4方式控制字及状态字
8254定时计数器应用实验报告
XX 大学实验报告课程名称:实验项目名称:8254定时/计数器应用实验学院:信息工程学院专业:通信工程指导教师:报告人:学号:班级:实验时间:实验报告提交时间:教务处制单元的内容外,还可以读出状态寄存器的内容。
(6)计数脉冲可以是有规律的时钟信号,也可以是随机信号。
计数初值公式为:n=fCLKi÷fOUTi、其中fCLKi 是输入时钟脉冲的频率,fOUTi 是输出波形的频率。
图(1)是8254 的内部结构框图和引脚图,它是由与CPU 的接口、内部控制电路和三个计数器组成。
8254 的工作方式如下述:(1)方式0:计数到0 结束输出正跃变信号方式。
(2)方式1:硬件可重触发单稳方式。
(3)方式2:频率发生器方式。
(4)方式3:方波发生器。
(5)方式4:软件触发选通方式。
(6)方式5:硬件触发选通方式。
图(1)8254的内部借口和引脚8254 的控制字有两个:一个用来设置计数器的工作方式,称为方式控制字;另一个用来设置读回命令,称为读回控制字。
这两个控制字共用一个地址,由标识位来区分。
控制字格式如表1所示。
表1 8254的方式控制字表2 8254 读出控制字格式表3 8254 状态字格式8254 实验单元电路图如下图所示:五、实验步骤及相应操作结果1. 计数应用实验编写程序,将8254 的计数器0 设置为方式3,计数值为十进制数4,用单次脉冲KK1+作为CLK0 时钟,OUT0 连接MIR7,每当KK1+按动5 次后产生中断请求,在屏幕上显示字符“M”。
实验步骤:(1)实验接线如图2所示。
(2)编写实验程序,经编译、链接无误后装入系统。
(3)运行程序,按动KK1+产生单次脉冲,观察实验现象。
(4)改变计数值,验证8254 的计数功能。
图2 8254 计数应用实验接线图实验程序清单A8254 EQU 06C0HB8254 EQU 06C2HC8254 EQU 06C4HCON8254 EQU 06C6HSSTACK SEGMENT STACKDW 32 DUP(?)SSTACK ENDSCODE SEGMENTASSUME CS:CODE,SS:SSTACKSTART: PUSH DS运行结果如下:改变计数值MOV DX,CON8254MOV AL,10HOUT DX,AL六、实验结论:。
SEW变频器控制字状态字
1=limit switch CW activated 0=not activated
1=limit switch CCW activated
使用 控制器禁止:0001hec
快停:0000hec 正常停车:0002hec
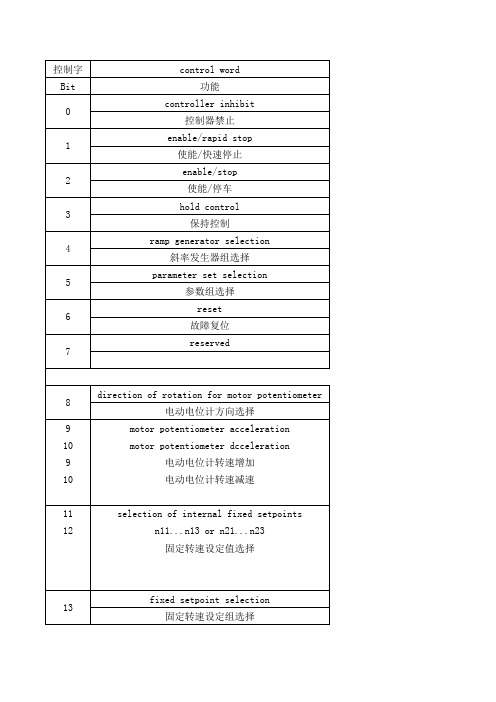
parameter set selection 参数组选择 reset 故障复位 reserved
direction of rotation for motor potentiometer 8
电动电位计方向选择
9
motor potentiometer acceleration
10
motor potentiometer dcceleration
9
电动电位计转速增加
10
电动电位计转速减速
11
selection of internal fixed setpoints
12
n11...n13 or n21...n23
固定转速设定值选择
fixed setpoint selection 13
固定转速设定组选择
14 15
状态字 Bit 0 1 2 3 4 5 6 7
limit switch CW active 到达CW限位开关
limit switch CCW active 到达CCW限位开关
0=enable 1=inhibit controller,actibate brake
0=rapid stop 1=enable
0=stop with generator ramp or process ramp 1=enable
0=hold control not active 1=hold control active 0=ramp generator 1 1=ramp generator 2 0=parameter set 1 1=parameter set 2 0=not active 1=reset fault
485通信讲解(附案例)

8 ~15 预留
RS485通讯协议
响应字(码)
参数操作错误(响应字=7时)内容定义列表
错误号
内容描述
0 非法参数号
1 参数不允许设置(参数只读)
2 参数数值超限
12 密码错误
101 参数数据无法更改(运行中不可更改)
其它 预留
RS485通讯协议
功能码设定/实际值(2个字节,16BIT) 对应功能码号的参数值或错误参数代码。当功能码操作正确时,功能码的实际 返回值用一个字(2个字节)表示;如果功能码操作不正确则用低字节返回操 作错误代码,此时高字节为0;遵循先发高字节,再发低字节的原则
7 6 5432 1 0
RS485案例
应用案例
说明:使用通信控制变频器时,请先检查硬件是否连接好。同时,将变频器 的通信数据格式,波特率,以及通信地址设置好。如果是用在PROFIBUS上, 还需选定PPO参数(F9参数组)。本文例子中默认变频器使用长桢进行通信 。
1、以50Hz运行2#变频器。(此例需要将变频器频率设定成F0.03=6)
数据帧格式示意图
起始字节 (字节)
从机地址 (字节)
功能码操作 命令/响应 (字节)
功能码号 (字节)
功能码设 定/实际值
(字)
控制/状 态字
(字)
主设定/ 实际值
(字)
异或校验 (字节)
1514 13 12 1110 9 8 7 6 5 4 3 2 1 0
RS485通讯协议
故障代号
故障代号 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
=68H:特殊报文 =7EH:短帧 =02H:长帧
RS485通讯协议
从机地址 数据含义:从机的本机地址 从机地址范围2 ~126,127为广播地址,0、1号地址保留。从站数目超出29个, 要求使用中继器,同时中继器将占用从机数目。从机的群组地址与本机地址不 同时使用。地址字节最高位为0表示是本机的单机地址,为1表示是群组地址。
微机填空题
1.接口是微处理器与外界的连接部分,是CPU与外界进行信息交换的中转站。
2.为了完成CPU与I/O设备之间的信息交换,通常在接口部件中需要传输三种信息,即数据信息、状态信息和控制信息。
3.数据信息形式可分为数字量、模拟量和开关量三种。
4.在接口电路中,按接口寄存器存放信息的物理意义来分,端口可分为数据端口、状态端口和控制端口三类。
5.端口地址译码的方法可分为固定式地址译码和可选式地址译码。
6.CPU与外设之间的数据传送方式可分为程序控制方式、中断传送方式和DMA传送方式三种。
7.程序控制方式是指输入/输入指令来控制信息传送,是软件的控制方式,根据程序控制的方法,可分为无条件传送方式和条件传送方式。
8.计算机在执行正常程序的过程中,当出现某些紧急情况、异常事件或其他请求时,处理器会暂时中断正在运行的程序,转去执行对紧急情况或其他请求的操作处理,处理完成后,CPU回到被中断程序的断点处接着继续执行,这个过程称为中断。
9.DMA是指外设与存储器或者存储器之间直接传输数据的方式。
10.接口技术的发展趋势是大规模和超大规模芯片,并向智能化、技术化、系列化和一体化方向发展。
11.用IN、OUT指令访问端口时,端口地址在一个字节范围内,用直接寻址,端口地址超过一个字节范围,用DX寄存器间址。
第二章1.总线是一组能为多个部件分时共享的公共信息传送线路,即系统之间、模块之间、芯片内部用来传递信息的信号线的集合。
分时和共享是总线的两个主要特征。
2.每一种总线都具有规范说明,一般包括:机械结构规范、时序规范、电子规范和功能结构规范。
3.在计算机系统中,总线按信息传送的方向,可分为单向总线和双向总线。
4.在计算机系统中,总线按传送信息的类型,总线可分为数据总线(传送数据)、地址总线(传送地址)和控制总线(传送控制信息)。
5.在计算机系统中,总线按数据在总线中是同时传送还是逐位传送,总线分为并行总线和串行总线数据的各位能同时传送的总线称为并行总线,数据需要逐位依次传送的总线称为串行总线。
控制字状态字列表
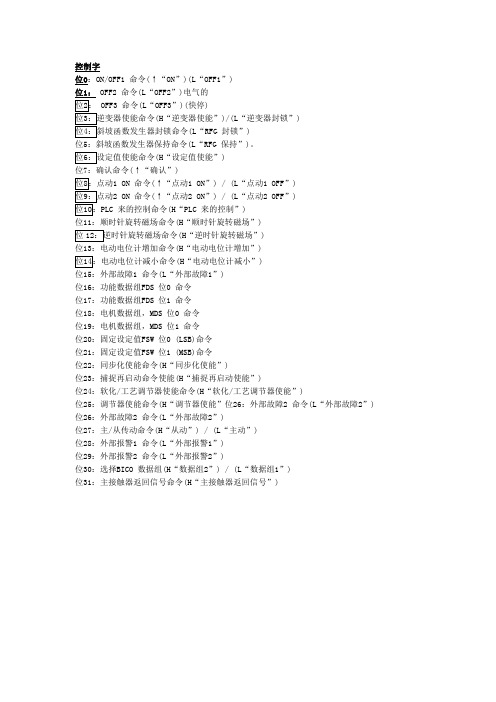
控制字位0:ON/OFF1 命令(↑“ON”)(L“OFF1”)位1: OFF2 命令(L“OFF2”)电气的命令(L“OFF3”)(快停)(H“逆变器使能”)/(L“逆变器封锁”)(L“RFG 封锁”)位5:斜坡函数发生器保持命令(L“RFG 保持”)。
(H“设定值使能”)位7:确认命令(↑“确认”)1 ON 命令(↑“点动1 ON”) / (L“点动1 OFF”)2 ON 命令(↑“点动2 ON”) / (L“点动2 OFF”)PLC 来的控制命令(H“PLC 来的控制”)位11:顺时针旋转磁场命令(H“顺时针旋转磁场”)(H“逆时针旋转磁场”)位13:电动电位计增加命令(H“电动电位计增加”)(H“电动电位计减小”)位15:外部故障1 命令(L“外部故障1”)位16:功能数据组FDS 位0 命令位17:功能数据组FDS 位1 命令位18:电机数据组,MDS 位0 命令位19:电机数据组,MDS 位1 命令位20:固定设定值FSW 位0 (LSB)命令位21:固定设定值FSW 位1 (MSB)命令位22:同步化使能命令(H“同步化使能”)位23:捕捉再启动命令使能(H“捕捉再启动使能”)位24:软化/工艺调节器使能命令(H“软化/工艺调节器使能”)位25:调节器使能命令(H“调节器使能”位26:外部故障2 命令(L“外部故障2”) 位26:外部故障2 命令(L“外部故障2”)位27:主/从传动命令(H“从动”) / (L“主动”)位28:外部报警1 命令(L“外部报警1”)位29:外部报警2 命令(L“外部报警2”)位30:选择BICO 数据组(H“数据组2”) / (L“数据组1”)位31:主接触器返回信号命令(H“主接触器返回信号”)状态字位0:“开机准备”信号(H) 位1:“运行准备”信号(H)位2:“运行”信号(H)位3:“故障”信号(H)位4:“OFF2”信号(L)位5:“OFF3”信号(L)位6:“开机封锁”信号(H)位7:“报警”信号(H)位8:“设定值-实际值偏差”信号(L)位9:“需要控制PZD”信号(H)位10:“达到比较频率”信号(H)位11:“低电压”信号(H)位12:“主接触器接通”信号(H)位13:“斜坡函数发生器激活”信号(H)位14:“顺时针旋转磁场”信号(H) /“逆时针旋转磁场”信号(L) 位15:“KIB/FLN 激活”信号(H)位16:“捕捉再启动激活”信号(H)位17:“达到同步”信号(H)位18:“超速”信号(L)位19:“外部故障1”信号(H)位20:“外部故障2”信号(H)位21:“外部报警”信号(H)位22:“变频器I2t 报警”信号(H)位23:“变频器的超温故障”信号(H)位24:“变频器超温报警”信号(H)位25:“电机超温报警”信号(H)位26:“电机超温故障”信号(H)位27:备用位28:“电机堵转/失步故障”信号(H)位29:“旁路接触器接通”信号(H)位30:“同步误差报警”信号(H)位31:“激活预充电”信号(H)。
微机原理实验报告
微机原理实验报告班级:自动化72组员梁慕佳 07054031张乐 07054033张林鹏 07054034实验一:8255 并行接口实验1 实验目的1. 学习并掌握8255 的工作方式及其应用;2. 掌握8255 典型应用电路的接法。
2 实验设备PC机一台,TD-PITE 实验装置一套。
3 实验内容1. 基本输入输出实验。
编写程序,使8255 的A口为输入,B口为输出,完成拨动开关到数据灯的数据传输。
要求只要开关拨动,数据灯的显示就发生相应改变。
2. 流水灯显示实验。
编写程序,使8255 的A口和B口均为输出,数据灯D7~D0由左向右,每次仅亮一个灯,循环显示,D15~D8与D7~D0 正相反,由右向左,每次仅点亮一个灯,循环显示。
4 实验原理并行接口是以数据的字节为单位与I/O 设备或被控制对象之间传递信息。
CPU和接口之间的数据传送总是并行的,即可以同时传递8 位、16 位或32 位等。
8255可编程外围接口芯片是Intel公司生产的通用并行I/O 接口芯片,它具有A、B、C 三个并行接口,用+5V单电源供电,能在以下三种方式下工作:方式0--基本输入/输出方式、方式1--选通输入/输出方式、方式2--双向选通工作方式。
8255的内部结构及引脚如图2-6-1 所示,8255工作方式控制字和C口按位置位/复位控制字格式如图2-6-2所示。
图2-6-1 8255内部结构及外部引脚图图2-6-2 8255控制字格式5 实验步骤1. 基本输入输出实验本实验使8255 端口A工作在方式0 并作为输入口,端口B工作在方式0 并作为输出口。
用一组开关信号接入端口A,端口B 输出线接至一组数据灯上,然后通过对8255 芯片编程来实现输入输出功能。
具体实验步骤如下述:(1)实验接线图如图2-6-3所示,按图连接实验线路图;(2)编写实验程序,经编译、连接无误后装入系统;(3)运行程序,改变拨动开关,同时观察LED 显示,验证程序功能。
南网费控电能表拉合闸控制要求(1708)
南网智能费控电能表拉合闸控制要求一、接线端子要求1、对于采用外置负荷开关的单相费控电能表,端子5输出控制信号,端子6接收反馈信号。
2、对于直接接入式三相费控电能表,端子13输出控制信号,端子15接收反馈信号,端子14不接任何电气部分,进行注塑封堵。
3、对于经互感器接入式三相费控电能表,订货方可根据实际需求进行调整。
二、控制及反馈信号要求1、对于单相费控电能表,控制信号采用交流220V电平方式,内部串联100k Ω电阻后输出。
2、对于三相费控电能表,控制信号采用交流220V电平方式(允许正半波整流),内部串联100kΩ电阻后输出,且应保证在任一相缺相时仍能正常发送控制信号。
3、从电能表供电电源上升至临界电压开始计时,5S内电能表应输出有效控制信号。
4、控制信号要求1)在电能表正常工作电压范围内,若控制信号采取半波整流方式,信号的非激励态输出电压平均值不低于60V,正向峰值电压不低于180V,激励态输出电压平均值小于36V。
2)在电能表正常工作电压范围内,若控制信号采用AC220V电平方式,信号的非激励态输出电压应为电能表供电电压的60%至120%,激励态输出电压应为供电电压的0%至25%。
3)当控制信号处于非激励态时,外置负荷开关闭合,允许用户用电;当控制信号处于激励态时,外置负荷开关断开,中断用户供电。
5、对电能表识别反馈信号的要求电能表应能识别以下所有的反馈信号:1)若反馈信号采取半波整流方式:信号输出电压平均值高于60V,正向峰值电压高于180V时,电能表应识别为非激励态;信号正向峰值电压低于10V,电能表应识别为激励态。
2)若反馈信号采取AC220V 电平方式:信号输出电压有效值高于130V,电能表应识别为非激励态;信号输出电压有效值低于5V,电能表应识别为激励态。
6、以上控制信号和反馈信号均以供电线路的零线(N)作为信号参考点。
三、主动上报及事件记录要求1、电能表收到拉合闸命令时,在执行拉合闸动作时,记录拉/合闸事件记录。
微机原理 第七章中断控制器
CAS2
3
2 . 8259A的编程结构和工作原理
4
编程结构 (1)上半部分:处理部件 中断请求寄存器IRR 中断优先级裁决器PR 当前中断服务寄存器ISR (2)下半部分:7个寄存器 ICW1~ICW4 OCW1~OCW3
5
中断请求寄存器IRR
保存8条外界中断请求信号IR0-IR7的请求状态 Di位为1表示IRi引脚有中断请求;为0表示无请求
1. 中断优先权管理方式: 可见,8259A (1) 全嵌套方式 (2)特殊全嵌套方式 有多中工作方式, (3)自动循环方式 (4)特殊循环方式 使用起来很灵活, 2. 屏蔽中断源的方式 不易掌握,所以介 (1)普通屏蔽方式 (2)特殊屏蔽方式 绍编程之前,先对 3. 中断结束方式 其工作方式分类进 (1) 自动结束(AEOI)方式 行简要的介绍。 (2) 非自动结束(EOI)方式: ① 普通EOI方式;② 特殊EOI方式 4. 系统总线的连接方式(8259A级连方式) (1) 缓冲方式 (2)非缓冲方式 5. 中断请求的引入方式 (1) 边沿触发 (2)电平触发 (3)中断查询
• 优先级特殊循环方式:初始优先级队列是由编程确定的。 也可由操作命令字OCW2来设定。
10
2、屏蔽中断源的方式
• 普通屏蔽方式:8259A的每个中断请求输入端都可以通过 对应屏蔽位的设置被屏蔽,通过设置操作命令字OCW1使 屏蔽器中任一位或几位置1(对中断的屏蔽总是暂时的, eg:计算机网络通信)
5.
6.
16
五、中断响应过程(CPU与8259A的操作过程)
1、申请中断 外设 对应IR0 ~ IR7为“1”, 为“1” CPU的INTR输入“1”,申请中断。 2、响应中断的条件 CLI 使 IF = 0,禁止中断。 STI 使 IF = 1,允许中断。 判优后使INT
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
8255A自身规定其4个片内端口地址A1和A0应为00,01,10和11。
系统总线的A0总为0。将8255A的A1,A0和系统地址总线 的A2,A1分别相连。从而得到四个连续的偶地址。
图 8086与8255A连接
图7.16 采用方式0的查询方式
设8255A的端口地址为:
A端口 380H ; B端口 381H
C端口 382H ; 控制口 383H 具体程序段如下:
PP: MOV AL , 10000001B MOV DX , 383H OUT DX , AL MOV AL , 00001100B OUT DX , AL; 初始化PC6=0 MOV DX , 382H
① CPU输出数据 ② CPU发出WR :
INTE A
PC 6 PC 7
(1) 数据写到 8255A的端口
ACK A
(2) WR 的低电平清除中断请求
OBFA 信号INTR
&
(3) WR 的上升沿使OBF 有效,
O
PC 3
WR
PC 4, PC 5
INTR A
表示输出端口满,通知外设取数 据。
I / O ③ 外设接受到数据后,发出
MOV AL, 01H ; 控制字→AL OUT 203H,AL ; 控制字→控制口
注意:
(1)当端口地址大于255时必须使用间接的输入输出指令。 将端口地址先写入DX中,然后执行输入/输出操作 。
OUT 203H,AL
×
(2)只能用累加器作为输入/输出过程的机构,不能用其他 寄存器代替。
OUT DX ,CL ×
OUT DX,AL ; 控制字→控制端口
CALL DELAY MOV AL, 01H ; 控制字→A
OUT DX,AL ; 控制字→控制端口
2.8255的状态字
当8255的A口、B口工作在方式 1或A口工作在方式 2,通过读C口的数据,可以 检测A口和B 口的状态。
图7.12 A、B口均为方式1输入时的状态字
8086
CPU IOR
IOW
A2 A1
A0
A3
A4
A5
门
电
A9
路
A10
A15 …
D0--D7
RD
PB0
WR A1
…
A0
PB7
8255A
PA0
CS
…
PA7
+5V
… …
PC2
图 无条件传送方式
1、方式 0 2、B口方式 1输入:PC2=STB
7.1.6 8255应用举例
例7.1:现将A口作为传送字符的通道,工作于方式 0,输出方式,B端口未用,端 口C也工作于方式0,PC2 作为BUSY信号的输入端,故PC3~PC0 为输入方式,PC6 作为STROBE 信号输出端,故PC7~PC4 为输出方式,准备传送的字符已在CL 中。
例3:使C 口的第0位PC0 发出负脉冲,控制端口地址为 203H 。
解:置1相应的控制字为:00000001B=01H
1
1
置0相应的控制字为:00000000B=00H
0
MOV DX, 203H;控制端口地址→DX
MOV AL, 01H ; 控制字→AL
OUT DX,AL ; 控制字→控制端口 MOV AL, 00H ; 控制字→A
D7 D6 D5 D4 D3 D2 D1 D0
1
0
0
0
0
0
1
1
标志位
端口A为 定义端口 C口高4 端口B为 定义端口 C口低4 工作方式 0 A为输出 位输出 工作方式0 B为输入 位输入
工作方式控制字为83H
初始化程序:
MOV DX, 63H ; 指向控制口 MOV AL, 83H ;10000011B OUT DX, AL ;8255 初始化 也可以写为: MOV AL, 83H ;10000011B OUT 63H, AL ;8255 初始化
7.1.4 方式控制字及状态字(配电箱/配电盘开关状态)
1.8255的控制字
(1) 方式控制字
方式控制字:10100011 MOV AL , 10100011B MOV DX , 控口地址 OUT DX , AL
图7.10 8255方式控制字格式
例1 使8255A其各口工作于方式0,A口作输出,B口作输入,C 口高4位作输出,C口的低4位作输入。先写出其工作方式控制 字,并写出初始化程序。(控制端口地址为63H)
ACK 信号:
图7.4 端口A方式 1 输出
(1) ACK 的下降沿使OBF 变高,
ACK :外设应答 OBF :输出缓冲器满 INTE :中断允许,
(2) ACK 的上升沿使INTE=1, 则INTR 变高,发出中断请求,请 求CPU 输出新的数据。
1 00 00 0 01
图7.17 采用方式1的查询方式
PP: MOV AL , 10101000B MOV DX , 383H OUT DX , AL
MOV AL , 00001101B; 初始化PC6=1 允许中断
OUT DX,AL; 书上有错!P276
具体输出过程:
PA 7 ~ PA 0
(2) 端口C置位/复位控制字
例如: PC5=1 置位复位控制字:00001011
MOV AL , 00001011B MOV DX , 控口地址 OUT DX , AL
图7.11 8255端口C置位/复位控制字格式
例2:把C 口的第0位PC0 置1,控制端口地址为203H 。
解:相应的控制字为:00000001B=01H MOV DX, 203H;控制口地址→DX MOV AL, 01H ; 控制字→AL OUT DX,AL ; 控制字→控制口
图7.13 A、B口均为方式1输出时的状态字
图7.14 A口在方式2工作时的状态字
7.1.5 8255与CPU的连接 8088
图7.15 计算机中8255的连接
8088:8位数据总线,8255A的A1和A0直接与系统地址总线 的A1和A0相接。
8086:16位数据总线, 低8位数据线 偶地址 高8位数据线 奇地址
LPST :IN AL , DX;测PC2 AND AL , 04H JNZ LPST ;忙,等待
MOV AL , CL
ห้องสมุดไป่ตู้MOV DX , 380H
OUT DX , AL;输出字符
MOV AL , 0DH;=00001101B MOV DX , 383H OUT DX , AL;PC6=1 打印 CALL DELAY DEC AL ;PC6=0 OUT DX , AL;关打印