挖掘机动臂有限元分析
挖掘机动臂强度分析

WY10B挖掘机动臂强度分析(一拖(洛阳)工程机械有限公司洛阳 471003)摘要:以WY10B液压挖掘机为研究对象,对反铲挖掘机工作装置——动臂建立Pro/E实体模型,并用Pro/MECHANICA模块对挖掘机动臂的设计模型在受最大应力的危险工况下进行有限元强度分析。
对实体动臂在危险工况下进行实际应力测试,与有限元分析结果进行对比,分析差异,为挖掘机动臂改进提供理论和实际依据。
关键字:液压挖掘机动臂有限元应力中图分离号:**** 文献标示码:A1.概述液压挖掘机是工程机械的主要产品之一,具有较高的技术含量和工作效率,它被广泛应用于建筑、筑路、水利、电力、采矿、石油、天然气管道铺设和军事工程等基本建设之中。
动臂是挖掘机工作装置(铲斗、斗杆、动臂) 3 大部件之一[1],是主要承载件。
在挖掘过程中,动臂直接或间接承受很大外力。
作业环境的状况也对动臂的强度和变形在一定程度上造成很大影响。
目前,在国内液压挖掘机设计中,对动臂的应力进行分析的较多,而对理论与实际结合分析较少。
本文结合WY10B挖掘机的实际作业工况,对挖掘机动臂在受力最大的典型工况下挖掘时进行强度分析和实际应力测试,为挖掘机动臂设计提供理论和实际依据。
2.计算工况选择对挖掘机动臂进行强度分析时,分析采用的工况必须是有限元模型受力最大的危险工况[2]。
根据挖掘机的连接情况, 使用Pro/ MECHANICAMOTION 模块对其进行动力学分析,利用Pro/MECHANICA MO TION 模块的运动仿真功能,模拟工作装置的运动情况,求出了动臂受力最大的工况。
分析发现,危险断面最大应力发生在采用铲斗挖掘的工况下,因此计算位置可按以下条件确定:1)、动臂位于动臂油缸作用力臂最大处;2)、斗杆位于斗杆油缸作用力臂最大处;3)、铲斗位于发挥最大挖掘力位置。
3载荷计算工作装置各构件通过销连接,在计算工况中不考虑偏载的影响,可以认为其只承受X、Y向的力,整个结构为静定结构,在计算工况中,铲斗缸产生主动力,大腔半径为27.5mm,压力为28MPa,则最大推力为:F G =R G=πr2P=π×0.02752×28×106=66489.5 N分别求得动臂各铰点的反力如下:动臂各铰点支反力:以上求出的力都是合力,在实际结构中,铰点处的受力并非集中力,而其附近的应力分布又是我们所关心的,为模拟实际情况,作如下假定:1)、载荷在X-Y面内在180°范围内按余弦分布;2)、分布力的方向为沿销孔表面的法向;3)、载荷在Z向均布;由假定构造载荷分布函数为: 式中:F (θ ) = A cos (θ-α) (1) A 为待定常系数,合力R 已知,分布力F 在P 向的合力应等于R ,即式中:l 为销孔长度,r 为销孔半径。
挖掘机动臂有限元模态分析
中 图分 类 号 :H1 ,U 2 文 献标 识码 : T 6T 6 1 A
挖掘机工作装置的传统设计多采用静力计算确定工作装置
当系统的 自由度很大时对这样一组耦合方程进行求解将非 模态分析方法就是以无阻尼的各阶主振型所对应的模态 的受力 ,依靠 安全系数的选取保证其强度及 可靠性的经验方法 , 常困难 。 1解耦 , 变成各个独立的微分方程 。 对 而未能充分考虑其工作 过程 中所受动态载荷带来 的冲击与振动 坐标来 代替物理坐标使式( ) 问题 。挖掘机作业过程中工作装置时刻处于振动之 中, 且其振动 式() 1 进行拉氏变换后得到: 怕【] ) ()_ ) () s c+ { s }( } 2 陶 x 5
r dotntos e w i r asltfens adpat a rs i i .tatte o e 5moe r i u i w t s hc ae boue rees n r i etco A s. r1 dsae e t a h c c l rtn l h f aotdadetn e.sihrn eunyadm i ir i oeirve e.h td rvdsi— dpe n xeddI n eetrqec n anv a o m d s eiw dTes y poie m— t f b tn u p r t oe p a eefr ayio m cv o, dipoiefu dt no eaa s — ot dl a m tro l sf a o e aa ra t rvds on ai t l i o d n a m r n a s r f x t n o f h n y sf y n ip r r neadot i i rcua ya i caat ii frt m o cv o dte m f a c e omac i z o o s utr dn c hr esc o ea e aa ra n p m a nf t t l m c r ts h r f x t n h
浅谈挖掘机的动臂有限元及改进设计
吴 元 峰
【 日立建机 ( 中国) 有 限公司 安徽 合肥 2 3 0 0 0 0 ]
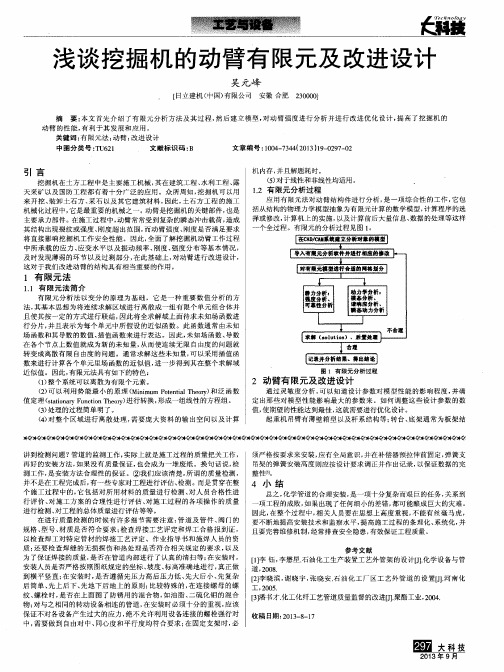
摘 要: 本文 首先介 绍 了有 限元分析 方法及其 过程 , 然后建 立模型 , 对 动臂强度 进行分析 并进行 改进优 化设计 , 提高 了挖掘机 的 动臂 的性能 , 有 利于其发 展和应用 。 关键词 : 有 限元 法 ; 动 臂; 改进设计
ቤተ መጻሕፍቲ ባይዱ
讲到检测 问题 ?管道的监测工作, 实际上就是施工过程的质量把关工作, 再好的安装方法 , 如 果没有质量保证 , 也会 成为一堆废纸 。换句 话说, 检 测工作, 是安装方法合理 性的保证 。⑦我们应 该清楚 , 所谓 的质 量检测, 并不是在工程完成后 , 有一些专家对工程进行评估 、 检 测 。而 是 贯 穿 在 整 个施工过 程中 的, 它包括对所 用材料 的质 量进行检 测、 对人 员合格 性进 行评价 、 对施工方 案的合理性 进行评估 、 对施工过程 的各项 操作 的质量 进行检测 、 对工程 的总体质量进行评估等等 。 在进行质 量检测 的时候有许 多细节需要注 意 : 管道及管件 、 阀门的 规 格、 型号 、 材质是 否符合要 求: 检查焊接 工艺评定 和焊工合格 报到证 , 以检查焊 工对 特定管 材的焊接工 艺评定 、作 业指导 书和施焊人 员 的资 质; 还要检 查焊缝 的无 损探伤和 热处理是 杏符合相关规 定的要 求, 以及 为了保 证焊接 的质量 , 是否在 管道 内部进行 了认真 的清扫等 ; 在安装 时, 安装人 员是否严格按照 图纸规 定的坐标、 坡度 、 标 高准 确地进行 , 真 正做 到横平竖 直; 在安装 时, 是否遵循 先压力 高后压力低 、 先大后小 、 先复杂 后 简单 、 先 上后下 、 先 地下后地上 的原则 ; 比较特殊 的, 在连接螺 母 的螺 纹、 螺栓 时, 是否在上 面图 了防锈 用的混合物 , 如油脂 、 二硫化钼 的混合 物: 对 与之 相同的转动设备相连 的管道 , 在安装 时必须 十分的重视 , 应该 保 证不对 各设备产生过大 的应 力, 绝不允许利用设 备连接的螺栓强行对 中, 需要做 到 自由对 中、 同心度和 平行度均符 合要求 : 在 固定支架 时 , 必
挖掘机工作装置整体有限元分析误差减小方法
关键 词 : 干混砂浆 搅 拌 机
1 干混砂 浆搅拌机概述
机, 为 w 型 卧式简体 、 双轴 多桨结 构, 。因具有强搅 拌、 生 产商 品干粉厂家 的首选 机 型 。我 厂 自 2 0 0 9年开始投 入干混砂 浆搅 拌 楼站 的研 制, 已逐 步形成 了系列 产 品,
挖 掘 机 工作 装 置 整 体 有 限 元 分 析 误 差 减 小 方 法
The M e t h o d f o r Re d u c i n g Er r o r i n t h e W h o l e Fi n i t e El e me n t An a l y s i s
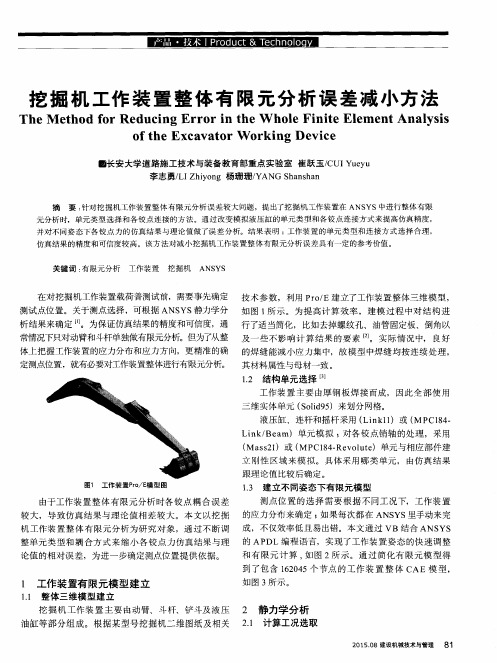
摘 要 : 针对 挖掘机 工作装 置整体有 限元分析 误差较 大问题 ,提 出了挖 掘机工作装置在 ANS YS中进行整 体有限 元分析 时,单元类型 选择和各 铰点连接 的方法 。通 过改变模拟液压 缸的单元类型和各 铰点连接方 式来提高仿真精度, 并对不 同姿态下各铰点 力的仿真结果 与理 论值做了误 差分析。结果 表明 : 工作装 置 的单元类 型和连接 方式选择合 理 ,
( Ma s s 2 1 )或 ( MP C1 8 4 . Re v o l u t e )单元与相应 部件建 立 刚性 区域 来模 拟 。具 体采用 哪 类单元 ,由仿 真 结果
跟理论值 比较后确定 。
图1 工作装置P r o / E 模 型 图
1 . 3 建 立不 同姿 态下 有 限元模 型
o f t he Ex c a va t or W o r ki ng De vi c e
豳长安 大学道 路施工技 术与装备 教育部重 点实验 室 崔跃 t/ C UI Y u e y u 李志勇/ L I Z h i y o n g杨 珊珊/ Y AN G S h a n s h a n
基于ANSYS Workbench的挖掘机动臂有限元分析
考依据。
关 键 词 :动 臂 ;S o lid w o r k s ;A N S Y S W o r k b e n c h ;静 力 学 分 析
中 图 分 类 号 :T Q 422. 2 文 献 标 识 码 : A
文 章 编 号 :1 0 0 7 6 9 2 1 ( 2 0 1 7 ) 0 6 0 0 8 5 01
备制造业中的应用。
• 85 •
黄 鹏 ,等 • 杨 家 坪 滑 坡 稳 定 性 研 究
2017年 第 6 期
表3
稳定性计算结果
工况组合 1 2 3 4
稳定性系数 1 2029 1 2154 1 0568 1 1838
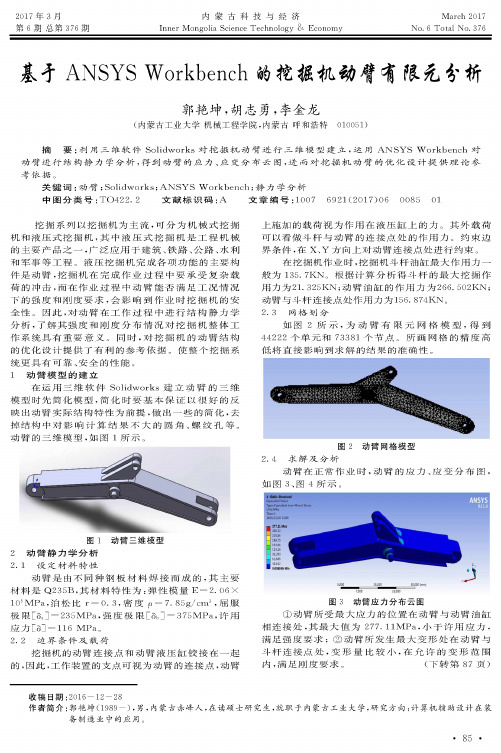
在 运 用 三 维 软 件 Solid w o rk s建 立 动 臂 的 三 维 模 型 时 先 简 化 模 型 ,简 化 时 要 基 本 保 证 以 很 好 的 反 映 出 动 臂 实 际 结 构 特 性 为 前 提 ,做 出 一 些 的 简 化 ,去 掉 结 构 中 对 影 响 计 算 结 果 不 大 的 圆 角 、螺 纹 孔 等 。 动 臂 的 三 维 模 型 ,如 图 1 所 示 。2
挖 掘 系 列 以 挖 掘 机 为 主 流 ,可 分 为 机 械 式 挖 掘 机 和 液 压 式 挖 掘 机 ,其 中 液 压 式 挖 掘 机 是 工 程 机 械 的 主 要 产 品 之 一 ,广 泛 应 用 于 建 筑 、铁 路 、公 路 、水 利 和 军 事 等 工 程 。液 压 挖 掘 机 完 成 各 项 功 能 的 主 要 构
如 图 2 所 示 ,为 动 臂 有 限 元 网 格 模 型 ,得 到 44222个 单 元 和 73381个 节 点 。所 画 网 格 的 精 度 高 低将直接影响到求解的结果的准确性。
小型挖掘机工作装置三维建模及有限元分析
Ab t a t s r c :W i e a d t h r i g d v c fa s e i c o s i ma l ie h d a l x a a o , D t r g r o t e wo k n e ie o p cf d me tc s l s z y r u i e c v t r a 3 h i — c
中图 分 类 号 :T 1 H 7 文献标识码 : A 文章 编 号 : 6 2—5 8 (0 1 0 —0 6 —0 17 5 12 1 ) 1 0 3 5
Thr e di e i na o lng and f nie e e e nal i n e - m ns o lm de i i t l m nt a ys s o w o ki v c s f r s a ls z r ng de i e o m l- i e hyd a i xc va o s r ulc e a t r
t e a a y i r s l r v d t e h o e ia b ss a d e c ma k n a a o t e h sc l x a a o h n l ss e u t p o ie h t e r t l a i n b n h r i g d t f r h p y i a s c e c v t r
的建 模在 设计 图纸 的基 础 上 , 主要 由动臂 、 杆 、 斗 、 斗 铲 油缸 等组 成 .
W NG Ja - n,F N G a gjn, H A i nj u E G u n - i Z ANB .o g,Y Jn -u i n h I i gy
( l g fM e h nia gn e ig a tma in,Hu qa ve st ,Xime 61 21,Chn ) Col eo c a c l e En ie rn ndAu o to a io Uni r iy a n3 0 ia
挖掘机动臂的有限元分析
5 . 2工 况 二
挖掘机处 于停 机面最大挖掘半径处 , 铲 斗挖掘 , 铲斗在发挥 最 挖 掘机处于铲斗挖掘 , 铲斗在发挥最大挖掘力位置进行挖掘 。 大挖掘力位置进行挖掘。 经计算 ,工况二 中动臂 最大 变形量 为 2 . 3 1 3厘 米 ,最 大应 力 该位置 出现在斗杆油缸全缩 , 铲斗齿尖 、 斗 杆与铲斗铰 接点及 2 6 7 . 7 M P a , 与许用应力 3 4 5 MP a 相 比, 该工况位置的受力是安全 的。 斗杆与斗杆油缸铰接点这三点处 于同一直线上 , 且大臂油缸缩进使 5 - 3工 况 三 铲斗齿尖处于地面上。 工况三 中动臂最 大变形 量为 2 . 1 4 4厘米 ,最大应力 2 9 0 . 3 MP a , 1 . 2 工 况 二 与材料许用应力 3 4 5 M P a 相比, 该 工况位置 的受力安全 。 挖掘机处 于最深挖掘位置处 , 铲斗挖掘 , 铲 斗在发挥最 大挖掘 6 结 论 力位置进行挖掘。 根据 P r 0 , I Ⅵ E c H A N I A c A计算 可知 , 在三种 工况下 , 挖掘 机在工 此位置 出现在动臂油缸全缩 , 即动臂位 置最低处 , 此 时斗杆与 况三状态时, 即挖掘机处于动臂 、 斗杆最大受力位 置 , 挖掘机 动臂 的 斗杆油缸铰接点 、 斗杆与铲斗铰接点及铲斗齿尖在 同一直线上且垂 受力最大 , 这也和工程实 际相 符 , 工况 三位置挖掘机 动臂 的受 力依 直于挖掘面 。 然安全 , 由此可以得出 , 本挖掘机动臂结构完全符合结构强度要求 。 1 . 3 工 况 三 , 参考文献 大臂 、 斗杆处 于最 大受力位置处 , 铲斗在发 挥最大挖掘 力位置 【 1 1 康 海 洋. 液 压 挖 掘 机 动臂 结 构动 态分 析 [ D 1 . 进行挖掘 。 [ 2 】 杨彩红, 马永杰 . 基 于有 限元的挖掘机 动臂性 能优 化分 析[ J ] . 机械
基于Pro/E5.0和ANSYSWorkbench14.5的挖掘机动臂有限元分析
基于Pro/E5.0和ANSYSWorkbench14.5的挖掘机动臂有限元分析文章以反铲挖掘机的动臂为研究对象,对挖掘机最典型的几种工作状况进行分析,利用Pro/E和ANSYS Workbench两种CAE软件,先在Pro/E中建立了液压挖掘机动臂的三维模型,再对模型进行了强度分析和变形分析,给挖掘机动臂的设计提供了依据。
标签:挖掘机;工作装置;动臂;有限元前言挖掘机是工程建筑机械的主要机种之一,在建筑、交通、采矿、国防及城市建设等土石方施工中起着十分重要的作用。
随着应用范围的日益扩大,在设计理论和方法、分析和研究手段也有了质的飞跃。
本文利用PRO/E建立挖掘机的动臂模型,经Pro/E算出各铰点的受力情况,再利用ANSYS Workbench14.5对动臂的结构强度进行分析。
充分利用这2种CAE软件各自的特点,从而提高对问题的分析效率和计算精度。
1 动臂模型的建立反铲挖掘机的结构如图1所示,其工作装置主要有铲斗、铲斗液压缸、斗杆、斗杆液压缸、动臂以和动臂液压缸。
先对动臂实体结构特征进行分析,确定这些结构特征建立的先后顺序和每个实体特征的建立方法,保证模型所包含的参数尺寸尽量少,结构特征尽量简单。
分析和确定结构特征后,建立动臂模型。
Pro/E 提供了完整的建模功能,利用拉伸、旋转、切割、扫描、切除和抽壳等基本功能和曲面设计,建立工作装置的实体模型。
2 Pro/E与ANSYS对接3 动臂有限元分析3.1 定义单元属性、材料有关特性目前,绝大多数挖掘机的工作装置为不同厚度的16Mn钢材焊接而成,其屈服强度在275MPa附近。
Workbench实体单元类型采用默认的SOLID187,由于Workbench中没有16Mn,需添加新材料赋予新属性,设置动臂材料的基本参数如表1所示。
3.2 动臂网格划分一个好的网格非常重要,可以在求解过程中将误差降低到最小,避免引起数值发散和不正确得到不准确的结果,甚至还会导致不能求解。
基于Pro/Mechanica环境挖掘机动臂的有限元模态分析
提 供 了 较科 学 的理 论 依 据
[1]
,
,
.
其 中根 据加 工 工 艺 和 实 际 结构 条 件 的限 制 阻 尼 间
l
m
m
[ 参考 文 献 ] 陈 义 保 宋 中 民 等 基 于 灰 色 关 联 度 的 磁 流 变 阻 尼 器 结构参 数
的 优 化 设 计 [ J ]. 台大 学 学 报 ( 自然 科 学 与 工 程 版 ) 烟
o
.
Key l
ds
:
t
he
in
a r m
f
e x c a v a
to
r
;P
r o
/ e M
c
ha
n
ic
a
;F
EA
概
述
,
由振 动 特 别是 确 定 结 构 的 固 有 频 率 是 设 计 人 员 可 以 避
,
,
动 臂是 挖 掘 机 的关 键 部件 也 是 主 要 承 力 部 件 挖 掘 机 动 臂 在 工 作 中存 在振 动 不 稳 定 的 情 况
( 1 ) :4 6 5 0
—
.
度 的关 系 曲线 方 程 川 为 :
r
。
孙 靖 民 机 械优 化 设 计 ( 第 三 版 ) [ M ] 北 京 :机 械 工 业 出 版社
.
,
=
4 x 10
—
7
/ 0 000 82H /
_
s
。
.
+
0 34 82H
.
一
0 663 1 l
.
:
17 0
一
18 0
.
H : N l /h 2
有限元分析法在挖掘机工作装置分析中的应用张晓辉
MPC
Y ZX
MPC
Z
Y X
图 1 动臂有限元模型图 图 2 斗杆有限元模型图
2.2 单元的模式
单元模式是单元特性分析的第一步。结构离散化
完成之后,为用节点位移表示单元位移、应力、应变,采
用位移模式或位移函数。根据所选定的单元位移模式
就可导出用节点位移表示的单元内任意点的位移关系
式,其矩阵形式为:
{ f } = [N]{δ}e .
一点的应变列阵;[B] 为应变矩阵;{R}e 是单元的节点
力列阵;[K]e 称为单元刚度矩阵,是单元位移和单元
节点力之间的转换矩阵,可以导出:
[K]e = ∭[B]T[D][B]dxdydz.
(7)
单元组集整体分析是对各个单元组成的整体进行
分析。
{R} = [K]{δ}.
(8)
式中:{Ri} = {Qi} + ∑{Pie} ,其中 {Qi} 为节点 I 上的集
化,并用弹性力学理论分析,得到直观的应力及变形
结论。
1 挖掘机工作装置的弹性力学基础
挖掘机的斗杆和动臂在挖掘中承受挖掘阻力,必
然造成机械装置的弹性体变形。而弹性力学原理是斗
杆和动臂应力和变形分析的理论基础[3]。弹性体在载
荷作用下,体内任意一点的应力状态可由 6 个应力分
量表示。弹性体还将产生位移和变形,即弹性体位置
0引言
动臂和斗杆是挖掘机工作装置的主要部件。挖掘
时将承受很大的交变复合外力,使其强度和变形受到
很大影响,因此它们的性能好坏直接影响挖掘机的寿
命和使用安全。有限元分析法作为有效的力学分析软
件,把无限多个自由度的弹性连续体理想化为有限个
自由度单元的集合体,使问题简化为适于数值解法的
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
挖掘机动臂结构设计及仿真分析
学生姓名:杨鹏
专业:机械设计制造及其自动化指导老师:何孔德副教授
挖掘机介绍
挖掘机,又称挖掘机械(excavating machinery),是用铲斗挖掘高于或低于承机面的物料,并装入运输车辆或卸至堆料场的土方机械。
挖掘机挖掘的物料主要是土壤、煤、泥沙以及经过预松后的土壤和岩石。
哥弟官方旗舰店
,从近几来工程机械的发展来看,挖掘机的发展相对较快,挖掘机已经成为工程建设中最主要的工程机械之一。
挖掘机最重要的三个参数:操作重量(质量),发动机功率和铲斗斗容。
本课题的主要任务:
1.对挖掘机动臂进行简化处
理,并用Pro ENGINEER建
立三维。
2.将三维模型导入ansys中
,并对三维模型加载,得出
应力云图。
3.针对挖掘机动臂应力云图,结合动臂结构,进行改变,以改善动臂的应力集中情况。
对挖掘机动臂结构进行简化处理 在ansys有限元
分析中是不允
许有缝隙出现
的,所以将动
臂的一些地方
进行简化处理,
然后建立三维
模型
挖掘机动臂的二维图形挖掘机动臂的三维图形
挖掘机受力分析及动臂应力计算
(1)、挖掘机阻力均布在铲斗的切削板上,此时可等效为集中载荷
Fa作用在铲斗切削板中部。
(2)、挖掘机阻力Fb作用于铲斗的边齿,作用于铲斗的最外侧。
(3)、挖掘机阻力Fb作用于铲斗的边齿,同时受到横向力Fc的作用。
工作装置的受力分析
(1)、挖掘机阻力均布在铲斗的切削板上,此时可等效为集中载荷Fa作用在铲斗切削板中部。
(2)、挖掘机阻力Fb作用于铲斗的边齿,作用于铲斗的最外侧。
(3)、挖掘机阻力Fb作用于铲斗的边齿,同时受到横向力Fc的作用。
如图建立动臂应力计算图形,把动臂受力作为作为静载分析。
挖掘机动臂的前处理
(1)、动臂单元类型选取。
preprofessor》element type》beam
(2)、定义材料属性。
preprofessor》material model》EX(1.8e5)PRXY (0.3)
(3)、定义截面。
preprofessor》sections》beam》commom sections(箱型结构)
(4)、网格划分。
preprofessor》meshing
(5)、加载和求解。
solution》define loads》apply》structure(1处点约束)(6)、查看结果。
Main Menu——General Postproc——Element Table——Define Table
材料泊松比弹性模量E/GPa密度
Q3450.32207800
加载后得到的应力云图(1)、主要较大应
力发生在弯臂处的隔
板上(如上图所示),
应力值1692Mp,该位
置是动臂缸耳板与隔
板的十字交叉处。
此
处结构欠合理,应该
改正。
(2)、弯臂上部边
角线应力值为2400Mp,
误差在8%以内,应力
略大,该应力不是上
耳板造成的,与截面
尺寸没有关系。
对动臂结构进行优化
由原始的动臂应力云图可以知道,动臂在转弯处应力集中现象比较严重。
因此,必须提出改进方案,以减小应力集中的现象。
与原方案相比,十月传奇 应力下降约20%,集中应力基本消除,各处的分布比较均匀,在安全范围内,修改方案是可行的。
动臂结构优化
将该零件作为一个整体,进行铸造,然后用用螺栓连接,将该零件和两侧板连接在一起。
优化前后动臂的应力云图对比优化前后对比发现,动臂在优化后,其受力情况明显要好,应力集中现象相对来说不是那么明显。
动臂缸耳板处的应力下降,与原方案相比,应力下降约20%,集中应力基本消除,各处的分布比较均匀,在安全范围内,修改方案是可行的。
本文总结与展望
本文首先通过对工程机械产品市场前景的分析,简述了挖掘机各种功能,说明该种工程机械在国家基本建设中发挥着其他工程机械产品不能替代的作用。
本论文以提高液压挖掘机产品的质量作为课题的切入点,选择了挖掘机动臂有限元分析和优化设计作为课题研究对象。
本文首先通过对工程机械产品市场前景的分析,简述了挖掘机各种功能,说明该种工程机械在国家基本建设中发挥着其他工程机械产品不能替代的作
用。
挖掘机挖掘的物料主要是土壤、煤、泥沙以及经过预松后的土壤和岩石。
从近几来工程机械的发展来看,挖掘机的发展相对较快,挖掘机已经成为工程建设中最主要的工程机械之一。
挖掘机最重要的三个参数:操作重量(质量),发动机功率和铲斗斗容。
蓝若水。