35 线性离散系统状态方程的解
线性离散系统数学模型和分析方法

线性离散系统数学模型和分析方法目录一、内容简述 (3)二、线性离散系统的数学模型 (3)2.1 离散系统的概念 (5)2.2 离散系统的描述方法 (6)2.2.1 差分方程 (7)2.2.2 马尔可夫过程 (8)2.2.3 状态空间表示 (10)2.3 线性离散系统的特性 (11)2.3.1 稳定性分析 (12)2.3.2 脉冲响应与收敛性 (13)2.3.3 系统性能评估 (14)三、分析方法 (16)3.1 拉普拉斯变换法 (17)3.1.1 基本概念 (19)3.1.2 应用分析 (20)3.1.3 收敛性与应用局限 (21)3.2 状态空间方法 (23)3.2.1 基本理论 (24)3.2.2 控制器设计 (25)3.2.3 参数估计 (26)3.3 Z变换法 (27)3.3.1 基本原理 (28)3.3.2 系统分析 (30)3.3.3 系统的性能评估 (31)3.4 时域分析方法 (33)3.4.1 序贯逼近法 (34)3.4.2 数值仿真 (34)3.4.3 基于数字模型的算法 (36)四、应用实例 (37)4.1 控制系统设计 (39)4.1.1 系统建模 (40)4.1.2 控制器设计与仿真 (42)4.2 信号处理 (43)4.2.1 离散信号处理 (45)4.2.2 滤波器设计 (46)4.3 通信系统 (47)4.3.1 调制与解调 (49)4.3.2 语音编码与加密 (51)五、结论与展望 (52)5.1 研究成果总结 (53)5.2 未来研究方向 (54)5.3 实际应用前景 (55)一、内容简述本文档旨在全面介绍线性离散系统数学模型的构建及其分析方法。
线性离散系统在现代科技、工程和经济学等领域具有广泛的应用,因此对其数学模型的理解和分析显得尤为重要。
我们将从线性离散系统的基本概念出发,详细阐述线性离散系统的定义、特点以及类型。
通过实例演示如何建立线性离散系统的数学模型,包括状态方程、传递函数等基本形式。
现代控制理论经典习题

1、我国人民哪些发明属于在经典控制理论萌芽阶段的发明?(AB)A 指南车B 水运仪象台C 指南针D 印刷术2、经典控制理论也可以称为(BD)A 现代控制理论B 自动控制理论C 近代控制理论D 古典控制理论3、以下哪些内容属于现代控制理论基础的内容?(AB)A 李雅普诺夫稳定性理论B 极小值原理C 频率响应法D 根轨迹法4 、传递函数模型假设模型初值不为零。
(✖)5 、传递函数描述的是单输入单输出的外部描述模型。
(✖)6 、线性系统理论属于现代控制理论的知识体系中数学模型部份。
(✔)7 、最优控制理论属于现代控制理论的知识体系中估计方法部份。
(✖)8、控制科学的意义下,现代控制理论主要研究(数学建模)和(控制理论方法) 的科学问题。
9 、现代控制理论在整个控制理论发展中起到了(承上起下)的作用。
10、除了稳定性外,现代控制理论基础还考虑系统(能控性)和(能观测性)两个内部特性。
一、现代控制理论作为一门科学技术,已经得到了广泛的运用。
你还知道现代控制理论具体应用到哪些具体实际的例子么?1、关于输出方程,下列哪些说法是正确的?(BD)A 输出方程中状态变量必须是一阶的B 输出方程中不含输入的任何阶倒数C 输出方程中输入变量可以是任意阶的D 输出方程中不含状态变量的任何阶倒数2、关于系统的动态方程,下列哪些说法是正确的?(AB)A 系统的状态方程的状态变量的个数是惟一的B 系统输出方程的输入输出变量是惟一的C 系统输出方程的输入输出变量是不惟一的D 系统的状态方程的状态变量是惟一的3、对于一个有多个动态方程表示的系统,下列说法正确的是?(AC)A 这些动态方程一定是等价的B 这些动态方程经过线性变化后,不能转化为一个动态方程C 这些动态方程经过线性变化后,可以转化为一个动态方程D 这些动态方程不一定是等价的4、选取的状态向量是线性相关的(✖)5、状态向量的选取是不惟一的(✔)6、状态向量的个数是不惟一的(✖)7、输出方程的选取是不惟一的(✔)8、(系统的输出量与状态变量、输入变量关系的数学表达式)称为输出方程。
第2章 线性控制系统的状态方程求解
2.1 线性定常系统的齐次状态方程的解
t0 0 时 x(t ) (t ) x(0)
齐次状态方程的求解问题
本节的要求:
状态转移矩阵的计算问题
1、线性定常系统的齐次状态方程解的定义
2、状态转移矩阵
3、解的物理意义
第二章 6
2.2 状态转移矩阵的性质
性质 1: Φ(0) I
证明: Φ(t ) e At I At
证明: xt2 t2 t1 xt1
xt2 t2 t1 t1 t0 xt0
又 x(t2 ) (t2 t0 ) x(t0 )
第二章
x(t1 ) (t1 t0 ) x(t0 )
9
2.2 状态转移矩阵的性质
性质7: [ (t )] (kt )
3 2.5 0.5 P -1 3 4 1 1 1.5 0.5
-t 1 1 1 e 1 2 3 0 1 4 9 0
3 2.5 0.5 3 4 1 -3t e 1 1.5 0.5 0 0 0.5e t e 2t 0.5e 3t 0.5e t 2e 2t 4.5e 3t 0.5e t 4e 2t 4.5e 3t 16
1 k k At k 0 k!
x(t ) e At x(0)
Φ(t ) e At
矩阵指数函数 状态转移矩阵
齐次方程的解: x(t ) (t t0 ) x(t0 )
自由运动的解仅是初始状态的转移, 状态转移矩阵包含了系统自由运动的全部信息, 它唯一决定了系统中各状态变量的自由运动
离散系统的状态空间描述状态方程
上式中:
h0 bn h1 bn1 an1h0 h2 bn 2 an1h1 an 2 h0 hn b0 an1hn1 a1h1 a0 h0
12
2019/1/5
得到一阶差分方程组:
x1 ( k 1) x2 ( k ) h1u( k ) x ( k 1) x ( k ) h u( k ) 2 3 2 x ( k 1) x ( k ) h u( k ) n n1 n1 xn ( k 1) a0 x1 ( k ) a1 x2 ( k ) an1 xn ( k ) hn u( k )
1)差分方程的输入函数中不包含高于一阶的差分项
y( k n) an1 y( k n 1) a1 y( k 1) a0 y( k ) b0u( k )
选择状态变量: x1 ( k ) y( k )
x ( k ) y( k 1) 2 x 3 ( k ) y( k 2 ) xn ( k ) y( k n 1)
求解法同连续时间定常系统的传递函数的实现。
这里仅给出结论:第二能控标准型、第二能观测标准型
2019/1/5
16
1)第二可控标准型
x1 ( k 1) 0 x ( k 1) 0 2 0 x n ( k 1) a0 1 0 0 a1 0 1 0 a2 0 x1 ( k ) 0 x ( k ) 0 0 2 0 x 3 ( k ) u( k ) 0 1 0 a n 1 1 x n ( k )
线性系统状态方程的解
4、 (t1 t2 ) (t1 ) (t2 ) (t2 ) (t1 ) 1 2 代 (t1 +t2 ) I A(t1 t2 ) A (t1 t2 ) 2 可证 2 表明状态转移矩阵可以分解
5、 1 (t ) (t ) 由性质4得, (t t ) (t ) (t ) (t ) (t ) (0) I 求逆: 1 (t ) (t ) 或 1 (t ) (t ) 对 x (t ) (t ) x (0) 两边左乘 1 (t ): 1 (t ) x(t ) x(0) x (0) x (t ), 状态转移可逆 x (t ) x (0) (t ) 1 ( t )
另由(性质6 ) (t2
t0 ) x (t0 )
( t t )
1 0
上式成立
状态分段转移:
x (t1 ) ( t2 t1 ) x (t0 ) x (t2 ) ( t2 t0 )
8、 (t ) (kt )
k
(t ) = (t ) (t )性质4 (t t ) (2t ) (t ) (kt )
2 1 1 2 , A A 1 2 1 2
tet et
1 2 t t e 2 tet
t n 1 t e (n 1)! t n 2 t e (n 2)! t te et
1 L[ ] e- at sa 2et e2t e At L1[( sI A)1 ] 2et 2e2t
sI A1 求。 2.由e L
At 1
(性质1)
第三章 状态方程的解
1 1 0 0
2 1 1
1
0
1
0
2
1
0
2
0
0
7 ) [Φ ( t )] k = Φ ( kt ) 证明: 证明:
[ Φ ( t )] = ( e ) = e
k At k
kAt
=e
A ( kt )
= Φ ( kt )
( A+ B ) t = e At e Bt = e Bt e At AB = BA ,则 e 8) 若
e λ1 t =
e λ2t O
λnt e
(2)
若A为 m × m 约当矩阵
λ A= 1
λ
O O
O O
1 λ m×m
则有: 则有:
e
At
1 t 0 1 λt =e 0
−1 = L− 1 ( sI − A )
变换法计算矩阵指数: 例 用Laplace 变换法计算矩阵指数: 1 0 A= −2 −3
s 解:( sI − A ) = 2 −1 s + 3
( sI − A )
−1
s + 3 1 1 = s (s + 3) + 2 −2 s
s+3 ( s + 1 )( s + 2 ) = −2 ( s + 1 )( s + 2 ) ( s + 1 )( s + 2 ) s ( s + 1)[s + 2 ] 1
1 2 − s +1 s + 2 At −1 则有: 则有: = L e − 2 + 2 s +1 s + 2
离散时间系统状态方程的求解.
或
An1u n 1 Z 1 zI A 1
项决定,即 本λ身n,0 只有当 时,n 式 n(02)才可给出完 整的 之结果λ。n
如果起始时刻选 n0 ,0并将上述对 值的n 限制以阶跃信号
的形式写入表达式,于是有
λ
n
Anλ 0un
零输入解
ni01 An1i Bxiun 1
零状态解
还可解得输出为
yn Cλ n Dxn
CAnλ0un
1 1
d2
d
2
n
1
n
n 1 1n2
2c2
3 2c31
n 1n 2 cn11n3
dm1
d
m1
1
n
n! m 1
!1nm1
m
1!cm1
m
! cm1
m 1!
2!
cm112
n 1! n m!
c nm k 1 1
三.离散系统状态方程的 z 变换解
和连续系统的拉氏变换方法类似,离散系统的 变z换方
零输入解
ni01 CAn1i Bxiun 1 Dxnun
零状态解
由两部分组成:
•一是起始状态经转移后在 n 时刻得到的响应分量;
•另一是对n 1 时刻以前的输入量的响应。它们分别
称为零输入解和零状态解。
其中 An称为离散系统的状态转移矩阵,它与连续系统中
的 e At 含义类似,也用符号 表示,写作n
法也使状态方程的求解显得容易一些。 由离散系统的状态方程和输出方程
λ n 1 Aλ n Bxn
yn
Cλ
n
Dxn
两边取 z 变换
zΛz zλ 0 AΛz BX z Y z CΛz DXz
线性离散系统的数学模型和分析方法
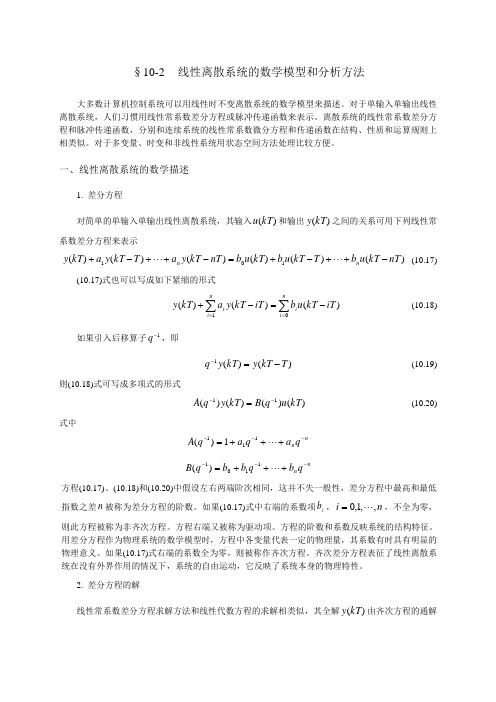
§10-2 线性离散系统的数学模型和分析方法大多数计算机控制系统可以用线性时不变离散系统的数学模型来描述。
对于单输入单输出线性离散系统,人们习惯用线性常系数差分方程或脉冲传递函数来表示。
离散系统的线性常系数差分方程和脉冲传递函数,分别和连续系统的线性常系数微分方程和传递函数在结构、性质和运算规则上相类似。
对于多变量、时变和非线性系统用状态空间方法处理比较方便。
一、线性离散系统的数学描述1. 差分方程对简单的单输入单输出线性离散系统,其输入)(kT u 和输出)(kT y 之间的关系可用下列线性常系数差分方程来表示)()()()()()(101nT kT u b T kT u b kT u b nT kT y a T kT y a kT y n n -++-+=-++-+ (10.17)(10.17)式也可以写成如下紧缩的形式∑∑==-=-+n i ni i i iT kT u b iT kT y a kT y 1)()()( (10.18)如果引入后移算子1-q ,即)()(1T kT y kT y q -=- (10.19)则(10.18)式可写成多项式的形式)()()()(11kT u q B kT y q A --= (10.20)式中n n q a q a q A ---+++= 1111)( n n q b q b b q B ---+++= 1101)(方程(10.17)、(10.18)和(10.20)中假设左右两端阶次相同,这并不失一般性,差分方程中最高和最低指数之差n 被称为差分方程的阶数。
如果(10.17)式中右端的系数项i b ,n i ,,1,0 =,不全为零,则此方程被称为非齐次方程。
方程右端又被称为驱动项。
方程的阶数和系数反映系统的结构特征。
用差分方程作为物理系统的数学模型时,方程中各变量代表一定的物理量,其系数有时具有明显的物理意义。
如果(10.17)式右端的系数全为零,则被称作齐次方程。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
� 上述递推计算公式中的第2项为离散卷积,因此有如下另 一形式的线性离散系统状态方程的解表达式
x(k) = Gkx(0) + Gk−1Hu(0) + ...+ GHu(k - 2) + Hu(k -1)
k −1
∑ = Gkx(0) + G j Hu(k − j −1)
j =0
递推法(3/10)
0
...
Ω λ ⎤ mi −1 k −mi +1 ki
...
Ω λ ⎥ mi −2 k −mi +2
k
i
⎥
...
... ⎥
...
λki
⎥ ⎥⎦
k ≥m
⎡λki Ωk1λik−1 ... 1 ... 0 ⎤
⎢ ⎢
0
λki
...
Ωk1λki −1
...
...
⎥ ⎥
= ⎢ ... ... ... ... ... 1 ⎥
递推法(8/10)
� 下面讨论几种特殊形式的系统矩阵G的状态转移矩阵 (1) 对角线矩阵。 当G为如下对角线矩阵: G=diag{λ1 λ2 … λn} 则状态转移矩阵为
{ } Φ(k ) = Gk = diag λ1k λk2 ... λkn
(2) 块对角矩阵。 当G为如下块对角矩阵: G=block-diag{G1 G2 … Gl}
⎧Φ(k + 1 , k0 ) = G(k)Φ(k , k0 ) ⎨⎩Φ(k0 , k0 ) = I
Φ(k , k0 ) = G(k −1)G(k − 2)...G(k0) , k > k0
x(k
)
=
⎡1⎤ ⎢⎣−1⎥⎦,
⎡0⎤ ⎢⎣1.84⎥⎦,
⎡ 2.84 ⎤ ⎢⎣− 0.84⎥⎦,
⎡ 0.16 ⎤ ⎢⎣1.386⎥⎦
输出方程的解(1/2)
3. 输出方程的解
� 将状态方程的解代入如下线性定常离散系统的输出方程: y(k)=Cx(k)+Du(k)
中,可得输出y(k)的解为
k −1
∑ y(k) = CGk x(0) + CGk− j−1Hu( j ) + Du(k)
2. 用Z变换法求解。先计算(zI-G)-1
z −1
zI − G =
= (z + 0.2)(z + 0.8)
0.16 z + 1
Z变换法(5/7)—例3-14
( zI
-
G )−1
=
adj( zI | zI -
-G) G|
=
⎡ z +1 ⎢⎣- 0.16
=
1 3
⎡ ⎢ ⎢ ⎢
4
z + 0.2 − 0.8
k −1
∑ x(k) = Φ(k , k0 )x(k0 ) + Φ(k , i +1)H (i)u(i)
i=k0
式中, Φ(k ,k0)称为线性时变离散系统的状态转移矩阵。
线性时变离散系统状态方程的解(2/6)
� 线性时变离散系统的状态转移矩阵Φ(k ,k0)满足如下矩阵差 分方程及初始条件:
其解为
3.5 线性离散系统状态方程的解
� 本节研究线性定常离散系统方程的解,需解决的主要问题: � 状态转移矩阵 � 状态转移矩阵的性质 � 状态方程的求解 � 状态方程解的各部分的意义 � 输出方程的解
线性离散系统状态方程的解(2/2)
� 线性定常离散时间系统的状态方程求解有递推法和Z变换法 两种主要方法: � Z变换法只能适用于线性定常离散系统, � 递推法可推广到时变系统和非线性系统。 � 下面将分别讨论 � 线性定常离散系统 � 线性时变离散系统 的状态空间模型求解。
线性定常离散系统状态方程的解(1/1)
3.5.1 线性定常离散系统状态方程的解
� 下面介绍线性定常离散系统的状态方程求解的 � 递推法和 � Z变换法。
最后讨论输出方程的解
递推法(1/10)
1. 递推法
� 递推法亦称迭代法。 � 用递推法求解线性定常离散时间系统的状态方程 x(k+1)=Gx(k)+Hu(k) 时,只需在状态方程中依次令k=0,1,2,…,从而有 x(1)=Gx(0)+Hu(0) x(2)=Gx(1)+Hu(1)=G2x(0)+GHu(0)+Hu(1) ……
� 该状态转移矩阵是下列差分方程初始条件的解: Φ(k+1)=GΦ(k) Φ(0)=I
� 用递推法求解上述定义式,可得
Φ(k)=Gk
因此,可得线性定常离散系统状态方程另一种解表示形式:
k −1
x(k) = Φ(k)x(0) + ∑ Φ(k - j -1)Hu( j)
j =0
亦为
k −1
x(k) = Φ(k)x(0) + ∑ Φ( j)Hu(k - j -1)
⎡1⎤ x(0) = ⎢⎣−1⎥例3-14
� 解 1. 用递推法求解。分别令k=1,2,3,…,则由状态方程有
x(1)
=
⎡ ⎢⎣−
0 0.16
1⎤ −1⎥⎦
⎡1⎤ ⎢⎣−1⎥⎦
+
⎡1⎤ ⎢⎣1⎥⎦
=
⎡0⎤ ⎢⎣1.84⎥⎦
x(2)
=
⎡ ⎢⎣−
Z变换法(1/7)
2. Z变换法
� 已知线性定常离散系统的状态方程为 x(k+1)=Gx(k)+Hu(k)
对上式两边求Z变换,可得 zX(z)-zx(0)=GX(z)+HU(z)
于是 (zI-G)X(z)=zx(0)+HU(z)
� 用(zI-G)-1左乘上式的两边,有 X(z)=(zI-G)-1zx(0)+(zI-G)-1HU(z)
递推法(2/10)
� 若给出初始状态x(0),即可递推算出x(1),x(2),x(3),…重复 以上步骤,可以得到如下线性离散系统状态方程的递推 求解公式: x(k) = Gkx(0) + Gk−1Hu(0) + ...+ GHu(k - 2) + Hu(k -1)
k −1
∑ = Gk x(0) + Gk− j−1Hu( j)
对上式进行Z反变换,有 x(k)=Z-1[(zI-G)-1zx(0)]+Z-1[(zI-G)-1HU(z)]
Z变换法(2/7)
� 在Z反变换中对标量函数存在下述公式和性质:
{ } Z −1 1/(1− az−1 ) = ak
k
∑ Z −1{W1 (z)W2 (z)} = w1(k − i)w2 (i)
+
z
1
+ 0.8 0.8
⎣ z + 0.2 z + 0.8
1⎤
z
⎥ ⎦
/[(
z
+
0.2)(
z
+
0.8)]
z
5
+ 0.2 -1
+
z
5
+ 0.8 4
⎤ ⎥ ⎥ ⎥
z + 0.2 z + 0.8⎦
� 因此,有
Φ(k) = Gk = Z −1[(zI - G)−1] 1 ⎡ 4(-0.2)k - (-0.8)k
⎢
⎥
⎢ ... ... ... ... ... ... ⎥
⎢⎣ 0
0 ... 0 ... λki ⎥⎦
其中Ωkj=k!/[(k-j)!j!]为二项式系数。
k <m
(4) 对系统矩阵G,当存在线性变换矩阵P,使得
则有
G~=P-1GP
G~k = P−1Gk P Gk = PG~k P−1
递推法(10/10)
j =0
线性时变离散系统状态方程的解(1/6)
3.5.2 线性时变离散系统状态方程的解
� 设线性时变离散系统的状态空间模型为
⎧ x(k + 1) = G(k) x(k) + H (k)u(k)
⎨ ⎩
y(k
)
=
C
(k
)
x(k
)
+
D(k)
u(
k)
式中,初始时刻为k0;初始状态为x(k0)。
� 假定系统状态方程的解存在且惟一,则解为
j =0
递推法(5/10)
� 比较连续系统与离散系统状态方程的解的表示形式: � 连续系统
t
x(t) = Φ(t)x0 + ∫0 Φ(t −τ )Bu (τ )dτ
� 离散系统
k −1
x(k) = Φ(k)x(0) + ∑ Φ(k - j -1)Hu( j)
j =0
初始状 初始时刻后输入的 态的影 影响,为脉冲响应函
= 3 ⎢⎣- 0.8(-0.2)k + 0.8(-0.8)k
5(-0.2)k - 5(-0.8)k ⎤
-
(-0.2)k
+
4(-0.8)k
⎥ ⎦
Z变换法(6/7)—例3-14
� 由Z变换,有 u(k)=1 U(z)=z/(z-1)
因此,有 X(z)=(zI-G)-1[zx(0)+HU(z)]
⎡
(z 2 + 2) z
⎣ z + 0.2 z + 0.8 z -1⎦
Z变换法(7/7)—例3-14
x(k )
=
Z
−1{ X
( z )}
=
1 18
⎡ - 51(-0.2) k ⎢⎣10 .2(-0.2) k
+ 44(-0.8) k + - 35.2 (−0.8) k
25 ⎤
+