三相反应式步进电机驱动器的设计
步进电机驱动器的设计问题初探
摘 要: 步进 电机驱动是步进 电机的核心组成部分 , 步进 电机驱动 器的优劣决定着步进 电机 的性能。介绍 了步进 电机驱的主要 结构 , 并以多细分 三相 步进 电机驱动 器为例 , 从硬件选型( 单片机选型 、 智能功率模 块选型等 )供 电方 、 案、 软件 开发语言的选型等方面对步进 电机驱动设计进行 了阐述 。 关键词 : 步进 电机 ; 驱动; 结构 ; 硬件选型; 软件选型 中图 分 类号 :U 5 T 84 文 献标 识 码 : A
s lt n ,ot r e eo me t a g a es lcin tp tp e tr rv n t e s e t f h e in ae d s r e . ou i s s f o wa ed v lp n n u g ee t es p r l o y e moo i ea doh r p cs ed s e c b d d a ot g r i
块 化 设 计 方 法 , 分 为 步 进 电 机控 制器 、 进 电机 驱 动 器 以 及 可 步
2 步进 电机驱 动器设计 方 案
驱动器 的总体设计根据其结构可分 为 3个部分 : 主回路
部分 、 控制电路部分及开关 电源 。 () 1主回路采用交一直一交电压型逆变电路形式 , 2 0 将 2 V、
文 章 编 号 :0 7 8 2 (00 0 — 0 8 0 10 — 30 2 1 )6 04 — 2
S e p r m o o rv rd sg r b e t p e t r d i e e i n p o lm
TUO Cha y n o- o g
( nnIs tto E c i a d c ai l ehooy C agh , u a 1 11C i ) Hua tue f  ̄ tc n h c cn l ,hn saH n n 0 5 ,hn ni r d Me n a T g 4 a
步进电机的应用—三相混合式步进电机驱动器使用说明书

三相混合式步进电机驱动器使用说明书1.特点★AC80~220V交流供电,能适应恶劣的电网环境★双极恒相流细分驱动★最大输出驱动电流6A/相(有效值,峰值达8A)★最大30000步/转的十六种细分模式可★过压、过流保护★输入信号光电隔离★可适应共阳、共阴、单/双脉冲多种模式★脱机保持功能★提供节能的自动半电流锁定功能2.性能指标供电电源80V~220VAC,容量0.8KVA输出电流有效值6A/相(峰值可达8A)(输出电流可由面板拨码开关设定)驱动方式恒相流PWM控制励磁方式400步/转,500步/转,600步/转,750步/转,1000步/转1500步/转,2000步/转,2500步/转,3000步/转,3750步/转5000步/转,6000步/转,7500步/转,10000步/转,15000步/转30000步/转绝缘电阻在常温常压下>500MΩ绝缘强度在常温常压下1KV,1分钟3.使用环境及参数冷却方式强制风冷使用环境场合尽量避免粉尘、油雾及腐蚀性气体温度0℃~+50℃湿度<80%RH,无凝露,无结霜震动 5.9m/s2Max保存温度-20℃~+65℃外形尺寸187×116×81mm重量 1.3Kg4.功能及使用★电源电压驱动器内部的开关电源设计保证了其可以适应较宽的电压范围,推荐使用80~220VAC,提高电压对提高电机的高速力矩有效,但是同时会加大运行噪音。
由于电机电磁感应回导致电机外壳生出一定的电荷,为确保使用者安全,请务必使用线径2mm2以上的机壳保护线和驱动器的机壳接地端子与保护大地可靠连接,并采用隔离变压器为驱动器供电★输出电流选择本驱动器采用双极恒流方式,最大输出电流值为6A/相(有效值),通过驱动器侧板第7,8四位开关的不同组合可以方便的选择4种电流值,从2A到6A(详见电流选择表),(注意:这里所说的电流是指驱动器每相输出电流的有效值,使用串电流表的方式不能得到正确的读数。
SJ-3H110MB 三相混合式步进电机细分驱动器 说明书

SJ-3H110MB 三相混合式步进电机细分驱动器一、性能简介SJ-3H110MB 三相混合式步进电机驱动器把交流伺服电机驱动器原理应用到步进电机驱动器中,输入的220VAC 经整流后产生325VDC ,再经调制器调制为325V 阶梯式正弦电流波形,每个阶梯对应电机转动一步,通过改变驱动器输出电流的频率来改变电机转速,而输出的阶梯数确定了电机转过的角度。
SJ-3H110MB 混合式步进电机驱动器,具有以下特点:1.采用交流伺服控制原理,在控制方式上增加了全数字式电流环控制,三相正弦电流驱动输出,使三相混合式电机低速无爬行,无共振区,噪音小。
2.驱动器功放级的电压达到DC325伏,步进电机高速运转仍然有高转矩输出。
3.具备短路、过压、欠压、过热等完善保护功能,可靠性高。
4.具有细分、半流和掉电相位记忆功能。
5.具有多种细分选择,可控制电机在任意细分状态下精确定位,最小步距角可设为0.036°(10000步/转)。
适用 面广,通过设置不同相电流可配置各种电机。
二、电气技术参数输入电源 AC220V -15%~+10% 50/60HZ 5.5A(MAX) 输出相电流 1.7A ~6.8A 适配电机 三相混合式步进电机工作环境 0℃~50℃ 15~85%RH 、不结露。
无腐蚀性、易燃、易爆、导电性气体、液体和粉尘。
存放环境 0℃~50℃ 15~85%RH 、不结露。
驱动方式 PWM (脉宽调制)恒流斩波,三相正弦波电流输出。
步距角 0.036°、0.045°、0.06°、 0.072°、0.09°、0.12°、0.15°、0.18°、0.225°、0.3°、0.36°、0.45°、0.6°、 0.72°、0.9°、1.8°电机步数 10000、8000、6000、5000、4000、3000、2400、2000、1600、1200、1000、800、600、500、400、200 步距角设定 DIP 开关(SW1.2.3.4) 输入信号 CP+/CP-;DIR+/DIR-;EN+/EN-输入电平 5V 时输入信号不需串电阻,12V 时串入1K 电阻,24V 时串入2K 电阻。
三相反应式步进电动机的工作原理
三相反应式步进电动机的工作原理
三相反应式步进电动机是一种常见的电动机类型,其工作原理基于电磁感应的基本原理和步进电机特有的结构。
这种电动机能够将电能转换为机械能,实现精确的步进运动,广泛应用于自动控制系统、医疗设备、打印机等领域。
这种电动机的核心部件包括定子(驱动器)和转子(旋转部件)。
定子中包含着三个电磁线圈,分别对应三相电源的各个相位。
通过依次对这三个线圈通电,可以产生可旋转的磁场,从而驱动转子旋转。
而转子上的磁铁则会受到这一磁场的作用,从而实现转子的步进运动。
三相反应式步进电动机的原理可简要概括如下:
1.相位控制:通过周期性地改变各个相位线圈的通电顺序和电流大小,可以控制电
动机的旋转方向和速度。
这种相位控制能够确保电动机按照精确的步进角度进行旋转。
2.磁场互动:当线圈中通入电流时,会在定子中产生磁场。
这些磁场与转子上的磁
铁相互作用,导致转子受力从而旋转。
通过调整电流和相位的变化,可以控制磁场的大小和方向,实现对转子的精准控制。
3.步进运动:电动机通过依次激活不同线圈,将磁场旋转到不同的位置,从而推动
转子按照固定的步进角度旋转。
这种步进运动特点使得电动机能够实现非常精确的位置控制,适用于需要高精度定位的场合。
总的来说,三相反应式步进电动机的工作原理基于电磁感应和磁场互动的基本原理,通过精确的相位控制和步进运动实现了对转子的精准控制。
这种电动机在自动化控制领域发挥着重要作用,为各种设备的准确运动提供了可靠的驱动力。
1。
基于反激式电源的三相步进电机驱动器设计
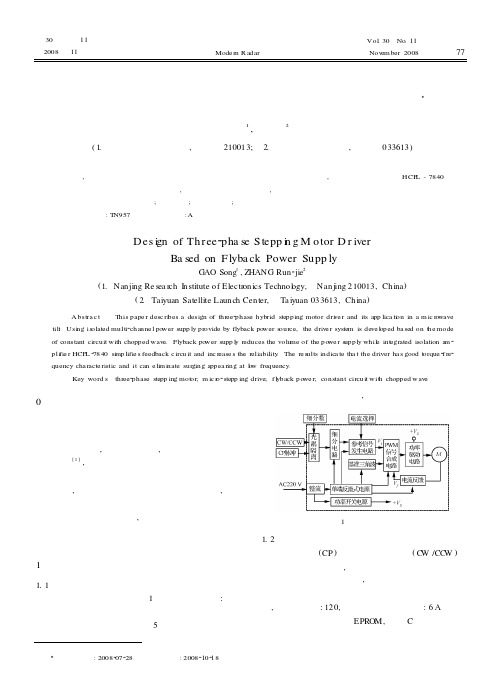
天馈伺系统基于反激式电源的三相步进电机驱动器设计3高 嵩1,张润杰2(1.南京电子技术研究所, 南京210013; 2.太原卫星发射中心, 太原033613)【摘要】 介绍了一种三相混合式步进电机驱动器的设计及其在某微波云台中的应用。
利用反激式电源提供的多路隔离电源,设计出基于斩波恒流驱动方式的驱动器。
反激式电源大大减小电源体积,运用集成隔离放大器HCP L-7840使得反馈电路简单、可靠性高。
结果表明,本驱动器消除了低频振荡,有良好的矩频特性。
【关键词】 三相步进电机;细分驱动;反激式电源;斩波恒流中图分类号:T N957 文献标识码:ADes i gn of Thr ee2pha se S tepp i n g M otor D r iverBa sed on F lyba ck Power Supp lyG AO Song1,ZHANG Run2jie2(1.Nanjing Re sea r ch I nstitute of Electr onics Technol ogy, Nanjing210013,China)(2.Taiyuan Satellite Launch Center, Ta iyuan033613,China)【Abstra c t】 T his pape r desc ri bes a design of three2phase hybrid stepping motor dri ve r and its app lica ti on in a m ic ro wave i ng is olated multi2channe l po wer supp ly provide by flyback po wer s ource,the driv e r system is deve l oped ba sed on t he mode of constant circuit with chopped wav e.Flyback po wer supp l y reduces the volu me of the po we r s upply whil e int egrated isolation a m2 pli fie r HCP L27840si mp lifie s feedback c ircu it and inc rease s the reliability.The re s ults indica te tha t the driver ha s good t orque2f re2 quency cha racte ristic and it can e li m i nate surging appea ring at l o w frequency.【Key word s】three2phase stepp ing mot or;m ic r o2stepp ing drive;f l yback po we r;constant circuit wit h chopped wav e0 引 言恒相流正弦波细分驱动器是目前较先进的步进电机驱动方式。
步进电机驱动器设计及技术改进
步进电机驱动器设计及技术改进摘要:本文分析了步进电机的应用及其驱动技术研究,给出了设计软件程序实例、硬件原理图及输出波形图,并提出了相应的改进措施。
关键词:步进电机环形分配细分步进电机结构简单而且控制方便,在机械及自动控制等领域应用较普遍,但是步进电机也存在步距角较大、低频振动等缺点,如需在精度要求较高的工程中应用,除要提高制造工艺,选取高精度高性能的步进电机外,对步进电机驱动技术的研究也是很有必要的。
1 步进电机工作原理步进电机是一种将电脉冲信号转化为角位移的执行机构,它有别于普通的旋转电机,步进电机的旋转运动和输入的脉冲个数有严格的对应关系,并以此来控制其角位移量,同时依靠步进电机特有的自锁能力使其保持在目标位置。
2 驱动器设计步进电机运动方式的特殊性决定了它需用一个专用的驱动器来供电,驱动器主要功能是对输入脉冲分配后再进行功率放大,放大后的功率信号按特定顺序轮流加到电机绕组的两端,控制步进电机运动。
驱动器主要由环形分配器、功率放大器及其他控制电路组成,其中环形分配器是步进电机驱动器设计的关键。
目前的DSP技术发展较快,特别是美国TI公司的2000系列DSP 是专为控制各种电机设计的,本文以TMS320LF2407控制两相四拍的步进电机为例,主要介绍最常用的两种设计环形分配器的方案:一是通过DSP的PWM口,在程序里对EV A或者EVB的4个PWM口进行精确的时序分配,利用纯软件的方法实现环形分配器;二是以专业的芯片电路为基础,如集成电路芯片L297+L298组成得驱动电路或者THB7128芯片等,利用DSP的I/O口即可实现对环形分配器的控制。
两种方案各有优缺点,下面详细介绍两种方案实现方法。
2.1 硬件实现环形分配器本文选取比较常用的集成电路芯片L297和L298的组合,该方案特点是控制简单,只需要对L297芯片的几个输入端进行控制即可,其中包括脉冲信号CLK、方向控制信号CW/CCW、半步和整步选择控制信号HALF/FULL 以及使能信号EN。
三相反应式步进电机驱动器的设计
f) , f 凡¨,J .、 ・, 、 。 『1
、
f’ 、 l
。/
, 1l.f\f: f , , j
1 ]: 1 : ll l
.
.
将这 些 脉冲 信 号转换 成 与之 相 对 应的 角位 移或 直线 位 移 。步 进
动 微 型 步 进 电 机 。引 脚 如 图 2所 示 。各 引脚功 能说 明 :
l 羹 i
誓 l 誊 i ti 1 譬 l l i i l ¥i t
。
维普资讯
( 自动化 技术 与应 用> 02 第 2 卷第 五期 20 年 1
等 不 同的逻辑 电路 。此 外 , 31 采 用 单/ 电源 供 电, I 3可 M 双 电压 范 围为 4 4V, 出也 高 达 4V。I( I ) 电流 源 输 出端 , f -0 输 0 R PN1 为 在 o
( ) 出逻辑低 电平 时, P 输 电流源 I 输 出对 电容 充 电。 引脚 2 R
机的正 反转 由 U D( I4 脚 来控 制 。在 电路 处 于 单 时钟 输 入控 / PN ) 制 的前提 下 , U D=高 电平 时 , 当 / 则输 出端 输 出正 转 脉 冲 序 列 ;
当 U D=低 电平 时, / 则输 出端 输 出反 转 脉 冲序 列 。E ( ) AP 和 E (丑 ) B P 为激 励方 式选 择端 。E E =0 A B 0时 , 为双激 励 方式 : A B EE l 时 , 1—2相 激 励 方 式 ; A B=0 1 为 EE 1或 1 ( 两 电平 相 反 ) 0即 时, 为单激 励方 式 。3 4 P ) / ( D 为三 相 或 四相 选 择控 制 端 。当该 脚 =0时, 为三 相输 出; 当该 脚 =1时 , 思 想输 出 , 过 该 脚 可 为 通
三相反应式步进电机驱动器的设计与实现
0 引言
人工智能是指研究、开发用于模拟、延伸和扩展人的职能 的理论、方法、技术级应用系统的一门新的技术科学[1],在工 程、技术研究等领域很多方面都有广泛的应用,为国民经济的 发展和人类生活的改善作出了巨大的贡献。以下将对人工智能 技术在电气自动化控制方面的应用作一探讨。
1 人工智能控制优势分析
人工智能控制的方法有很多种,对于不同的控制类型通常 采取不同的控制方法。人工智能主要利用人工智能函数近似器 加以处理[2],例如 AI 控制器,神经、模糊、模糊神经以及遗传算 法都可看成一类非线性函数近似器。它具有很多常规函数估计 器所不具备的优势:(1)设计思路简单。人工智能的设计不需要 控制对方的模型,而传统的古典控制器要在对方的模型上加以 设计,并且存在的不确定因素较多[3],例如很难得到控制对象 的精确动态方程,参数变化,非线性时往往不知道,也是造成传
步进电机以其良好的可操控性,在生产、生活的各个环节 都得到了广泛的应用,尤其是在自动化水平不断提高的今天, 步进电机更具有良好的应用前景,如在微控制、精确控制、特种 控制等方面发挥了重要作用。反应式步进电机步距角为 1.5°,转 子上均匀分布一些小齿,定子齿有 3 个励磁绕阻,其几何轴线依 次分别与转子齿轮轴线错开。电机的位置和速度与导电次数(脉 冲数)和频率成一一对应的关系,其方向由导电顺序决定。
统古典控制器的弊端。(2)控制器的性能得以提高。人工智能控 制器改变了相关参数,例如响应时间、下降时间等,性能得到很 大的提高。比如,现在使用的模糊逻辑控制器的上升时间比最 优 PID 控制器快 1.5 倍,下降时间快 3.5 倍。(3)简单容易操作。 古典控制器存在着调节能力差的缺陷,而人工智能控制器相对 而言降低了控制难度,对新信息和数据的适应能力也得到了改 进。在不具备相关专业知识的情况下,也可以通过相关信息提示 进行设计,相对而言简单且容易操作。
三相步进电机工作原理
三相步进电机工作原理
三相步进电机是一种常见的电动机,其工作原理基于电磁感应和电力磁场的相互作用。
它包括一个定子和一个转子,定子上有三个互相平移120度的电磁线圈,每个线圈都与一个电流驱动器相连。
当电流通过一个线圈时,会在定子上产生一个磁场。
定子的磁场与转子上的磁化方向相互作用,使得转子受到电磁力的作用而转动。
当线圈内的电流方向发生改变时,正则磁场的磁化方向也会改变,从而使得转子重新定位,完成一步运动。
步进电机的转子通常由多个极对组成,每一对极都对应着一个步进角度。
步进角度是转子固有的特性,它取决于电机的结构和设计。
通过控制电流驱动器的输出电流和方向,可以精确地控制步进电机的旋转角度和速度。
三相步进电机的工作原理可以用磁场的交替变化来描述。
当电流依次流过三个线圈时,每个线圈的磁场都会相继产生并作用于转子。
通过改变三个线圈的电流和方向,可以使得转子逐步完成全转。
总的来说,三相步进电机的工作原理是通过改变电流驱动器的输出电流和方向,使得定子的电磁线圈产生磁场,并通过与转子上的磁化相互作用,实现转子的步进运动。
DY3系列三相混合式步进电机驱动器
一、型号说明:12=,13=,24=二、性能简介混合式步进电机采用稀土永磁材料制造,与反应式步进电机相比具有电磁损耗小、转换效率高、动态特性好等优点。
混合步进电机的电磁静力短为电机阻尼。
取消了反应式电机的机械阻尼盘,无需人工调整,运行平稳、噪音小、不易失步。
混合式步进电机取代反应式电机是经济型数控系统的发展趋势。
我厂研制的DY3系列三相混合式步进电机驱动电源,具有以下特点:*技术新:应用微电子技术,将单片机嵌入驱动器内,使控制性能提高,电路简化;功放采用三菱公司智能模块(I P M),具备过载、短路、过压、欠压、过热等完善保护功能,可靠性极高;驱动器内低压直流电源应用开关电源技术,使电源电路体积小,稳定可靠。
*微步距:运用矢量细分技术,可控制步进电机转过的最小角度为电机步距角的1/20(°)。
微步距控制可使步进电机低速运行平稳,其运行效果接近交流伺服。
微步距驱动器与μm()级CN C控制系配套.可使数控机床的最小移动量控制接近μm,对加工弧面、锥面、螺纹等工件,能明显提高工件表面的精细效果。
*高转矩步进电机输出转矩与注入电流成正比,高速运转时注入电流大小与驱动器功放级使用的电压成正比,目前大部分步进电机驱动器功放级。
由于技术限制,所使用的电压在DC150伏以下,而DY3步进电机驱动器功放级的电压达到DC310V,因而驱动步进电机高速运转时仍然有高转矩输出。
*高可靠性控制部分集成度高、功放级采用三菱公司的智能模块,整机结构紧凑、电路简练、接插件少、机外风冷散热设计可减少粉尘侵入机内,设有超温、过压、欠压、保护、报警信号输出。
三、技术参数四、工作原理当电机三相绕组通入正弦波电流(三相电流相位差为120°)时,该电流在电机的气隙中产生一个空间幅值恒定的旋转磁势,该空间磁势的大小和方向与各相的电流的顺序和大小有关,并且要求驱动系统在电机绕组中的电流为双向的分级变化的阶梯波(当分级数无限增加时,电流波将形成正弦波),各相电流之间的相位差为120°。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
为双 列 直插 式 8脚 芯 片 ] .
L 3 M3 1内部 有 输 入 比较 电路 、 时 比较 电路 、 S触 发 电路 、 零 晶 体 管 、 出 驱 动管 、 定 R— 复 输 能 隙基 准 电路 、 密 电 流源 电路 、 精 电流 开 关 、 出保 护 电 路等 部 分 . 出管 采 用 集 电极 开 路 形 式 , 输 输 因此 可 以通 过 选择 逻 辑 电 流 和外接 电阻 , 活 改 变输 出脉 冲 的逻 辑 电平 , 而适 应 T 灵 从 TL、 DTL 和C MOS等 不 同 的逻辑 电路 . 外 , M3 1可采 用 单 / 电 源供 电 , 此 L 3 双 电压 范 围为 4 4 , 出 ~ OV 输
D 复位 为 表 1 示 的初 始 状 态. 其 中 0表 示低 电平 , 表 示 高 电平 ) 所 ( 1 Ⅲ.
表 1 P M8 1 M 7 3激 励 方 式 选 择 和 初 始 状 态
T be 1 S lcin & i ta tt fP M 8 1 mp lemo e a l . ee to ni lsaeo M i 7 3 i u s d
文 章 编 号 :0 91 3 ( 0 3 0 —0 60 1 0 —1 0 2 0 ) 10 5 —3
三 相 反 应 式 步 进 电机 驱 动 器 的设 计
李致 金 多汾 峪 ,
( . 海 大 学 计 算 机 及 信 息 工程 学 院 , 苏 常 州 2 3 2 ; 2 山 西 省 万 家寨 引黄 工 程 总 公 司 , 1河 江 102 . 山西 太 原 0 0 1 ) 3 02
中 图分 类 号 : 3 2 TM 0 文献 标识码 : B
随着 运 动控 制 系 统 中数 字 化 技 术 的发 展 与 成 熟 , 进 电 机 在 工业 自动化 控 制 中得 到 了广 步 泛 的 应 用 . 进 电机 是 一 种 完 成数 字 信 号 / 拟 信 号转 换 的执 行 元 件 , 区别 于其 他 控 制 用 途 步 模 它 电动 机 的最 大 特点 是 : 能接 收数 字 控 制信 号 ( 电脉 冲信 号 ) 并将 这 些脉 冲信 号转 换 成 与之 相 对 ,
1 P M8 1 M 7 3芯 片 及 L 3 1芯 片 简 介 M 3
aP . MM8 1 7 3是 日本 S n o电机 公 司 生 产 的 、 于 步 进 电机控 制 的脉 冲 分配 器 ( ay 用 又称 逻 辑 转 换 器 ) 为 双列 直 插 式 1 , 6脚 单 片 C MOS集成 芯 片. MM8 1 P 7 3既可 以用 于 3相 控 制 , 可 以 又 用 于 4相 控 制. 磁 有 1相 、 和 12相 三 种 方 式 , 过 电路 设 计 可 任选 其 中一 种 激励 方 式. 砺 2相 — 通 此 外 , MM8 1 P 7 3还 具 有 单 时 钟 或 双 时 钟 工作 方式 , 有 正 反 转 控 制 以及 初 始 化 复 位 功 能 , 带 其 内部 有 时钟 选 通 、 激励 方 式 控 制 、 可逆 环 形 计数 、 励 方式 判 断 等 电路 . 激 P MM8 1 7 3所 有 输 入 端 均 采 用 施 密 特 整 形 电 路 , 此 抗 干 扰 能 力 强 ; 出 电 流 大 于 因 输 2 OmA, 可直 接 驱 动 微 型 步 进 电机 . 励 方 式 选 择 如 表 1所 示. A P N5 和 E ( I ) 激 励 激 E (I ) eP N6 为 方 式 选择 端 . A 0时 , 双激 励方 式 ; e 1 E E 一0 为 E E 一 1时 , 1 2相激 励 方 式 ; A 一0 为 — E Ee 1或 1 0 ( 电平 相 反 ) , 两 时 为单 激 励 方 式 . / ( I ) 3相 或 4相 选 择 控 制端 , 过 该 脚 可 以选 择 控 3 4 P N7 为 通
收 稿 日期 : 0 20 — 7 2 0 — 60
作者 简 介 : 致 金 ( 9 3 )男 , 苏 南 京 人 , 士研 究 生 , 信 与 信 息 系 统 专 业 李 17 一 , 江 硕 通
维普资讯
第 1 卷 第 1期 7
李致金 , 等
三 相 反 应 式 步 进 电机 驱 动 器 的 设 计
摘 要 : 绍 步 进 电机 驱 动 器 的 一 种 设 计 方 法 . 计 时 将 L 3 1芯 片 接 成 电 压 / 率 ( F) 换 方 介 设 M 3 频 V/ 转 式 , 输 入 控 制 电 压 转 换 成 一 定 宽 度 的 脉 冲 信 号 . 向 控 制 信 号 由 电 压 比 较 电 路 生 成 . M M8 1 将 方 P 73
应 的角 位 移或 直线 位 移 . 进 电机 必 须与 相 应 的驱 动 电路 配 合 使 用 , 工 作 性 能在 很 大程 度 上 步 其
取 决 于 所使 用 的驱 动 电路 的类 型 和实 际 参数 , 因此 , 步进 电机驱 动 电路 的设 计是 步进 电机 控 制 系统 中的关 键 . 所周 知 : 众 电动 机 的各 相 绕 组之 间 、 转 子之 间 存 在一 定 的强 耦 合 , 定 电磁关 系也
i no e e Ec no y Ag s n K wl dg o m e
zH A N G W A N G i M n
l
( ol e f nen t n ln ut a &C mm reHo a Un .C agh u2 3 2 ,hn C l g trai a Id sr l o ec , h i i , h n zo 10 2C ia) e oI o i v
5 7
制 3相或 4相步 进 电机 . A~D( I 3 I O 为 4个 相 驱 动 端 , P N1 ~P N1 ) 3相 用 A~C( D— O , 用 ) 4相
A~D 端 . M ( I 4 是激 励 方 式 状态 标 志 . P N9 为 复 位 控 制 端 , 低 电平 使 输 出端 A~ E P N1 ) R( I ) 加
[] 张彦宁・ 4 国际企业管理新趋势口]企业管理,98 2 : 8 ・ 19 ()7 ・ — [] 杨宝云. 5 中国企业管理创新 目标模式初探[] 内蒙古社会科学,00 3 :811 J. 20 ()9—0.
i
; l I
T eNe rn so n gme t raii h w T ed f Ma ae n et t C vy
的 电压 大 于 i 入 端 的 电 压 时 , 输 出 逻 . 输 辑低 电平 . 同时 电流 源 对 电容 C 充 电 , 电
图 l 系统 框 图
Fi g.1 Bl c di g am he Sy t m o k a r oft s e
源 也 通过 电 阻 足 对 电容 C 充 电. 电 容 C 两 端 的充 电 电压 大 于 的 2 3时 , 出 端 当 / 输
输 出为 逻辑 高 电平 . 时 , 此 电容 C 通 过 内部 电路 放 电 , 对 电阻 尺 C 放 电. C 放 电 电压 等 于 当 输 入 电压 。 , 入 比较 器再 次 输 出高 电平 , 输 出逻 辑 低 电平 . 此 反 复循 环 , 成 自激 振 时 输 如 构 荡 . 由运 动 控 制 系统 输 出 的可 变 电压 信 号 , L 3 1变换 后 产 生可 变 的频 率 信 号 经 M 3 . 输 出至 P MM8 1 7 3芯 片 的 时钟 端 , P 经 MM8 1 7 3处 理后 , A, C脚 输 出一定 频 率 的 驱 动 信 号 , 在 B, 控制 功 率 三极 管 的导 通 时 间 , 而控 制 步进 电机 的转 速 . 据 电 容 上 电荷 平衡 原 理 和 相关 的电 从 根 学 知识 , 以推 导 出 : o 。(。 R )2, 中 : 为 充 电时 间 , 可 f —V / t [ 式 I ] t 。 由定 时元 件 C 和 尺 决 定 ; 为 内部 精 密 电 流源输 出 电流 . 由该式 可 得 : 出频 率 和输 入 电压 i 正 比. 输 成 方 向控制 电路 由 L 3 8四 电路 通用 运 算 放 大 器 构 成 . 部方 向控 制 信 号 通 过 L 4 M 4 外 M3 8和 基准 电压构 成 电压 比较 电 路. 当 a 于基 准 电压 w时 , A 输 出 为 正 , 至 P i 大 U3 接 MM 8 1 7 3的第 4脚 , 制 输 出端 输 出正 相脉 冲序 列 ; 控 当 a 于基 准 电压 . 小 时 , 出 端 为负 , 至 P 输 接 MM8 1 73
维普资讯
维普资讯
l l
{ l
{;
第7第 期 l l 卷
张 普等 知 经 时 企 管 创 的 趋 , 识 济代业 理 新新 势
3 7
l }
I i
l j l
E 哈 德.L 海因 韦 . 理 M . 版 经 科 版 1 6 7 4 2 罗 孑茨, 茨・ 里克 管 学[] 3 第9 . 济 学出 社, 9: — . 9 26 - i 章路 . 经 企 管 新口 . 西 经大 学 2 o J 2 2. 3 3 尔 知识 济与 业 理创 ] 财 学 报, o( ) 4 6 山 o  ̄ :—
O
O
O
1 —2相 2相
。
1 0
0 0
1 1 O
O O O
1 1 O
O O O
1 相
叭 10 /
0
b L 3 1是美 国 NS公 司 生产 的性 能价 格 比较 高 的集成 芯 片 . M3 1可 用作 精 密 的频 率 .M 3 L 3
有 较 严 进 电机 的 控 制 , 但 对 就是 按 一定 的 相序 向其 相 线 圈