PLC顺序控制设计法编制梯形图的四种方式
PLC顺序控制梯形图的设计方法探讨

单 方便 . 软 件 方 面主 要 是 程 序 的 设 计 。P L C 的 编 程 语 言 国 际 标 准有五种 , 其 中梯 形 图是 使 用 最 多的 P L C 图形编程语 言 。 图 1运 输 带 起 动 停 机 示意 图 Hg . 1 Th e t r a n s p o r t b e l t s t a r  ̄g a n d s t o p p i n g d i a g r a m 梯 形 图 与 继 电 器 控 制 系 统 的 电路 图相 似 ,具 有 形 象 直 观 、 易 首先 , 根 据 控 制要 求 画 出顺序 功 能 图 , 如 图 2所 示 , 顺 序 学易懂等优 . 羔, 很容 易被熟 悉继 电器控 制的技 术人 员掌握 。 顺序控制 是按照生 产工艺预先规 定的顺序 。 在 各 个输 入 功 能图 中的各步 可以用存储 器住 M 来代替 。这样在 转换成 信号 的作 用下 , 根 据 内部 状 态 和 时 间 顺 序 。 在 生 产 过 程 中 各 梯 形 图 的 时候 比较 方便 。 个执行机 构 自动地 、 有秩序地进 行操作 。顺序 控制设计 法的 设计 步骤 为: 首先, 根 据 工 艺要 求 , 画 出顺 序 功 能 图 ; 然后 根 据 顺 序 功 能 图 设 计 出梯 形 图 。 顺 序 功 能 图 ( S e q u e n i t a l F u n c t i o n C h a r t简称 s F c ) 是 描 述 控 制 系统 的 控 制 过 程 、 功 能 和 特 性 的 一 种 图 形 .是 设 计 P L C 的 顺 序 控 制 程 序 的 主 要 工 具, 它 主 要 由步 、 动作、 转换 、 转 换 条 件 及 有 向连 线 组 成 。本 文 主 要 论 述 如何 根 据 已画 好 的 顺 序 功 能 图设 计 梯 形 图 。 P L C 顺 序控 制梯形 图的常用设计方 法有三种 : 使 用 起 保 停 电路 的 设 计法, 以 转 换 为 中心 的设 计 法 以及 使 用 S C R . 指令 的设计 法。 本 文 以德 国西 门子 公 司 生产 的 小 型 P L C ¥ 7 - 2 0 0为 例 。 通 过 一 个 具 体 实例 , 分 剐 采 用 以 上 三 种 不 同 的 设 计 方 法 将 已画 好 的 顺序 功能 图设 计成梯形 图 。 并通过 比较分析 总结 出三种 不同 图 2运 输 带 起 动 停 机 的顺 序 功 能 图 F i g . 2 T h e t r a n s p o r t b e l t s e q u e n c e f u n c t i o n c h a r t 设计 方 法 的 编 程 思 想及 各 自的 特 点 。 2 . 顺 序 控 制 梯 形 图 三 种 设 计 方 法 的应 用 举 例 M0 . O为初始步 。是等待起 动命令 的相对静 止的一 个状 图 1中的 两条 运 输 带顺 序 相连 。按 下 启动 按 钮 1 0 . 0 。 态, 用s M0 . 1的常 开触点作 为转换 条件 。 将初 始 步预置 为活 QO . 0变 为 oN 。 2号 运 输 带 开 始 运 行 。 1 0 S后 o0 . 1变 为 oN 。 动步 , 每 个顺序 功能 图至少应该有一 个初 始步 。当按 下启动 1号运 输 带 自动 起 动 。 按下停止按钮 1 0 . 1 , 停 机 的顺 序 与 起 动 按 钮 1 0 . O后 ,进 入 到 下 一 步 M O . 1步 。 即 2号 运 输 带 起 动 的 顺 序 刚好 相 反 。 间 隔 时 间为 8 S 。 ( QO . O为 oN) , 同时 T 3 7定 时 器 开 始 定 时 , 定时 1 0 S后 , T 3 7
PLC顺序控制梯形图的四种方式

PLC顺序控制设计法编制梯形图的四种方式季汉棋江苏省盐城市中等专业学校 224005摘要:本文通过一个实例,归纳总结了顺序控制设计法四种编程方式的思路和特点,并对它们进行了比较。
关键词:PLC,梯形图,顺序控制,起保停电路,步进梯形指令,移位寄存器,置位复位指令。
可编程控制器PLC外部接线简单方便,它的控制主要是程序的设计,编制梯形图是最常用的编程方式,使用中一般有经验设计法,逻辑设计法,继电器控制电路移植法和顺序控制设计法,其中顺序控制设计法也叫功能表图设计法,功能表图是一种用来描述控制系统的控制过程功能、特性的图形,它主要是由步、转换、转换条件、箭头线和动作组成。
这是一种先进的设计方法,对于复杂系统,可以节约60%--90%的设计时间.我国1986年颁布了功能表图的国家标准(GB6988.6—86)。
有了功能表图后,可以用四种方式编制梯形图,它们分别是:起保停编程方式、步进梯形指令编程方式、移位寄存器编程方式和置位复位编程方式。
本文以三菱公司F1系列PLC为例,说明实现顺序控制的四种编程方式。
例如:某PLC控制的回转工作台控制钻孔的过程是:当回转工作台不转且钻头回转时,若传感器X400检测到工件到位,钻头向下工进Y430当钻到一定深度钻头套筒压到下接近开关X401时,计时器T450计时,4秒后快退Y431到上接近开关X402,就回到了原位。
功能表图见图1。
一、使用起保停电路的编程方式起保停电路仅仅使用与触点和线圈有关的指令,无需编程元件做中间环节,各种型号PL C的指令系统都有相关指令,加上该电路利用自保持,从而具有记忆功能,且与传统继电器控制电路基本相类似,因此得到了广泛的应用。
这种编程方法通用性强,编程容易掌握,一般在原继电器控制系统的PLC改造过程中应用较多。
s7-200-plc-顺序控制梯形图的设计方法

梯形图总体结构:选择手动工作方式时手动 开关I2.0为1状态,将跳过自动程序,执行公 用程序和手动程序。选择自动工作方式时I2.0 为O状态,将跳过手动程序,执行公用程序和 自动程序。
例:某机械手用来将工件从A点搬运到B 点(图5-16),控制面板(图5-17),外部 接线图(图5-18)。
5.4.1 使用起保停电路的编程方法
用存储器位来代表步具有概念清楚、 编程规范、梯形图易于阅读和查错等优点。
5.1.2 选择序列的编程方法(分支、合并)
选择序列应用举例
5.1.3 并行序列编程方法(分支、合并)
5.2 以转换为中心的顺序控制梯形图设计 方法
5.2.1 单序列编程
1.特点:梯形图与转换实现的基本规则之间有 着严格的对应关系。在设计复杂的顺序功能图 的梯形图时既容易掌握,又不容易出错。
5.2.2 选择序列编程方法
5.2.3 并行序列编程方法
应用举例
5.3 使用SCR指令的顺序控制梯形图设计 方法
5.3.1顺序控制继电器指令 顺序控制继电器s专门用于编制顺序控制程序。
装 载 顺 序 控 制 继 电 器 (Load Sequence Control Relay) 指 令 “ LSCR s-bit” 用来 表 示一个SCR段(即顺序功能图中的步)的开始。
顺序控制继电器结束(sequence Control Relay End)指令SCRE用来表示SCR段的结束。
顺序控制继电器转换(sequence Control Relay Transition)指令“SCRT S-bit” 用来 表示SCR段之间的转换,即步的活动状态的转 换。
使用SCR时有如下的限制: 不能在不同的程序中使用相同的s位; 不能在SCR段之间使用JMP及LBL指令,即不
第6章 顺序控制梯形图的编程方式
1-6
PLC原理及应用 原理及应用
3、转换条件: 进入初始步的条件:M8002=1;T2=1。 进入初始步的条件:M8002=1;T2=1。 进入4秒步的条件:X0=1。 进入4秒步的条件:X0=1。 进入6秒步的条件:T0=1。 进入6秒步的条件:T0=1。 进入5秒步的条件:T1=1。 进入5秒步的条件:T1=1。 特别注意初始步的激活问题:用M8002的常开触点 特别注意初始步的激活问题:用M8002的常开触点 将初始步的编程元件置位。 4、各步的动作: 初始步的动作:Y0。 初始步的动作:Y0。 4秒步的动作:Y0、T0。 秒步的动作:Y0、T0。 6秒步的动作:Y1、T1。 秒步的动作:Y1、T1。 5秒步的动作:Y1、Y2、T2。 秒步的动作:Y1、Y2、T2。 二、根据分析画出时序图(见图6 所示) 二、根据分析画出时序图(见图6-2所示) 根据分析画出时序图
■
1-17
PLC原理及应用 原理及应用
三、跳步与循环次数的控制
S0
X04
相当 选择 分支
1、跳步(如图6-7所示) 、跳步(如图6 所示) 1)当S0处于活动状态,且X04=1时,将跳 处于活动状态, 04= 过S1步,由步S0进展到S2。称为正向跳步。 由步S 进展到S 称为正向跳步 正向跳步。 2)当S4处于活动状态,且X05=1时,将从 S4处于活动状态 处于活动状态, X05=1时 步S4返回到步S3。称为逆向跳步。 S4返回到步 。称为逆向跳步 返回到步S3 逆向跳步。 显然,跳步属于选择序列的一种特殊情况。 显然,跳步属于选择序列的一种特殊情况。 2、循环次数的控制 在设计梯形图时,经常遇到一些需要多次 重复的操作,此时可借助高级语言循环语句的 思想来设计顺序功能图和梯形图。逆向跳步
第5章 顺序控制梯形图的编程

线的方向相反,称为逆向跳步。显然,跳步属于选择
序列的一种特殊情况。
第6节 功能表图中跳步与循环问题 PLC编程
2.循环
在设计梯形图程序时,经常遇到一些需要多次重
复的操作,如果一次一次地编程,显然是非常繁琐的
。我们常常采用循环的方式来设计功能表图和梯形图
,如图5-34所示,假设要求重复执行10次由步S33和步
则执行该置位指令时,不能自动复位上一状态S。对步进 式控制,下一状态的置位指令须放在STL驱动的电路块,
并且一般放在该电路块的最后。
9)STL触点驱动的电路块中不能使用MC和MCR指令,但可 使用CJP和EJP指令;在转换条件对应的电路中,不能使
用ANB、ORB、MPS、MRD、MPP指令,可以用转换条
通,转换条件 满足,将由步S34进展到步S35。
在循环程序执行之前或执行完后,应将控
制循环的计数器复位,才能保证下次循环时循环
计数。复位操作应放在循环之外,图5-34中计数 器复位在步S0和步S25显然比较方便。
循环次数的控制和跳步都属于选择系列的特殊
情况。
小车控制系统——使用STL指令的编程方式梯形图
般用顺序控制设计法。
1.跳步 如图5-34所示用状态器来代表各步,当步S31是 活动步,并且X5变为“1”时,将跳过步S32,由步
S31进展到步S33。这种跳步与S31、 S32、 S33等组
成的“主序列”中有向连线的方向相同,称为正向跳
步。当步S34是活动步,并且转换条件时,将从步
S34返回到步S33,这种跳步与“主序列”中有向连
具有掉电保持功能, 掉电保持状态 S500~S899 400 停电恢复后需继续执行的场 合,可用这些状态元件 信号报警状态 S900~S999 100 用作报警元件
《机电传动与控制》PLC顺序控制梯形图的编程实验

《机电传动与控制》PLC顺序控制梯形图的编程实验
一、实验目的和要求
1.掌握顺序控制设计法
2.熟悉SFC设计、转换及仿真调试操作
二、实验内容和原理
1.分析控制要求、设计SFC及梯形图程序
2.程序下载及调试
三、主要仪器设备
编程计算机、S7-1200PLC、下载线(网线)
四、操作方法与实验步骤
1.按照实验要求设计程序
2.输入程序并完成调试
基本控制要求:设计启动机械手工件转运控制系统
按下启动按钮,机械手手爪下移-吸盘工作吸附工件-机械手手爪上移-机械手右转-机械手手臂伸出-机械手手爪下移-吸盘释放工件-机械手手爪上移-机械手手臂缩回-机械手左转,完成一个工作周。
如没有按过停止按钮,系统继续进行下一周期的操作。
按下停止按钮,当前工作周期的操作结束后,才停止操作,返回并停留在初始状态。
拓展控制要求:奇数个工件放到机械手正前方;偶数个工件放到侧方。
请按控制要求绘制PLC接线图,设计SFC、PLC程序并完成下载调试。
五、实验数据记录和处理
1.I/O分配表
2.PLC接线图
3.SFC
4.PLC梯形图程序
六、实验结果与分析(程序监控图片,选择各步活动时照片共三张)
七、讨论和心得。
PLC顺序控制设计法编制梯形图的几种方式
意性 , 尤其在设计复 杂系统的梯形 图时, 分析起来十分 困难 , 很容 易遗 漏一些应该考 虑 的问题 。而顺序控 制法是按 照生产工 艺预 先规定 的顺序进行 P C程序 设计 , 章可循 , 常容 易掌握。文章 以西 门子公 司的 s .0 L 有 非 72 0系列 P C L
为 例 , 明实 现 顺 序 控 制 设 计 法 的 四种 梯 形 图编 程 方 式 。 说
2 1 年 2月 01 第 1卷第 1 1 期
廊坊 师范学院学报 ( 自然科学版 )
Ju n l f a ga gT ah r o e e N tr a S i c dt n o r a o n fn ec es U g ( au n c n eE i o ) L C l e i
g a mi rm ng met d. ho
【 e od】 sq ec o t l eh d s u ni n t nc atl dr arm K yw rs eu ne nr to ;e e t f c o hr; d e ga c om q l a u i a i d
[ 中图分类号 ]T l Hl 2
[ 文献标识码 ]A
[ 文章编 号]17 64—3 2 (0 10 —0 3 —0 29 2 1 ) 1 0 3 3
1 引 言
可 编程 控制 器 P C外 部接 线 简单 方 便 , 的控 L 它 制 主要是 程 序 的设 计 , 梯形 图是最 常用 的编程语 言 , 编程 方法 一 般有 经验 设计 法 、 逻辑 设计 法 、 电器 控 继 制 电路移 植 法和顺 序 控制 设计 法 。其 中顺 序控 制 设
代替各 步 。它 采用 一种 被称 为 “ 顺序 功 能 图” 的图形 化语 言来 进 行 P C程 序 的组 织 和 设 计 。顺 序 功 能 L 图是描 述控 制 系统 的 控 制 过 程 、 能 和 特 性 的 一 种 功
PLC顺序控制梯形图的四种方式
PLC顺序控制设计法编制梯形图的四种方式季汉棋江苏省盐城市中等专业学校224005摘要:本文通过一个实例,归纳总结了顺序控制设计法四种编程方式的思路和特点,并对它们进行了比较。
关键词:PLC,梯形图,顺序控制,起保停电路,步进梯形指令,移位寄存器,置位复位指令。
可编程控制器PLC外部接线简单方便,它的控制主要是程序的设计,编制梯形图是最常用的编程方式,使用中一般有经验设计法,逻辑设计法,继电器控制电路移植法和顺序控制设计法,其中顺序控制设计法也叫功能表图设计法,功能表图是一种用来描述控制系统的控制过程功能、特性的图形,它主要是由步、转换、转换条件、箭头线和动作组成。
这是一种先进的设计方法,对于复杂系统,可以节约60%--90%的设计时间.我国1986年颁布了功能表图的国家标准(GB6988.6—86)。
有了功能表图后,可以用四种方式编制梯形图,它们分别是:起保停编程方式、步进梯形指令编程方式、移位寄存器编程方式和置位复位编程方式。
本文以三菱公司F1系列PLC为例,说明实现顺序控制的四种编程方式。
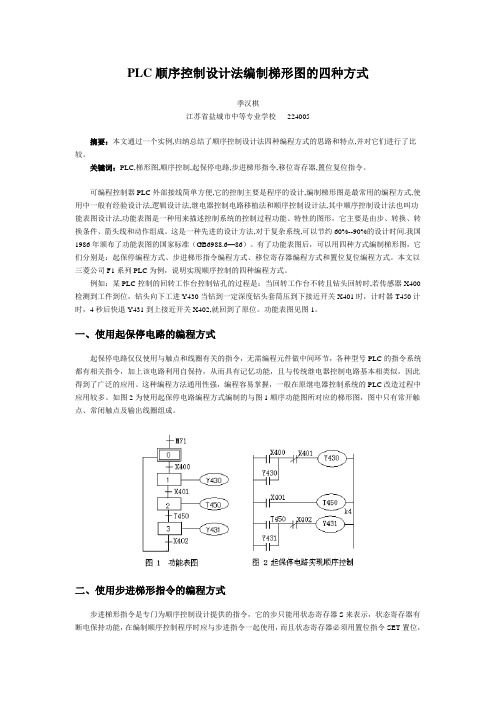
例如:某PLC控制的回转工作台控制钻孔的过程是:当回转工作台不转且钻头回转时,若传感器X400检测到工件到位,钻头向下工进Y430当钻到一定深度钻头套筒压到下接近开关X401时,计时器T450计时,4秒后快退Y431到上接近开关X402,就回到了原位。
功能表图见图1。
一、使用起保停电路的编程方式起保停电路仅仅使用与触点和线圈有关的指令,无需编程元件做中间环节,各种型号PLC的指令系统都有相关指令,加上该电路利用自保持,从而具有记忆功能,且与传统继电器控制电路基本相类似,因此得到了广泛的应用。
这种编程方法通用性强,编程容易掌握,一般在原继电器控制系统的PLC改造过程中应用较多。
如图2为使用起保停电路编程方式编制的与图1顺序功能图所对应的梯形图,图中只有常开触点、常闭触点及输出线圈组成。
二、使用步进梯形指令的编程方式步进梯形指令是专门为顺序控制设计提供的指令,它的步只能用状态寄存器S来表示,状态寄存器有断电保持功能,在编制顺序控制程序时应与步进指令一起使用,而且状态寄存器必须用置位指令SET置位,这样才具有控制功能,状态寄存器S才能提供STL触点,否则状态寄存器S与一般的中间继电器M相同。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
PLC顺序控制设计法编制梯形图的四种方式
1 引言
可编程控制器PLC外部接线简单方便,它的控制主要是程序的设计,编制梯形图是最常用的编程方式,使用中一般有经验设计法,逻辑设计法,继电器控制电路移植法和顺序控制设计法,其中顺序控制设计法也叫功能表图设计法,功能表图是一种用来描述控制系统的控制过程功能、特性的图形,它主要是由步、转换、转换条件、箭头线和动作组成。
这是一种先进的设计方法,对于复杂系统,可以节约60%~90%的设计时间.我国1986年颁布了功能表图的国家标准(GB6988.6-86)。
有了功能表图后,可以用四种方式编制梯形图,它们分别是:起保停编程方式、步进梯形指令编程方式、移位寄存器编程方式和置位复位编程方式。
本文以三菱公司F1系列PLC为例,说明实现顺序控制的四种编程方式。
例如:某PLC控制的回转工作台控制钻孔的过程是:当回转工作台不转且钻头回转时,若传感器X400检测到工件到位,钻头向下工进Y430当钻到一定深度钻头套筒压到下接近开关X401时,计时器T450计时,4s后快退Y431到上接近开关X402,就回到了原位。
功能表图见图1:
图1 功能表图
2 使用起保停电路的编程方式
起保停电路仅仅使用与触点和线圈有关的指令,无需编程元件做中间环节,各种型号PLC的指令系统都有相关指令,加上该电路利用自保持,从而具有记忆功能,且与传统继电器控制电路基本相类似,因此得到了广泛的应用。
这种编程方法通用性强,编程容易掌握,一般在原继电器控制系统的PLC改造过程中应用较多。
如图2为使用起保停电路编程方式编制的与图1顺序功能图所对应的梯形图,图2中只有常开触点、常闭触点及输出线圈组成。
图2 起保停电路实现顺序控制
3 使用步进梯形指令的编程方式
步进梯形指令是专门为顺序控制设计提供的指令,它的步只能用状态寄存器S来表示,状态寄存器有断电保持功能,在编制顺序控制程序时应与步进指令一起使用,而且状态寄存器必须用置位指令SET置位,这样才具有控制功能,状态寄存器S才能提供STL触点,否则状态寄存器S与一般的中间继电器M相同。
在步进梯形图中不同的步进段允许有双重输出,即允许有重号的负载输出,在步进触点结束时要用RET指令使后面的程序返回原母线。
把图1中的0-3用状态寄存器S600-S603代替,代替以后使用步进梯形指令编程,对应的梯形图如图3所示。
这种编程方法很容易被初学者接受和掌握,对于有经验的工程师,也会提高设计效率,程序的调试、修改和阅读也很容易,使用方便,程序也较短,在顺序控制设计中应优先考虑,该法在工业自动化控制中应用较多。
图3 步进指令实现顺序控制
4 使用移位寄存器的编程方式
从功能表图可以看出,在0-3各步中只有一个步在某时刻接通而其他步都在断开,把各步用中间继电器M200-M203代替,就很容易用移位寄存器实现控制。
图4为用移位寄存器编程时的梯形图,采用移位寄存器M200-M217的前四位M200-M203代表4个步,组成1个环形移位寄存器。
用移位寄存器主要是对数据、移位、复位3个输入信号的处理。
该方法设计的梯形图看起来简洁,所用指令也较少,但对较复杂控制系统设计就不方便,使用过程中在线修改能力差,在工业控制中使用较少,大多数应用在彩灯顺序控制电路中。
图4 移位寄存器实现顺序控制
5 使用置位复位指令的编程方式
如图5为使用置位复位编程方式编制的与图1顺序功能图所对应的梯形图。
在以置位复位指令的编程方式中,用某一转换所有前级步对应的辅助继电器的常开触点与转换对应的触点或电路串联,作为使所有后续步对应的辅助继电器置位和使所有前级步对应的辅助继电器复位的条件。
对简单顺序控制系统也可直接对输出继电器置位或复位。
该方法顺序转换关系明确,编程易理解,一般多用于自动控制系统中手动控制程序的编程。
图5 置位复位指令实现顺序控制
以上四种顺序控制编程方式各有特点,可以根据实际情况选择一种来编制梯形图,它们的一般比较见附表。
教学实践表明这些编程方式很容易被初学者接受和掌握,用它们可以得心应手地设计出任意复杂的顺序控制程序。
6 结束语
采用功能表图的四种方式来编制梯形图,可适应于不同场合,供工程技术人员视工艺要求决定。
它是一种先进的设计方法,对于复杂系统,能节省(60~90)%的时间。