第四章自动驾驶仪及控制规律备课讲稿
[工学]第四章 典型汽车试验设备及设施
![[工学]第四章 典型汽车试验设备及设施](https://img.taocdn.com/s3/m/605488f3ad51f01dc281f158.png)
底盘测功机的构成
1) 转鼓
分为双鼓和单鼓。双鼓主要用于轿车和小型汽车性能试验以及汽车维 护前后的检查试验。转鼓直径一般为220—500mm。由于鼓径较小,试验 台体积也较小,所以造价较低。单鼓鼓径一般为l 500~2 500mm。单鼓相 对于双鼓来说,试验车的轮胎变形较小,接近路面,不仅适用于性能试 验,还可用于耐久性试验。
. 2 . 2 消声室、混响室
汽车是一个噪声源,世界各国环境保护的法规中都对汽车这个噪声源加以限 制。作为汽车制造厂,需对本厂产品进行噪声测试、分析研究。为了在一个可 以控制的环境中进行试验,需具备不受外界干扰的声学环境,这就是建造消声 室和混响室的目的。 适用试验类型 1)消声室 ①发动机声功率级测量、声场分布、1m声压级测量等 ②排气系统噪声研究,排气噪声测量; ③冷却系噪声研究: ④传动系噪声研究; ⑤起动机、发动机等电气噪声研究; ⑥气、电喇叭频谱分析,可靠性试验; ⑦声学仪器的计量等。 2)混响室 ①机器声功率级的测量; ②汽车车身隔声性能研究; ③吸声材料吸声系数的测量等。 3)消声室、混响室联合使用 材料隔声性能研究。
4
. 3 . 2 驾驶模拟器
汽车驾驶模拟器是利用计算机,从人一车一交通环境 的闭环系统整体性能出发,对汽车主动安全性能等进 行仿真研究和开发的大型试验装备。20世纪80年代以 来,德国、瑞典、日本、美国的各大汽车厂家分别建 立了开发型驾驶模拟器。1985年, Daimler—Benz汽车公 司首先建立了世界上规模最大的模拟器,成功地用于 系列化高速轿车的产品开发中。1989年,德国大众汽 车公司改建原有的模拟器,更新了计算机的运算能力 和视景生成系统。进入加世纪90年代,日本马自达、 美国福特、日本自动车研究所(JARI)相继建成带有不同 需要的驾驶模拟器。1996年,在我国吉林工业大学建 成ADSI。驾驶模拟器,创立了汽车动态模拟国家重点 实验室。
M11下册__自动飞行控制
自动飞行控制M11下第4章4.1自动驾驶仪的工作原理 (3)1. ◆自动驾驶仪的基本原理★P634 (3)2. ◆比例式,积分式自动驾驶仪公式(控制规律)中各项的作用,能产生什么影响?(以俯仰控制为例)★P639-641 (4)3. ◆解释三轴 AP,如果飞机当前在15000 英尺,当设定到新高度20000英尺后,比例式AP 如何进行控制?★★ (4)4. ◆比例式自动驾驶仪的工作原理,给出的是一个图(P639 页),让按照这个图说自动驾驶仪是如何工作的★★ (5)5. ◆自动驾驶仪舵回路原理?★P636 (6)6. ◆ CWS和CMD方式有什么区别,CMD方式的俯仰方式有哪几种?CMD方式的倾斜通道的工作方式?P644 ★ (6)7. ◆垂直导航(V NAV)接通时,自动驾驶如何完成纵向指令计算?P683 (6)8. ◆ MCP板上如何控制飞机俯仰方式,A/P之间关系(高度,高度保持),A/P方式?P664 (7)9. ◆ A/P有什么通道?每个通道有什么参数?P644 ★ (7)10. ◆ A/P衔接后,可以实现的主要功能有哪些? (7)11. ◆如何断开自动驾驶?P665 (7)4.2安定面配平、马赫配平 (8)12. ◆自动配平的原理 P647 ★ (8)13. ◆马赫配平的原理,配平时动什么舵面,当马赫数降低时舵面怎么动?★ (8)14. ◆自动配平作用,失控配平亮什么灯,怎么处理?P652 ★ (8)15. ◆非计划配平灯亮的原因P652 ★ (8)16. ◆马赫配平,安定面配平关系? (9)17. ◆马赫配平的题给了书上 652 页的图,要求解释?p652★★ (9)18. ◆速度配平的原理p650★★ (9)19. ◆死配平,失控配平、反向配平p652★★ (10)4.3偏航阻尼系统 (10)20. ◆荷兰滚产生的原因?P653 ★ (10)21. ◆偏航阻尼系统的原理及作用 P654★ (10)22. ◆偏航阻尼耦合器拆装注意事项?★□ (11)23. ◆偏航阻尼系统的组成及各部件的作用P655 (11)24. ◆偏航阻尼器INOP灯亮的原因P656 (11)25. ◆偏航阻尼的功用,正常转弯有没有影响,为什么?★★ (11)4.4飞行控制计算机(FCC)及系统 (12)26. ◆ FCC主要功能和组成部分P658 (12)27. ◆飞行控制计算机的基本工作原理P660 (12)28. ◆飞行控制计算机的软件组成P662 (12)29. ◆当按下CMD按钮时显示什么?如何断开自动驾驶? P664★ (12)30. ◆ FCC在维护,拆装以及搬运过程中的注意事项,为什么? P659只有一句□ 1331. ◆ FCC都计算哪些指令,这些指令通过MCP板怎样实现俯仰通道方式功能的?★ (13)32. ◆ FCC中值选择电路的功能?在A/P衔接工作情况下选择那部FCC作为主FCC?P670 (13)33. ◆自动着陆系统使用多余度控制,为什么?有一个通道失效以后,怎么工作?P669★ (13)34. ◆模拟式飞行控制系统的主要不足是什么?□ (14)35. ◆数字式飞行控制系统具有哪些主要优点?□ (14)4.5飞行指引仪 (14)36. ◆飞行指引仪的原理、功用。
(整理)自动飞行控制系统电子讲稿第一部分
学习情景1 课程导论1.飞行控制系统发展概述自动飞行控制系统已有100多年的研制历史,早在有人驾驶飞机出现之前,自动飞行装置即已出现。
1.1方向稳定器1873年,法国雷纳德(C.C.Renard)无人多翼滑翔机的方向稳定器。
1.2 电动陀螺稳定装置-姿态稳定1914年,美国的爱莫尔·斯派雷(Eimer Sperry)研制成功第一台可以保持飞机稳定平飞的电动陀螺稳定装置,该装置利用陀螺的稳定性和进动性,建立一个测量基准,用来测量飞机的姿态,它和飞机的控制装置连在一起,一旦飞机偏离指定的状态,这个机构就通过飞机的控制装置操纵飞机的舵面偏转使飞机恢复到原来的状态。
1.3 自动驾驶仪20世纪30年代出现了可以控制和保持飞机高度、速度和航迹的自动驾驶仪。
第二次世界大战促使自动驾驶仪等设备得到进一步发展,由过去气动-液压到全电动,由三个陀螺分别控制三个通道改用一个或两个陀螺来操纵飞机,并可作机动、爬高及自动保持高度等。
➢二次大战期间,美国和原苏联相继研制出功能较完善的电气式自动驾驶仪C-1和其仿制品A∏-5;➢德国在二战后期研制成功飞航式导弹V-1和弹道式导弹V-2,更进一步促进了飞行自动控制装置的研制和发展。
20世纪50年代后,和导航系统、仪表着陆系统相联,自动驾驶装置实现了长距离自动飞行和自动着陆。
1.4 自动飞行控制系统1947年成功突破音障后,飞机的飞行包线(飞行速度和高度的变化范围)扩大,越来越复杂的飞行任务对飞机性能的要求也越来越高,仅靠气动布局和发动机设计所获得的飞机性能已经很难满足复杂飞行任务的要求。
因此,借助于自动控制技术来改善飞机稳定性的飞行自动控制装置(如增稳系统)相继问世,在此基础上,自动驾驶仪的功能得到进一步的扩展,发展成为自动飞行控制系统(AFCS)。
20世纪60年代,产生了随控布局飞行器(congtrol configured vehicle--CCV)的设计思想。
20世纪60年代前的以模拟电路或模拟计算机为主要计算装置的飞行控制系统,逐渐发展成为现在已普遍应用的数字式飞行控制系统,这也为新技术应用和更复杂更完善系统的综合提供了实现的可能性。
飞机均衡式自动驾驶仪控制规律设计及仿真

飞机均衡式自动驾驶仪控制规律设计及仿真曲东才;林志刚;卢建华【摘要】The aero proportional control law of the automatic pilot would bring control stability error under interference mo-ment or ramp signal, airplane then can't make airplane accurate fly along scheduled flight path. Firstly, basic work princi-ple foundation of the balanced-automatic pilot was briefly analyzed. Secondly, structure diagram of balanced-automatic automatic pilot was established, and it’s control law was designed. Finally, a great deal of simulation research was done. Simulation results manifested that the designed balanced-automatic pilot control law was good and valid, with comparison proportional control law of automatic pilot, and the steady state capabilities of the control system with balanced-automatic pilot were gotten valid improvement.%飞机在干扰力矩或斜坡信号作用下,其比例式自动驾驶仪控制规律会产生控制静差,难以控制飞机按预定航迹准确飞行。
均衡式自动驾驶仪控制规律参数设计及仿真研究
L w ,ti oi ei te o t l eua o aa ee o h a n e — uoi t n d sm s ua o a ) hs pc s n h cnr rglt n p rm tr f te b l cd atpl ad o o e i lt n t d g o i s a o m i
2De at n f Auo t n C nmlE gn eig,NAEI . p rme to tmai o t n ie r o n ,Ya ti2 4 0 ,C ia na 6 0 1 hn )
Ab t a t T i o i h o e a o sr c : h s p c c o s c mmo l u e t o f t e o t l y t m ’ S e in t n y s d meh d o h c n r s se o d sg ,w ih s r m i sd o h c i o f nie t
r s a c by ee rh us o a lb i a in o t r . e f M ta smulto s fwa e
Ke r s b l n e — u o i t o t l r g l t n t e p r me e s d sg n i l t n y wo d : a a c d a tp l ; n r e u ai ; h a a tr e in a d smu ai oc o o o
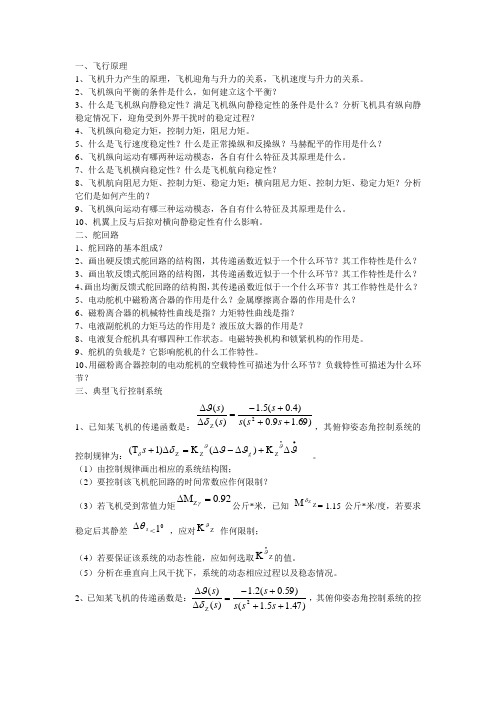
/T + ) ( s1的正反馈,其中T为几秒直至十几秒。 e
如图 1 示。 所
高 。在设 计 自动 驾驶 仪控 制规 律 时 ,不但 要 使驾驶
仪 具 有 良好 的动 态 性 能 ,而 且 要 有 精 确 的稳 态 精 度 。硬 反 馈 式 自动 驾 驶 仪 虽 然 具 有 良好 的 动 态 性 能 ,但 它 的稳 态 精 度 已经 满 足 不 了 现 代 飞 机 的 要 求 。 为此 ,有必 要设 计 出一种 稳态 精度 更 高 的 自动 驾 驶仪 ,来 满 足现代 飞 机 的需 要 。
无人驾驶汽车操作与维护使用说明书

无人驾驶汽车操作与维护使用说明书第一章:介绍欢迎使用无人驾驶汽车,本操作与维护使用说明书将为您提供详细的指导。
请仔细阅读本手册,并按照说明操作,以确保安全和有效的使用体验。
第二章:操作指南2.1 准备在使用无人驾驶汽车之前,请确保您已经完成以下准备工作:- 确认车辆电量充足,将无人驾驶汽车连接到充电器。
- 检查车辆外部是否有明显损坏或污染。
- 确保安全带固定良好。
2.2 启动与关闭- 按下启动按钮,无人驾驶汽车将开始启动程序。
- 在使用结束后,按下关闭按钮,车辆将进入停机状态。
2.3 目的地设定- 使用车载导航系统或手机App,设定您的目的地。
- 确认导航系统已正确连接网络,并获取最新地图和交通信息。
2.4 行驶与停车- 在目的地设定完成后,无人驾驶汽车将根据导航系统和传感器的指令自动行驶。
- 注意观察周围环境,确保道路安全,避免与其他车辆或行人发生碰撞。
- 当到达目的地时,无人驾驶汽车将自动停车并等待下一步指令。
第三章:维护与保养3.1 故障排除- 当无人驾驶汽车出现异常情况时,及时停车,并联系售后服务中心进行故障排查与处理。
- 不要自行拆解或修理无人驾驶汽车,以免造成进一步损坏或安全隐患。
3.2 车辆清洁- 定期清洁车辆外观,可使用柔软的清洁材料擦拭,避免使用粗糙的物品刮擦车漆。
- 同时,注意清洁车辆底盘和传感器,确保其工作正常。
3.3 充电管理- 在无人驾驶汽车电量过低时,及时将其连接到指定充电器进行充电。
- 避免长时间超负荷充电以及在高温或潮湿环境下进行充电。
3.4 定期检查与维护- 根据使用手册中的保养周期表,按时进行相关项目的检查和维护,以确保车辆各部件的正常工作。
- 检查轮胎胎压、制动系统、灯光、雨刷器等关键部件,确保其正常工作。
第四章:安全注意事项4.1 驾驶员责任- 尽管是无人驾驶汽车,驾驶员仍有责任注意观察道路并随时准备接管控制权。
- 在驾驶过程中,不要进行其他会分散注意力的活动,如打电话或使用手机。
飞控复习提纲讲解
一、飞行原理1、飞机升力产生的原理,飞机迎角与升力的关系,飞机速度与升力的关系。
2、飞机纵向平衡的条件是什么,如何建立这个平衡?3、什么是飞机纵向静稳定性?满足飞机纵向静稳定性的条件是什么?分析飞机具有纵向静稳定情况下,迎角受到外界干扰时的稳定过程?4、飞机纵向稳定力矩,控制力矩,阻尼力矩。
5、什么是飞行速度稳定性?什么是正常操纵和反操纵?马赫配平的作用是什么?6、飞机纵向运动有哪两种运动模态,各自有什么特征及其原理是什么。
7、什么是飞机横向稳定性?什么是飞机航向稳定性?8、飞机航向阻尼力矩、控制力矩、稳定力矩;横向阻尼力矩、控制力矩、稳定力矩?分析它们是如何产生的?9、飞机纵向运动有哪三种运动模态,各自有什么特征及其原理是什么。
10、机翼上反与后掠对横向静稳定性有什么影响。
二、舵回路1、舵回路的基本组成?2、画出硬反馈式舵回路的结构图,其传递函数近似于一个什么环节?其工作特性是什么?3、画出软反馈式舵回路的结构图,其传递函数近似于一个什么环节?其工作特性是什么?4、画出均衡反馈式舵回路的结构图,其传递函数近似于一个什么环节?其工作特性是什么?5、电动舵机中磁粉离合器的作用是什么?金属摩擦离合器的作用是什么?6、磁粉离合器的机械特性曲线是指?力矩特性曲线是指?7、电液副舵机的力矩马达的作用是?液压放大器的作用是?8、电液复合舵机具有哪四种工作状态。
电磁转换机构和锁紧机构的作用是。
9、舵机的负载是?它影响舵机的什么工作特性。
10、用磁粉离合器控制的电动舵机的空载特性可描述为什么环节?负载特性可描述为什么环节?三、典型飞行控制系统1、已知某飞机的传递函数是:)69.19.0()4.0(5.1)()(2+++-=∆∆Z s s s s s s δϑ,其俯仰姿态角控制系统的控制规律为:•Z Z Z ∆K +∆-∆K =∆+T •ϑϑϑδϑϑδ)()1(g s 。
(1)由控制规律画出相应的系统结构图;(2)要控制该飞机舵回路的时间常数应作何限制? (3)若飞机受到常值力矩92.0=∆M Z γ公斤*米,已知 Z Z M δ=-1.15公斤*米/度,若要求稳定后其静差 s θ∆<01 ,应对Z K ϑ 作何限制;(4)若要保证该系统的动态性能,应如何选取Z •K ϑ的值。
无人驾驶_演讲模板

AI在无人驾驶中的应用
2. 路径规划与 决策
基于感知与识别系统 提供的信息,AI算法 能够根据预设的路径 规划算法和交通规则 ,实时计算出最佳行 驶路径,并做出相应 的驾驶决策,如加速 、减速、变道、停车 等
AI在无人驾驶中的应用
AI在无人驾驶中的应用
3. 车辆控制与 调整
AI算法还可以控制车 辆的油门、刹车、方 向盘等设备,使车辆 能够根据道路状况和 驾驶需求进行实时调 整,确保行驶的稳定 性和安全性
发展前景
3. 创新交通管 理方式
AI技术可以帮助交通 管理部门实时监测道 路状况、预测交通拥 堵、优化信号灯配时 等,从而提升交通管 理的效率和响应速度
发展前景
4. 推动汽车产 业升级转型
无人驾驶汽车的推广 将促使汽车产业向高 科技、高附加值方向 转型,催生出一系列 新的商业模式和产业 链条
发展前景
-
Thanks 谢谢观看
xxx
无人驾驶
第9小组
-
1
引言
引言
随着科技的飞速发展,人工智能(AI)已经渗透到我们
1
日常生活的方方面面
无人驾驶汽车,作为AI技术的一个重要应用领域,正
2
逐渐从科幻电影走入现实生活
3
本文将探讨AI在无人驾驶汽车中的应用及其发展前景
2
AI在无人驾驶中的应 用
1. 感知与识别
无人驾驶汽车需要能 够感知和识别周围环 境以做出准确的驾驶 决策。AI技术可以通 过深度学习等方法, 帮助汽车感知周围物 体的位置、速度和形 状,进而识别路况、 交通信号、行人和其 他车辆等关键信息源自4结论结论
A
人工智能在无人驾驶汽车中的应用 和发展前景令人充满期待
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• L2
L3/L2
UZON
U ••
微分器
放大器
K1
舵机
K2 T S 1
1/S
d e
操纵杆系
e
Kf
测速电机
直升机
G(S)
• • •
U Z O ( U N U • U • • U g ) L 1 ( g ) L 2 L 3
•
•
•
••
eL(g)L•L••
•
eL ( g)d tL • L ••
K3 B1S
STS1
直升机
Kf
K1
U Z0U 舵回路综合输入信号 操纵杆系假定为1时,通道传递函数为:
e e(s) K1K2/S(TS1)
UZ0U U(S) 1K1K2Kf /S(TS1) 1
TS2
K1K2 SK1K2Kf
T
Kf S2 1
S1
K1K2Kf
K1K2Kf
e
1 Kf
UZ0U
只要满足条件:
(1 K1K 2 K f )
T S 1 K1K 2 K f
T S 1
•
e
1 Kf
UZO N
e
1
1 Kf S
UZO
N
K1K2K
f
只要满足条件: K1K2Kf 1 K1K2Kf T 速度反馈,舵机的时间常数减少了1K1K2Kf 倍
➢综合信号由测量和设置得到
U ZO N L 1( g)
•
eL(g)
L L1 / K f 传 L• L2 / K f 动
L•• L3 / K f 比
一般形式积分式驾驶仪
给定装置 U g 测量元件 U 1
测量元件 U n
U ZON
放大器 舵机 d e 操纵杆系 e 速度反馈
直升机
•K 1f (u1u2... .u .n.ug)
三、比例加积分控制规律
Uzon
基本控制方案
UZ0U
K1
K2
d 自动倾斜器 e
S(T S1)
操纵杆
放大器忽略惯性,舵机简化为
Kf (S)
惯性积分环节 K 2
反馈元件
K f (S) 为舵回路反馈元件--位置反馈
S (T S 1)
K 1 放大器增益
K 2 舵机增益
g
K1 Ug U
U K2
U
Uf
T 舵机时间常数
e 纵向周期变距增量
主控信号:
L(g)
•
辅助信号: L •
一般形式比例式控制规律(控制性能改善)
给定装置
ug
测量元件 u1
测量元件 u 2
放大器 舵机
un
测量元件
位置反馈 直升机
K 1f (u1u2... .u .n.ug)
操纵杆系
A34 B型自动驾驶仪稳定状态控制规律
•
e
LL•
•
a
LL•
•
r
KK•
c KHH
自动驾驶仪的输入信号(综合信号)与舵机输出量(自动倾 斜器的偏转角度或角速度 )之间的函数关系,称为自动驾 驶仪的控制规律。
控制律设计方法很多,对自动驾驶仪控制律设计而言可归纳 为两种基本类型:比例式、积分式。
一、比例式控制规律
➢ 舵机输出量(自动倾斜器的偏转角)在自动驾驶仪 控制下与各输入信号之和(综合信号)成正比,此类 控制规律称比例式控制规律。 ➢ 具有比例式控制规律的自动驾驶仪成为比例式驾驶 仪。
反馈信号与俯仰角偏差信号的差值,取决于自动倾斜 器的偏转角速度。
基本控制方案
Uzon L1
K1
K2 S(T S1)
操纵杆系 e
Kf S
L1
G(S)
积分式控制律舵回路反馈元件为测速反馈
传递函数
•
•
K1K2
e
U ZON
e(S)
U (S )
1
T S 1 K1K2K
f
T S 1
K1K2
K1K2
K1
K2
d
S(T S 1)
Kf TeS 1
Kf
1 •TeS1
(S) d
Uzon
Kf
TeS
T S2 1
S1
K1K2Kf
K1K2Kf
只要满足条件: K1K2Kf 1 K1K2Kf T
(s)1•TeS11 1
时间常数较大,几秒~十 几秒。操纵量由控制信号
Kf TeS Kf KfTeS 的比例加积分量决定。
K1K2Kf 1 K1K2Kf T
自动倾斜器偏转角与综合信号成正比关系,比例系数 是位置反馈系数的倒数。
比例式自动驾驶仪
g L1
Ug
L1 U
UZ0 U
K1
K2 d S(T S1)
自动倾斜器e
操纵杆
•
L2
U•
测量元件
Kf (S) 反馈元件
•
U Z0nL 0( g)L 2
G(S)
e K L 1 f( g ) K L 2 f • L ( g ) L • •
第四章自动驾驶仪及控制规律
二、基本职能
➢ 自动测量直升机的飞行状态参数。 ➢ 将所测结果与给定(初始)状态比较,求出偏差。 ➢ 将偏差信号转换成能推动自动倾斜器偏转的信号,操纵旋
翼锥体按一定的规律倾斜,使直升机控制到给定状态/恢 复到初始状态。
[例] 驾驶员操纵作等速水平飞行
第二节 基本控制规律
L L1/Kf
eL ( g)dt
自动倾斜器纵向偏转角与俯仰角偏差的积分成正比。
仅有角位置信号的积分式驾驶仪难以稳定工作。为 了改善其稳定性 ,在引入角位置主控信号外,一般 还引入一些辅助信号,如角速度、角加速度信号。
➢纵向通道积分式驾驶仪
g
给定装置 U g g
L1
垂直陀螺 U
L1
速度装置 U •
过程分析
➢ 仅有角位置信号的自动驾驶仪 eL ( g)
俯仰角控制静态情况
对于瞬时干扰,驾驶仪稳定俯仰角不存在原理静差, 但对常值干扰则存在静差,修正力矩与常值干扰力矩 平衡时:
mye差 jc与L成反比,要 求静差小时,L须选的大。
俯仰角控制动态过程
俯仰平衡条件 LpY w pw TxYTyX0
当干扰作用时,自动驾驶仪测得俯仰角,使自动倾斜器前倾。 Tx加大 TxY加大抑制上仰恢复到原状态。
操纵量与控制信号成比例,即为比例式驾驶仪。
二、积分式控制规律
➢舵机输出量(自动倾斜器的偏转角速度)在自动倾斜器 作用下与各输入信号对时间的积分之和(综合信号)成正 比,此类控制规律称为积分式控制规律。 ➢具有积分式控制规律的自动驾驶仪称为积分式驾驶仪。
反馈信号不是与自动倾斜器的偏转成正比,而是与其 偏转角速度成正比。测速电机输出与转子转速即自动 倾斜器的偏转速度成正比。
第三节 纵向角运动控制基本工作原理
自动驾驶仪控制纵向角运动--俯仰角自动稳定与操纵
一、比例式自动驾驶仪控制俯仰角
基本工作过程 e L ( g ) L pc
受扰动产生俯仰角变化,
e L产生抑制抬头力矩
Uf
U
U Uf 自动倾斜器前倾
电 位 计 动 态 过 程 忽 略 不 计
U Uf 停止前倾 U Uf 反向恢复