模糊控制期末作业
模糊控制习题2
模糊控制习题1、举出有限论域上的一个模糊集,并用三种形式表示之。
2、设论域 U ={u 1, u 2, u 3, u 4, u 5};A =(0.2 0.1 0.5 1 0.7);B =(0.4 0.8 0.9 0 0.2);C =(0.1 0.7 0.6 0.4 0.3),试求A ∪B ,A ∩B ,A C ,(A ∪B )∩C 。
3、对企业论域 U ={u 1, u 2, u 3, u 4, u 5, u 6},有A =“大企业”=(0.4 0.3 0.7 0.2 0.5 0.8);B =“小企业”=(0.5 0.6 0.5 0.7 0.4 0.3);试求 (1) C =“非大企业”; (2) D =“非小企业”;(3) E =“或大或小企业”; (3) F =“中型企业”。
4、给定模糊集合A 、B 和C ,确定他们的λ切割。
{}221()(2,1),(3,0.8),(4,0.6),(5,0.4),(6,0.2),(7,0.4),(8,0.6),(9,0.8),(10,1)0.2,0.51()0.2,0.5;[0,]1(10)010()0.3,0.5;[0,]10(1(10))A B C x x x x x x x x x μαμαμα-=====∞+-≤⎧===∞⎨>+-⎩ 123451234512351351335{,,,,}{,,,,}0.2{,,,}0.5{,,}0.60.7{,}0.2{}U u u u u u u u u u u u u u u A u u u u u u A λλλλλλ=⎧=⎪=⎪⎪==⎨⎪=⎪=⎪⎩、若, 试用分解定理求。
26{0,1,2,3,4,5}{0,1,2,,25}:() (0.2 0.4 0.8 0.1 1 0.5)()x y f x y x f x x x A f A ==→→== 、设 , 有映射 , 在 中定义 ,求 。
7、双边高斯函数MF ,由下式定义:211111221222221exp 2(,,,,)11exp 2s x c x c gauss x c c c x c x c c xσσσσ⎧⎡⎤⎛⎫-≤⎪⎢⎥-⎪⎪⎢⎥⎝⎭⎣⎦⎪⎪=<<⎨⎪⎡⎤⎛⎫-⎪⎢⎥-⎪⎪≤⎢⎥⎝⎭⎪⎣⎦⎩1)编一个MATLAB 程序实现上述MF ;2)对不同的参数画出这个MF ; 3)找出该MF 的交叉点和宽度。
模糊控制设计例题

3-4 已知某一加炉炉温控制系统,要求温度保持在600℃恒定。
目前此系统采用人工控制方式,并有以下控制经验(1) 若炉温低于600℃,则升压;低得越多升压越高。
(2) 若炉温高于600℃,则降压;高得越多降压越低。
(3) 若炉温等于600℃,则保持电压不变。
设模糊控制器为一维控制器,输入语言变量为误差,输出为控制电压。
两个变量的量化等级为七级、取五个语言值。
隶属度函数根据确定的原则任意确定。
试按常规模糊逻辑控制器的设计方法设计出模糊逻辑控制表。
模糊控制器选用的系统的实际温度T 与温度给定值T d 的误差d e T T =-作为输入语言变量,把控制加热装置的供电电压u 选作输出语言变量。
模糊输出量隶属度函数控制规则规则1、如果误差e 是NB ,则控制U 为NB; 规则2、如果误差e 是NS ,则控制U 为NS; 规则3、如果误差e 是ZE ,则控制U 为ZE; 规则4、如果误差e 是PS ,则控制U 为PS; 规则5、如果误差e 是PB ,则控制U 为PB; 由上可得 (3)0.4PS μ= 10.4U PS=(3)1PB μ= 21U PB=120.41U U U PSPB=+=+控制输出:00.4500.43515046.66670.40.41v ⨯+⨯+⨯==++误差(2)1PS μ= 11U PS=(2)0.3PS μ= 20.3U PB=120.31U U U PSPB=+=+精确化 控制输出:00.340140400.31v ⨯+⨯==+(1)0.1ZE μ= 10.1U ZE = (1)0.4PS μ= 20.4U PS=120.10.4U U U ZEPS=+=+控制输出:00.4350.4500.1350.125400.40.40.10.1v ⨯+⨯+⨯+⨯==+++(1)0.4N S μ-= 10.4U N S= 20.1U ZE=120.10.4U U U ZEN S=+=+00.4100.4250.1250.135200.40.40.10.1v ⨯+⨯+⨯+⨯==+++(2)0.3NB μ-= 10.3U N B= (2)1N S μ-= 21U N S=120.31U U U N BN S=+=+控制输出:00.320120200.31v ⨯+⨯==+(3)1N S μ-= 11U N B =(3)0.4NS μ-= 20.4U N S=120.41U U U N BN S=+=+:00.4250.41011013.33330.40.41v ⨯+⨯+⨯==++因此模糊逻辑控制表。
模糊控制习题一

一、完成下述模糊集合的基本运算:1、设论域为 12345678{x ,x ,x ,x ,x ,x ,x ,x }X =A 和B 为论域X 上的两个模糊集合已知:1234567812456780.20.40.60.8 1.00.80.50.2A x x x x x x x x 0.50.7 1.00.80.60.40.2B x x x x x x x =+++++++=++++++试计算:A B, A B, A (B A) 。
解: =B A 876543212.05.08.00.10.16.07.05.0X X X X X X X X +++++++;87654212.04.06.08.08.04.02.0X X X X X X X ++++++=B A ;876543218.05.08.00.18.06.04.05.0)(X X X X X X X X A B +++++++=A ;2、设X 、Y 、Z 为论域,X 到Y 的模糊关系为R ,Y 到Z 的模糊关系为S 。
已知模糊关系矩阵为:0.30.60.80.10.50.30.80.50.20.70.40.90.70.2R , S=0.90.10.80.50.10.40.50.30.40.20.60.40.10.9⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦, 试求:X 到Z 的模糊关系。
分析:由于R 是X →Y 上的模糊关系,S 是Y →Z 上的模糊关系。
则X →Z 上的模糊关系为R 与S 的模糊合成。
解:编程实现本题的运算程序如下: #include <iostream.h> void main(){float d[4]={0};float a[4][4]={{0.3,0.6,0.8,0.1},{0.5,0.2,0.7,0.4},{0.9,0.1,0.8,0.5},{0.3,0.4,0.2,0.6}};floatb[4][3]={{0.5,0.3,0.8},{0.9,0.7,0.2},{0.1,0.4,0.5},{0.4,0.1,0.9}};float c[4][3]={0}; int i,j,k;for (i=0;i<4;i++)for (k=0;k<3;k++) { for (j=0;j<4;j++) {d[j]=(a[i][j]>b[j][k])?b[j][k]:a[i][j];if (d[j]>d[0]) d[0]=d[j]; c[i][k]= d[0]; }cout<<c[i][k]<<"\t";}}运行上述程序可知:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=6.0085.05.04.04.04.06.04.05.05.06.0S R二、用于模糊控制的不确定性推理定义论域为X ={x1, x2, x3, x4, x5};Y ={y1, y2, y3, y4, y5} 已知在论域X 上定义如下模糊子集:*0.20.40.60.8 1.01x2x3x4x50.71.00.80.60.3x1x2x3x4x5A x A =++++=++++并在论域Y 上定义如下模糊子集:0.20.50.7 1.00.81y2y3y4y5y ++++B=若有如下模糊规则if x is A then y is B试完成推理:如果x 是*A ,求*B 。
模糊控制大作业

模糊控制作业一.题目要求已知4802216001s G e s -=+,分别设计PID 控制与模糊控制,使系统达到较好性能,并比较两种方法的结果。
PID/FCG(s)yr_e具体要求: 1、采用fuzzy 工具箱或编程实现模糊控制器。
2、分析量化因子和比例因子对模糊控制器控制性能的影响。
3、分析系统在模糊控制和PID 控制作用下的抗干扰能力(加噪声干扰)、抗非线性能力(加死区和饱和特性)、抗时滞的能力(对时滞大小加以改变)和结构变化的能力(1阶系统变2阶以上系统)。
4、为系统设计模糊PID 控制器(选作)。
二.构建Simulink 仿真模型1.采用PID 控制 1)PID 控制器的设计图1 PID 控制器仿真结构图其中,设置PID Controller 的Kp=0.10,Ki=0.00005,Kd=0,Transport Delay 的的延迟时间为480.2)PID 控制系统的仿真图及分析仿真结果分析:调节时间ts=1520s,上升时间tr 为700s 超调量9.3%,延迟时间td 为2250s 。
由图1-2可见,PID 控制器的调节时间较长,原因可能是三个参数的调解未达到最佳状态,具体是因为三个参数对于三阶加延时环节的被控对象只能通过经验试凑法来不断调节,所以很难达到最佳状态,该题中延迟环节的时间常数已经达到480,若Kp设置过大,会影响系统稳定导致震荡,采用常规PID控制的效果并不令人满意。
图2.PID控制系统响应曲线2.采用模糊控制1)模糊控制器的设计根据系统实际情况,选择e,de和u的论域e range : [-6 6]ec range: [-6 6]u range: [-6 6]2) e,de和u语言变量的选取e 7个:NB,NM,NS,ZO,PS,PM,PBec 7个:NB,NM,NS,ZO,PS,PM,PBu 7个:NB,NM,NS,ZO,PS,PM,PB3) 模糊规则确定u eNB NM NS ZO PS PM PBec NB PB PB PM PM PS ZO ZO NM PB PB PM PM PS ZO ZOec NS PB PB PM PS ZO NM NM ZO PB PB PM ZO NM NB NB PS PM PM ZO NS NM NB NB PM ZO ZO NS NM NM NB NB PB ZO ZO NS NM NM NB NB表1 模糊规则表图3.模糊控制规则的添加图4.模糊控制器的输出量4) 隐含和推理方法的制定隐含采用‘mamdani’方法: ‘max-min’推理方法,‘min‘方法去模糊方法:重心法选择隶属函数的形式:三角型。
模糊控制例题
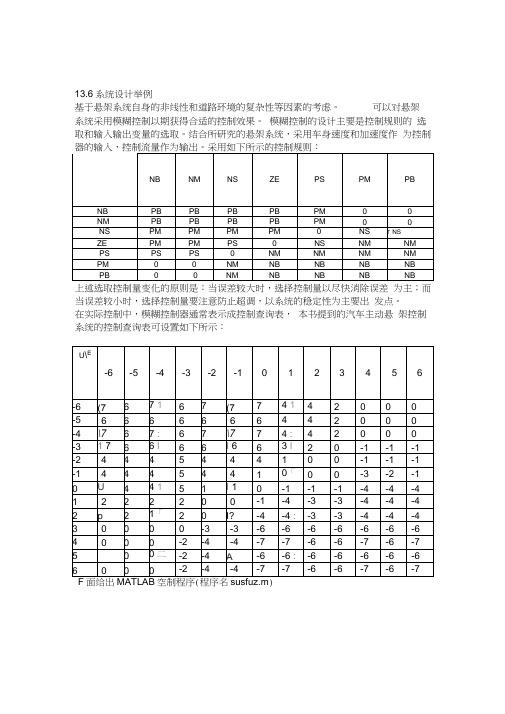
13.6系统设计举例基于悬架系统自身的非线性和道路环境的复杂性等因素的考虑。
可以对悬架系统采用模糊控制以期获得合适的控制效果。
模糊控制的设计主要是控制规则的选取和输入输出变量的选取。
结合所研究的悬架系统,采用车身速度和加速度作为控制上述选取控制量变化的原则是:当误差较大时,选择控制量以尽快消除误差为主;而当误差较小时,选择控制量要注意防止超调,以系统的稳定性为主要出发点。
在实际控制中,模糊控制器通常表示成控制查询表,本书提到的汽车主动悬架控制系统的控制查询表可设置如下所示:% Fuzzy Control Of Active Suspension% +++++++++++++++++++++++++++++ x0=5e-3; % unit length beta=100;beta=628; ps=90.0e5;T=1e-3; fxr=1/beta; % frequenecyTs=T*beta; % sampling time% +++++++++++++++++++++++++++ ke=300; %kec=200;ku=0.025/7; % ku=0.15/7;% +++++++++++++++++++++++++++++++ load susmoda.dat; load susmodb.dat;load susmodbw.dat load susmodc.datA=susmoda;B=susmodb; Bw=susmodbw;C=susmodc;D=0; %Samplingtime beta=628; dt=4.e-3*beta;%+++++++++++++++++++++++++++++++++++++++ % start simulate sim_time=4*beta;n=fix(sim_time/Ts);m=5; xb0=0;[Ad,Bd]=c2d(A,B,Ts); [Ad,Bwd]=c2d(A,Bw,Ts);X(m,n)=0;for i=2:n xr(i-1)=sin(2*pi*fxr*i*Ts);dxb(i-1)=X(2,i-1);if i>6dxb(i-1)=(X(2,i-1)+X(2,i-3)+X(2,i-5))/3;endif i==2dxr(i-1)=0.05;xb(i-1)=0;elsedxr(i-1)=(xr(i-1)-xr(i-2))/Ts;xb(i-1)=dxb(i-1)*Ts+xb(i-2);ende(i-1)=0-dxb(i-1);if i==2ec(i-1)=0;Ec(i-1)=0;elseec(i-1)=(e(i-1)-e(i-2))/Ts;endif e(i-1)<-0.1e(i-1)=-0.1;elseif e(i-1)>0.1e(i-1)=0.1;endif ec(i-1)<-0.6ec(i-1)=-0.6elseif ec(i-1)>0.6ec(i-1)=0.6;endE(i-1)=round(e(i-1)*ke);if E(i-1)<-6E(i-1)=-6;elseif E(i-1)>6E(i-1)=6;endEc(i-1)=round(ec(i-1)*kec); if Ec(i-1)<-6Ec(i-1)=-6;elseif Ec(i-1)>6Ec(i-1)=6;endrow(i-1)=round(E(i-1)+7); col(i-1)=round(Ec(i-1)+7);rules=[7 6 7 6 7 7 7 4 4 2 0 0 06 6 6 6 6 6 6 4 4 2 0 0 07 6 7 6 7 7 7 4 4 2 0 0 07 6 6 6 6 6 6 3 2 0 -1 -1 -14 4 45 4 4 4 1 0 0 -1 -1 -14 4 45 4 4 1 0 0 0 -3 -2 -14 4 45 1 1 0 -1 -1 -1 -4 -4 -42 2 2 2 0 0 -1 -4 -4 -3 -4 -4 -41 2 1 2 0 -3 -4 -4 -4 -3 -4 -4 -40 0 0 0 -3 -3 -6 -6 -6 -6 -6 -6 -60 0 0 -2 -4 -4 -7 -7 -7 -6 -7 -6 -70 0 0 -2 -4 -4 -6 -6 -6 -6 -6 -6 -60 0 0 -2 -4 -4 -7 -7 -7 -6 -7 -6 -7];u(i-1)=-rules(row(i-1),col(i-1))*ku; X(:,i)=Ad*X(:,i-1)+Bd*u(i-1)+Bwd*dxr(i-1); end% +++++++++++++++++++++++++++% plot% +++++++++++++++++++++++++++t=1:length(xb);figure(1)plot(t,xr, 'b' ,t,xb, 'r' )title( 'displace' );xlabel( 'time(ms)' );ylabel( 'displace(cm)' );gridfigure(2)plot(t,dxr 'b' ,t,dxb, 'r' )title( 'velocity' );xlabel( 'time(ms)' );ylabel( 'velocity' );grid程序运行后的控制效果图如图13. 所示:% index table% control signal500 1000150020002500300035004000time(ms)(a )位移对比velocity0.050.040.030.020.01-0.01-0.02500100015002000 2500300035004000time(ms)(b )速度对比图13.14主动悬架模糊控制效果displace-0.6 -0.8 -12 0 2- 丿 mQUDCOLQacu4-。
模糊控制期末模拟考试试卷及答案

模糊控制期末模拟考试试卷及答案模糊控制期末模拟考试试卷及答案第一部分模糊控制期末模拟考试试卷第一大题(70分)某控制系统如下图所示。
取离散部分采样周期T=0.001秒,控制器输出为[-20,20] ;t=0时刻起施加给定R=20, t=1s时刻起施加负载扰动LOAD=5;系统参数J 0.05 0.03。
要求为系统开发设计如下几种控制器,并以MATLAB为手段开展仿真实验及对比研究。
考察系统的性能指标主要有:上升时间、调节时间、超调量、稳态误差、抗负载扰动能力、对参数变化的适应能力。
2.以系统误差和误差变化量为输入信号设计MAMDAN型模糊控制器。
(30分)3.以系统误差和误差变化量为输入信号设计T-S型模糊控制器。
模糊控制期末模拟考试试卷及答案(10 分)4.设计一种自适应模糊控制器。
(15分)5.对以上控制器的控制性能进行比较,得到明确结论。
(5分)第二大题:(25分)撰写一篇论文,综述模糊逻辑原理在你所从事的研究领域或即将从事的研究领域中的应用情况。
字数在4000左右,附上参考文献。
附:第一大题注意事项①注重细节和过程②给出所有的仿真结果③问题分析的深入性④给出明确结论第二大题注意事项①论文书写的规范性②文献阅读的广泛性③使用文献的代表性④有自己的观点模糊控制期末模拟考试试卷及答案第二部分模糊控制期末模拟考试答案 第一大题(70分)某控制系统如下图所示。
取离散部分采样周期 T=0.001秒,控制 器输出为[-20,20] ; t=0时刻起施加给定 R=20, t=1s 时刻起施 加负载扰动LOAD=5 ;系统参数J 0.05 0.03。
要求为系统开发 设计如下几种控制器,并以MATLAB 为手段开展仿真实验及对比研 究。
考察系统的性能指标主要有:上升时间、调节时间、超调量、 稳态误差、抗负载扰动能力、对参数变化的适应能力。
*连续部分1.按Z-N 法(或其它方法)设计常规 PID 控制器。
(10分)(1)系统结构: 1 C JS 0.001离散部分 *控制器0.4 0.001S 1 LOAD十。
模糊控制大作业
作业一:模糊控制作业(40分):以双输入—单输出系统为例,1、画出模糊控制程序流程图;2、计算出模糊控制器的查询表,写出必要的计算步骤。
假设控制器输入为误差e 和误差变化率ec,输出为控制量u ,其基本论域分别为[e min ,e max ],[ec min ,ec max ],[u min ,u max ],对应的语言变量E 、EC 和U 的论域为{-6,-5,…,-1,0,1,…,5,6},E 、EC 和U 都选7个语言值{NB ,NM ,NS ,Z ,PS ,PM ,PB},各语言值的隶属函数采用三角函数,其分布可用表1表示,控制规则如表2所示。
注意:u 的去模糊化要采用与你的学号ID 的奇偶性对应的方法,设ID=奇数者用最大隶属度法,ID=偶数者用重心法。
表1 语言变量E 、EC 和U 的赋值表10.5PB0 0.5 1 0.5 0 0 0 0 0 0 0 0 0 PM 0 0 0 0.5 1 0.5 0 0 0 0 0 0 0 PS 0 0 0 0 0 0.5 1 0.5 0 0 0 0 0 Z 0 0 0 0 0 0 0 0.5 1 0.5 0 0 0 NS 0 0 0 0 0 0 0 0 0 0.5 1 0.5 0 NM 0 0 0 0 0 0 0 0 0 0 0 0.5 1 NB 6 5 4 3 2 1 0 -1 -2 -3 -4 -5 -6表2模糊控制规则表PBPBPBPBPMZZPBPB PB PB PB PM Z Z PM PM PM PM PM Z NS NS PS PM PM PS Z NS NM NM Z PS PS Z NM NM NM NM NS Z Z NM NB NB NB NB NM Z Z NM NB NB NB NB NB EPB PM PS Z NS NM NBECU10月24-27日交纸质版到新主楼A405一、控制算法流程图(1)模糊控制算法一般双输入—单输出模糊控制器的控制规则可写成条件语句:if and E=B then U=C ,i=1,2,,;1,2,,;i j ijE A n j n =∆=式子中,、B 、C i j ijA 为定义在误差、误差变化率和控制量论域X 、Y 、Z 上的模糊集合。
智能控制-模糊控制
智能控制大作业报告模糊部分姓名:学号:专业:2011年06月03日题目:已知()()0.5250.528sG e s s s -=+++,分别设计PID 控制与模糊控制,使系统达到较好性能,并比较两种方法的结果。
PID/FCG(s)yr_e具体要求:1、采用Fuzzy 工具箱实现模糊控制器。
2、分析量化因子和比例因子对模糊控制器控制性能的影响。
3、分析系统阶数发生变化时模糊控制和PID 控制效果的变化。
4、分析系统在模糊控制和PID 控制作用下的抗干扰能力(加噪声干扰)、抗非线性能力(加死区和饱和特性)以及抗时滞的能力(对时滞大小加以改变)。
一 原系统仿真分析原系统是一个带有时滞环节的三阶系统,系统的三个极点均在s 域左半平面,系统是稳定的。
利用Matlab/Simulink 工具箱搭建系统框图,对原系统进行阶跃响应分析。
原系统框图如图1所示:图1 原系统框图设定仿真时间为10秒,其它为默认设置,运行程序,可以得到如图2所示仿真结果。
0123456789100.10.20.30.40.50.60.7t/s原系统阶跃响应图2 原系统阶跃响应曲线由图可以看出,原系统是稳定的,但是稳态误差比较大。
二 PID控制器设计根据上述仿真分析,可以知道系统性能比较差,因此设计初步设计PID控制器以在一定程度上改善系统性能。
PID参数的整定采用尝试的方法,遵循先比例后积分再微分的整定顺序,达到保持两个周期、前后超调比约为1:4的理想响应波形。
带PID控制器的系统框图如图3所示:图3 PID控制系统框图其中PID控制器参数如图4所示:图4 PID参数设置设定仿真时间为20s ,运行程序,可以得到如图5所示仿真结果:246810121416182000.20.40.60.811.21.4t/sS t e pPID 控制响应图5 PID 控制阶跃响应曲线由图可以看出,增加PID 控制的系统能够完全消除稳定误差,且具有较小的超调和较短的调节时间,极大程度地改善了系统的性能。
模糊控制PID设计大作业 -
参考教材中例子设计一包含了模糊技术与PID 技术的混合智能控制器,其被控对象为:2 4.23()( 1.648.46)p G s s s =++采样时间为1ms ,编写matlab 仿真程序,确定其在阶跃输入的响应结果,并与经典PID 控制仿真结果相比较。
要求详细描述控制系统的设计,控制系统工作流程,模糊系统中的输入输出的隶属函数设计及其采用的模糊规则,分析仿真结果并进行总结。
表1 Δkp 的模糊规则表表2 Δki 的模糊规则表表3 Δkd的模糊规则表Kp,ki,kd的模糊控制规则表建立好以后,可根据以下方法进行kp,ki,kd的自适应校正。
将系统误差e和误差变化ec变化范围定义为模糊集上的论域,即e,ec = {-3,-2,-1,0,1,2,3},其模糊子集为e,ec = {NB,NM,NS,ZO,PS,PM,PB},子集中元素分别代表负大,负中,负小,零,正小,正中,正大。
应用模糊合成推理设计PID参数的整定算法。
第k个采样时间的整定为Kp(k)=kp0+Δkp(k)Ki(k)=ki0+Δki(k)Kd(k)=kd0+Δkd(k)在线运行过程中,控制系统通过对模糊逻辑规则的结果处理、查表和运算,完成对PID参数的在线自校正。
其工作流程图如下图所示。
图1 误差的隶属函数图2 误差变化率的隶属函数图3 kp的隶属函数图4 ki的隶属函数图5 kd的隶属函数图6 模糊系统fuzzpid.fis的结构图7 模糊推理系统的动态仿真环境在程序PID_b.m中,利用所设计的模糊系统fuzzpid.fis进行PID控制参数的整定,并利用模糊PID控制进行阶跃响应,在第300个采样时间时控制器输出端加上1.0的干扰,响应结果及PID控制参数的自适应变化如图8到13所示。
图8 模糊PID控制阶跃响应图9 模糊PID控制误差响应图10 控制器输入u图12 ki的自适应调整在对三阶线性系统的控制中,利用稳定边界法进行参数整定的经典PID控制的超调量比模糊PID控制的超调量要大,但模糊PID控制存在一定的稳态误差。
模糊控制综合练习参考
模糊控制综合练习参考资料实验一模糊工具箱的使用一、实验目的1、掌握Matlab模糊工具箱的应用。
2、掌握模糊集合的基本运算。
3、能够使用Simulink工具箱设计模糊控制系统。
二、实验设备1、PC机2、Matlab软件三、实验内容第一步:打开模糊推理系统编辑器步骤:在Commond Window 键入fuzzy 回车打开如下窗口,既模糊推理系统编辑器第二步:使用模糊推理系统编辑器本例用到两个输入,两个输出,但默认是一个输人,一个输出步骤:1、添加一个输入添加一个输出得如下图2、选择Input、output(选中为红框),在Name框里修改各输入的名称并将And method 改为prod,将Or method 改为 probor提示:在命名时’_’在显示时为下标,可从上图看出。
第三步:使用隶属函数编辑器该编辑器提供一个友好的人机图形交互环境,用来设计和修改模糊推理系中各语言变量对应的隶属度函数的相关参数,如隶属度函数的形状、范围、论域大小等,系统提供的隶属度函数有三角、梯形、高斯形、钟形等,也可用户自行定义。
步骤:1、双击任何一个输入量(In_x、In_y)或输出量打开隶属度函数编辑器。
2、在左下处Range和Display Range处添加取值范围,本例中In_x和In_y的取值范围均为[0 10], Out_x和Out_y的取值范围均为[0 1]3、默认每个输入输出参数中都只有3个隶属度函数,本例中每个输入输出参数都需要用到五个,其余几个需要自己添加:选中其中一个输入输出参数点击Edit菜单,选Add MFS…打开下列对话框将MF type设置为trimf(三角形隶属度函数曲线,当然你也需要选择其他类型)将Number of MFs 设置为2,点击OK按钮同样给其他三个加入隶属度函数4、选中任何一个隶属度函数(选中为红色),在Name 中键入名称,在Type中选择形状,在Params中键入范围,然后回车如下图:本例中:In_x,In_y隶属度函数相同,如下Out_x,Out_y隶属度函数相同,如下:5、关闭隶属函数编辑器第四步:使用规则编辑器通过隶规则编辑器来设计和修改“IF...THEN”形式的模糊控制规则。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机械工程学院2015-2015学年第二学期2014级研究生《模糊控制》试题姓名王浦舟成绩一、综述模糊控制技术的发展概况和发展趋势(从任何一个方面论述均可)。
(10分)答:模糊控制技术的发展概况:模糊控制系统已经应用于各个行业和各类实际应用中,同时也出现广不少开发模糊控制系统的软件工具,甚至应用于社会科学领域。
模糊控制在各种过程控制中都有应用,工业炉方面,退火炉、电弧炉、水泥窑、热风炉、煤粉炉一般采用模糊控制;石化方面,蒸馏塔、废水pH值、污水处理等也采用计算机进行模糊控制;煤矿行业,选矿破晬过程、煤矿供水等也是进行模糊控制。
模糊控制的控制系统的优点有:①模糊控制是一种基于规则的控制,在设计中不需要建立被控对象的精确数学模型,对于具有一定操作经验而非控制专业的工作者,模湖控制方法易于掌握,系统机观和策略易于接受与理解,设计简单,便于应用。
②模糊控制座接采用语言型控制规则,在工业过程从定性认识出发,比较容易建立语言控制规则,而模糊控制对那些数学模型难以获取、动态特性不易掌握或变化显著的对象非常适用。
③模糊控制系统的鲁棒性强,干扰和参数变化对控制效果的影响被大大减弱,允其适合于非线性、时变及纯滞后系统的控制。
④基于模型的控制箅法及系统设计方法,由于出发点和性能指标的不同、容易导致较大差异,但一个系统的语言控制规则却具有相对的独立性,利用这些控制规律间的模糊连接,容易找到折中的选择,采用模糊控制设计的系统动态响应品质优于常规的P1D控制,并且过程参数的变化具奋较强的适应性。
⑤模糊控制算法是基于启发性的知识及语言决策规则设计的,这使得操作人员易于通过人的自然语言进行人机界面联系,这些模糊条件语言很容易加入到过程控制环节上。
通过模拟人工控制的过程和方法,增强控制系统的适应能力,使之具有一定的智能水平。
模糊控制的缺点有:①信息简单的模糊处理将导致系统的控制精度降低和动态品质变差。
②模糊控制的设计尚缺乏系统性,这对复杂系统的控制是难以奏效的。
③获得模糊规则及隶属函数的方法即为系统的设计办法,在目前完全凭经验进行。
糊控制理论需解决的问题主要是尽管模糊控制理论已经取得了可观的进展,但与常规控制理论相比仍不成熟。
模糊模控制系统的分析和设计尚未建立起有效的方法,在很多场合下仍然需要依靠经验和试凑。
另—方面,常规模糊控制需要不断改进稳态控制情度和提高智能水平与适应能力。
从大量文献中可以看出,在实际应用中往住是将模糊控制或模糊推理的思想.与其他相对成熟的控制理论或方法结合起来,发挥各自的长处,从而获得押想的控制效果。
模糊控制与神经网络相结合的方法已成为研究的热点, 二者的结合有效地推动了自学习模糊控制的发展。
二、设电炉温度设定值为3000度,温度误差的控制精度为±4‰,误差e 的论域为[-6+6],误差e ~的模糊集合的量化等级为X ~={ -6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6};误差变化率的控制精度为±5,误差变化率e 的论域取[-5,5],误差变化率ce ~的模糊集合的量化等级为Y ~={ -5,-4,-3,-2,-1,0,1,2,3,4,5},控制量*u 的实际控制范围为0~10mA ,控制量*u 的基本论域为[0 +10],控制量u~的模糊集合的量化等级为Z ~={ 0,1,2,3,4,5,6,7,8, 9,10},采用模糊控制(FC )。
完成1)计算三个量化因子e K 、ec K 、u K ?2)计算三个量化值E 、C E 和U ?(15分)解:根据题意,误差e 的论域范围为[min e ,max e ]=[-6,6],误差的实际调整范围为3000*±5‰,即[1α,1β]=[-15,15];误差变化率e的论域范围为[min e ,max e ]=[-5,5],误差变化率的实际控制精度为±5,即[2α,2β]=[-5,5];控制量u*的实际控制范围为[3α,3β]=[0,10],基本论域为[min u ,max u ]=[0,10]。
所以:1)量化因子:4.0)15(15)6(611min max =----=--=αβe e K e1)5(5)5(522min max =----=--=αβe e K ec1010010min max 33=--=--=u u K u αβ2) 量化值:]5.0)21515(4.0[]5.0)2([11±--⋅=±+-=eINT eK INT E e βα ]5.04.0[±=e INT ]5.0)255(1[]5.0)2([22±--⋅=±+-=eINT eK INT E ec C βα ]5.0[±=eINT 5210012**33*+=++⋅=++=u u u k U u βα三、已知双输入单输出模糊系统,其输入量为x 和y ,输出量为z ,设模糊子集X ={}321,,a a a 、Y ={}321,,b b b 、Z ={}321,,c c c ,其输入输出关系可用如下两条模糊规则描述:(15分)1~R :if x 是1~A and y 是1~B ,then z 是1~C现已知输入为:x 是2~A and y 是2~B ,求输出量z 的模糊集合2~C .1~A =3212.05.09.0a a a ++,1~B =3213.06.07.0b b b ++,1~C =3211.04.08.0c c c ++ 2~A =3213.04.06.0a a a ++,2~B =3216.08.06.0b b b ++ 要求:用手工计算,并编程进行验算。
(编程语言任意选取)。
1、计算部分:解:(1) 计算模糊关系R~: (a) 计算1~A与1~B 的笛卡尔积: 11~~B A ⨯=()⎪⎪⎪⎭⎫⎝⎛=⎪⎪⎪⎭⎫ ⎝⎛2.02.02.03.05.05.03.06.07.03.06.07.02.05.09.0(b) 将11~~B A ⨯写成列向量:⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛=⨯2.02.02.03.05.05.03.06.07.0)~~(111T B A (c) 由1)~~(11T B A ⨯和C ~计算模糊关系R ~: ()⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛=⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛=⨯⨯=1.02.02.01.02.02.01.02.02.01.03.03.01.04.05.01.04.05.01.03.03.01.04.06.01.04.07.01.04.08.02.02.02.03.05.05.03.06.07.0~)~~(~111C B A R T (2) 基于模糊合成规则,求2~C : (a) 计算2~A与2~B 的笛卡尔积: =⨯22~~BA ()⎪⎪⎪⎭⎫⎝⎛=⎪⎪⎪⎭⎫ ⎝⎛3.03.03.04.04.04.06.06.06.06.08.06.03.04.06.0 (b) 将22~~B A⨯写成列向量: ()91223.03.03.04.04.04.06.06.06.0)~~(2⨯=⨯T B A (c) 由2)~~(22T B A ⨯和模糊关系R~计算出输出模糊集合2~C : RB AC T~)~~(~2222 ⨯=()⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛=1.02.02.01.02.02.01.02.02.01.03.03.01.04.05.01.04.05.01.03.03.01.04.06.01.04.07.03.03.03.04.04.04.06.06.06.0()1.04.06.0= 即,32121.04.06.0~C C C C++=。
2、编程部分(MATLAB ):a=[0.9;0.5;0.2]; b=[0.7 0.6 0.3]; c=[0.8 0.4 0.1]; a2=[0.6;0.4;0.3]; b2=[0.6 0.8 0.6]; m=size(a,1); n=size(b,2); for i=1:n for j=1:mab(i,j)=min([a(i,:);b(:,j)]); end end z=ab'; e=z(:); t=size(e,1); s=size(c,2); for i=1:t for j=1:sk(i,j)=min([e(i,:);c(:,j)]); end endm=size(a2,1); n=size(b2,2); for i=1:n for j=1:ma2b2(i,j)=min([a2(i,:);b2(:,j)]); endendh=a2b2';x=h(:);y=x';p=size(k,2);for j=1:pf(1,j)=max(min([y(1,:);k(:,j)']));endi=f验证结果:四、利用模糊逻辑工具箱的图形用户界面GUI建立模糊推理系统FIS。
考虑两个输入、一个输出的模糊推理问题。
要求:(1)模糊推理对象自己设定(不能用上课讲解的推理对象),所有模糊语言变量、论域、隶属度函数及其模糊控制规则自己定义,模糊推理方法和解模糊方法自己选择。
(2)整个设计过程采用截图方式进行叙述,并有相关的仿真结果。
(30分)例如(课堂例子):饭店用餐后,根据侍者的服务和菜肴好坏,付给小费。
用0~10分表示服务质量,服务的模糊语言有差、好、很好;用0~10分表示菜肴质量,菜肴的模糊语言有差、好;付给小费0~20元,小费的模糊语言有低、中等、高;有三条模糊规则:(1)if 服务差 or 菜肴差 then 小费低(2)if 服务好 then 小费中等(3)if 服务很好 or 菜肴好 then 小费高解:(1)假定某工厂根据机器工作的发热程度(X)和实时气温等级(Y)来控制降温装置的降温程度(Z),以保持机器在正常温度范围就行工作。
用0~10表示发热程度,发热程度的模糊语言有正常(ZO),大(PS),很大(PB);用0~10表示室温等级,温度等级的模糊语言变量有低(NS),正常(ZO),高(PS);降温等级用0~5表示,模糊语言有正常(ZO),低温(PS),超低温(PB)。
模糊规则为:a)if (X=ZO) and (Y=NS) then (Z=ZO);b)if (X=ZO) and (Y=ZO)then (Z=ZO);c)if (X=ZO) and (Y=PS)then (Z=PS);d)if (X=PS) and (Y=NS) then (Z=ZO);e)if (X=PS) and (Y=ZO)then (Z=PS);f)if (X=PS) and (Y=PS)then (Z=PB);g)if (X=PB) and (Y=NS)then (Z=PS);h)if (X=PB) and (Y=ZO)then (Z=PB);i)if (X=PB) and (Y=PS) then (Z=PB)。