CRH动车组牵引传动控制及计算第四章 四象限脉冲整流器的工作原理与控制设计
CRH动车组牵引传动控制及计算第四章 四象限脉冲整流器的工作原理与控制设计

四象限脉冲整流器的双闭环控制器设计 正弦脉宽调制技术 (SPWM) 三电平脉冲整流器中性点电压平衡方案
2
脉冲整流器概述 脉冲整流器 概述
Electric Railway Traction AC Drive Systems Electric Railway Traction AC Drive Systems
三电平脉冲整流器的工作模式
工作模式4 (Sa=0,Sb=1):
工作模式 3 (Sa=1,Sb=-1):
u1
u1
Load
Load
Load
u2
is
o
Udc
u2
开关管Ta1,Ta2,Tb3和Tb4导通,Ta3,Ta4,Tb1和Tb2关断。网侧端电压 uao=u1,ubo=-u2,uab=u1+u2。 整流器工作在升压状态,所以直流侧电压比电源电压的幅值大。此 时,加在电感两边的电压为负,因此电流以(us-Udc)/Ls的斜率减小 。正向网侧电流is对电容C1和C2充电。
is
开关管 T2 和 T3 导通,T1 和 T4 关断, 并且 uab=-Udc. 在 这种状态下,电流is增大,反向电流给直流侧电容Cd充 电.
9
开关管 T2 和 T4 导通, T1 和 T3 关断, 并且 uab=0. 电源电 压加在电感两边,使其电流升高。 直流侧电容Cd通过负 载电流放电.
10
三电平整流器的工作原理分析
Electric Railway Traction AC Drive Systems
三电平整流器的工作原理分析
uao =
u1
Sa ( Sa + 1) S ( S − 1) u1 − a a u2 2 2
Байду номын сангаас
列车电力传动与控制第4章牵引变流器电路

牵引变流器
中工作。作为电力牵引用的变流器,相应地能够实现牵引、
制动状态下前进、后退四种工况。
电力机车/EMU交-直-交流传动系统,网侧采用四象限脉 冲整流器,构成交-直部分。负载侧采用三相逆变器,形成
直-交部分。中间环节为支撑电容和二次波滤波环节。
四象限脉冲整流器的突出优点是网侧功率因数高,可达 到1,等效谐波干扰电流小。 两点式脉冲整流器主电路元件可用两个理想开关 SA、SB 等效,其开关函数可表示为
波分量,改善转矩脉动状况并减少损耗。起动完成后,通过
2018/2/12 10
牵引变流器
接触器把它短接。
当列车进行再生制动时,整个系统的工作原理及方式没
有发生什么变化,主电路结构也不发生任何变化。为了使牵 引电动机能够进入发电机状态,控制系统应使异步牵引电动
机工作在负的转差频率下。
在交流传动电力机车发展的初期,为保证电气制动的可 靠性和安全性,还装有制动电阻和转换开关。如果电网不能 接受再生能量或网侧整流器发生故障,应立即在无电流状态 下接入制动电阻。
可以调节从电网输入的电流相位,使所取电流波形接近正弦
波形,并能在广泛的负载范围内,使列车的功率因数接近于 或达到1,电网只提供有功电能,对减小通讯信号的谐波干
2018/2/12 8
C2
Cd
L2
A
B C
图4–1 两点式变流器电路原理图
牵引变流器
扰和充分利用电网的传输功率方面都具有很重要的意义。另 外,四象限变流器能很方便地实现牵引和再生制动之间的能 量转换,能取得显著的节能效果。 四象限脉冲整流器将来自牵引绕组的单相交流电压变换
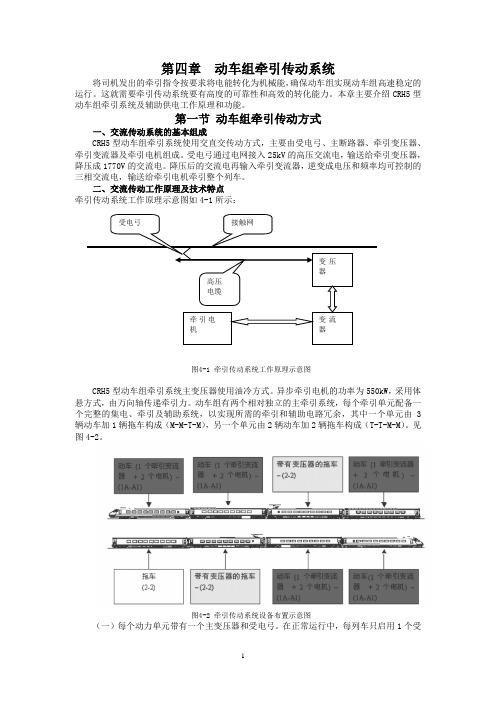
CRH2型动车组牵引传动系统工作原理及控制
CHR2型动车组牵引传动系统工作原理及控制CRH2型动车组牵引传动系统设备配置及工作原理概论牵引传动系统是CRH2型高速动车组的动力来源。
整个系统动力均匀分布于整列动车组的四个基本单元之中,形成了一个完整的组合的动力源。
巨有牵引功率大、启动平稳、快速快捷、有效抑制空转和滑行保护到位等特性,并与多个系统连锁控制,实现运行平稳,多级调速和准确停车。
一、牵引传动系统的组成CRH2型高速动车组以四动四托为编组,其中2,3,6,7号车为动车,1,4,5,8号车是拖车,配备两个牵引系统,首尾两车各设有司机室可双向行驶。
正常情况下两个牵引系统均工作,当某一系统发生故障时可自动切断故障源继续行驶。
CRH2型高速动车组采用动力分散交流传动模式,主要有受电弓,牵引变压器,脉冲整流器,中间环节,牵引变流器,牵引电动机,齿轮传动等组成。
二、牵引传动系统的主要设备配置2.1:车顶设备配置各车辆间的主电路均采用高压电缆和高压电缆连接器连接。
高压电缆连接器分为直线型,5度倾斜型,T型等几种,通过这些高压电缆连接器接通高压电缆。
供电设备配置在4,6号车前部车顶,主要有受电弓和接地保护开关等。
2.2:车底设备配置动车组牵引传动系统车底设备主要有网侧高压电气设备,牵引变压器,牵引变流器,牵引电动机等设备组成。
全列共计2台牵引变压器,4台牵引变流器,16台牵引电动机。
牵引变压器位于2,6号车底,牵引变流器和牵引电动机皆配置在2,3,6,7号车底。
三、动车组牵引传动系统主要设备3.1:受电弓动车组受电弓是从接触网获得电能的主要设备,也是动车组主电路的高压设备之一。
受电弓主要通过列车运行时压缩空气进入升弓装置气囊升起受电弓,使受电弓滑板与接触线接触而获电;绛弓时排出气囊内压缩空气使受电弓落下。
3.2:接地保护开关受电弓和接地保护开关安装在同一车辆上。
接地保护开关通过把特高压电源接地,防止对车体施加特高电压。
当主电路发生电流异常或接触网电压异常等事故时,强制性地操作保护接地开关,把接触网接地,使接地电流流向接触网,变电站供电系统中的隔离开关跳闸,接触网处于无电压状态,以保护动车组不受损坏。
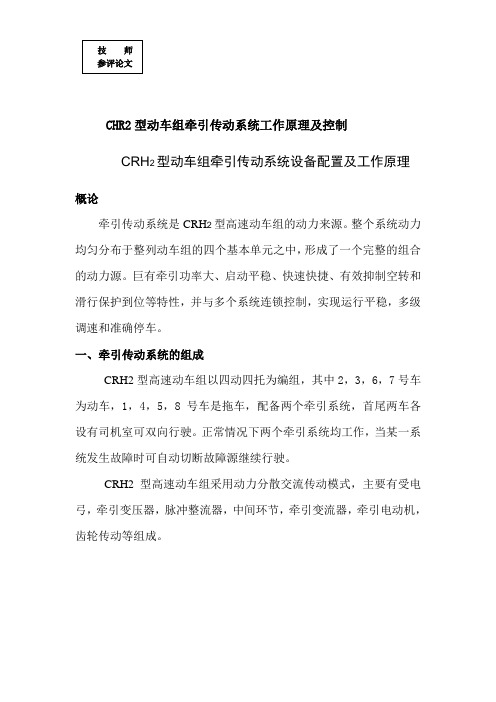
4 CRH3型动车组变流器系统分析
4 CRH3型动车组变流器系统分析4crh3型动车组变流器系统分析4crh3动车组变流器系统分析crh3型动车组牵引变流器结构紧凑,牵引变流器设计成车下牵引箱,易于运用和检修的模块化结构。
牵引变流器输入侧为四象限脉冲整流器(4qc),2个4qc并联为一个共同的直流环节供电,中间电容区部分存储能量,输出平滑的直流电压。
输出端为一个pwm逆变器,将直流环节电压转换成牵引系统所要求的变压变频三相电源驱动4个并联的异步牵引电机。
列车工作在牵引状态时作为逆变器,将直流电转变成电压频率变化的三相交流电供给牵引电动机;列车处于再生制动时牵引电动机作为发电机运行,牵引逆变器工作于整流状态,将三相交流电转变成直流电,再由四相限整流器回馈电网。
4.1牵引变流器主电路结构crh3型动车组牵引变流器采用电压型2电平电路,由脉冲整流器和中间电路组成直流电路、逆变器构成。
变压器牵引绕组ac1550v、50hz交流电输入脉冲整流器。
2电平pwm变频脉冲整流器采用igbt元件,实现输出直流电压2600v~3000v定压控制、牵引变压器原边电压、电流、功率因数的控制,以及无接点控制装置保护。
再生制动时,脉冲整流器接收滤波电容器输出的直流3000v电压,向牵引变压器供应ac1500v、50hz交流电并返回电网。
滤波电容器直流电压输入逆变器,根据igbt控制信号,输出变频变压的三相交流电,对4台并联的牵引电机进行转速、转矩控制。
再生制动时逆变器控制在功能上按正向程序转换,感应电机发出三相交流电,逆变器向滤波电容器输出直流电压。
牵引电机采用直接转矩控制方式,使转矩控制反应高速化,提高了系统动态响应性能。
CRH3动车组由8辆车组成,动力配置为4m+4T(M为动车,t为拖车),其中两辆相邻的动车组为一个基本动力单元。
每个动力装置都有一个独立的牵引传动系统。
受电弓真空断路器牵引变流器牵引电机逆变器滤波电容器脉冲整流器脉冲整流器牵引变流器滤波电容器逆变器牵引电机x4x4牵引变压器图4.1 CRH3动车组牵引传动系统crh3牵引传动系统组成原理图如图4.1所示,在动车组中装有4个完全相同且互相独立的动力单元,每个独立的动力单元都相同,其电路如图4.2所示。
CRH5动车组牵引传动系统
1000A
输入压缩空气
4 到 10bar
静态接触力(阀板上可调)
50–120N
动态接触力调整
风动翼片
4
升弓机构
气囊驱动
80N 接触压力下标称工作气压
3.3–3.8bar
弓头自由度垂向位移
60mm
2.受电弓升降弓系统受电弓的升起功能是由气动系统实现的,压缩空气系统推动受电弓
靠在接触网上,当切断压缩空气的作用时,受电弓在自身重力的作用下降落。为控制受电弓
3
臂间,这种结构使滑板在机车运行方向上移动灵活,而且能够缓冲各方向上的冲击,达到保 护滑板的目的。
对于不同型号和不同速度等级的机车,受电弓的空气动力可以通过安装弓头翼片来进行 调节(如果选装)。自动降弓装置可以监测到滑板的使用情况,如果滑板磨耗到限或受冲击 断裂后,受电弓会迅速自动降下,防止弓网事故进一步扩大。
台电机是由一个独立的牵引逆变器驱动的,在同一车辆内轮对间轮径差最大为 15mm 的情况 下,无需减小负载。每节动车装有两台牵引电机。 正常情况下,两个牵引系统均工作,当一个牵引系统发生故障时,可以自动切断故障源,继 续运行。
(二)图 4-3 为第一牵引单元原理示意图,4-4 为第二牵引单元原理示意图,第二牵引 单元与第一牵引单元及其相似,唯一的区别是仅配备一个辅助变流器(在正常运行条件下, 对于整列车来说仅需要两个辅助变流器,第三个仅作备用,随时替换出现故障的辅助变流 器)。
图4-2 牵引传动系统设备布置示意图
(一)每个动力单元带有一个主变压器和受电弓。在正常运行中,每列车只启用 1 个受
1
电弓。每个牵引动力单元的牵引设备都由下列设备组成: 1.一个高压单元,带受电弓和保护装置; 2.一个主变压器; 3.两套或三套 IGBT 水冷技术的主牵引套件; 4.四台或六台异步牵引电机,底架悬挂,最大设计负载 550kW(轮缘处功率)。由于每
CRH3动车组牵引逆变器设计及其PWM控制算法分析_交通大学毕业设计(论文)

毕业设计(论文)CRH3动车组牵引逆变器设计及其PWM控制算法分析第一章绪论本章作为引言,主要介绍了动车组概念及组成,逆变技术的发展过程及现状,最后简要归纳了本课题的研究任务并对文章安排做了简要介。
1.1 动车组1.1.1 动车组概念及组成“动车组”这个词流行之前,同样的事物也被称做“列车组”、“机车组”等,“动车组”其实是个非常简单的概念。
动车组是按动力分布方式而命名的,其实就是动力分散式列车。
动力集中式列车的牵引力是机头产生,动力集中于一侧。
具有牵引力的动车与无动力的拖车再加上机头,三者组合称为动车的组合,简称动车组。
把动力装置分散安装在每节车厢上,使其既具有牵引动力,又可以载客,这样的客车车辆便叫做动车。
而动车组就是几节自带动力的车辆加几节不带动力的车辆编成一组,就是动车组。
带动力的车辆叫动车,不带动力的车辆叫拖车。
此外有“狭义动车组”一说,英文名为“MU”,全称“Multiple Units”,意为“单元式组合列车”。
“单元”是这种列车中最突出和最核心的概念。
“单元”指若干车辆以特定方式连挂以实现特定功能的编组。
而当这样的编组中一节车也不能再缩减时,称做“最小单元”。
某些情况下,单元内会有可以摘除冗余车辆,但多数情况下单元就是最小单元。
最小单元一旦被拆散,该单元用以实现的功能将消失,或者不再完整。
在比较罕见的情况下,单节车也可以成为单元。
为方便进一步描述,可以按照以下方式划分单元:1. 制动单元。
2. 自走单元。
3. 随走单元。
4. 运营单元。
5. 特殊单元动车组的组成,有多种方式:①由两节或两节以上的动车联挂组成。
②一节动车和一节或数节无动力的附挂车组成,尾部附挂车的末端设有驾驶台。
③两端为动车,中间连接一节或数节无动力的附挂车。
④两端为动车,中间连接多节附挂车,但与动车相邻的附挂车中靠近动车的转向架是驱动转向架,另一动车组列车[1]转向架为无动力的关节式转向架,其他附挂车的转向架均为无动力的关节式转向架。
大功率四象限变流器微机实时控制原理

大功率四象限变流器微机实时控制原理株洲电力机车研究所王挺泽摘要:本文主要介召了大功率四象限变流器微机控制的基本原理及控制方法关键词:四象限变流器、微机控制、原理、方法前言大功率四象限变流器微机实时控制原理是在AC4000原型车四象限变流器控制的基础上进行的。
在此基础上,结合微机控制的优点,又进一步作了的完善,增加了功率因数角控制和具有改善直流电压动态调节性能的直流电流反馈环节。
在控制的硬件上则采用了TMS320C31和80C196双CPU的方案,其中80C196负责:(1)与电网电压的同步控制、(2)充电接触器和短接充电接触器的控制、(3)与有关计算机的通迅、(4)功率因数角的探测、(5)跳弓的检测。
而微处理器DSP320C31则负责:(1)电压、电流的采样、(2)电压、电流调节器的计算、(3)变压器直流磁化控制、(4)功率因数角的控制、(5)调制电压的计算、(6)PWM脉冲计算、(7)PWM脉冲输出控制。
1、四象限变流器主电路工作原理如图1所示为交直交电力机车一个转向架带有两个网侧四象限变流器的主电路图1 四象限变流器的主电路原理图原理图。
为了更好地说明四象限变流器的工作原理,下面对网侧只有一个四象限变流器回路进行分析。
为了简化起见,变压器用一个等效电路表示,变压器的漏抗和内阻用一个电感和一个电阻表示。
原理上四象限变流器的两对桥臂(包括两个GTO和两个二极管)可用转换开关代替。
当网侧四象限变流器在中间回路直流电压U d大于u st峰值下运行时,4qs就作升压调压器工作。
图2为用转换开关代替的网侧四象限变流器等效电路图。
图2 四象限变流器的等效电路原理图4qs是一个脉冲整流器,因此按转换开关的位置,四象限变流器有以下几种工作方式:(1)、u st=0 :电能在电网与变压器漏抗之间交换能量,此时u L=u N,i d0=0(2)、u st=+U d:电能在电网、变压器漏抗与中间回路之间交换能量,此时u L=u N-U d,I d0=I N(3)、u st=-U d:电能在电网、变压器漏抗与中间回路之间交换能量,此时u L=u N+U d,I d0=-I N用脉宽调制产生各开关元件的PWM信号,在变流器输入端形成了基波频率与网频一样的脉宽调制电压。
动车组牵引传动系统的构成与工作原理

动车组牵引传动系统的构成与工作原理动车组牵引传动系统的构成与工作原理1. 引言动车组是现代高速铁路的重要组成部分,而牵引传动系统则是动车组的核心部件。
牵引传动系统能够提供动力,并将其传递到车轮上,使列车得以正常运行。
本文将深入探讨动车组牵引传动系统的构成与工作原理,以便更全面地理解其在高速铁路运输中的重要作用。
2. 构成动车组牵引传动系统由多个关键部件组成,包括牵引逆变器、牵引变压器、牵引电机、传动装置等。
2.1 牵引逆变器牵引逆变器是动车组牵引系统的核心组件之一,它负责将来自供电系统的直流电转换成交流电,为牵引电机提供供电。
牵引逆变器能够根据列车的运行状态和要求来调整输出电压和频率,以实现精确的牵引力控制。
2.2 牵引变压器牵引变压器通常位于牵引逆变器和牵引电机之间,其主要作用是将牵引逆变器输出的交流电转换成适合牵引电机使用的电压。
通过牵引变压器的变换,牵引电机可以得到稳定和可控的电压供应,从而实现牵引力的精确控制。
2.3 牵引电机牵引电机是动车组牵引传动系统的关键部件,负责将电能转换为机械能,驱动车轮的转动。
牵引电机通常采用交流电机,其结构紧凑、效率高,并具有良好的低速和高速特性。
牵引电机的输出扭矩和转速能够根据车速和牵引力需求进行精确的调节。
2.4 传动装置传动装置是将牵引电机的转动传递到车轮上的重要组件,其主要有轴、轴承、减速器等部件组成。
传动装置的设计旨在减小能量损失和噪音产生,并提高动车组的牵引性能和行驶平稳性。
3. 工作原理动车组牵引传动系统的工作原理可以简单地概括为:通过供电系统向牵引逆变器提供直流电源,牵引逆变器将直流电转换成交流电,输出给牵引变压器;牵引变压器将交流电转换成适合牵引电机使用的电压;牵引电机将电能转换为机械能,并通过传动装置将转动传递到车轮上,从而推动列车运行。
具体来说,牵引逆变器能够根据列车的速度以及牵引力需求对输出电压和频率进行调节。
在加速过程中,牵引逆变器提供较高的电压和频率,以提供足够的牵引力;而在减速和制动过程中,牵引逆变器通过降低电压和频率来控制牵引力的减小。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
工作模式6 (Sa=0,Sb=-1):
u1
p ip
u1
C1
1 Ls is us Rs a -1 uab
Sa 0 1 b Sb 0 -1
C1 o io C2 in n
u1
Ls us is
Rs uab
Udc
u2
u2
开关管Ta2,Ta3,Tb2和Tb3导通,Ta1,Ta4,Tb1和Tb4关断 网侧端电压uao=0,ubo=0,uab=0。如果网侧电源电压us>0,则正向网 侧电流is增大,电容C1和C2通过负载电流放电。
1, T1 on,T2 off Sa = 0, T2 on,T1 off
1, T3 on,T4 off Sb = 0, T4 on,T3 off
5
脉冲整流器的数学模型:
dis Ls dt + is Rs = us − ( Sa − S b )U dc C dU dc = ( S − S )i − U dc − i d a b s 2 dt RL L di2 = U − U dc c2 2 dt C2 dU c2 = i2 dt d
u2
u2
开关管Ta3,Ta4,Tb2和Tb3导通,Ta1,Ta2,Tb1和Tb4关断 网侧端电压uao=-u2,ubo=0,uab=-u2。如果反向的电源电压us大于( 或小于)直流侧电压Udc的一半,则网侧电流is减小(或增大);反 向网侧电流对电容C2进行充电,而电容C1通过负载电流放电。
四象限脉冲整流器的双闭环控制器设计 正弦脉宽调制技术 (SPWM) 三电平脉冲整流器中性点电压平衡方案
2
脉冲整流器概述 脉冲整流器 概述
Electric Railway Traction AC Drive Systems Electric Railway Traction AC Drive Systems
Rs uab
i2 Sa L2 b Sb 0 C2 Lo oad 1 Udc Cd
a 0
us
is
开关T1 和T3 导通,T2 和T4 关断,uab=0。如果电源电压 us>0,则网流 is 升高,直流侧电容Cd 将对负载放电.
7
开关 T1 和 T4 导通, T2 和 T3 关断, 并且 uab=Udc. 整流器工作在升压状态,所以直流侧电压比电源电压的 幅值大。此时,加在电感两边的电压为负,因此电流以 (us-Udc)/Ls的斜率减小。电流 is对直流侧电容Cd充电.
C1 o
u1
us
Udc io C2 in n
u2
io
开关管Ta1,Ta2,Tb2和Tb3导通,Ta3,Ta4,Tb1和Tb4关断。 网侧端电压uao=u1,ubo=0,uab=u1。如果正向电源电压us大于(或 小于)直流侧电压Udc的一半,则网侧电流is增大(或减小),网侧 电流is对电容C1进行充电,而电容C2通过负载电流放电。
概述
Electric Railway Traction AC Drive Systems
两电平四象限脉冲整流器的工作原理分析 三电平四象限脉冲整流器的工作原理分析 四象限脉冲整流器的控制概念与对象
创新、自主研发
第四章 四象限脉冲整流器的工作原理与控制设计
主讲人:宋文胜 Email: songwsh@ 西南交通大学电气工程学院 列车控制与牵引传动研究室
工作模式 4 (Sa=0,Sb=0):
i1 1 Ls Rs uab a 0 b 1 Sb C 0 2 Cd Sa i2 L2 Udc
工作模式3 (Sa=0,Sb=1):
i1 1 Ls L Load us is uab Rs a 0 b 1 Sb C 0 2 Cd Sa i2 L2 Udc
Load
us
两电平整流器的工作原理分析
i1 1 Ls us is uab b Rs a 0 1 Sb 0 C2 Cd Sa i2 L2 Udc
uab = ( Sa − S b )U dc
Load
i1 + i2 = ( Sa − S b )is
电路有22 = 4 个开关状态,对应着四种工作模式. Uab的取值有Udc 、0和 -Udc三种电平.
14
开 关 管 Ta1,Ta2,Tb1 和 Tb2 导 通 , Ta3,Ta4,Tb3 和 Tb4 关 断 , 网 侧 端 电 压 uao=u1,ubo=u1,uab=0。如果网侧电源电压us>0,则网侧电流is增大, 电容C1和C2通过负载电流放电。
13
三电平脉冲整流器的工作模式
Electric Railway Traction AC Drive Systems
8
两电平整流器的工作原理分析
Electric Railway Traction AC Drive Systems Electric Railway Traction AC Drive Systems Electric Railway Traction AC Drive Systems
两电平整流器的工作原理分析
三电平脉冲整流器的工作模式
工作模式4 (Sa=0,Sb=1):
工作模式 3 (Sa=1,Sb=-1):
u1
u1
Load
Load
Load
u2
is
o
Udc
u2
开关管Ta1,Ta2,Tb3和Tb4导通,Ta3,Ta4,Tb1和Tb2关断。网侧端电压 uao=u1,ubo=-u2,uab=u1+u2。 整流器工作在升压状态,所以直流侧电压比电源电压的幅值大。此 时,加在电感两边的电压为负,因此电流以(us-Udc)/Ls的斜率减小 。正向网侧电流is对电容C1和C2充电。
15
L Load
开关管Ta2,Ta3,Tb1和Tb2导通,Ta1,Ta4,Tb3和Tb4关断。 网侧端电压uao=0,ubo=u1,uab=-u1。如果反向的电源电压us大于( 或小于)直流侧电压Udc的一半,则网侧电流is减小(或增大),反 向网侧电流对电容C1进行充电,而电容C2通过负载电流放电。
16
L Load
三电平脉冲整流器的工作模式
工作模式5 (Sa=0,Sb=0):
Ta1 Ta2 Tb1 Tb2 a o b Ta3 Ta4 Tb3 C2 Tb4 in n u2 io ip p
三电平脉冲整流器的工作模式
Electric Railway Traction AC Drive Systems
11
12
三电平脉冲整流器的工作模式
Electric Railway Traction AC Drive Systems Electric Railway Traction AC Drive Systems Electric Railway Traction AC Drive Systems
三电平脉冲整流器的工作模式
17
三电平脉冲整流器的工作模式
Electric Railway Traction AC Drive Systems
三电平脉冲整流器的工作模式
工作模式 8(Sa=-1,Sb=0):
u1
工作模式 7(Sa=-1,Sb=1):
u1
Load
Udc
Load
三电平脉冲整流器的工作模式
Electric Railway Traction AC Drive Systems Electric Railway Traction AC Drive Systems Electric Railway Traction AC Drive Systems
整流器的数学模型:
di s 1 S a ( S a + 1) S b ( S b + 1) S a ( S a − 1) S b ( S b − 1) = − − u s − R s is − u1 − u2 dt L 2 2 2 2 s du1 u1 + u 2 1 S a ( S a + 1) − S b ( S b + 1) is − [ ] = C1 RL 2 dt du 2 S ( S − 1) − S b ( S b − 1) u + u2 1 = is − 1 [− a a ] C2 RL 2 dt
开关管Ta2,Ta3,Tb3和Tb4导通,Ta1,Ta4,Tb1和Tb2关断 网侧端电压uao=0,ubo=-u2,uab=u2。如果正向电源电压us大于(或 小于)直流侧电压Udc的一半,则网侧电流is增大(或减小)。正 向的网侧电流对电容C2进行充电,而电容C1因为给输出电路提供 能量而放电。
18
脉冲整流器概述 脉冲整流器 概述
jωs Ls Iɺs
牵引变压器的内阻Rs很小,可 以忽略不计。
jωs Ls Iɺs
ɺ U s Iɺs ɺ U ab
ɺ U ab Iɺs
ɺ U s
Ps (t ) = us (t ) ⋅ is (t ) = 2U s sin ωs t × 2 I s sin ωs t = U s I s − U s I s cos 2ωs t
u2
u2
u2
Sa ( Sa + 1) − Sb ( Sb + 1) is 2 S ( S − 1) − Sb ( Sb − 1) in = a a is 2 ip =
S ( S + 1) S b ( Sb + 1) Sa ( Sa − 1) S b ( Sb − 1) uab = uao − uao = a a − − u1 − u2 2 2 2 2
6
两电平整流器的工作原理分析
Electric Railway Traction AC Drive Systems