信号与系统第5章习题和重点
(完整word版)信号与系统练习题——第5章

信号与系统练习题 第5章一、选择题1、系统函数()H s 与激励信号()f t 之间的关系是(B)A 、反比关系B 、没有关系C 、线性关系D 、不确定2、信号)()(2t e t f t ε-=的单边拉普拉斯变换=)(s F (D ) A 、2)2(1+s B 、 2)2(+s sC 、 2+s sD 、21+s3、已知某系统的框图如下,则此系统的系统函数表示为(C)A 、21()23H s s s =++ B 、2()23s H s s s =++C 、243()23s H s s s +=++ D 、241()23s H s s s +=-+4、已知某LTI 系统的系统函数()H s ,唯一决定该系统的冲激响应()h t 函数形式的是(B )A 、()H s 的零点B 、()H s 的极点C 、系统的激励D 、激励与()H s 的极点 5、2(2)()(1)(2)s s H s s s +=+-,属于其零点的是(C)A 、—1B 、2C 、-2D 、1 6、2(2)()(1)(2)s s H s s s +=+-,属于其极点的是(C )A 、0B 、—2C 、2D 、1 7、已知22()22sF s s s =++,则(0)f +=(C )8、已知2()22F s s s =++,则()f ∞=(A) A 、0 B 、—2 C 、2 D 、不确定 9、信号2(1)()()t f t e t ε--=的单边拉普拉斯变换=)(s F (A )A 、2()2e F s s =+B 、2()2s F s s =+ C 、1()2F s s =+ D 、()2s F s s =+10、信号2(1)()(1)t f t e t ε--=-的单边拉普拉斯变换=)(s F (A )A 、()2s e F s s -=+B 、2()2e F s s =+ C 、1()2F s s =+ D 、()2s F s s =+11、已知信号()cos(2)f t t =的单边拉普拉斯变换2()4s F s s =+,则()[cos(2)]dy t t dt=的单边拉普拉斯变换()Y s =(B )A 、2se s -+ B 、244s -+ C 、224s s + D 、24s s +12、已知信号()cos(2)f t t =的单边拉普拉斯变换2()4s F s s =+,则()[cos(2)()]dy t t t dtε=的单边拉普拉斯变换()Y s =(C )A 、2se s -+ B 、244s -+ C 、224s s + D 、24s s +13、已知信号()f t 的单边拉普拉斯变换为()F s ,则()[()]dy t f t dt=的单边拉普拉斯变换()Y s =(A ) A 、()(0)sF s f -- B 、()(0)sF s f -+ C 、()sF s D 、()F s s14、已知信号()f t 的单边拉普拉斯变换为()F s ,则()[()()]dy t f t t dtε=的单边拉普拉斯变换()Y s =(C )A 、()(0)sF s f --B 、()(0)sF s f -+C 、()sF sD 、()F s s15、已知223()21s F s s s +=++,则(0)f +=(C )A 、0B 、-2C 、2D 、不确定 16、已知223()21s F s s s +=++,则()f ∞=(A )A 、0B 、—2C 、2D 、不确定 17、已知1()1F s s =+,则(0)f +=(C )18、已知()1F s s =+,则()f ∞=(A ) A 、0 B 、—1 C 、3 D 、不确定 19、信号5(1)()t f t e --=的单边拉普拉斯变换=)(s F (A)A 、5()5e F s s =+B 、5()5s F s s =+ C 、1()5F s s =+ D 、()5s F s s =+二、填空题1、某LTI 连续系统的系统函数为235)(2+++=s s s s H ,描述该系统的微分方程为)(5)()(2)(3)(''''t f t f t y t y t y +=++。
第5章作业解答
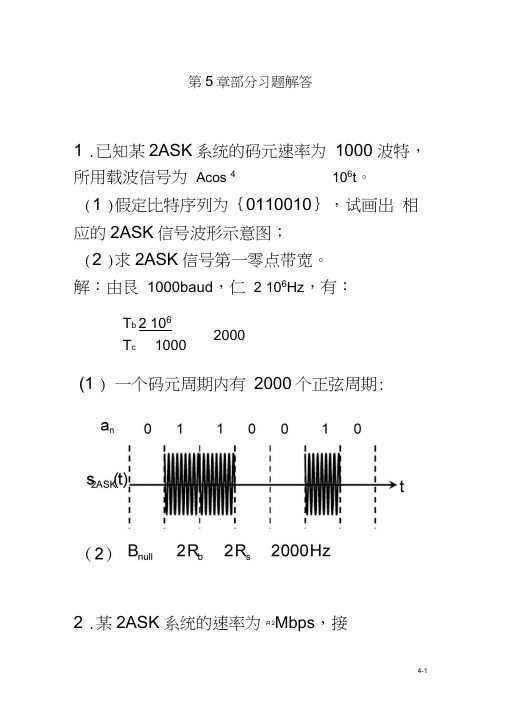
4-1第5章部分习题解答1 .已知某2ASK 系统的码元速率为 1000 波特,所用载波信号为 Acos 4106t 。
(1 )假定比特序列为{0110010},试画出 相应的2ASK 信号波形示意图; (2 )求2ASK 信号第一零点带宽。
解:由艮 1000baud ,仁 2 106Hz ,有:2 .某2ASK 系统的速率为R 2Mbps ,接T b 2 106T c 10002000(1 ) 一个码元周期内有 2000个正弦周期:4-2收机输入信号的振幅 A 40 N , AWGN 信 道的单边功率谱密度为 N o 5 1018W/H Z ,试 求传输信号的带宽与系统的接收误码率。
解:传输信号的(第一零点)带宽为:B T 2% 4MHz平均码元能量: 匚 A 2T bEb 4系统的接收误码率:(1 )若是包络检波,其误码率为(最窄带宽接收):(2)若是相干解调:其误码率为(MF 接收):E b A 2T b A N o4N o 4R b N o40 10 4 2 1065 10 1840E b /N °2401.03 104-33.某2FSK 发送码1时,信号为 Si tAsin wt 1 ,0 t T s ;发送码 o 时信号为 S o t Asin W o t o ,0 t T s 。
式中1及0为均匀分布随机变量,2 1 8 /Ts ,码1与0等概率出现。
(1 )画出包络检波形式的接收机框图; (2)设码元序列为11010,画出接收机中 的主要波形(不考虑噪声);(3 )若接收机输入高斯噪声功率谱密度为N °/2,试给出系统的误码率公式。
解:(1 )由P195图5.2.5可得1.27 1010Q \ 404-4(2)o2 i 8 /T s , f o2f i4/T s , f i2R s 2R由f o f i f i 2R b ,此2FSK 系统的频差足够大,可保证信号正确解调D FSK tr i tww —w -- 「0 t---- WMW y i t / \ J \y o t r\ r\a niii(3)由非相干解调(包络检波)的误码率公式 P199 (5.2.12 ),2A 2/4x---------2, A 2/41 2 P e -e 1I O B BPFe22A2/4A2T ST N g R b14N。
信号与系统课后习题答案第5章
y(k)=[2(-1)k+(k-2)(-2)k]ε(k)
76
第5章 离散信号与系统的时域分析
5.23 求下列差分方程所描述的离散系统的零输入响应、 零状态响应和全响应。
77
第5章 离散信号与系统的时域分析 78
第5章 离散信号与系统的时域分析
确定系统单位响应: 由H(E)极点r=-2, 写出零输入响应表示式: 将初始条件yzi(0)=0代入上式,确定c1=0, 故有yzi(k)=0。
题解图 5.6-1
16
第5章 离散信号与系统的时域分析
题解图 5.6-2
17
第5章 离散信号与系统的时域分析
因此
18
第5章 离散信号与系统的时域分析
5.7 各序列的图形如题图 5.2 所示,求下列卷积和。
题图 5.2
19
第5章 离散信号与系统的时域分析 20
第5章 离散信号与系统的时域分析 21
第5章 离散信号与系统的时域分析 46
第5章 离散信号与系统的时域分析
5.16 已知离散系统的差分方程(或传输算子)如下,试求各 系统的单位响应。
47
第5章 离散信号与系统的时域分析 48
由于
第5章 离散信号与系统的时域分析
49
第5章 离散信号与系统的时域分析
因此系统单位响应为
50
第5章 离散信号与系统的时域分析 51
5.21 已知LTI离散系统的单位响应为
试求: (1) 输入为
时的零状态响应yzs(k); (2) 描述该系统的传输算子H(E)。
69
第5章 离散信号与系统的时域分析
解 (1) 由题意知: 先计算:
70
第5章 离散信号与系统的时域分析
信号与系统郑君里版第五章
二、无失真传输 1、信号失真
(1)幅度失真. 系统对信号中各频率分量幅度产生不同程度的衰减, 使响应各频率分量的相对幅度产生变化, 即引入幅度失真.
(2)相位失真. 系统对信号中各频率分量产生相移不与频率成正比, 使响应各频率分量在时间轴上的相对相对位置产生变化, 即引入相位失真.
求响应
V2 (
j)
gE jw jw
(1
e
jw
)
E(
1 jw
1
)(1 jw
e
jw
)
E 1 (1 e jw ) E (1 e jw )
jw
jw
又Q E (1 e j ) F1 E u(t) u(t )
j
E F1 Eetu(t)
j
u2 (t) Eu(t) u(t ) E etu(t) e(t )u(t )
φ(t)=Kpm(t) 其中Kp是常数。于是,调相信号可表示为
sPM(t)=Acos[ωct+Kpm(t)]
(2)频率调制,是指瞬时频率偏移随调制信号m(t)而
线性变化,即
d(t)
dt
k
f
t
m( )d
其中Kf是一个常数
相位偏移为: 可得调频信号为:
FM和PM非常相似, 如果预先不知道调制信号 m(t)的具体形式,则无法判断已调信号是调相信号 还是调频信号。
如果将调制信号先微分,而后进行调频,则得到的是调相波, 这种方式叫间接调相;
如果将调制信号先积分,而后进行调相, 则得到的是调频 波,这种方式叫间接调频。
信号与系统课后习题答案第5章
yzi(k)=(-2)kε(k)
39
第5章 离散信号与系统的时域分析 40
第5章 离散信号与系统的时域分析 41
第5章 离散信号与系统的时域分析 42
第5章 离散信号与系统的时域分析 43
第5章 离散信号与系统的时域分析
(6) 系统传输算子:
22
第5章 离散信号与系统的时域分析
5.9 已知两序列
试计算f1(k)*f2(k)。
23
解 因为
第5章 离散信号与系统的时域分析
所以
24
第5章 离散信号与系统的时域分析
5.10 已知序列x(k)、y(k)为
试用图解法求g(k)=x(k)*y(k)。
25
第5章 离散信号与系统的时域分析
解 首先画出y(k)和x(k)图形如题解图5.10所示, 然后结合 卷积和的图解机理和常用公式,应用局部范围等效的计算方法 求解。
题解图 5.10
26
第5章 离散信号与系统的时域分析 27
总之有
第5章 离散信号与系统的时域分析
28
第5章 离散信号与系统的时域分析
5.11 下列系统方程中,f(k)和y(k)分别表示系统的输入和输 出,试写出各离散系统的传输算子H(E)。
29
第5章 离散信号与系统的时域分析
解 由系统差分方程写出传输算子H(E)如下:
解 各序列的图形如题解图5.2所示。
题解图 5.2
5
第5章 离散信号与系统的时域分析
5.3 写出题图 5.1 所示各序列的表达式。
题图 5.1
6
第5章 离散信号与系统的时域分析 7
第5章 离散信号与系统的时域分析
《信号与系统》第五章基本内容示例(含答案)
e−4t
sin(0t)
(t)
(2)ℒ
(2t
−
5)
=
1
−5s
e2
s
(3)ℒ-1
1 1− e−s
=
k =0
(t
−
k)
(4)ℒ
cos(3t − 2) (3t − 2) =
s
2
s +
9
−
e
2 3
s
(5)ℒ
e−t (t)
− e−(t −3)
(t
−
3)
=
s
1 (1− +1
e−3s )
(6)ℒ-1
1 2
2. 已知系统的 H (s) = s +1 ,画出系统的零、极点分布图。
(s + 2)2 + 4
六、简单计算下列式子
ℒ 1、
-1
(s
+
0 4)2
+
02
2、ℒ (2t − 5)
ℒ-1
3、
1
1 − e−
s
4、ℒ cos(3t − 2) (3t − 2)
ℒ 5、 e−t (t) − e−(t −3) (t − 3)
系统并联后的复合系统的系统函数为( )。
A . H1(s) + H2 (s)
B . H1(s) H2(s)
C.无法确定
D. H1(s) // H2(s) 14、若 f (t) 1 ,Re[s] −3 ,根据终值定理,原函数 f (t) 的终值为
s+3
( )。
A.无穷小
B.无穷大
C. 1 D. 0
X (s) = F(s) + s X (s) + s2 X (s)
信号系统-第5章 拉普拉斯变换与系统函数
事实上,由于X(s)是一个复平面上 的函数,将其视为一个数学上的变换而 不强调其物理意义更易理解。
利用复变函数理论中的围线积分、留
数定理和约当(Jordon)引理等知识,反 变换表达式(5-11)中原函数x(t)的计算可 简化为如下所示的留数计算。
x(t)
1 2πj
j∞ j∞
X
(s)est ds
因此,反演公式同样适用于单边拉 普拉斯反变换。
5.3 拉普拉斯变换的进一步讨论
5.3.1 定义与说明
式(5-3)已给出了单边拉普拉斯变 换的定义,这里重写于下:
∞
X (s) x(t)estdt 0
图5-2 3个不同的信号具有相同的单边拉普拉斯变换
【例5-5】 求(t)的拉普拉斯变换。
解 取为“0+”时,
1
j∞
X (s)estds
x(t) 2πj j∞
0
t≥0 t0
(5-11)
从物理意义上讲,式(5-11)也可 理解为将x(t)视为形如 et ejt 的幅度随 指数形式增长或衰减的正弦波的线性组 合。
但与傅里叶变换相比,X(s)不能像 X (j) 一样具有明确的物理意义,因此, X(s)在这个正弦波线性组合中的作用难 以得到物理解释。
变收换 敛与 域单 也边相拉同普,拉均斯 为变Re换s相同,,均即为右F半(s)平 s面1(, 包括大半或小半,视 而定)。
【例5-4】 因果信号 f1(t) et (t) 与非因 果信号 f2 (t) et (t) 具有相同的双边 拉普拉斯变换表达式,但收敛域不同。
F1(s)
∞
et (t)estdt
0
0
令 s j ,即 Res , Ims,
第五章练习题
第五章 练习题一、 选择题1、下列开环传递函数所表示的系统,属于最小相位系统的是( )。
(A) ()()12151++-s s s (B) Ts Ts +-11 (T>0)(C) ()()13121+++s s s (D) ()()232-++s s s s【答案】C 【知识点】第五章【解析】该题考查考生什么是最小相位系统。
最小相位系统:若系统传递函数G(s)的所有零点和极点均在s 平面的左半平面,则该系统称为最小相位系统。
所以,答案为C 。
2.对数幅频特性的渐近线如图所示,它对应的传递函数G(s)为( )A. 1+TsB.1 1+TsC. 1TsD. (1+Ts)2【答案】A【知识点】第五章【解析】该题考查考生典型环节的伯德图。
图中为一阶微分环节对数幅频特性的渐近线。
所以,答案为A。
3.图示对应的环节为( )A. TsB.1 1+TsC. 1+TsD. 1 Ts【答案】C【知识点】第五章【解析】该题考查考生典型环节的乃奎斯特图。
图中为一阶微分环节的乃奎斯特图。
所以,答案为C。
4.若系统的Bode图在ω=5处出现转折(如图所示),这说明系统中有( )环节。
A. 5s+1B. (5s+1)2C. 0.2s+1D. 10212(.)s【答案】D【知识点】第五章【解析】该题考查考生由伯德图估计最小相位系统。
由图可以看出转折点为5,并且是由-20dB/dec →-60dB/dec ,所以,必然是在5这个转折点处,出现了两个惯性环节。
因此,答案为D 。
5.已知系统的传递函数G(s)=se Ts K τ-+1,其幅频特性|G(j ω)|应为( )A. K T e 1+-ωτB. K T e 1+-ωτωC. K T e 2221+-ωτωD. K T 122+ω【答案】D【知识点】第五章【解析】该题考查考生频率特性。
题目中的传递函数包括延迟环节,容易迷惑考生。
但延迟环节对系统的幅频特性无影响。
所以,答案为D 。
信号与系统第5章习题答案
第5章连续时间信号的抽样与量化5.1试证明时域抽样定理。
证明:设抽样脉冲序列是一个周期性冲激序列,它可以表示为T(t)(tnT)sn由频域卷积定理得到抽样信号的频谱为:1F s ()F()T 2()1 T snFns式中F()为原信号f(t)的频谱,T ()为单位冲激序列T (t)的频谱。
可知抽样后信 号的频谱()F 由F()以s 为周期进行周期延拓后再与1T s 相乘而得到,这意味着如果 s s2,抽样后的信号f s (t)就包含了信号f(t)的全部信息。
如果s2m ,即抽样m 间隔 1 Tsf2m,则抽样后信号的频谱在相邻的周期内发生混叠,此时不可能无失真地重建 原信号。
因此必须要求满足1 Tsf2 m,f(t)才能由f s (t)完全恢复,这就证明了抽样定理。
5.2确定下列信号的最低抽样频率和奈奎斯特间隔:2t (1)Sa(50t)(2)Sa(100)2t (3)Sa(50t)Sa(100t)(4)(100)(60)SatSa解:抽样的最大间隔 T s 12f 称为奈奎斯特间隔,最低抽样速率f s 2f m 称为奈奎m斯特速率,最低采样频率s 2称为奈奎斯特频率。
m(1)Sa(t[u(50)u(50)],由此知m50rad/s ,则50)5025 f , m由抽样定理得:最低抽样频率50 f s 2f m ,奈奎斯特间隔1 T 。
sf50s2t(2))Sa(100)(1100200脉宽为400,由此可得radsm200/,则100f,由抽样定理得最低抽样频率m200f s2f m,奈奎斯特间隔1T。
sf200s(3)Sa[(50)(50)],该信号频谱的m50rad/s(50t)uu50Sa(100t)[u(100)u(100)],该信号频谱的m100rad/s10050Sa(50t)Sa(100t)信号频谱的m100rad/s,则f,由抽样定理得最低m抽样频率100f s2f m,奈奎斯特间隔1T。
信号与系统第5章
s a n 1 s
n 1
... a 1 s a 0
若m≥n (假分式),可用多项式除法将象函数F(s)分 解为有理多项式P(s)与有理真分式之和。
F (s) P (s)
第5-9页
■
B0 (s) A(s)
©南京信息工程大学滨江学院
信号与系统
F (s) s 8 s 25 s 31 s 15
5.3
拉普拉斯逆变换
直接利用定义式求反变换---复变函数积分,比较困难。 通常的方法 (1)查表:直接利用拉普拉斯逆变换表 (2)利用性质 (3) 部分分式展开 -----结合 若象函数F(s)是s的有理分式,可写为
F (s) bm s
n m
b m 1 s
m 1
.... b1 s b 0
F (s) 1 e
sT
sT
e
2 sT
e
3 sT
+)
特例:T(t) ←→ 1/(1 – e-sT)
第5-5页
■
©南京信息工程大学滨江学院
信号与系统
5.2
拉普拉斯变换性质
四、复频移(s域平移)特性
若f(t) ←→F(s) , Re[s]>0 , 且有复常数sa=a+ja, 则f(t)esat ←→ F(s-sa) , Re[s]>0+a 例1:已知因果信号f(t) 的象函数F(s)=
第5-1页
■
©南京信息工程大学滨江学院
信号与系统
5.1
拉普拉斯变换
四、常见函数的拉普拉斯变换
1、(t) ←→1,> -∞
’(t) ←→s,> -∞
2、(t)或1 ←→1/s ,> 0 3、指数函数e-s0t ←→
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1
f1(k −1)
1
L
3 4 k
0
1
2
f2(k +1)
2
4
L
2
−1 0
1
3
k
信号与系统 · 习题解答
第4页 页
改写为: 改写为:
k<0 0 0 f1 (k − 1) = 0 k = 0 , f 2 (k + 1) = 1 k − 1 k ≥ 1 2 k
y 代入初始条件 yzi (0) = 1, zi (1) = 2 ,yzi (2) = 0 ,有 1 4 A1 + A2 = 1 A2 = − 解得: 解得:A1 = 3 3 A1 + ( A2 + A3 )( −2) = 2 A + (A + 2A ) ⋅ 4 = 0 A3 = 0 2 3 1 4 1 k ≥0 因此 yzi ( k ) = − (−2) k 3 3
∆f (k)
1 23 2 4 2
L
2
−2
−1
−1 0
1
k
信号与系统 · 习题解答
第9页 页
5-6 判断以下序列是否为周期序列,如果是周期序 判断以下序列是否为周期序列, 试确定其周期。 列,试确定其周期。 3 2 (1) f1(k) = Acos( πk + π) − ∞< k < ∞ ) 7 3 k
信号与系统 · 习题解答
第16页 页
(2)y(k + 3) + 3y(k + 2) − 4y(k) = 0 ) ) yzi (0) =1, yzi (1 = 2, yzi (2) = 0,
解: 特征方程为 r 3 + 3r 2 − 4 = 0 ,
特征根为 r1=1,r2=-2,r3 =-2 , - , yzi (k ) = A1 + ( A2 + A3 k )(−2) k 所以
不是周期序列。 所以 f2 (k)不是周期序列。 不是周期序列
j( +πΒιβλιοθήκη ) 8信号与系统 · 习题解答
第10页 页
5-7 序列 f(k)如图所示,把 f(k)表示为 如图所示, 表示为δ(k)的加权与 如图所示 表示为 的加权与 延迟之线性组合。 延迟之线性组合。 f(k) 3
2 −3 −4 −2 −1 0 1 2 3 −2
2 j π 3
,r2 = 2e
2 −j π 3
2 j kπ 3 2 − j kπ 3
yzi ( k ) = A1 ( r1 ) k + A2 ( r2 ) k = 2 k ( A1e 所以
k
+ A2 e
)
2 2 2 2 = 2 ( A1 cos kπ + jA1 sin kπ + A2 cos kπ − jA2 sin kπ ) 3 3 3 3 2 2 k = 2 [( A1 + A2 ) cos kπ + j( A1 − A2 ) sin kπ ] 3 3
0 = −( k +1) + 3( k + 1) 2 0 = −( k +1) + 3( k + 1) 2
k < −1 k ≥ −1 k < −2 k = −2 k ≥ −1
2
0 k < −2 0 = −1 k = −2 − 0 2 −( k +1) + 3( k + 1) k ≥ −1 2 − k + 3k 0 k < −2 = −1 k = −2 − 2 − ( k +1) + 3 k ≥ −1
y ( k + 2) + 3 y ( k + 1) + 2 y ( k ) = x ( k )
对应的冲激响应 h0(k) :
h0 (k ) = A1( −1)k + A2 ( −2)k
k >0
由差分方程知 h0 (1) = 0 所以
− A1 − 2 A2 = 0 A1 + 4 A2 = 1
信号与系统 · 习题解答
第15页 页
*补充题 求下列差分方程所描述的离散时间系统的零 补充题 输入响应 y ) (1) (k + 2) + 3y(k +1) + 2y(k) = 0 yzi (0) = 2, zi (1 =1 ) y ,
解: 特征方程为 r 2 + 3r + 2 = 0
特征根为 r1 = −1 , r2 = −2 所以
f1(k −1)
1
解:
f1 (k − 1) ⋅ f 2 (k + 1) 0 = 0 2 k (k − 1) 0 = k 2 (k − 1) k <0 k =0 k ≥1 k <1 k ≥1
L
3 4 k
0
1
2
f2(k +1)
2
1
4
L
2
−1 0
1
3
k
16
f1(k −1)⋅ f2(k +1)
f (k −2)
3 1 2 6 1 4
解: 2) f (k − 2) ( ) (k
0 k <1 = −( k − 2 ) + 3( k − 2) k ≥ 1 2
1 −1 0 1 2 −1
L
3 4 k
信号与系统 · 习题解答
第7页 页
解: 5) ( )
0 − k − 2 < −1 f ( − k − 2) = − ( − k − 2 ) + 3(− k − 2) − k − 2 ≥ −1 2 0 k > −1 = k +2 2 − 3(k + 2) k ≤ −1
信号与系统 · 习题解答
第12页 页
5-12 试画出下列离散时间系统的模拟图。 试画出下列离散时间系统的模拟图。 (3) y(k + 3) − y(k + 2) + y(k +1 = x(k + 2) + 2x(k) )
解:引入辅助函数q(k),使 引入辅助函数 ,
q(k + 3) − q(k + 2) + q(k + 1) = x(k )
第14页 页
5-14 求解下列差分方程 , , ) (2)y(k +2) +2y(k+) +2y(k) = 0 yzi (0) = 0 yzi (1 =1 )
解:特征方程为 r 2 + 2r + 2 = 0 ,
特征根为
r1, 2 = −1 ± j = 2e
k
3 ±j π 4
,
3 3 所以 yzi (k ) = ( 2 ) c1 cos kπ + c2 sin kπ k ≥ 0 4 4 代入初始条件 yzi (0) = 0 ,yzi (1) = 2 ,有 yzi (0) = c1 = 0 ∴ c1 = 0, c2 = 1 3 yzi (1) = 2c2 sin 4 π = 1 3 k yzi ( k ) = ( 2 ) sin kπ k ≥ 0 因此 4
信号与系统 · 习题解答
第17页 页
y (3)y(k) + 2y(k −1) + 4y(k − 2) = 0,zi (0) = 0 yzi (1 = 2 ) , ) 。 2 解: 特征方程为 r + 2 r + 4 = 0 r2 = −1 − 3 j r1 = −1 + 3 j 特征根为
为了方便求出待定系统, 为了方便求出待定系统,将r1 、r2 写成极坐标形式 r1 = 2e
解: (1) y (k ) = 2 x (k ) + 3
非线性时不变 线性时变
π 2π (2) y (k ) = x(k ) sin k+ 6 7
(3) y (k ) = [x(k )]
2
非线性时不变 线性时不变
( 4) y ( k ) =
n = −∞
∑ x ( n)
k
信号与系统 · 习题解答
k
解: f (k ) = −2δ (k + 3) + 3δ (k − 1) + 2δ (k − 3)
信号与系统 · 习题解答
第11页 页
5-8 试用单位阶跃序列表示图示离散信号。 试用单位阶跃序列表示图示离散信号。 (b) f (k)
2
3
2
1 −2 −1 0
4 5
1 2 3
6
−1
k
解:f 2 (k ) = ε (k + 2) + ε (k ) + ε (k − 2) − 4ε (k − 4) + ε (k − 6)
6 1 4
3
f (−k −2)
1 2
L
1
0 −1
− 4 − 3 − 2 −1
1
k
信号与系统 · 习题解答
第8页 页
解: 6) ∆f (k ) = ( )
f ( k + 1) − f ( k ) k + 1 < −1 0 − −k k + 1 ≥ −1 2 + 3k k < −2 0 − −k k ≥ −2 2 + 3k k < −1 k ≥ −1
4
L
−1 0 1
2
3
k
信号与系统 · 习题解答