
乐志峰:船舶六自由度操纵 -摇荡耦合运动的数学建模与分析
· 11 ·
间的关系,再根据这种关系建立运动模型。本文主要 通过建立水动力模型来分析操纵 -摇荡耦合运动。
第 39 卷 第 10A 期 2017 年 10 月
舰 船 科 学 技 术 SHIP SCIENCE AND TECHNOLOGY
船舶拖航系统六自由度操纵运动仿真

船舶拖航系统六自由度操纵运动仿真船舶拖航系统六自由度操纵运动仿真船舶拖航系统是一种重要的海上运输设备,在海上货物运输中起到了非常关键的作用,而如何提高船舶拖航系统的操控能力是当前研究的热点。
船舶拖航系统的操纵运动仿真是一种非常有效的工具,可以模拟出各种不同的船舶拖航运动,对于提高系统的操纵能力具有重要意义。
船舶拖航系统的六自由度操纵运动是指在三个轴向分别进行平移和旋转的运动。
这六个自由度是:横向平移、纵向平移、垂直平移、绕X轴旋转、绕Y轴旋转和绕Z轴旋转。
在实际操作中,船舶拖航系统的操纵运动非常复杂,需要通过软件仿真来模拟出各种不同情况下的运动模式。
实现船舶拖航系统六自由度操纵运动仿真需要使用专业的仿真软件,如MATLAB/Simulink、ADAMS等。
这些软件具有良好的仿真性能和精度,可以精确地模拟出船舶拖航系统的各个运动指标。
以MATLAB/Simulink为例,其基于多体动力学理论,可以对船舶拖航系统进行六自由度动力学仿真,包括运动方程、力学方程和动力学方程等。
在进行船舶拖航系统六自由度操纵运动仿真时,需要考虑各种常见因素,并对其进行参数设置。
通常需要设置船舶的结构参数、物理参数、环境参数和控制参数等,以便精确地进行仿真分析。
其中结构参数包括船舶的长、宽、高等尺寸信息;物理参数包括船舶的质量、重心、惯性矩等;环境参数包括海洋水流、波浪等外部环境影响;控制参数包括船舶的操纵系统和控制策略等。
在仿真系统中,可以使用多种不同的仿真模式,如驱动模式、跟踪模式和预演模式等。
驱动模式是指在实际操纵情况下,通过对船舶各项指令进行控制,模拟出其对应的运动模式。
跟踪模式是指模拟出船舶跟随目标物体进行拖航操作的情况。
预演模式是指在不同环境条件下,模拟出船舶在某些特殊情况下的运动模式,以便用于系统优化和改进等方面。
总之,船舶拖航系统六自由度操纵运动仿真是一种非常重要的技术手段,对于提高船舶拖航系统的操纵能力具有重要意义。
六自由度平台
(一)六自由运动平台介绍六自由度液压平台技术参数六自由度运动平台是由六支油缸,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六只油缸的伸缩运动,完成上平台在空间六个自由度(α,β,γ, X,Y,Z)的运动,从而可以模拟出各种空间运动姿态。
六自由度运动平台涉及到机械、液压、电气、控制、计算机、传感器,空间运动数学模型、实时信号传输处理等一系列高科技领域,因此六自由度运动平台是液压和控制领域水平的标志性象征。
主要包括平台的空间运动机构、空间运动模型、液压系统、控制系统。
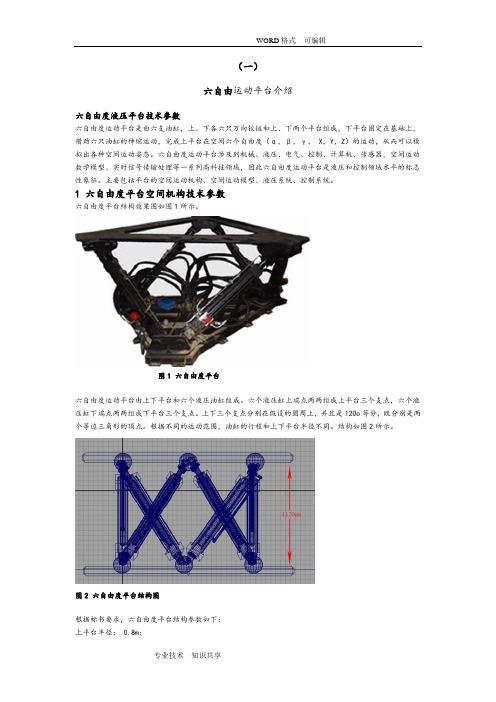
1 六自由度平台空间机构技术参数六自由度平台结构效果图如图1所示。
图1 六自由度平台六自由度运动平台由上下平台和六个液压油缸组成。
六个液压缸上端点两两组成上平台三个支点,六个液压缸下端点两两组成下平台三个支点。
上下三个支点分别在假设的圆周上,并且是120o等分,既分别是两个等边三角形的顶点。
根据不同的运动范围,油缸的行程和上下平台半径不同。
结构如图2所示。
图2 六自由度平台结构图根据标书要求,六自由度平台结构参数如下:上平台半径: 0.8m;下平台半径:0.85m ;油缸最低行程时上下平台垂直距离:约1.17m;油缸行程:±0.20m。
2 六自由度平台空间运动空间运动的目标是实现平台在空间运动的三个姿态角度和三个平动位移,即俯仰、滚转、偏航、上下垂直运动、前后平移和左右平移,及六个姿态的复合运动姿态。
而空间目标是通过六个液压缸的行程实现的,这就需要一个空间的运动模型完成空间运动的转换,假设空间运动的目标俯仰、滚转、偏航、上下垂直位移、前后平移和左右平移用α,β,γ,X,Y,Z表示,六个油缸的行程用L(i)(i=1、2、3、4、5、6)表示。
整个运动模型如下:L(i)=TT(α,β,γ,X,Y,Z)其中,TT是一个空间转换矩阵模型。
由此实时算出每一运动时刻液压油缸的行程。
液压油缸的理论行程再通过D/A接口的转换,给出实际行程值。
船舶动态富余水深DUKC系统简介

: 倾侧量 总富余水深: : 静态吃水变化量
测量误差和 回淤量
速 度 限制 . 尽量 减少 船体 下沉 量 的影 响 。 ( 4 )船 体倾 侧 。船 舶 横倾 将 导致 船 底 富余 水 深 的 减少 ; 当船 舶 转 向时 , 作用 在 船侧 板上 的水 作 用力 作 用 在 船体 重 心 以下 , 使 船体 产生 倾侧 。 船体转 向时倾侧 量 随着 船舶 重 心 的升高 而显 著增 加 ,它与船 舶 横稳 性 高
船舶动态 富余水深 D U KC系统简介
中海散 货 运 输 有 限公 司 张培 超
D U K C系 统 是 指 船 舶 动 态 富余 水 深 的 计 算 系 统 。 为 最大 效率 使 用港 口水深 资源 ,保 障超 限船 舶安 全 和
高效 通 航 ,澳 洲 O MC公 司开发 了此 海上 工 程 软件 , 并
汐 窗 口最 大化 , 并 以此提 高港 口效 率 和安全 。 该 系统 主
要 由港 方 操作 ,船方 只需 提供 相关 资料 或 图纸 .如船 长、 船宽、 型深 、 方 形 系数 、 完 货 时前 中后 吃 水 、 水 线 面
长度、 排 水 量 以及 经 自由液面 修正 后 的横稳 性高 度 等 。
1 船 舶动 态 富余水 深 的计算 原 理
现 在船 艏 , 因此 船艏 下沉 量 即可代 表船 体下沉 量 。 对 于 下 沉 量 的估 算 有 多 种 方 法 ,其 中 比较 安 全 的是 美 国
A r m y C r o p s o f E n g i n e e r s 推荐 的公 式 :
图 中总 富余水 深 为航 道水 深 加潮 高 减 去船 舶 吃水 后 的数 值 。船 底余 量 为 总 富余 水深 减去 船舶 运 动 下沉
基于船舶六自由度运动的船舶航行安全实时监控系统研究

基于船舶六自由度运动的船舶航行安全实时监控系统研究作者:方淡玉黄橙王新辉来源:《数字技术与应用》2013年第06期摘要:随着科学技术的快速发展,船舶工业技术也在进行不断的进步。
船舶航行安全是船舶行业进步的基础,因此,针对船舶航行的安全性进行关键技术的研究是非常有必要的。
本文主要从MMG、ADRC、SVM等技术手段的角度进行考虑,研究出基于船舶六自由度运动的船舶航行安全实时监控系统,以此来解决船舶在航行过程中不能准确测定船舶的航行状态以及不能对船舶合理吃水差进行实时调整的问题,该系统的研究,也是传统的船舶航行安全实时监控技术的一次进步。
关键词:船舶六自由度运动船舶航行实时监控系统研究中图分类号:U664.82 文献标识码:B 文章编号:1007-9416(2013)06-0024-021 系统研究的目的背景随着船舶工业技术的不断发展,国内外对于船舶安全航行方面的研究也越来越多。
然而,目前对船舶的研究主要是针对船位和人身安全,针对船舶航行安全实时监控方面的研究相对来说比较少。
在航行过程中,对船舶六自由度运动实行实时监控能够有效的保障船舶航行的安全,因此,对船舶航行安全实时监控系统进行研究是非常有必要的。
从目前的技术发展水平来看,对水域船舶交通安全监控系统的研究与开发已经取得了非常大的进步,然而,利用船舶的六自由度运动的船舶航行安全系统的研究目前还不成熟。
对船舶航行安全实时监控系统进行研究并开发,可以在航行过程中向该系统返回航行数据,进一步对水中的不稳定性测控技术进行研究,能够在很大程度上避免海上安全事故的发生,为船舶航行的安全提供保障。
船舶在航行过程中可以产生6个自由度的运动,这6个自由度运动即为横荡、纵荡、垂荡、艏摇、横摇、纵摇,而基于船舶六自由度运动的船舶航行安全实时监控系统的研究与开发,对提高水上交通安全有很重要的作用,同时为建立安全的水路交通提高技术支持,利用该系统能够很大程度上避免水上交通事故的发生。
舰船过驳6自由度波浪补偿机器人仿真研究

舰船过驳 6 自由度波浪补偿机器人仿真研究
温兆麟, 陈爱国
( 广州航海高等专科学校 船舶工程学院 , 广东 广州 510725 ) 摘要: 提出一种对舰船过驳进行 6 自由度波浪补偿的机器人 , 对该机器人进行了运动学建模 、 优化设计, 并进行了仿 真。研究结果表明: 该优化的补偿机器人可以实现舰船过驳 6 自由度的波浪补偿, 为舰船过驳波浪运动实现 6 个自 由度的完全补偿提供了可能 。 关 键 词:舰船; 过驳; 波浪运动; 6 自由度 中图分类号:TH701 文献标志码:A 文章编号:1674-0696 ( 2012 ) 05-1091-04
第 31 卷
( 1)
支链在静坐标系中的矢量 L i 为: x O + a11 X Bi + a12 Y Bi - x Ai Li = y O + a21 X Bi + a22 Y Bi - y Ai z O + a31 X Bi + a32 Y Bi
( 2)
2 L i 2 = ( x O + a11 X Bi + a12 Y Bi - x Ai ) + ( y O + a21 X Bi + a22 Y Bi - y Ai ) 2 + ( z O + a31 X Bi + a32 Y Bi ) 2 = 2 2 m2 ( 3) i1 + m i2 + m i3 T x O y O z O] 是动坐标系原点 O 在静坐标系 式中: t = [ 中的矢量表示。 m i1 = ( x O + a11 X Bi + a12 Y Bi - x Ai ) m i2 = ( y O + a21 X Bi + a22 Y Bi - y Ai ) m i3 = ( z O + a31 X Bi + a32 Y Bi ) ( 4) 6 自由度并联机器人的运动学关系为 :