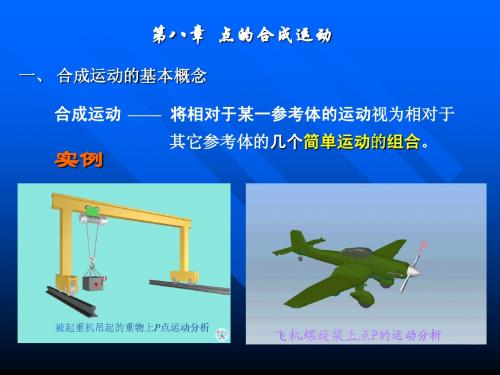
第八章 点的合成运动
理论力学第八章点的合成运动
3
实例三
描述一个长杆在平面内同时作直线运动和回转运动的合成运动,讨论合成运动对 杆心运动特性的影响。
合成运动中的矢量操作
在合成运动中,我们经常需要进行矢量的加法、减法和乘法等操作。这些操作可以帮助我们推导、计算和分析 合成运动的各种特性。
合成运动的应用及展望
应用
合成运动的概念和原理广泛应用于物理学、工程学和运动学等领域,为我们理解和解决复杂 的运动问题提供了有力的工具。
点的合成运动的基本概念
点的合成运动是指多个点以各自不同的速度和方向同时运动,并在同一时间 到达相对位置的运动方式。它是合成运动的基本形式之一。
合成运动的示意图和公式推导
示意图
通过示意图展示合成运动的过程和结果,帮助加深 理解。
公式推导
推导合成运动的公式,使我们能够定量描述和计算 合成运动的各个特性。
质点运动的合成运动
质点的合成运动是指质点在运动过程中,同时具有平移运动和旋转运动的一 种复杂运动形式。在合成运动中,质点的运动轨迹会呈现出特定的形态和规 律。
质点合成运动实例分析
1
实例一
分析一个小球在倾斜平面上同时进行滚动和滑动的合成运动,探讨其运动规律和 性质。
2
实例二
研究一个弹射体在水平飞行过程中受到重力和空气阻力合成运动的影响,揭示合 成运动对物体运动轨迹的影响。
理论力学第八章点的合成 运动
欢迎大家来到本次关于理论力学第八章点的合成运动的精彩演讲。在本次演 讲中,我们将深入探讨合成运动的定义、基本概念、示意图与公式推导,以 及质点运动的合成运动等内容。
合成运动的定义
合成运动是指由多个简单的运动相结合而成的复杂运动。它将两个或多个运 动矢量合成为一个合成矢量,从而形成全新的运动方式。
08-点的合成运动

第八章 点的合成运动8-1 如图所示,光点M 沿y 轴作谐振动,其运动方程为:0=x , )cos(β+=kt a y 如将点M 投影到感光记录纸上,此纸以等速e v 向左运动。
求点M 在记录纸上的轨迹。
解:把动坐标系'''y x O 固连在纸上,M 点的相对运动的运动方程为 t v x e '=,)cos('β+=kt a y 消去t 即可得到M 点在记录纸上的轨迹方程)'cos('eβ+=x v ka y8-3 水流在水轮机工作轮入口处的绝对速度m/s 15a =v ,并与直径成︒=60β角,如图所示,工作轮的半径m 2=R ,转速r/min 30=n 。
为避免水流与工作轮叶片相冲击,叶片应恰当地安装,以使水流对工作轮的相对速度与叶片相切。
求在工作轮外缘处水流对工作轮的相对速度的大小方向。
解:取水轮机工作轮入口处的一滴水为动点M ,动坐标系建立在工作轮上,速度分析图(a ),设θ为r v 与'x 轴的夹角。
M 点的牵连速度为m/s 283.630π2e =⨯==n R v ω 方向与'y 轴平行,由图(a )︒=-︒=+︒sin30)sin(90)sin(60ra e v v v θθ 前一等式得)60sin(cos a e θθ+︒=v v即 ︒︒-=60cos 60sin tan a a e v v v θ把m/s 283.6e =v 及m/s 15a =v 代入解得'4841︒=θ后一等式得m/s 1.10cos 30sin a r =︒=v v θ8-5 杆OA 长l ,由推杆推动而在图面内绕点O 转动,如图所示。
假定推杆的速度为v ,其弯头高为a 。
试求杆端A 的速度的大小(表示为推杆至点O 的速度x 的函数)。
解:取推杆上与AO 杆接触的B 点为动点,动系固连在AO 上,B 点速度分析如图。
设OA 角速度为ωv v =a ,ϕωsin a e v OB v =⋅=,ϕωsin v OB =⋅ 以 22sin a x aOBa +==ϕ代入上式得,22ax va+=ω 最终得 22a ax lavl v +==ω,方向如图8-7 在图a 和b 所示的两种机构中,已知mm 20021==a O O ,rad/s 31=ω。
第八章 点的合成运动

C
ω
A θ O e ve
ε R vr
θ
va
3)求BCD杆的加速度 A点的相对加速度沿水平方向。 A点的牵连加速度亦即杆BCD的加速度,沿铅垂向下。 因aa = ar + ae 故aax + aay = arx + ary + aex + aey D 故aay = ary + aey = ae 即A点的牵连加速度大小为 A点的绝对加速度沿铅垂方 向的投影。 ae= aancosθ+ aatsinθ aBCD= eω2cosθ+ eεsinθ
A x' z O x y z' M O' B y'
ω
动系的选择要确保动点与之有相对运动且相对运动状 态易判断,故动点和动系不能在同一物体上。
3.三种运动 3.三种运动 •相对运动:动点相对于动系的运动。 相对运动: •牵连运动:动系相对于定系的运动,是刚体的运动。 牵连运动: •绝对运动:动点相对于定系的运动。 绝对运动: 4.两种轨迹 4.两种轨迹 •相对轨迹:动点相对于动系的轨迹。 相对轨迹: •绝对轨迹:动点相对于定系的轨迹。 绝对轨迹: 5.牵连点 5.牵连点 在某瞬时,动系上与动点相重合 的点为动点在该瞬时的牵连点 牵连点。 牵连点 牵连点相对于动系静止不动。
则位移: rM = rO'+ r' 动系上与动点重合的点 (牵连点)记为M',它 牵连点) 在定系中的矢径为rM' 。 图示瞬时: rM = rM'
二、点的速度 相对速度
~ ~ d r ′ d ( x′i ′ + y′j ′ + z ′k ′) = vr = dt dt
同济大学 理论力学 孙杰 第八章 点的合成运动 课件
dr r 其中 dt dt
o dr
va vr vo e r o 牵连点M’的速度( 动系 其中: vo e r ve 上与动点M重合的点 )
a e r
v v r dr dr dro o e e M’ e r dt dt dt r v o
ee : x :x : r r r e r e 0 0 0 sin e r r sin sin e sinsin sin
R
a e r
例4
图示刨床的滑道摇杆机构,已知O为匀角速度
(曲杆OA)。 r r , 1 OO131r3r ,OrC C 12 2r3 ,2 r ,3r , 30 OA OAr , ,OO r3 , 3 1, 1 O 13 2r 3 3030 30 OA ,OA OO1 OO, r O C C, O 。 求:当曲杆水平时,杆O1D的角速度、CE的速度。 Be Ba 解: 动点: 滑块A 动系: 杆O1D 1 1 1 Aa Br sin Ae Aasin Ae 0OA sin 0 OA sin0 r0 Aa sin Aa OA sin 30 rr30 00 Ae 0 Ae Ar 2 2 2 Ae11 Ae 1 1O1 D Ae O1D00 A 4 0 1 OD O1D O1 O AA 44 O1
3、传动机构类零件 ——
P30 习题:3、4
动点:两物体的接触点 ( 在接触点不变的物体上 ), 动系:另一物体。
例3
已知:凸轮以匀速度v向左移动。 求: =30 时,顶杆的速度。
第八章 点的合成运动

潍坊学院机电系讲稿专用纸如车轮上的点P的运动,如果以地面作为参考系,点的轨迹是旋轮线,而如果以小车作为参考系,点的轨迹则是一个圆。
相对于地面是直线运动,相对于旋转的工件,是,因此,车刀在工件的表面上切出螺旋线。
在实际问题中,往往不仅要知道物体相对地球的运动,而且有时要知道被观察物体相对于地面运动着的参考系的运动情况。
例如在运动着的飞机、车船上观察飞机、车船潍坊学院机电系讲稿专用纸潍坊学院机电系讲稿专用纸动系上与动点相重合的点相对于定系的速度、加速度称为牵连速度、牵连加速度。
6. 动点和动系的选择基本原则:(1)动点对动系要有相对运动。
(2)动点的相对运动轨迹要明确、容易确定。
具体选择方法:(1)选择持续接触点为动点。
(2)对没有持续接触点的问题,一般不选择接触点为动点。
根据选择原则具体问题具体分析。
实例见PPT。
潍坊学院机电系讲稿专用纸潍坊学院机电系讲稿专用纸潍坊学院机电系讲稿专用纸内的绝对位移绕固定轴O limlim11M M MM '+='M M MMM M '+='11潍坊学院机电系讲稿专用纸潍坊学院机电系讲稿专用纸潍坊学院机电系讲稿专用纸在定系和动系中的矢径分别用r 和r ′表示。
k z j y i x r r ''+''+''+='r潍坊学院机电系讲稿专用纸和为未知量,暂设潍坊学院机电系讲稿专用纸当牵连运动是定轴转动时,动点的绝对加速度并不等于牵连加速度与相对加速之矢量和。
牵连运动是定轴转动时点的加速度合成定理和角加速度α 绕定系Oxyz 的轴z 转动;动系)分析动系的单位矢量k j i''',,对时间的一阶导数以角速度e ω绕定轴z 转动,则角速度矢e ω沿潍坊学院机电系讲稿专用纸潍坊学院机电系讲稿专用纸0=r v ③ r e v//ω r e v⊥, 此时 e k a =ω2是由于牵连运动和相对运动的相互影响而产生的潍坊学院机电系讲稿专用纸潍坊学院机电系讲稿专用纸潍坊学院机电系讲稿专用纸。
第8章 点的合成运动

vr
Dj
Dt
evr
,
方向 vr 。
这一项表明由于牵连转动而引起 相对速度方向改变的加速度。
26
由于第二项和第四项所表示的加速度分量的大小,方向都
相同,可以合并为一项,用 aC 表示,称为科里奥利加速度,简
称科氏加速度。是由牵连运动为转动时,牵连运动与相对运动的 相互影响而产生的。
aC 2evr , 方向 vr , 指向顺ωe 转动的一边
14
例 题 8-3
解:
1. 选择动点,动系与定系。
动点-滑块 A 。
y'
动系-O1x'y',固连于摇杆 O1B。
2. 运动分析。 绝对运动-以O为圆心的圆周运动。
x'
相对运动-沿O1B的直线运动。
牵连运动-摇杆绕O1轴的摆动。
15
例 题 8-3
3. 速度分析。
绝对速度va:va=OA ·ω =r ω ,方 向垂直于OA,沿铅垂 方向向上。
x
2. 运动分析。
绝对运动- 平面曲线运动。
相对运动-沿动直管的直线运动。
牵连运动-直管绕O作定轴转动。
29
例 题 8-4
va
y
y'
ve=vaφ
x' vr=var
M
Oj
x
3. 速度分析。
绝对速度va: 大小和方向未知。
牵连速度ve:大小
ve
r
dj
dt
,
方向垂直于向直管向左上。
相对速度vr: 大小
2
§8-1 相对运动•牵连运动•绝对运动
运动是绝对的,但运动的描述则是相对的。同一物体的运动 在不同的参考系中是不一样的。例如车轮上的点P的运动, 如果以地面作为参考系,点的轨迹是旋轮线,而如果以小车 作为参考系,点的轨迹则是一个圆。
理论力学第八章点的合成运动
运动学/点的合成运动
运动学/点的合成运动
运动学/点的合成运动
运动学/点的合成运动
▼动点和动系的选择
基本原则: 1.动点对动系要有相对运动。 2.动点的相对运动轨迹要明确、容易确定。 具体选择方法: 1.选择持续接触点为动点。
(1)绝对运动方程: x x(t), y y(t)
运动学/点的合成运动
第八章
点的合成运动
§8-1 点的合成运动的概念
§8-2 点的速度合成定理
§8-3 牵连运动为平移时
点的加速度合成定理
§8-4
牵连运动为转动时
点的加速度合成定理
本章中点的速度合成是重点,点的加速度合成是难点。
运动学/点的合成运动
§8-1 点的合成运动的概念
一、坐标系 ●定坐标系:建立在固定参
考物上的坐标系,简称定系。 一般将定系固结在地面上。
建立在相对于定系运动着的物体上的坐
标系,简称动系。图示原点在轮心与车厢固连的坐标系
o`x`y` 汽车车厢相对于
运动,如果将 坐标系固
结于车厢上,则形成了相对于定系运动的坐标系
。
运动学/点的合成运动
二、动点 ●动点是指相对于定系和动系均 有运动的点,本章就是研究动点 相对于定系和动系的运动。
牵连运动: 直线平移
运动学/点的合成运动
▼凸轮机构运动分析
动点:凸轮圆心点O 动系:摇杆 静系:地面 绝对运动:直线 相对运动:直线
牵连运动:定轴转动
●注意的问题:
▼三种运动的分析必须明确什么物体相对什么参考体的
运动。 ▼相对、绝对运动指点的运动,可以是直线或曲线运动 ;牵连运动是指参考体的运动,是刚体的运动,可以是 平移或定轴转动以及刚体的其他运动形式。
理论力学第八章 点的合成运动
I) 动系作平动时,动系上各点速度都相等。
II) 动系作转动时,ve必须是该瞬时动系上与 动点相重合点的速度。
第二节 点的速度合成定理
点的速度合成定理是瞬时矢量式,共包括大小‚方向 六个元素, 已知任意四个元素,就能求出其他两个。 二.应用举例 [例8-1] 桥式吊车 已知: 小车水平运行,速度为v平, 物块A相对小车垂直上升
第一节 点的合成运动的概念
三.三种运动及三种速度与三种加速度。 1.绝对运动:动点对静系的运动。 点的运动 2.相对运动:动点对动系的运动。 例如:人在行驶的汽车里走动。 3.牵连运动:动系相对于静系的运动 刚体的运动 例如:行驶的汽车相对于地面的运动。
绝对运动中,动点的速度与加速度称为绝对速度 va 与绝对加速度
第八章 点的合成运动
主要研究内容
§8–1 点的合成运动的概念
§8–2 点的速度合成定理
§8–3点的速度合成定理合成定理
第一节 点的合成运动的概念
一.坐标系: 1.静坐标系:把固结于地面上的坐标系称为静坐标系, 简称静系。 2.动坐标系:把固结于相对于地面运动物体上的坐标 系,称为动坐标系,简称动系。例如在行驶的汽车。 二.动点:所研究的点(运动着的点)。
v A v a v e v r v平 v
2
2
2
2
t g1
v v平
第二节 点的速度合成定理
[例8-2] 曲柄摆杆机构 已知:OA= r , , OO1=l 求:摆杆O1B角速度1 图示瞬时OAOO1
解:取OA杆上A点为动点,摆杆O1B为动系, 基座为静系。 绝对速度va = r 方向 OA 相对速度vr = ? 方向//O1B 牵连速度ve = ? 方向O1B 由速度合成定理 va= vr+ ve 作出速度平行四边形 如图示。 r r 2 sin ,ve va sin r 2 l 2 r 2 l 2 ve 1 r 2 r 2 又ve O1 A1 ,1 2 l 2 ( 2 2 O1 A r 2 2 r l r l
第8章 点的合成运动
由几何关系可求得M点的牵连速度
则摆杆的角速度为
例题 在图a 和图b 所示的两 种机构中,已知O1O2 = a =200 mm, ω1 = 3 rad/s 。求图示位置时杆O2A 的角 速度。
例8-1 如图所示桥式吊车,已知起吊重物垂直上升的速 度v1=0.4m/s,小车向右运行的速度v2= 2m/s,试求重 物的速度vA。 解 (1) 首先确定动点并选 取适当的坐标系。 在此种情况下,以重物为 动点,选动坐标O’x’y’固连于 小车上,静坐标系固连于地 面上。 (2) 分析三种运动。 小车带动重物的水平向右运动为动点的牵连运动,即 ve=v2;动点的相对运动是垂直上升的直线运动,其速 度为vr=v1;动点对于地面的运动是绝对运动。所以本 题是已知牵连速度及相对速度,求绝对速度。
由加速度定义.动点的绝对加速度 a表示为 绝对加速度以a 绝对加速度
将绝对运动分解为牵连运动和相对运动两部分来研 究。在讨论牵连加速度时,设想动点在曲线上没有相 对运动,则经过△t时间,动点由M位置到达M1位置,牵 连速度由ve变为ve1,故牵连加速度以ae。表示为
由于牵连运动是平动,在同一瞬时动坐标系上各点 的速度都相同,即ve’=ve1,则aa表达式等号右端的第 一项可写为
由以上分析可知,如果已知动点相对于动坐标系 的相对运动以及动坐标系的牵连运动.那么就可以将 动点的绝对运动看成是上述两种运动的结果。反之, 亦可把动点的绝对运动分解为上述两种分运动。因此, 这种类型的运动称为点的合成运动。
研究点的合成运动的主要问题,就是如何由已知动 点的相对运动和牵连运动求出绝对运动;或者,如何 将已知的绝对运动分解为相对运动与牵连运动。即研 究这三种运动的关系。
第8章 点的合成运动
§8.2 点的速度合成定理
例 题 8-3
运 动 演 示
§8.2 点的速度合成定理
例 题 8-3
相对运动轨迹
§8.2 点的速度合成定理
例 题 8-3
y'
解:
1. 选择动点,动系与定系。 动点-滑块 A 。 动系-O1x'y',固连于摇杆 O1B。 定系-固连于机座。 2. 运动分析。
va aa vr ar
牵连运动没有轨迹,因为牵连运动是刚体的运动,不是一 个点的运动. 和牵连运动相对应的为: 牵连速度 牵连加速度
ve ae
§8.1 点的合成运动的基本概念
牵连速度和牵连加速度指的是某瞬时在动参考系上与动点重 合的那点(牵连点)相对于静参考系的速度和加速度.
y
牵连运动 相对运动
va ve v r
§8.2 点的速度合成定理
例 题 8-3
va ve v r
v e v a sin
因为 va r , sin 所以
r l r
2 2
,
ve
r 2 l2 r2
r 2 l2 r2
r 2 1 2 2 l r
设摇杆在此瞬时的角速度为ω1,则
消去时间 t,得刀尖相对轨迹方程
b 2 b2 ( x ) ( y ) 2 4
2
§8.2 点的速度合成定理
§8.2 点的速度合成定理
1.定理 在任一瞬时,动点的绝对速度等于牵连速度和相对速度的矢 量和。这称为点的速度合成定理。即动点的绝对速度可由牵
连速度与相对速度所构成的平行四边形的对角线来确定,这
A M v2 B v1
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
动点
v
动系
牵连运动
定系
动点的绝对运动和相对运动都是指动点的运动, 而牵连运动是指坐标系的运动,实际上是刚体的运 动。
三、合 成 运 动 的 概 念
8.1
相 对 运 动 牵 连 运 动 绝 对 运 动
如果没有牵连运动,则 u 动点的相对运动就是它的绝 对运动;反之,如果没有相 对运动,则动点随同动坐标 v 系所作的运动(牵连运动) 就是它的绝对运动。由此可 见,动点的绝对运动既决定于动点的相对运动,也 决定于动坐标系的运动即牵连运动,它是这两种运 动的合成,因此这种类型的运动就称为点的合成运 动。
点 的 速 度 合 成 定 理
注意:(1)动点及动坐标系的选取;(2)对于
三种运动及三种速度的分析;(3)根据速度合 成定理并结合个速度的已知条件先作出速度矢量 图;然后利用三角关系或矢量投影定理求解未知 量。
例2 如图半径为R的半圆形凸轮以匀速 v 0 沿水平
8.2 轨道运动,带动顶杆AB沿铅垂滑槽滑动,求在图示 B 点 位置时,杆AB的速度。
eห้องสมุดไป่ตู้a
0 ve vr cos 30 因为 ve OA 2e 于是可解得 2 3 4 3 va e vr e 3 3
va vr sin 30
8.2
B 点 va v 的 Ce R v r 速 o 度 合 成 解:以凸轮圆心C为动点,定系取在地面上, 定 动系取在顶杆AB上。 v a ve v r ve va cos 理 2 方向 e cos 45 e 2 大小 e ? ?
r1
2
1
1
e2
r2
2
C
比较(1)、(2)式,可得: 8.2
ve1 vr1 ve 2 vr 2
v1
点 的 速 度 合 成 定 理
A
建立如图的投影轴,将上 式投影到投影轴上,得:
y
o x
i
y
x
vr
ar
~ dr
~ dvr dt
dx dy dz i j k dt dt dt dt
~ d r
2
dt
2
d 2 y d 2 z d x i j k 2 2 2 dt dt dt
第八章 点的合成运动
相对运动 牵连运动 绝对运动
点的速度合成定理
牵连运动是平移时点的加速度合成定理
牵连运动是定轴转动时点的加速度合成定
理
一、动点、定坐标系、动坐标系
8.1
前面研究了动点对于一个参考坐标系的运动。
u
M
相 对 运 动 牵 连 运 动 绝 对 运 动
v
在不同的参考坐标系中对同一个点的运动的描 述得到的结果是不一样的。
dr
五、相对运动 的速度与加速度
8.1
动点在动系的运动中的轨
迹、速度和加速度称为相对轨 迹、相对速度和相对加速度。 用 v r和 a r 分别表示相对速度和 相对加速度。
z
z
相 对 运 动 牵 连 运 动 绝 对 运 动
M
k i
k
ro
j
r
r
o
j
例5 图示平底顶杆凸轮机构, 顶杆AB可沿导轨上下平动,偏心 凸轮以等角速度 绕O轴转动,O 轴位于顶杆的轴线上,工作时顶 杆的平底始终接触凸轮表面,设 凸轮半径为R,偏心距OC=e , OC 与水平线的夹角为 ,试求 45 当 时,顶杆AB的速度。
A
8.2
点 的 速 度 合 成 定 理
例6 如图车A沿半径为150m 的圆弧道路以匀速v A 45 km h 行驶, v B 60 km h 车B沿直线道路以匀速 vA vB O 行驶 ,两车相距30m,求:(1) A B R A车相对B车的速度;(2)B车相 对A车的速度。 解:(1)以车A为动点,定系取在地面上, 动系取在车B上。动点的速度合成矢量图如图。 由图可得:
的 速 度 合 成 定 理
解:以杆端A为动点,定系 取在地面上,动系取在凸轮上。
v0
vr
va A
O
ve
v a ve v r
方向
大小 ?
v0
?
va ve ctg v0 ctg
v AB va v0 ctg
8.2
点 的 速 度 合 成 定 理
轨迹、速度和加速度称为绝 对轨迹、绝对速度 和绝对 加速度。用 v a 和 a a分别表示 绝对速度和绝对加速度。
x
相 对 运 动 牵 连 运 动 绝 对 运 动
z
z
M
k i
k
ro
j
r
r
o
j
y
o
i
y
x
va
dx dy dz i j k dt dt dt dt 2 2 d 2 y d 2z dv a d r d x aa 2 2 i 2 j 2 k dt dt dt dt dt
为了研究方便,把所研究的点称为动点, 把固连于地球上的参考坐标系称为定坐标系 (静坐标系);而把另一个相对于定坐标系运 动的坐标系称为动坐标系(动系) 。
二、绝对运动 相对运动 牵连运动的概念
8.1
相 对 运 动 牵 连 运 动 绝 对 运 动
为了区分动点对于不同坐标系的运动,规定: 动点相对于定坐标系的运动称为绝对运动。 动点相对于动坐标系的运动称为相对运动。 动坐标系相对于定坐标系的运动称为牵连运动。
2
六、 牵连运动 的速度与加速度
8.1
在某一瞬时,动坐标系上和动点相重合的点(
相 瞬时牵连点)相对静坐标系的速度和加速度称为该 对 运 瞬时的牵连速度和牵连加速度。用 v e 和 a e分别表示 动 牵连速度和牵连加速度。 牵 t t B 连 t u 运 M 动 A M 绝 对 运 动 注意:牵连速度和牵加速度完全由动坐 标系的运动决定;
e a
0 ve vr cos 30 因为 ve OA 2e 于是可解得 2 3 4 3 va e vr e 3 3
va vr sin 30
例4 直角折杆OBC绕O轴匀速转动,并带动套 8.2 在其上的小环M沿固定直杆OA滑动,如图。已知: 点 OB=10cm,折杆的角速度 0.5 rad s 。 求当 60 ,小环M的速度。 的 vr C M O A 解:以小环M为动点,定 速 60 v v 度 系取在地面上,动系取在折 B 杆OBC上。
B 例3 偏心凸轮以匀角速度 绕O轴转 动,使顶杆AB沿铅直槽运动,轴O在滑 v v r v A 槽的轴线上,偏心距OC=e,凸轮半 r 径 r 3e ,试求 OCA 90 的图示位 C O 置时,顶杆AB的速度。 30 由几何关系可得 解:以杆端A为动点,定系取在地面上,动系 取在轮上。动点的速度合成矢量图如图。 建立如图的投影坐标轴,由 va ve vr 将矢量投 影到投影轴上,得
2 42
vA
45 10 3
ve vA vB A 2B vr 2
8.2
点 的 速 度 A B va ve1 vr1 (1) v 合 M v C 成 以小环M为动点,静系取在地面上,动系取在 定 v CD杆上,动点的速度合成矢量图如图。 va 理 D v v 于是有: v v A B va ve 2 ve1 (2) M v
点 0.083 rad / s y R 3600 150 O x 的 速 ve 180 0.083 15 m / s 54 km / s R 度 2 v r 2 v B ve2 80 .72 k m / h 合 ve 54 成 sin 2 0.669 v r 2 80 .72 定 理
vr
M
va ve
M
B
M1
t
A
t t
A
即:动点在某一瞬时的绝对速度等于它在该
瞬时的牵连速度与相对速度的矢量和。这就
是点的速度合成定理。
注意:(1)速度关系式是平面矢量方程; (2)绝对速度是对角线; (3)牵连速度为任何形式的运动时, 速度关系式都成立。
8.2
在应用速度合成定理来解决具体问题时,应
10 0 .5
0.5 10 cm s
vr 20 cm s
va 10 3 cm s
v M v a 10 3 cm s
8.2
点 的 速 度 合 成 定 理
B 例3 偏心凸轮以匀角速度 绕O轴转 动,使顶杆AB沿铅直槽运动,轴O在滑 v v r v A 槽的轴线上,偏心距OC=e,凸轮半 r 径 r 3e ,试求 OCA 90 的图示位 C O 置时,顶杆AB的速度。 30 由几何关系可得 解:以杆端A为动点,定系取在地面上,动系 取在轮上。动点的速度合成矢量图如图。 建立如图的投影坐标轴,由 va ve vr 将矢量投 影到投影轴上,得
vr1 v v
2 A 2 e
v v 75 k m / h
2 A 2 B
O
ve
sin 1
vA vr1
45 75
0 .6
R
v A v y r1 x 1 A vB B
1 36 .9
(2)以车B为动点,定系取在地面上,动系取 8.2 在车A上。动点的速度合成矢量图如图。
M 如图,由图中矢量关系可得: 2