第三章-4-状态方程的解
热工基础课后答案第三章

第三章 习 题3-1 解:设定熵压缩过程的终态参数为222S T p 和、,而定温压缩过程的终态参数为222S T p '''和、,根据给定的条件可知: 1222T T p p ='='; 又因为两个终态的熵差为S ∆,固有:21222222lnlnlnT T Mcp p mRT T mc S S S pgp='-'=-'=∆所以有:)exp(12pmCS T T ∆-=对于定熵压缩过程有:kkkkT p T p 212111--=所以:)exp()exp(])1(exp[()(11112112gpk kmR S p mRS M p mck S k p T T p p ∆-=∆-=-∆==-3-2解:设气体的初态参数为1111m T V p 和、、,阀门开启时气体的参数为2222m T V p 和、、,阀门重新关闭时气体的参数为3333m T V p 和、、,考虑到刚性容器有:321V V V ==,且21m m =。
⑴当阀门开启时,贮气筒内压力达到51075.8⨯Pa ,所以此时筒内温度和气体质量分别为:K 25366.78.752931212=⨯==p p T Tkg T R V p m m 0.2252932870.02710751g 1121=⨯⨯⨯===⑵阀门重新关闭时,筒内气体压力降为 5104.8⨯Pa ,且筒内空气温度在排气过程中保持不变,所以此时筒内气体质量为: kg T R V p T R V p m g g 216.025.366287027.0104.852333333=⨯⨯⨯==所以,因加热失掉的空气质量为:kg m 0.0090.2160.225m m Δ32=-=-=3-3 解:⑴气体可以看作是理想气体,理想气体的内能是温度的单值函数,选取绝热气缸内的两部分气体共同作为热力学系统,在过程中,由于气缸绝热,系统和外界没有热量交换,同时气缸是刚性的,系统对外作功为零,故过程中系统的内能不变,而系统的初温为30℃,所以平衡时系统的温度仍为30℃。
现代控制理论-状态方程的解

3、复频域上
非齐次状态方程的解
2、说明
e At 状态转移矩阵
一般用 t 表示,即 t e At
考虑初始条件拉氏变换
sX ( s ) X (0 ) AX ( s ) BU ( s ) 有 ( sI A) 1 X ( s ) X ( 0 ) BU ( s ) 即 1 X ( s ) ( sI A) X (0) ( sI A) 1 BU ( s ) 则
e
d At e Ae At e At A dt
At 1
e At
[5]、对于 n n的方阵 A、 B 当且仅当 AB BA时 有 e At e Bt e( A B)t , 而当AB BA, e At e Bt e( A B)t。
电气工程学院
几个特殊的矩阵指数eAt
设单变量系统的差分方程为:
y(k n) an1 y(k n 1) a0 y(k ) bnu(k n) bn1u(k n 1) b0u(k )
相应的系统脉冲传递函数为
bn z n bn 1 z n 1 b1 z b0 G( z ) n z an 1 z n 1 a1 z a0
有
d At At AX ] e X e [X dt e At Bu(t )
考虑初始条件 拉氏变换得 sX ( s ) X ( 0 ) AX ( s )
将上式积分有 t t X (t ) 1 ( sI A) 1 X (0) A d A e Bu( ) d d e X ( ) 0 0 d 1 显然 e At 1 t ( sI A) At A X ( 0 ) e X ( t ) e 可得 At Bu( )d
状态空间表达式的解

2020/6/4
***状态转移矩阵的基本性质**** 性质1:组合性质
e A e A t e A ( t ) ( t) () ( t )
性质2: e A ( t t) e 0 I ( t t ) ( t ) ( t ) I
性质3: 转移矩阵的逆意味着时间的逆转
e A 1 t e A t ( t) 1 ( t)
【例2-8】求下列状态方程在单位阶跃函数作用下的输出:
解:根据上面的式子
其中
, K=1
2020/6/4
在例2-6中已求的:
2020/6/4
其状态轨迹图可以MABLAB方便地绘出,如图所示: %Example Example 2-8 grid; xlabel('时间轴'); ylabel('x代表x1,----*代表x2'); t=0:0.1:10; x1=0.5-exp(-t)+0.5*exp(-2*t); x2=exp(-t)-exp(-2*t); plot(t,x1,'x',t,x2,'*') end
两边同时在
区间积分,得:
两边同时左乘 即:
并整理得:
2020/6/4
当初始时刻为t0=0时,初始状态x(t0)=x(0)时,其解为:
x (t) (t)x (0 ) 0 t (t )B() u d ,
当初始时刻为t0时,初始状态x(t0)时,其解为:
t
x (t) (t t0)x (t0 )t0 (t)B ()u d
1 t
1 t 2 ... 2!
(n
1 - 1)!
t
n1
0
1
t
...
(n
1 - 2)!
现代控制理论习题解答(第三章)
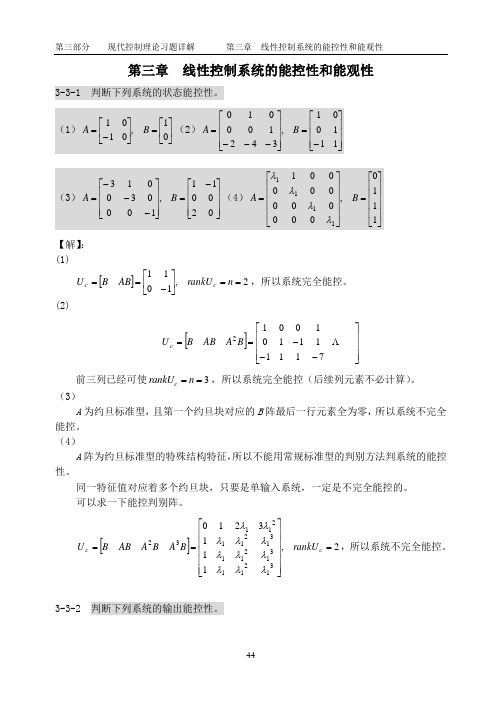
第三章 线性控制系统的能控性和能观性3-3-1 判断下列系统的状态能控性。
(1)⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡-=01,0101B A (2)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=111001,342100010B A (3)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=020011,100030013B A (4)⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=1110,0000000011111B A λλλλ 【解】:(1)[]2,1011==⎥⎦⎤⎢⎣⎡-==n rankU AB BU c c ,所以系统完全能控。
(2)[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---==7111111010012B A ABBU c 前三列已经可使3==n rankU c ,所以系统完全能控(后续列元素不必计算)。
(3)A 为约旦标准型,且第一个约旦块对应的B 阵最后一行元素全为零,所以系统不完全能控。
(4)A 阵为约旦标准型的特殊结构特征,所以不能用常规标准型的判别方法判系统的能控性。
同一特征值对应着多个约旦块,只要是单输入系统,一定是不完全能控的。
可以求一下能控判别阵。
[]2,111321031211312113121121132=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡==c c rankU B A BA AB BU λλλλλλλλλλλ,所以系统不完全能控。
3-3-2 判断下列系统的输出能控性。
(1) ⎪⎪⎪⎩⎪⎪⎪⎨⎧⎥⎦⎤⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=xy u x x 011101020011100030013 (2) []⎪⎪⎩⎪⎪⎨⎧=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=x y u x x 0011006116100010【解】: (1)已知⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=020011,100030013B A ,⎥⎦⎤⎢⎣⎡-=011101C ,⎥⎦⎤⎢⎣⎡=0000D []⎥⎦⎤⎢⎣⎡--=111300002B CA CAB CB D前两列已经使[]22==m B CA CAB CB D rank ,所以系统输出能控。
线性系统理论-郑大钟(3-4章)

1
2 n
n 1 n
t e n
1
0 1
21
n 1 2
(n 1)1 (n 1)(n 2) n 3 1 2! n2 (n 1)1 n 1 1 1
矩阵指数函数的算法 1:定义法
e At I At
1 2 2 A t 2!
只能得到eAt的数值结果,难以获得eAt解析表达式,但用计算机计算,具 有编程简单和算法迭代的优点。 2:特征值法
A P 1 AP
A PA P 1
e At Pe A t P 1
P为变换A为约当规范型的变换矩阵 1)若A的特征值为两两互异
如果系统矩阵A(t),B(t)的所有元在时间定义区间[t0,tα]上为时间t的连续实函数,输 入u(t)的所有元为时间t的连续实函数,那么状态方程的解x(t)存在且唯一。 从数学观点,上述条件可减弱为: ①系统矩阵A(t)的各个元aij(t)在时间区间[t0,tα]上为绝对可积,即:
t
t0
| aij (t ) | dt ,
-1
te1t 1t e e3t
0 2tet e 2t 1 3tet 2et 2e 2t 2 tet et e 2t
e At 0 I 1 A 2 A2 (2tet e 2t ) I (3tet 2et 2e 2t ) A (tet et e 2t ) A2 2et e 2t 0 e t e 2t 0 et 0 2et 2e 2t 0 et 2e 2t
s3 ( s 1)( s 2) 2 ( s 1)( s 2)
第三章系统分析-状态方程的解
1.非齐次方程解的通式
已知系统状态空间表达式为: • 直接法积分求解
Ax Bu x y Cx Du
x(t ) (t t 0 ) x(t 0 ) (t )Bu( )d
t0
t
t0 0
x(t ) (t ) x(0) (t )Bu( )d
k j 0 k 1
得系统状态的迭代计算式为:
x(k ) G x(0) G k j 1Hu( j )
k j 0
k 1
注:计算结果为逐点形式,便于计算机运算,但有累积误差。
与连续状态方程的求解公式在形式上类似
(2) z 变换法
x(k 1) Gx(k ) Hu(k ) zx( z ) zx(0) Gx( z ) Hu( z ) ( zI G) x( z ) zx(0) Hu( z ) x( z ) [( zI G) z ]x(0) ( zI G) Hu( z ) x(k ) Z 1[( zI G) 1 z ]x(0) Z 1[( zI G) 1 Hu( z )]
书上p58~60页
0 (4)T-1AT= 0 0
1
0 0
0 1
0
0 1 t t 0 At 为约旦阵,则 (t ) e e T 0 1 1 0 0 0 0
At
1 2 t 2! t 1 0
1 3 t 3! 1 2 1 t T 2! t 1
返回
(8) 若 Ann Bnn Bnn Ann ,则有
注:上述性质由定义导出。
1 2 2 1 i i x(t ) ( I At A t A t ) x(0) e At x(0) 2! i!
线性系统理论第三章
为约旦标准型
J1 0
A
P 1AP
0
J2
0 A PAP 1
0
0
0
J
n
i 1
Ji
0
i
0
0
0
1
i nini
, eJit
如何计算矩阵指数函数 eAt ?
§3.2 矩阵指数函数的计算
Linear system theory
1. 拉普拉斯变换方法:
eAt I
At
1
A2t 2
2!
两边取拉普拉斯变换,有
1 Ak t k
k0 k !
L
e At
L
I
At
1 2!
A2t
2
1 s
I
1 s2
A
1 s3
A2
另外一方面,有
exp[(M 1AM )t] M 1eAt M = exp[(M 1AM )t]
(M 1AM )k t k
M 1 Ak M t k
M 1(
Ak t k )M = M 1eAt M
k 0
k ! k0
k!
k0 k !
§3.1 状态方程的解
Linear system theory
3. 强迫运动: 当 u(t) 0,给定
t2 )
A2
(
t12 2!
t1t2
t22 ) 2!
A3 (t13 3!
t12t2 2!
t1t22 2!
t23 ) 3!
Ak ( t1k
t1k 1t2
t1k
t2 2 2
k ! (k 1)! (k 2)!
t12t2k2 t1t2k2 t2k ) = e A(t1t2 ) 2!(k 2)! (k 1)! k !
数字逻辑课后答案 第三章

第三章 时序逻辑1.写出触发器的次态方程,并根据已给波形画出输出 Q 的波形。
解:2. 说明由RS 触发器组成的防抖动电路的工作原理,画出对应输入输出波形解:3. 已知JK 信号如图,请画出负边沿JK 触发器的输出波形(设触发器的初态为0)1)(1=+++=+c b a Qa cb Q nn4. 写出下图所示个触发器次态方程,指出CP 脉冲到来时,触发器置“1”的条件。
解:(1),若使触发器置“1”,则A 、B 取值相异。
(2),若使触发器置“1”,则A 、B 、C 、D 取值为奇数个1。
5.写出各触发器的次态方程,并按所给的CP 信号,画出各触发器的输出波形(设初态为0)解:6. 设计实现8位数据的串行→并行转换器。
B A B A D +=DC B A K J ⊕⊕⊕==Q AQ B Q D Q C Q E Q F Q7. 分析下图所示同步计数电路解:先写出激励方程,然后求得状态方程状态图如下:该计数器是五进制计数器,可以自启动。
8. 作出状态转移表和状态图,确定其输出序列。
解:求得状态方程如下故输出序列为:000119. 用D 触发器构成按循环码(000→001→011→111→101→100→000)规律工作的六进制同步计数器解:先列出真值表,然后求得激励方程PS NS 输出N0 0 0 0 0 1 00 0 1 0 1 1 0 0 1 1 1 1 1 0 1 1 1 1 0 1 0 1 0 1 1 0 0 0 1 0 0 0 0 0 1化简得:逻辑电路图如下:n Q 2n Q 1n Q 012+n Q 11+n Q 10+n Q n n n nn n n n n n nnQ Q Q Q Q Q Q Q Q Q Q Q Z 121002*********+==+==+++nnn nnn nnnn QQ Q D QQ Q D QQ Q Q D 121211121122+====+==+++10. 用D 触发器设计3位二进制加法计数器,并画出波形图。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0 1 0
,利用方法1求解 exp(At)
0 A3 0 0 1 0 1 0 1 A 0
A
2
0 0 0
1 0 1
及 及
A A3 A5
e
At
( t ) ax ( t ) x
x ( t ) e at x ( 0 )
x (t ) e At x (0 )
n=n
于是
e
At
At (A t)2 (A t)3 (A t)k I 1! 2! 3! k!
其中,A 是方阵,exp[At] 是与 A 具有相同阶数的方阵。实际上,
exp(At ) exp(TT1t ) T exp(t )T1
4) 方法 4-----Cayley-Hamilton 4 Cayley Hamilton 定理
e
A t
exp[
At ]
n 1
k 0
k
(t ) A
k
13
状态方程的解
状态转移矩阵的计算:1) 直接计算
例 1. 假定 A 矩阵为 解:
6) 对于 nn 方阵 A 和 B,如果有 AB=BA,则
exp( A t ) exp( B t ) exp[( A B ) t ]
7) ) 对于任意非奇异矩阵 T,有
(T 1ATt ) 2 (T 1AT ) 2 t 2 (T 1 AT )(T 1 AT )t 2 2! 2! 2!
状态方程的解
状态转移矩阵的计算
对于给定的矩阵 A,计算 STM 闭合形式的方法包括:
1) 方法 1----1 直接计算
e
At
( A t)2 ( A t)3 ( A t)k At I 1! 2! 3! k!
2) 方法 2----- 利用拉普拉斯变换
( t ) e A t L 1 [( sI A ) 1 ]
e
at t
x ( t ) e at x ( 0 )
at ( at ) 2 ( at ) 3 ( at ) k 1 1! 2! 3! k!
[请复习幂级数ex的展开(- <x<)]
求解 S 域内的解,有
( t ) ax ( t ) x
LT
sX ( s ) x ( 0 ) aX ( s )
( t ) ax ( t ) x
x ( t ) e at x ( 0 )
假定初始时刻为 t0,对于任意初始条件 x(t ( 0),如果 x(t ( 0) 已知,则有
x ( t ) e a (t t0 ) x ( t 0 )
6
状态方程的解
状态转移矩阵
• 考察标量方程的解 其中 其中,
4
u1 u2 um
S
x1, x2, …, xn
y1 y2 yl
图 3.11 系统的一般表示
状态方程的解
状 方程 状态方程
微分方程是输入输出模型,它仅仅表示了输入变量与输出变量之间的 关系。 -----经典控制理论模型 状态空间模型可以描述系统的内部变量,能够描述多变量系统和非线 性系统,并易于计算机实现。 -----现代控制理论模型 状态变量分析方法的特点是将一个复杂系统分解为一组更小的系统, 通过标准化处理使这些小系统之间的相互影响最小,从而可以进行分 别求解 别求解。
exp( T
1
AT t ) T
1
exp( A t )T
性质 1)、2)、4)、6)、7) 可以由 e At 的定义直接证明。
10
e
At
At ( At ) 2状态方程的解 ( At ) 3 ( At ) k ( At ) k I 1! 2! 3! k! k! k 0
x ( t ) L 1 [( s a ) 1 ] x ( 0 )
比较通过不同方式求得的解,它们应该相等。于是有,
e at L 1 [( s a ) 1 ]
7
状态方程的解
状态转移矩阵
对比标量方程和状态方程,状态方程的解类似于标量方程的解;或
利用拉普拉斯变换求解状态方程 n=1
控制科学与工程学系
状态方程的解
状态方程 状 方程 状态空间模型
(t ) Ax (t ) Bu(t ) 状态方程 x y(t ) Cx (t ) Du
输出方程 状态变量 x(t), u(t), 和 y(t) 是 列向量,A, B, C 和 D 是矩阵, 对于线性时不变系统而言 这 对于线性时不变系统而言,这 些矩阵的元素都是常数。 系统具有 m 个输入,l 个输 出和 n 个状态变量。 为了得到系统输出 y(t),我们首先要 求解状态方程。 状态空间模型图
状态转移矩阵
线性时不变系统 ( t ) e A t
STM:具有相应的物理意义,且 适用于时变系统和离散系统 注意:两者在概念上有区别。
Matrix exponent(矩阵指 数): 数学函数
作为函数, 具有如下性质: e At 具有如下性质
1) 如果 A 是对角阵,则 exp[At] 也是对角阵
9
e
At
At ( At ) 2状态方程的解 ( At ) 3 ( At ) k ( At ) k I 1! 2! 3! k! k! k 0
状态转移矩阵
4) 5)
exp( A t )
t0
I
e A t 总是非奇异矩阵,其逆矩阵为
[exp( [ p( A t )] 1 exp( p( A t )
状态方程的解
自动控制 自动控制理论
第三章 微分方程的解
周立芳 徐正国
浙江大学控制科学与工程学系
1
状态方程的解
第三章要点 绪论 稳态响应 暂态响应 时间常数定义 例:二阶系统 系统的暂态(动态) 时间响应性能指标 状态方程的解
2
状态方程的全解
求解微分方程 • 状态方程 • 状态转移矩阵(State St t transition t iti matrix, t i STM) • 计算状态转移矩阵 • 状态方程的全解 • 从状态空间模型到传递函数(矩阵)
exp[At]是无穷级数,且该无穷级数收敛,具有闭合形式。对于线性 是无穷级数 且该无穷级数收敛 具有闭合形式 对于线性 定常系统,exp[At] 称为系统的状态转移矩阵 (state transition matrix, STM),可记为
…
( t ) Ax ( t ) x
LT
s X ( s ) x ( 0 ) AX ( s )
3) 方法 3-----矩阵 A 对角化
( s ) ( sI A) 1
diag [ 1 , 2 , , n ]
A T T 1 , T 1 AT diag [ 1 , 2 , , n ]
e t diag [ e 1t , e 2 t , , e n t ]
14
1 0 0
状态方程的解
状态转移矩阵的计算:2) 拉普拉斯变换
例 2. 假定 A 矩阵为 解:
( s ) ( sI A ) 1
1 s 0 0 1 1 ( s 2 s 1 1 1 ( 2 s 1 s 1 1 ( 2 s 1 s
x ( t ) L 1 [( s I A ) 1 ] x ( 0 ) ( t ) x ( 0 )
k 0
(A t)k L 1 [( sI A ) 1 ] k!
( t ) e A t exp[ A t ]
8
e
At
A t ( A t ) 2 状态方程的解 ( At ) 3 ( At ) k ( At ) k I 1! 2! 3! k! k! k 0
状态转移矩阵
STM(—状态转移矩阵) 刻画了系统的非强迫响应或自然响应,它具
有如下性质:
1.
(t 2 t1 ) (t1 t 0 ) (t 2 t0 ), 对任意 t 0 , t 1 ,t 2
2.
3.
( t ) ( t ) ( t ) q ( t ) ( qt ), q 是 正 整 数
(t p ) k A e A( t p ) k! k 0
k
性质 5) 证明: 证明
[exp( A t )] 1 exp( A t )
令 p=-t,利用性质 利用性质 3) 可得
exp( A t ) exp( At ) exp( A 0) I
11
状态方程的解
At 1
0 1 0 A 0 0 1 0 1 0
s 0 0 1 s 1 0 1 s
1
, 利用方法 2求解exp(At) p( )
11 adj dj ( sI I A) 1 12 det( sI A ) 13
21 22 23
31 3 32 33
1 ) 1 1 ) 1 1 ) 1
1 1 1 1 ( ) s 1 s 2 s 1 1 1 1 ( ) 2 s 1 s 1 1 1 1 ( ) 2 s 1 s 1
A diag [ 1 , 2 , , n ]
2) d
dtБайду номын сангаас
e At diag [ e 1t , e 2 t , , e n t ]