K3.06-离散系统状态方程的建立
状态方程的建立一路状态方程的列写二由输入输出方
解 选状态变量 x1(t) = iL(t), x2(t) = uC(t)
iR2 uS2
L
C
(t)+R x (t)+x (t) = u x
1 1 1 2
S1(t)
x 2(t) + iR2(t) = x1(t)
1 (t ) L x 1 x 2 (t ) C
yangtzenormaluniversity物理学及电子信息工程系第八章系统的状态变量分析81状态变量与状态方程一状态变量与状态方程二动态方程的一般形式82状态方程的建立一电路状态方程的列写二由输入输出方程建立状态方程83离散系统状态方程的建立84连续系统状态方程的解85离散系统状态方程的解yangtzenormaluniversity物理学及电子信息工程系第八章系统的状态变量分析前面的分析方法称为外部法它强调用系统的输入输出之间的关系来描述系统的特性
物理学及电子信息工程系
第八章
系统的状态变量分析
YANGTZE NORMAL UNIVERSITY
例:电路如图,以电阻R1上的电压uR1和电阻R2上的电流iR2为输出,列写电路的状态方程和输 出方程。
R1 u R1 (t ) i (t ) 0 R2
0 0 u a (t ) 0 x ( t ) 1 s1 1 1 x2 (t ) 0 R u s 2 (t ) R2 2
y1 c11 x1 c12 x 2 c1n x n d11 f1 d12 f 2 d1 p f p y 2 c 21 x1 c 22 x 2 c 2n x n d 21 f1 d 22 f 2 d 2 p f p y q c q1 x1 c q 2 x 2 c qn x n d q1 f1 d q 2 f 2 d qp f p
离散时间系统状态方程和输出方程的求解

2
5
0
D
0 0
q[0]
2 3
x[k] u[k]
离散系统的状态方程和输出方程的时域求解
离散系统的状态方程为:
q[k +1] Aq[k] Bx[k]
在给定系统的初始状态q[k0]后,可直接用迭代法进行求解。
q[k0 1] Aq[k0] Bx[k0] q[k0 2] Aq[k0 1] Bx[k0 1]
2
5 q1[k]
0
q2 [k ]
系统状态变量的初始状态及系统输入为:
q1[0] q2[0]
2
3
x[k] u[k]
在时域求解该系统的状态变量和输出。
离散系统的状态方程和输出方程的时域求解
解:状态方程和输出方程写成矩阵形式:
q[k +1] Aq[k] Bx[k]
在z域求解该系统的完全响应。
离散系统的状态方程和输出方程的z域求解
解:状态方程和输出方程写成矩阵形式:
离散系统的状态方程和输出方程的时域求解
[例] 已知描述某离散系统的状态方程和输出方程为
q1[k q2[k
1] 1]
0
1
6
1
5
q1[k ] q2 [k ]
0 1
x[k ]
6
y1[k ] y2 [k ]
1
zq[0]
[C (
zI
A)1
B
D]X
(
z)
Yzi (z)
Yzs ( z)
然后再对Q(z)和Y(z)进行z反变换即可得到q[k]和y[k]。
离散系统的状态空间表达式
(1)连续系统:用微分方程来表示,采用拉 普拉斯变换传递函数进行分析。
离散系统:用差分方程来描述,用Z变 换脉冲传递函数进行分析。
因此,离散系统的状态空间表达式可通过差 分方程或脉冲传递函数。
(2)离散系统的信号采用数字形式,输入和 输出都是脉冲序列或数字序列。计算机控制 系统属离散系统。
试写出其状态方程和输出方程 。
解:
x1 (k 1) 0
1
0 x1(k) 0
x2
(k
1)
0
0
1
x
2
(k
)
0
u(k)
x3 (k 1) 6 5 2x3 (k) 1
x1(k)
y(k) x(k) 1
0
0x2 (k)
x3 (k )
例1.10 已知 y(k+3)+2y(k+2)+5y(k+1) +6y(k)=3u(k+2)+2u(k+1)+6u(k)
脉冲传递函数:
G(z)
Y (z) u(z)
bmzm bm1zm1 b1z b0 zn an1zn1 a1z a0
二 、状态方程的建立
1、由差分方程
设T=1 输入仅有(kT)项,b0=1 整个方程可以写为: y(k+n)+an-1y(k+n-1)+……+a0y(k)=u(k) 设x1(k)=y(k) x2(k)=y(k+1)=x1(k+1) x3(k)=y(k+2)=x2(k+1) ……
xn(k)=y(k+n-1)=xn-1(k+1) xn(k+1)=y(k+n)=-a0 x1(k)-a1 x2(k)-
离散系统的数学模型
2326.4 离散系统的数学模型为研究离散系统的性能,需要建立离散系统的数学模型。
线性离散系统的数学模型有差分方程、脉冲传递函数和离散状态空间表达式三种。
本节主要介绍差分方程及其解法,脉冲传递函数的定义,以及求开环脉冲传递函数和闭环脉冲传递函数的方法。
有关离散状态空表达式及其求解,将在第8章介绍。
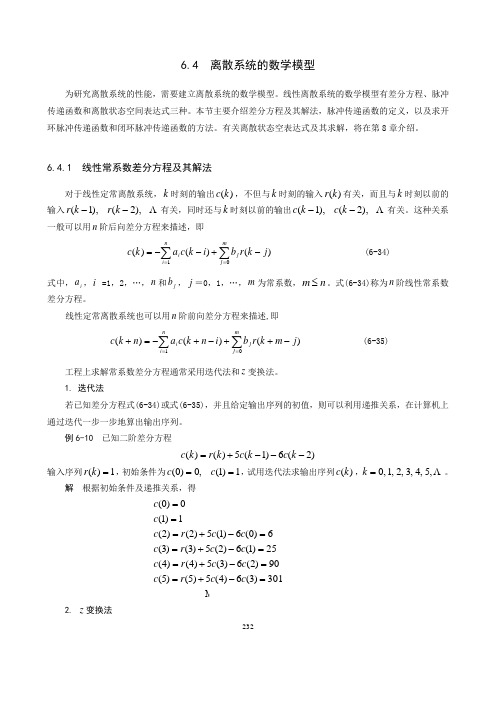
6.4.1 线性常系数差分方程及其解法对于线性定常离散系统,k 时刻的输出)(k c ,不但与k 时刻的输入)(k r 有关,而且与k 时刻以前的输入 ),2(),1(--k r k r 有关,同时还与k 时刻以前的输出 ),2(),1(--k c k c 有关。
这种关系一般可以用n 阶后向差分方程来描述,即∑∑==-+--=mj jni i j k r bi k c a k c 01)()()( (6-34)式中,i a ,i =1,2,…,n 和j b ,j =0,1,…,m 为常系数,n m ≤。
式(6-34)称为n 阶线性常系数差分方程。
线性定常离散系统也可以用n 阶前向差分方程来描述,即∑∑==-++-+-=+mj jni i j m k r bi n k c a n k c 01)()()( (6-35)工程上求解常系数差分方程通常采用迭代法和z 变换法。
1. 迭代法若已知差分方程式(6-34)或式(6-35),并且给定输出序列的初值,则可以利用递推关系,在计算机上通过迭代一步一步地算出输出序列。
例6-10 已知二阶差分方程)2(6)1(5)()(---+=k c k c k r k c输入序列1)(=k r ,初始条件为1)1(,0)0(==c c ,试用迭代法求输出序列)(k c , ,5,4,3,2,1,0=k 。
解 根据初始条件及递推关系,得0)0(=c 1)1(=c6)0(6)1(5)2()2(=-+=c c r c 25)1(6)2(5)3()3(=-+=c c r c 90)2(6)3(5)4()4(=-+=c c r c301)3(6)4(5)5()5(=-+=c c r c2. z 变换法233设差分方程如式(6-34)所示,对差分方程两端取z 变换,并利用z 变换的实数位移定理,得到以z 为变量的代数方程,然后对代数方程的解)(z C 取z 反变换,可求得输出序列)(k c 。
(第8讲)离散系统状态方程及解
X ( z ) ( zI G ) 1 zx(0) HU ( z )
25 17 z z0.2 22 z z0.8 18 z z 1 9 176 z 88 7 z z 30 z 0.2 45 z 0.8 18 z 1
Φ(t ) Φ(t, 0) eAt
Φ(t, t0 ) Φ(t t0 ) e
A(t t0 )
Φ1 (t ) Φ(t )
Φ(t1 t2 ) Φ(t1 )Φ(t2 ) Φ(t2 )Φ(t1 )
Φ(t2 , t1 )Φ(t1 , tt ) u (nT ) t nT t (n 1)T , A( t nT ) x(t ) e x(nT ) e A(t )bu* ( )d nT ( n 1)T AT x[(n 1)T ] e x(nT ) e A( nT T )bu* ( )d
25 17 (0.2) k 22 (0.8) k 18 9 x(k ) 176 7 (0.2) k 88 (0.8) k 18 45 30
tgq77@
Symbolic Math Toolbox of MATLAB
已知系统x(n 1) Gx(n) Hu(n), 求状态方程的解。其中 1 0 1 1 G , H 1, x(0) 1, u (n ) 1, n 1,2, 0.16 1
零输入响应自由响应零状态响应强迫响应tgq77126com状态转移矩阵就是将系统由一个状态转移到另外一个状态即制理论上叫状态转移矩数学上叫矩阵指数控tgq77126com信号在时间上不连续的信号叫离散信号
Modern Control Theory
现代控制理论离散系统
精选ppt
考虑初始条件为零时的z变换关系有
Z[ y(k)] Y (z)
Z[ y(k i)] zY (z)
对式两端取z变换加以整理,可得
G(z)
Y (z) U (z)
bnz n bn zn an
1z n1 b1z b0 1z n1 a1z a0
其解为
x(k
)
G
k
x(0)
G k 1
k
1i
Hu(i)
i0
y(k
)
CG
k
x(0)
C
G k 1
k
1i
Hu(i)
Du(k
)
i0
精选ppt
不失一般性,可将动态方程简化为
x(k 1) Gx(k), y(k) Gx(k)
对应的解为
x(k) Gk x(0), y(k) CGk x(0)
将y(k)写成展开式
bn
zn
n1z n1 1z 0
an1z n1 a1z
a0
bn
N(z) D(z)
精选ppt
在N(z)/D(z)的串联分解中引入中间变量Q(z)
u
1
zn
a z n1 n1
a1z
a0
z
n1zn1 1z 0
y
精选ppt
可以得到
znQ(z) an1zn1Q(z) a1zQ(z) a0Q(z) U (z)
Y (z) n1zn1Q(z) 1Q(z) 0Q(z) 设 X1(z) Q(z)
X 2 (z) zQ(z) zX1(z) X n (z) z n Q 1 (z) zX n1(z)
信号与系统王明泉第八章习题解答

第8章 系统分析的状态变量法8.1 学习要求(1)了解状态变量、状态、初始状态、状态空间、状态方程、输出方程、系统方程等概念及内涵;(2)能根据系统结构图、微分方程、差分方程、转移函数、系统框图,正确的选择状态变量,列出系统的状态方程和输出方程,并写成标准矩阵形式;(3)能采用时域方程和变换域方法求解系统状态方程和输出方程; (4)能根据状态方程和输出方程画出系统的框图。
8.2 本章重点(1)连续系统状态方程和输出方程的建立与求解;8.4 本章的内容摘要8.4.1状态方程的建立状态方程是描述系统的状态变量之间及其与激励之间关系的一阶微分方程,而输出方程是用状态变量和激励(有时还可能有激励的某些导数)表示的函数关系式。
(1)连续时间系统状态方程的建立通常,标准形式的状态方程为 )()()(t t t f x x B A +=•系统输出方程的标准形式为 )()()(t t t f x D C y +=式中)(t •x 表示状态变量的一阶导数,)(t f 是与外加信号有关的项,A 、B 、C 和D 为常数矩阵。
直接法:利用系统实际结构及系统所遵循的物理规律直接列出方程的方法。
间接法:根据已知的输入输出方程、系统框图或系统函数列写状态方程的方法。
(2)离散时间系统状态方程的建立对于一个有p 个输入和q 个输出的离散系统,如有k 个状态变量,其状态方程的一般形式为⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+++)()()()()()()1()1()1(212122221112112121222211121121n f n f n f b b b b b b b b b n x n x n x a a a a a a a a a n x n x n x p kp k k p p k kk k k k k k输出方程的一般形式为⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡)()()()()()()()()(212122221112112121222211121121n f n f n f d d d d d d d d d n x n x n x c c c c c c c c c n y n y n y p qp q q p p k qk q q k k q可简写为)()()1(n n n f x x B A +=+ )()()n n n f x D C y(+=式中C B A 、、和D 是常数矩阵。
6.2 离散系统状态空间模型的建立
教学模块6 基于状态空间模型的极点配置设计方法教学单元2 离散系统状态空间函数模型的建立离散系统状态空间模型差分方程连续系统状态空间模型脉冲传递函数建立被控对象离散状态空间模型的方法:•由连续系统状态空间模型求取•由差分方程求取•由脉冲传递函数求取2.1 由连续状态空间模型建立离散状态空间模型()()()()()t A t B t t C t =+⎧⎨=⎩x x u y x (1)设连续控制对象的模型可用如下的状态空间表达式描述:其中设x 为n 维状态向量,u 为m 维控制向量,y 为r 维输出向量。
设在连续的对象前面有零阶保持器,即()() (1)t k kT t k T=≤<+u u (2)将控制对象与保持器一起进行离散化处理,得到离散系统模型。
对式(1)求解:()()()t A t B t -=xx u 两边同乘,得到Ate-(()())()AtAtet A t e B t ---=x x u 由于(()())[()]At Atd e t A t e t dt---=x x x 于是[()]()AtAt d e t e B t dt--=x u 两边积分,有:00[()]()tt A A t t d e d e B d d τττττττ--=⎰⎰x u 其中00000[()] [()]() ()()tt t A A A t t t At At d e d d e e d e t e t ττττττττ-----===-⎰⎰x x x x x (a)(c)因此,有:0()()()tAt AtA t et et eB d τττ---=+⎰x x u 两边同乘,有:00()()0()()()tA t t A t t t et eB d τττ--=+⎰x x u Ate (3)令,由(2)式,即考虑零阶保持器,得T k t kT t )1( ,0+==(1)()(1)()()k TATA kT T kTk e k e d B k ττ++-⎡⎤+=+⎢⎥⎣⎦⎰x x u (4)()() (1)t k kT t k T=≤<+u u令,(4)式化为:(1)()()k F k G k +=+x x u (5)τ-+=T kT t 其中⎰==TAt ATdtBe G eF 0,(6)式(1)中,输出方程的离散形式为:()()k C k =y x (7)故连续模型等效离散状态空间表达式为:(1)()()()()k F k G k k C k +=+⎧⎨=⎩x x u y x (8)矩阵指数及其积分的计算⎰==TAtATdtBe G e F 0,拉氏变换法可以证明:11()At e L sI A --=-因此,求F 、G 的步骤如下:(1)求得的逆矩阵(2)取其拉氏反变换,获得(3)求F 和G)(A sI -1)(--A sI Ate (9)(10)幂级数计算法At e 的幂指数形式为!3!23322 ++++=t A t A At I eAt令!4!3!243322++++==⎰TA T A AT IT dt e H TAt(11)(12)于是22332232!3! 2!3! ATTAtA T A TF e I AT AT A TI A IT I A e dt I AH==++++⎛⎫=++++ ⎪⎝⎭=+=+⎰()0TAt G e dt B HB==⎰(13)(14)!4!3!243322++++==⎰T A T A AT IT dt e H TAt例2.1设连续系统的状态空间模型为求其离散化状态空间模型。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
a1
x1(k) x2 (k)
b
f
(k)
3
离散系统状态方程的建立
例2:已知系统方程如下,列系统状态方程和输出方程。
y(k 2) a1 y(k 1) a0 y(k) bf (k)
解: (1)
状态变量选择:
令 x1(k) y(k) , x2 (k) y(k 1)
(2) 状态方程:
x1(k 1) x2 (k)
知识点K3.06
离散系统状态方程的建立
离散系统状态方程的建立
主要内容:
1. 由差分方程建立离散系统状态方程的方法 2. 由框图流图建立离散系统状态放的方法
基本要求:
1. 掌握由差分方程建立离散系统状态方程/输出方程的方法 2. 掌握由框图流图建立离散系统状态方程/输出方程的方法
1
离散系统状态方程的建立
1) 1)
x2 (k) a0 x1
(k
)
a1
x2
(k
)
f
(k)
(3) 输出方程:
y(k) b2q(k 2) b1q(k 1) b0q(k) b2[a0x1(k) a1x2 (k) f (k)] b1x2 (k) b0x1(k) (b0 a0b2 )x1(k) (b1 a1b2 )x2 (k) b2 f (k )
引入 q(k): q(k 2) a1q(k 1) a0q(k) f (k)
代入原系统差分方程,可得: y(k) b2q(k 2) b1q(k 1) b0q(k) 令 x1(k) q(k) , x2 (k) q(k 1)
5
离散系统状态方程的建立
(2) 状态方程:
x1 (k x2 (k
6
离散系统状态方程的建立
例4 系统框图、流图如图,列状态方程和输出方程。
F(z) +
∑ +
+
b2
z-1
x2 (k)
a1 a0
b1 z-1 x1(k ) b0
+ + Y(z)
∑ +
F(z) 1
b2 b1
z 1
z 1
b0
a1 x2 (k ) x1(k) a0
1 Y(z)
解:(1)选状态变量:选差分器输出为状态变量,如图;
K3.06 离散系统状态方程的建立 例1 已知系统方程如下,列状态方程和输出方程。
y(k) a1 y(k 1) a0 y(k 2) bf (k)
解:(1) 状态变量选择:
令 x1(k) y(k 2) , x2 (k) y(k 1)
(2) 状态方程:
x1 (k x2 (k
1) 1)
7
离散系统状态方程的建立
(2) 状态方程:
x1(k 1) x2 (k)
x2
(k
1)
a0x1(k)
a1x2 (k)
f
(k)
(3) 输出方程:
y(k) b0 x1(k) b1x2 (k) b2[a0x1(k ) a1x2 (k ) f (k )]
(b0 a0b2 )x1(k ) (b1 a1b2 )x2 (k ) b2 f (k )
x2 (k) a0 x1
(k
)
a1x2
(k
)
bf
(k
)
(3) 输出方程:
y(k) a0 x1(k) a1x2 (k) bf (k)
2
离散系统状态方程的建立 (4) 矩阵形式:
状态方程:
x1(k 1) x2 (k 1)
0 a0
1 a1
x1(k) x2 (k)
0 b
f
(k)
输出方程:
y(k) a0
x2
(k
1)
a0
x1
(k
)
a1x2
(k
)
bf
(k
)
(3) 输出方程:
y(k) x1(k)
4
离散系统状态方程的建立 例3:已知系统方程如下,列状态方程和输出方程。
y(k 2) a1 y(k 1) a0 y(k) b2 f (k 2) b1 f (k 1) b0 f (k)
解: (1)状态变量的选择:
(4) 矩阵形式:
x1(k x2 (k
1) 1)
0 a0
1
a1
x1(k)
x2
(k
)
0 1
f
(k)
y(k) b0 a0b2
b1
a1b2
x1(k) x2 (k)
பைடு நூலகம்
b2
f
(k
)
8