第三章(第1节) 单自由度系统的强迫振动
第三章强迫振动(2011版)
第三章 强迫振动3.1 引言本章讨论.1自由度线性系统在周期激扰作用下的强迫振动,通常称为振系对周期激扰的响应。
周期激扰可以是作用于振系的周期扰力,也可以是振系支座的周期运动。
本章着重讨论正弦型激扰的情形,因为这种情形比较简单。
而所得结论却有很重要的工程应用.任意的周期激扰,都可以通过谐波分析,分解为若干个正弦型激扰,只要分别求份各个正弦型激扰单独引起的振动,然后累加,就可以得到振系对任意周期激扰响应。
叠加原理适用于线性系统,振系由周期激所引起的振动,需要同初始激扰所引起的自由振动相叠加。
才得到振系总的运动。
本章还简略地说明强迫振动理论应用于隔振与侧振等问题;最后提出激扰力与阻尼力在强迫振动各个周期内所做的功,以及各种非线性阻尼的等值粘性阻尼系数的计算方法。
3.2 无阻尼振系在正弦型扰力作用下的振动在自由振动中,作用于振动物体的力只有恢复力与阻尼力,二者都随物体的运动而改变。
现在假定,除上述两种力之外,还有周期改变的外力经常作用于振动物体,力的大小与频率都是由外界条件所决定的,不受物休本身振动的影响。
这种力称为周期的激扰力...或扰力..。
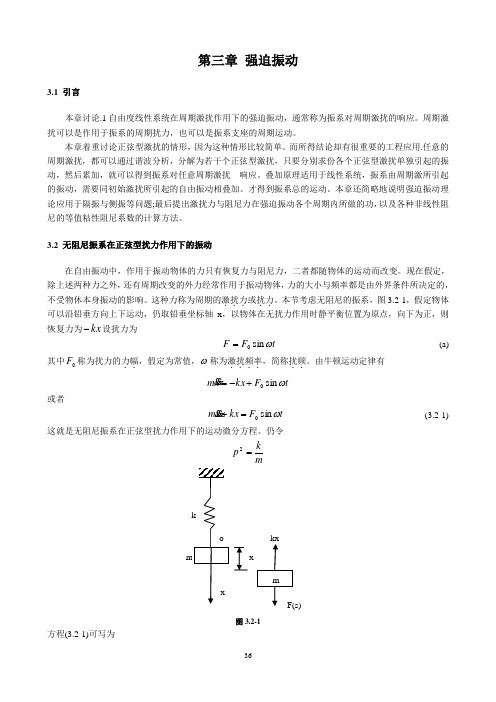
本节考虑无阻尼的振系,图3.2-1,假定物体可以沿铅垂方向上下运动,仍取铅垂坐标轴 x ,以物体在无扰力作用时静平衡位置为原点,向下为正,则恢复力为kx -设扰力为t F F ωsin 0= (a)其中0F 称为扰力的力幅..,假定为常值,ω称为激扰频率....,简称扰频..。
由牛顿运动定律有 t F kx xm ωsin 0+-= 或者t F kx xm ωsin 0=+ (3.2-1) 这就是无阻尼振系在正弦型扰力作用下的运动微分方程。
仍令m k p=2图3.2-1方程(3.2-1)可写为t mF x p xωsin 02=+ (3.2-1)’这是非齐次...的二阶常系教线性常微分方程,它的解由两部分组成,即 21x x x += (b)其中1x 代表方方程(3.2-1)在右端为零时〔即齐次方程(2.2-1)的通解,简称为齐次解...,可以写为方程(2.2-2)或(2.2-5)的形式。
单自由度体系的强迫振动

2)求荷载的频率
2πn 62.83s1
60
3)求动荷因数
Kd
1
2
1
2
1
1 ( 62.83)2
56
3.86
4)求最大竖向位移
ymax
y
W st
Kd
ysFt
Wl 3 48EI
Kd
Fl3 48EI
l3 48EI
(W
Kd
F)
7.26mm
5)求最大应力
max
W st
Kd
F st
l 4WZ
(W
Kd1 ysFt
Wl 3 3EI
K d1
Fl3 3EI
l3 3EI
(W
Kd1F )
7.2 mm
y2max
y
W st
Kd2
ysFt
Wl 3 3EI
Kd2
Fl3 3EI
l3 3EI
(W
Kd2
F)
6.3 5 m m
4)求两种情况中的最大弯矩。最大弯矩发生在固定
端处。最大弯矩由两部分组成:第一部分是由重力引
纯强迫振动任一时刻质点的位移为
y(t)
F
m(2
2
)
sint
F
m2 (1
2 2
)
sint
令
ysFt
F11
F
m 2
y(t)
ysFt
1
1
2 2
sint
最大动位移为
ydmax
ysFt
1
1
2 2
ysFt Kd
式中:Kd——动荷因数,即 K d
ydmax
y
F st
结构力学单自由度体系强迫振动

只能用“万能”解法的情况 1)动载不作用在质点上时的动内力 2)动载不作用在质点上时非质点处的动位移
FP sin t
m
y
FP sin t
m (m 2 A) sin t
(FP m 2 A)sin t
m ( FP )sin t
FP
m
FP sin t
m
y
FP sin t
(m 2 A)sin t
和差化积
sin
sin
2sin
2
cos
2
cos
cos
2cos
2
cos
2
cos
cos
2sin
2
sin
2
三、一般动荷载作用
1. FP (t)是一般动力荷载,特解不易找出。
2.
••
微分方程为:y(t) 2 y
FP t
m
3. 特解可利用瞬时冲量作用下的振动导出。
动量 K mv
m
u
0 FPo sin (t )d
t
0 sin (t )d ]
u
FPo [cos(t u) cost] m 2
yst
2 sin
u
2
sin (t
u) 2
阶段Ⅱ:(13(1t9)≥ u )
FP(t)
FP0
u
阶段Ⅱ: ( t ≥u )
yt
2
yst
s
in
u
2
s
in
t
u 2
yt
m a x
2
FI
3 40
FP
sin
t
FP sinθt
A
EI
结构力学单自由度体系强迫振动

l3 4 EI
A16 FPl3 7 4EI.
3
FFPPssiinnω3 4t t
l
3mm 2
l 2
l
求质点处的最大动位移及最大动弯矩图,EI=常数
l3 4 EI
A1619FPl3 7 48EI .
FI 1298FPsint
FPsint
m
l/ 2
l/ 2
4 EI
3ml 3
求质点m处的最大动位移及最大动弯矩图,EI=常数
0
t<0
FP0
t
FP(t)= FP0 0<t<u
u
0 t> u
.
阶段Ⅰ: ( 0≤t ≤ u ) y(t) = yst (1- cosωt)
FP(t)
yt2yst
sint
2
2
FP0
u
.
阶段Ⅰ: ( 0≤t ≤ u )
yt2yst
sint
2
2
ytmax
2yst
2yst
sinu
2
2
.
U≥T/2 U≤T/2
FP(t)
• m ÿ+ k y = F P(t)
•y•(t)2yFPt
m
.
二、动荷载作用在结构的任意位置
FP(t)
••
m y
m
y
.
• 动位移方程:y(t)(m•y•)11FPt1P
若令等效荷载 FP'tFPt111P 只对质点位移等效
•y•(t)2yFP't 运动微分方程的标准
m 表达式(强迫振动)
2
3
A
l/2
l/2
2l3 3 EI
第三章单自由度系统的简谐激励强迫振动_1
第三章单自由度系统的简谐激励强迫振动第一节导引从本章起,讨论系统由外界持续激励引起的振动,称为强迫振动。
激励按来源分:1.力激励:①直接作用于机械运动部件上的力②有旋转机械或往复运动机械中不平衡质量引起的惯性力2. 支承运动而导致的位移激励、速度激励及加速度激励激励按随时间变化规律分:1. 简谐激励2.周期激励3.任意激励外界激励所引起的系统的振动状态称为响应。
对应于不同的外界激励,系统将具有不同的响应。
系统的响应一般以位移形式表示,称为位移响应。
有时也以速度形式或加速度形式表示,分别称为速度响应或加速度响应。
简谐激励是激励形式中最简单的一种,但掌握系统对于简谐激励的响应的规律,是理解系统对于周期激励或更一般形式激励的响应的基础。
第二节 简谐激励下的响应一、运动方程及其解o sin tω在质量-弹簧-阻尼系统中,质量块上作用有简谐激励力0()sin F t F t ω=其中 0F --- 激励力幅ω --- 激励频率以静平衡位置为坐标原点,建立坐标系。
系统的运动微分方程为0sin mx cx kx F t ω++= (3-1)由高数知,上式是二阶常系数非齐次常微分方程。
该方程的通解()x t 由相应的齐次方程的通解()c x t 和非齐次方程的特解()p x t 两部分组成,即()()()c p x t x t x t =+(1)齐次方程的通解()c x t齐次方程的通解()c x t 对应于有阻尼自由振动的解,在弱阻尼(1ζ<)的情况下为()()()cos sin sin n n t c d d td x te A t B t Aet ζωζωωωωψ--=+=+式中A 和B 为待求常数,由初始条件确定。
(2)非齐次方程的特解()p x t根据高数,非齐次方程的特解()p x t 假设为()sin()p x t X t ωϕ=- (3-4)将()p x t 及其一阶导数、二阶导数代入式(3-1),得20()sin()cos()sin k m X t c X t F tωωϕωωϕω--+-=利用三角公式,将上式右端改写成如下形式0000sin sin[()]cos sin()sin cos()F t F t F t F t ωωϕϕϕωϕϕωϕ=-+=-+-代入上式,得200()sin()cos()cos sin()sin cos()k m X t c X t F t F t ωωϕωωϕϕωϕϕωϕ--+-=-+-比较方程左右两侧sin()t ωϕ-和cos()t ωϕ-的系数,得200()cos sin k m X F c X F ωϕωϕ⎧-=⎨=⎩ 联立求解,得F X =(3-2)2c tg k m ωϕω=- (3-5) (3)方程的通解()x t ()()()()cos sin sin()n c p td d x t x t x t eA tB t X t ζωωωωϕ-=+=++-(3-6)设000,(0),(0)t x x x x ===,将初始条件代入方程(3-6)和它的一次导数,解出A 和B ,再回代入方程(3-6),得000()cos sin n tn d d d x x x t e x t t ζωζωωωω-⎛⎫+=+⎪⎝⎭① sin cos sin cos sin nt n d d d Xe t t ζωζωϕωϕϕωωω-⎛⎫-++⎪⎝⎭② sin()X t ωϕ+- ③这就是初始条件为0x 、0x ,在简谐激励力0sin F ϕ作用下系统的响应(系统的强迫振动)。
第三章单自由度系统的简谐激励强迫振动_1
第三章单自由度系统的简谐激励强迫振动第一节导引从本章起,讨论系统由外界持续激励引起的振动,称为强迫振动。
激励按来源分:1.力激励:①直接作用于机械运动部件上的力②有旋转机械或往复运动机械中不平衡质量引起的惯性力2. 支承运动而导致的位移激励、速度激励及加速度激励激励按随时间变化规律分:1. 简谐激励2.周期激励3.任意激励外界激励所引起的系统的振动状态称为响应。
对应于不同的外界激励,系统将具有不同的响应。
系统的响应一般以位移形式表示,称为位移响应。
有时也以速度形式或加速度形式表示,分别称为速度响应或加速度响应。
简谐激励是激励形式中最简单的一种,但掌握系统对于简谐激励的响应的规律,是理解系统对于周期激励或更一般形式激励的响应的基础。
第二节 简谐激励下的响应一、运动方程及其解o sin tω在质量-弹簧-阻尼系统中,质量块上作用有简谐激励力0()sin F t F t ω=其中 0F --- 激励力幅ω --- 激励频率以静平衡位置为坐标原点,建立坐标系。
系统的运动微分方程为0sin mx cx kx F t ω++= (3-1)由高数知,上式是二阶常系数非齐次常微分方程。
该方程的通解()x t 由相应的齐次方程的通解()c x t 和非齐次方程的特解()p x t 两部分组成,即()()()c p x t x t x t =+(1)齐次方程的通解()c x t齐次方程的通解()c x t 对应于有阻尼自由振动的解,在弱阻尼(1ζ<)的情况下为()()()cos sin sin n n t c d d td x te A t B t Aet ζωζωωωωψ--=+=+式中A 和B 为待求常数,由初始条件确定。
(2)非齐次方程的特解()p x t根据高数,非齐次方程的特解()p x t 假设为()sin()p x t X t ωϕ=- (3-4)将()p x t 及其一阶导数、二阶导数代入式(3-1),得20()sin()cos()sin k m X t c X t F tωωϕωωϕω--+-=利用三角公式,将上式右端改写成如下形式0000sin sin[()]cos sin()sin cos()F t F t F t F t ωωϕϕϕωϕϕωϕ=-+=-+-代入上式,得200()sin()cos()cos sin()sin cos()k m X t c X t F t F t ωωϕωωϕϕωϕϕωϕ--+-=-+-比较方程左右两侧sin()t ωϕ-和cos()t ωϕ-的系数,得200()cos sin k m X F c X F ωϕωϕ⎧-=⎨=⎩ 联立求解,得F X =(3-2)2c tg k m ωϕω=- (3-5) (3)方程的通解()x t ()()()()cos sin sin()n c p td d x t x t x t eA tB t X t ζωωωωϕ-=+=++-(3-6)设000,(0),(0)t x x x x ===,将初始条件代入方程(3-6)和它的一次导数,解出A 和B ,再回代入方程(3-6),得000()cos sin n tn d d d x x x t e x t t ζωζωωωω-⎛⎫+=+⎪⎝⎭① sin cos sin cos sin nt n d d d Xe t t ζωζωϕωϕϕωωω-⎛⎫-++⎪⎝⎭② sin()X t ωϕ+- ③这就是初始条件为0x 、0x ,在简谐激励力0sin F ϕ作用下系统的响应(系统的强迫振动)。
03 第三章 单自由度系统的强迫振动
第三章 单自由度系统的强迫振动
目录 上页 下页 返回 结束
§3.1 简谐激励引起的强迫振动
简谐激振力 P(t) P0 sin t
P0 激振力幅值 激振频率
mx cx kx P0 sin t
令:
2 n
k m
,
2n
c m
x
2n x
n2 x
P0 m
无阻尼系统: 0 0
3、强迫振动稳态响应振幅 B与相位差 只取决于系
统本身的特性(质量m、刚度k、阻尼c)和 激 振 力 的 频
率 、力幅 P0, 与振动的初始条件无关。
初始条件只能影响系统的瞬态振动解。
第三章 单自由度系统的强迫振动
目录 上页 下页 返回 结束
影响稳态响应幅值B的因素:B
自由振动、伴随振动称为瞬态振动,也称为系统的瞬态响应;
第三部分是与简谐激励频率相同、与激励同时存在的简 谐振动,称为稳态振动,也称为系统的稳态响应。
瞬态响应很快衰减为零,只在振动的开始阶段出现, 该阶段称为过渡阶段。
第三章 单自由度系统的强迫振动
目录 上页 下页 返回 结束
本章主要讨论:
系统对简谐激励所引起的系统响应以 及周期激励和任意激励的响应;
第三章 单自由度系统的强迫振动
目录 上页 下页 返回 结束
简谐激励下的强迫振动稳态响应解为:
x2 (t)
B0 sin(t ) (1 2 )2 (2)2
强迫振动稳态响应的基本特点:
1、系统在简谐激励的作用下,其强迫振动稳态响应 是简谐振动,振动的频率与激励频率相同。
2、强迫振动稳态响应的相位比激励的相位滞后 。
B
单自由度系统强迫振动
频率比
相对阻 尼系数
2 2
影响振幅的主要因素:
B0的影响:
它反映了激振力的影响,它相当于将激振力的最大幅值H静止地作 用在弹簧上所引起的弹簧静变形。这说明强迫振动的振幅B与激振力幅值 H成正比。因此,改变振幅的方法之一就是按比例改变激振力的幅值。
的影响:
频率比对振幅的影响可用幅频特性曲线说明
粘滞阻尼力每周所做的功与振 幅的平方成正比,与振动频率 也成正比
将非粘滞阻尼每周做的功表示成:
1.3 简谐激振力引起的强迫振动
1)干摩擦阻尼 干摩擦力一般是常力F,但方向始终与运动方向相反, 当质量从静平衡位置移动到最大偏移位置时,即在1/4周 期内,干摩擦力做功为FB,在以后每1/4周期内都如此。 干摩擦力在一个周期内所做的功:
h
2
p n p 1 2
激振力的幅 值引起的静 变形
2
1
B0 2 2
2 2
静力偏移 相对阻尼系数 频率比
1.3 简谐激振力引起的强迫振动
B
1
B0 2 2
结论:当阻尼大时,带宽就宽,过共振时振幅变化平稳,振幅较小;反 之,当阻尼小时,带宽就窄,过共振时振幅变化较陡,振幅就大。所以, 品质因子反映了系统阻尼的强弱性质和共振峰的陡峭程度。在机械系统 中,为了过共振时比较平稳,希望品质因子小些,带宽宽些。
1.3 简谐激振力引起的强迫振动
相频特性曲线
例1 实验测出了具有粘滞阻尼的单自由系统的固有频率 励作用下发生位移共振的频率 。试求系统的固有频率 c和对数衰减率 。
1.3 简谐激振力引起的强迫振动
1.3 简谐激振力引起的强迫振动
第三章.单自由度系统的强迫振动
k c 其中: , ζ= , ωd = ω0 1−ζ 2 其中: ω0 = m 2ω0m
ω λ = , B= ω0
p0
2 2
(1−λ ) + (2ζλ)
k
2
2ζλ , φ = tg 1− λ2
−1
3 . 3 力激励、位移激励和加速度激励 力激励、
力激励 位移激励 加速度激励
1.力激励:(同前分析) 力激励:(同前分析) :(同前分析
3.1简谐振动下的强迫振动
此时品质因素: 此时品质因素:Q =
ω 1 = 0 2ζ ∆ω
机械阻抗:简谐振动时复数形式的输入与输出之比(位移,速度,加速度) { 机械阻抗:简谐振动时复数形式的输入与输出之比(位移,速度,加速度) 机械导钠:机械阻抗的复数。 机械导钠:机械阻抗的复数。 位移导钠和位移阻抗又称为动柔度和动刚度。 位移导钠和位移阻抗又称为动柔度和动刚度。 复频响应函数(频率响应函数) 复频响应函数(频率响应函数)
第三章 单自由系统的强迫振动
3.1 3.2 3.3 3.4 3.5 3.6 简谐振动下的强迫振动(稳定阶段 简谐振动下的强迫振动 稳定阶段) 稳定阶段 强迫振动的过渡过程 力激励,位移激励和加速度激励 力激励 位移激励和加速度激励 振动的隔离 周期激励的响应 任意激励的响应
3.1简谐振动下的强迫振动
mɺɺ+ cx + kx = p sin ωt x ɺ p ɺɺ+ 2ζω0 x +ω x = e jωt ɺ x m 是复数,其特解为: x是复数,其特解为: x = Be jωt
2 0
{
jωt
c = 2ζω0 m k 2 = ω0 m
其中; 其中;B 为复振幅
第三章单自由度系统的强迫振动
简谐激励下的的强迫振动(稳态阶段)
简谐激励是激励形式中最简单的一种,是理解 系统对其他激励的基础
如图所示的弹簧质量系 统中,质量块上作用有 简谐激振力 P=P0sinω t
m x
r
k m P=P0sinω t x
rx
kx
P
2、运动微分方程: 按牛顿第二定律: m cx kx P sin t x 0 按达朗伯原理(动静法): m cx kx P sin t 0 x 0 最后都得到: m cx kx P sin t (1) x 0
得到: 1, 0 ,这时:
P0 1 x sin t 2 k 1
这样,我们就完全确定了特解x2 。
x (B )
P0 Ф
m 2 B t cB
x2 B sin(t )
B P0 (k m ) (c )
2 2
1
x (B)
2
t0
kB
c tg k m 2
得到: 1, ,这时:
2 ( B) x
无阻尼系统对简谐振动的稳态响应,当 w wn 时
P0 1 x sin(t ) 2 k 1
x x1 x2 我们知道,x的前一项代表有阻尼自由振动,
随时间t增加而衰减至消失,称为瞬态振动。而第 二项则代表有阻尼强迫稳态振动。在简谐激振力下, 它是简谐振动,它与激振力有相同频率,其振幅B, 相位差φ 只与系统本身性质、激振力大小、频率有 关,与初始条件无关。初始条件只影响瞬态振动。
〔注1:达朗伯原理:当一个力学 系统运动时,它的任何位置都可 以看作是平衡位置,只要我们在 原动力上再加上惯性力。这样就 可以把任何动力学问题按相当的 静力学问题来处理。〕
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
sin n t
n
k m
2
[sin t
n
sin n t ]
A sin n t sin n t sin t 2 k m n F0
当t=0时,x0= x 0 =0,上式简化为
x sin n t sin t 2 k m n F0
2 2 2
1 (1 ) ( 2 ) 2
2 2 2
(3.1-10) (3.1-11)
1
2
3.1 对简谐激励的响应
关于解的讨论——幅频特性曲线
放大因子与频率比的关系:
◆当频率比 <<1时,放大因子 接近于1,即振幅X几乎与激励 幅值引起的静变形X0差不多。
◆当频率比 >>1时, 趋于零, 振幅可能非常小。
图 3.1-6
3.1 对简谐激励的响应 例题:不平衡质量激发的强迫振动(例3.1-2) 例3.1-2 作为承受简谐激励的一个例子,考虑图3.16所示的不平衡转子激发的振动。两个偏心质量m/2以角 速度 按相反方向转动,这样可以使两个偏心质量激励 的水平分量相互抵消,铅垂分量则相加起来。设转子的 偏心矩为e,机器总质量为M,求系统的响应。 解:系统的振动微分方程为
x X sin( t )
根据方程(3.1-7)的稳态响应的幅值为
X me k
2
1
1
2 n
2 2
2
2
式中 n ,而 响应的相位角
k M
1
。根据方程(3.1-8)的稳态
2
2
tg
1
1
同样响应的幅值也可以变换为
(3.1-4)
3.1 对简谐激励的响应
微分方程的求解
将式(3.1-4)代回式(3.1-3),整理后得
[( k m ) X F 0 cos ] sin( t )
2
( c X F 0 sin ) cos( t ) 0
该方程对于任意时间t都应恒等于零,有
me X M n
2
(1 ) ( 2 )
2 2
2
me M
2
2
2 2
(1 ) ( 2 )
3.1 对简谐激励的响应 例题:不平衡质量激发的强迫振动(例3.1-2) 因而,在这种情况下,无量纲比为
MX me n
2 n x x 2 n y y x
2 n 2 n
3.1 对简谐激励的响应 例题:支承激励引起的强迫振动(例3.1-3) 设支承的位移y与振动系统中的质量m的强迫振动响应x 表示为 y Y cos t y Y sin t 2 x x X sin t x X cos t X sin t 把上面的式子代入振动微分方程得
(M m ) d x dt
2 2
m
d
2 2
( x e sin t ) dx dt
2
dt
c
kx 0
上式可以写成
M c x kx me sin t x
图 3 .1 -6
3.1 对简谐激励的响应 例题:不平衡质量激发的强迫振动(例3.1-2) 设响应为
3.1 对简谐激励的响应
关于解的讨论
频率比; 引入符号: X 0 F0 k 振动系统零频率挠度; X X 0 放大因子。 可以将式(3.1-7)写成无量纲的形式
X X0
tan
n
1 [1 ( / n ) ] [ 2 ( / n )]
2
1 2 1
2
(3.1-15)
X
0 2
X
2
1
F0 c d
(3.1-16)
3.1 对简谐激励的响应
关于解的讨论——相频频特性曲线
相位差与频率比的关系:
◆在<<1的低频范围内,相位 差 0,即响应与激励接近于 同相位。 ◆在 >>1时,相位差 ,即 在高频范围内,响应与激励接 近于反相位。
x x1 x 2
图 3.1-1
在小阻尼情况下,通解x1 为衰减振动,称为瞬态 振动;特解x2 表示系统在简谐激励下产生的强迫 振动,它是一种持续等幅振动,称为稳态振动。
3.1 对简谐激励的响应
微分方程的求解
x 2 X sin( t ) (3.1-2) 设特解为 式中X为强迫振动的振幅,为相位差,是两个 待定常数。 将式(3.1-2)代入式(3.1-1),得
◆ 在 =1 , 即 共 振 时 , 相 位 差 /2,这时 与阻尼大小无关, 这是共振时的一个重要特征。
图 3.1-3
3.1 对简谐激励的响应
关于解的讨论——共振时的响应
再研究当激励频率与系统固有频率n相等(即共振) 时的响应情况。在方程(3.1-1)中,令c=0,=n,有
1
2
2
2
0,
1 2
2
有时,把强迫振动振幅最大时的频率称为共振频率, 也可以把振动系统以最大振幅进行振动的现象称为共振。 据此,放大因子与振幅为(振幅最大时)
1
1 1 2
2
2
4
2
1 2
2
1 2
2
1 2
3.1 对简谐激励的响应 微分方程及解的形式
如图3.1-1所示的二阶线性有 阻尼的弹簧-质量系统。这一系 统的运动微分方程为 m c x kx F ( t ) F 0 sin t (3.1-1) x 这个单自由度强迫振动微分方程 的全部解包括两部分。一是通解 x1,二是特解x2,即
( k m ) X sin( t ) c X cos( t ) F 0 sin t
2
(3.1-3) 为了便于比较,把上式右端的F0sint改写如下
F 0 sin t F 0 sin[( t ) ] F0 cos sin t F0 sin cos( t )
3.1 对简谐激励的响应
例题:无阻尼强迫振动微分方程(例3.1-1) 共振现象是工程中需要研究的重要课题,工程中通 常取0.75<<1.25的区间为共振区,在共振区内振动都很 强烈,会导致机器或结构的过大变形而造成破坏,但同 样可以利用振动为人类服务。 例 3.1-1 在 一 弹 簧 - 质 量 系 统 上 作 用 一 简 谐 力 F F 0 sin t , 如 图 3.1-5 所 示 。 初 始 瞬 时 x x(0)=x0, 0 x 0 ,试求系统的响应。 解:系统的振动微分方程为 m kx F 0 sin t x 其解为 F0 x A1 cos n t A 2 sin n t sin t 2 k m 式中A1和A2是由初始条件确定的常数。 图 3.1-5
3.1 对简谐激励的响应 例题:无阻尼强迫振动微分方程(例3.1-1) 强迫振动的初始阶段的解由三部分组成: ★第一项是初始条件产生的自由振动; ★第二项是简谐激励产生的强迫振动; ★第三项是不论初始条件如何都伴随强迫振动而产 生的自由振动。同时,系统中不可避免地存在着阻尼, 自由振动将不断的衰减。 在有阻尼的情况下,后一种自由振动在一段时间内 逐渐衰减,系统的振动逐渐变成稳态振动,如图3.1-6所 示。
图 3.1-2
◆当激励频率与振动系统频率 很接近时,即≈1时,定义为共 振,强迫振动的振幅可能很大, 比X0 大很多倍,唯一的限制因 素是阻尼。
3.1 对简谐激励的响应
关于解的讨论——共振 由式(3.1-10)可见,在=1时,有
X
1 2 X0
2 F0 c n
(3.1-12)
(3.1-13) (3.1-14)
X F0 k
1
tg
n
2 2
2 n
2
2
(3.1-7)
2 n 1 n
(3.1-8)
式中
2 n
k m
,
c cc
, cc 2 m n 。
得特解为
x2
F0 k 1 2 n n
( k m ) X F 0 cos
2
c X F 0 sin
由此可得
X
F0
k m
tg c
2 2
c
2
2
(3.1-5) (3.1-6)
k m
3.1 对简谐激励的响应
微分方程的求解 为了便于进一步讨论,把式(3.1-5)与 式(3.1-6)的分子分母同除以k,得如下变化形式
m kx F 0 sin t x
(3.1-17)
根据微分方程理论可知: 当=n时,微分方程(3.1-17)的 特解为
x t cos t t sin t 2m 2m 2 F0 F0
图 3.1-4
பைடு நூலகம்
(3.1-18)
这就说明在共振时,如无阻尼,振幅将随时间无限 地增大,如图3.1-4所示。
2 2 2
s in t
(3.1-9)
这就是在简谐激励作用下系统的位移响应。
3.1 对简谐激励的响应
可以看出强迫振动的一些带有普遍性质的特点:
(1) 在简谐激励作用下,强迫振动是简谐振动, 振动的频率与激励频率 相同,但稳态响应的相 位滞后于激励相位。 (2) 强迫振动的振幅X和相位差都只决定于系统 本身的物理性质和激励的大小与频率,与初始条 件无关。初始条件只影响系统的瞬态振动。 (3) 强迫振动振幅的大小在工程实际问题中具有 重要意义。如果振幅超过允许的限度,构件中会 产生过大的交变应力,而导致疲劳破坏,或者影 响机器及仪表的精度。