控制系统的传递函数
第二章 控制系统的传递函数

第二章
控制系统的传递函数
2.1 微分方程模型(时间域模型)
一、控制系统微分方程的分类
线性系统:可由线性微分方程描述的系统。线性微分方程是指微分方程 是定常和线性的。线性系统可应用叠加原理,将多输入及多输出的 系统转化为单输入和单输出的系统进行处理分析,最后进行叠加。 另外线性系统还有一个重要的性质,就是齐次性,即当输入量的数 值成比例增加时,输出量的数值也成比例增加,而且输出量的变化 规律只与系统的结构、参数及输入量的变化规律有关,与输入量数 值的大小是无关的。 非线性系统:研究非线性系统的运动规律和分析方法的一个分支学科。 非线性系统最重要的问题之一就是确定模型的结构,如果对系统的 运动有足够的知识,则可以按照系统运动规律给出它的数据模型。 一般来说,这样的模型是由非线性微分方程和非线性差分方程给出 的,对这类模型的辨别可以采用线性化,展开成特殊函数等方法。 非线性系统理论的研究对象是非线性现象,它反映出非线性系统运 动本质的一类现象,不能采用线性系统的理论来解释,主要原因是 非线性现象有频率对振幅的依赖性、多值响应和跳跃谐振、分谐波 振荡、自激振荡、频率插足、异步抑制、分岔和混沌等。
控制系统的传递函数
例 2:RLC 电路(L-R-C 无源四端网络)如图,建立输入输出间的微分方程关
由基尔霍夫定律,回路的压降为 0,即输入电压由电感、电阻、电容上的电压 平衡。 Ur=UL+UR+UC 电流 与 有 即 的关系
第二章
控制系统的传递函数
与 在数值上具有一 ~
注意:该系统也是一个二阶系统 与例 1 相比,它们具有相同的模型形式。当
线性系统满足叠加原理,而非线性系统不满足叠加原理。
第二章
控制系统的传递函数
二、微分方程模型的建立 根据系统物理机理建立系统微分方程模型的基本步骤: (1)确定系统中各元件的输入、输出物理量; (2)根据物理定律或化学定律(机理),列出元件的原始方程,在条 件允许的情况下忽略次要因素,适当简化; (3)列出原始方程中中间变量与其他因素的关系; (4)消去中间变量,按模型要求整理出最后形式。
《自动控制原理》MATLAB中的传递函数模型实验
《自动控制原理》MATLAB中的传递函数模型实验一、实验目的1、熟练运用matlab软件,求解控制系统数学模型2、掌握传递函数在matlab中的表达方法3、掌握matlab求解拉氏变换和反变换4、掌握matlab求系统极值点和零点判断系统稳定性二、实验仪器Matlab2014b版三、实验原理(一)MATLAB中的传递函数模型传递函数在matlab中的表达方法控制系统的传递函数模型为:在MATLAB中,分子/分母多项式通过其系数行向量表示,即:num = [b0 b1 … bm]den = [a0 a1 … an]此时,系统的传递函数模型用tf函数生成,句法为:sys=tf(num, den) 其中,sys为系统传递函数。
如:num = [1 5 0 2]; den = [2 3 15 8];则:sys=tf(num, den)输出为:Transfer function:若控制系统的模型形式为零极点增益形式:此时,系统的传递函数模型用zpk函数生成,句法为:sys=zpk(z, p, k)。
zpk函数也可用于将传递函数模型转换为零极点增益形式,句法为:zpksys=zpk(sys)如:z=[-0.5 -1 -3]; p=[1 -2 -1.5 -5]; k=10;sys=zpk(z, p, k)传递函数的转换[num,den]=zp2tf(z,p,k)[z,p,k]=tf2zp(num,den)实际系统往往由多个环节通过串联、并联及反馈方式互连构成。
MATLAB提供的三个用于计算串联、并联及反馈连接形成的新系统模型的函数。
series函数计算两子系统串联后的新系统模型。
句法:sys = series(sys1, sys2)sys1, sys2分别为两子系统模型parallel函数计算两子系统并联后的新系统模型。
句法: sys = parallel(sys1, sys2)feedback函数计算两子系统反馈互联后的新系统模型。
控制系统的传递函数定义
控制系统的传递函数定义
控制系统传递函数是描述控制系统输入与输出关系的数学模型,通常用于分析和设计控制系统。
它表示了输入信号经过控制系统后的输出信号,可以用数学公式表示为输出信号Y(s)与输入信号U(s)的关系:Y(s)=G(s)U(s)。
其中,G(s)为系统的传递函数,它是一个复数函数,描述了控制系统的动态特性和稳态特性。
传递函数的分母描述了系统的阻尼和自然频率,分子描述了系统的增益和相位,通过对传递函数进行分析可以得到系统的稳态误差、稳定性、响应速度等性能指标。
因此,传递函数是控制系统分析和设计的重要工具,对于掌握控制系统的动态特性和优化系统性能具有重要意义。
- 1 -。
控制系统的传递函数及信号流图和梅逊公式
1 Ln LrLsLt
《自动控制理论》
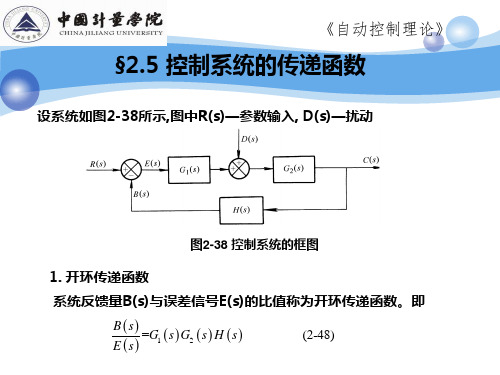
§2.6 信号流图和梅逊公式的应用
《自动控制理论》
§2.6 信号流图和梅逊公式的应用
例2-7 试用梅逊公式求系统的闭环传递函数 C(S)
R(S)
图2-45 例2-7图
《自动控制理论》
§2.6 信号流图和梅逊公式的应用
解: P1 G1G2G3.
路 开通路—通路与任一节点相交不多于一次
《自动控制理论》
§2.6 信号流图和梅逊公式的应用
闭通路—通路的终点也是通路的起点,并且与任何其它节 点相交不多于一次
6)前向通路—从输入节点到输出节点的通路上,通过任何节 点不多于一次,此通路自然保护区为前向通路
7)回路—就是闭环通路 8)不接触回路—如果一些回路间没有任何公共节点 9)前向通路增益—在前向通路中多支路增益的乘积。 10)回路增益—回路中多支路增益的乘积。
《自动控制理论》
§2.6 信号流图和梅逊公式的应用
信号流图的性质 (1)信号流图只适用于线性系统。 (2)支路表示一个信号对另一个信号的函数关系;信 号只能沿着支路上的箭头指向传递 (3)在节点上可以把所有输入支路的信号叠加,并把 相加后的信号传送到所有的输出支路。
(4)具有输入和输出支路的混合节点,通过增加一个具 有单位增益的支路,可以把它作为输出节点来处理。 (5)对于一个给定的系统,其信号流图不是唯一的, 这是由于描述的方程可以表示为不同的形式。
参考输入误差的传递函数为
CR(s) ER(s)G1(s)G2(s)
CR(s)
G1( s )G 2( s )
R(s) 1 G1(s)G2(s)H (s)
ER(s)G1(s)G2(s)
控制工程基础:第二章 控制系统的数学模型及传递函数
用线性微分方程描述的系统,称为线性系统。 如果方程的系数为常数,则称为线性定常系统; 如果方程的系数不是常数,而是时间的函数,则称为线性时 变系统。
线性系统的重要性质是可以应用叠加原理:
(1)多个输入同时作用于线性系统的总响应,等于各个输入 单独作用时分别产生的响应之和,且输入增大若干倍时,其输出 亦增大同样的倍数。
一、 拉氏变换的定义
§2.2 拉普拉斯积分变换
1. 拉氏变换的定义
如果有一个以时间t为自变量的实函数f (t),
它的定义域是t 0,那么函数f (t)的拉氏变换为:
L[ f (t)] F (s) f (t)est dt 0
复变量:s j
原函数: f (t) 象函数: F (s)
F(s) L[ f (t)]
(6)式即为二阶常系数线性微分方程。
四、小结:
§2.1系统运动微分方程的建立
(1)物理本质不同的系统,可以有相同形式的数学模型。
机械平移动力学系统:
d2 m dt2
xo
(t
)
B
d dt
xo (t) kxo (t)
fi (t)
电网络系统:
LC
d2 dt 2
uo
(t)
RC
d dt
uo
(t)
uo
(t)
L[Ax1(t) Bx2 (t)] AX1(s) BX 2 (s)
2. 微分定理和积分定理
(1)微分定理
在所有初始条件均 为零时
L[ df (t)] sF (s) dt
L[ f (t)] F(s)
L[ df (t)] sF (s) f (0) dt
L[ d 2 f (t)] s 2 F (s) sf (0) f (0) dt 2
第四章控制系统的传递函数

其中,
n
1 T
——环节的 固有频率
To 2
1 T
——环节的 阻尼比
如果0≤ξ<1,二阶环节称为振荡环节
例7 图示是由质量m、阻尼c、弹簧k组成的动力系统. 求G(s)
依动力平衡原理有 Xi(t) k m c
Xo(t)
d 2 xo dxo m 2 c kxo kxi dt dt
因此,系统的传递函数就是系统单位脉冲响应 的拉氏变换。
一般地,传递函数的表达式为
X o ( s) ao s n a1s n1 a2 s n2 an G( s ) X i ( s) bo s m b1s m1 b2 s m2 bm
2. 传递函数的性质
k
k为比例环节的增益或称为放大系数
例1
解
ni(t)
z1
求一对齿轮传动的传递函数 no z1 k ∴G(s)=k ni z2
最基本的运算放大器
no(t)
z2
例2
i 1= i 2
ei ea ea eo R1 R2
ei eo R1 R2
ei
R2 R1 e i2 a Ko a i3 i1 +
ZL=Ls
3.电容元件
dUC iC C dt
ZC(s) = 1/sC
例5
下图是一个由运算放大器组成的积分器, 求G(s)。 C R i + uc 取拉氏变换 uo Ui(s) R
Zc
i
+ Uo(s)
ui
解:
1 uc idt c
I ( s) U c ( s) cs
K s
1 Zc cs
ms2 X o ( s) csX o (s) kXo ( s) kXi (sG( s) 2 ms cs k
控制系统的传递函数
表示成零点、极点形式:
m
G(s)
Y (s) X (s)
bm an
Q(s) P(s)
Kg
(s zi )
i 1 n
(s pj )
z 式中: 称为传递函数的零点, i
j 1
称为传递函p数j 的极点。
Kg
bm an
Tuesday, June 16, 2020
—传递系数(零极点形式传递函数增益)
9
传递函数的表现形式
零初始条件下输出量的拉氏变换与输入量拉氏变换之比。也可写成:Y(s)=G(s) X(s)。
通过拉氏反变换可求出时域表达式y(t)。
Tuesday, June 16, 2020
2
传递函数的基本概念
[总结]: 传递函数是由线性微分方程(线性系统)当初始值为零时进行拉氏变化得到
的。
已知传递函数G(s)和输入函数X(s),可得出输出Y(s)。通过反变换可求出 时域表达式y(t)。
Gm (s)M k f (t), G f
c (s) Gu (s) (s) U f (s)
(s)
Gm kf
(s)
U g (s) Mc (s)
5
传递函数的基本概念||例2-8a8'
求下图系统的传递函数。
R
L
方法1:见例2-1
求L上C式uo的'' (拉t)氏变R换C,uo得' (:t) uo (t) ui (t)
Tuesday, June 16, 2020
4
传递函数的基本概念||例2-8
上式有两个输入量,而传递函数只能处理单输入-单输出系统。对于线性系统, 可以将多个输入分别独立处理,然后叠加起来。下面分别讨论两个输入单独作用时 的传递函数。
自动控制原理传递函数
自动控制原理传递函数自动控制原理中,传递函数是一个非常重要的概念。
传递函数可以描述控制系统的输入和输出之间的关系,通过传递函数,我们可以分析系统的动态特性,设计控制器,进行系统仿真和性能评估。
因此,了解和掌握传递函数的概念和应用是非常重要的。
首先,让我们来了解一下传递函数的定义。
传递函数是指控制系统的输出响应与输入信号之间的函数关系,通常用G(s)表示。
其中,s是复变量,表示系统的复频域变量。
传递函数可以是一个分式函数,也可以是一个多项式函数。
通过传递函数,我们可以方便地分析系统的频域特性和时域特性。
接下来,我们来看一下传递函数的应用。
在控制系统设计中,我们经常需要根据系统的要求设计控制器,使得系统的性能指标满足要求。
而传递函数可以帮助我们分析系统的稳定性、超调量、静态误差等性能指标,从而指导我们设计出合适的控制器。
此外,传递函数也可以用于系统的仿真和性能评估,通过对传递函数进行频域分析和时域分析,我们可以了解系统的动态特性,评估系统的性能,找出系统存在的问题并进行改进。
在实际工程中,我们经常会遇到各种各样的控制系统,比如电机控制系统、飞行器控制系统、机器人控制系统等。
而这些控制系统的动态特性往往是非常复杂的,需要通过传递函数进行分析和设计。
因此,掌握传递函数的应用是非常重要的。
最后,让我们来总结一下传递函数的重要性。
传递函数是描述控制系统输入和输出之间关系的重要工具,通过传递函数,我们可以分析系统的动态特性,设计控制器,进行系统仿真和性能评估。
在实际工程中,掌握传递函数的应用是非常重要的,可以帮助我们设计出性能优良的控制系统。
综上所述,传递函数在自动控制原理中具有非常重要的地位和作用。
通过对传递函数的理解和应用,我们可以更好地理解和设计控制系统,提高系统的性能和稳定性。
希望本文能够帮助读者更好地理解传递函数的概念和应用,提高对自动控制原理的理解和应用能力。
控制工程基础第三章系统的传递函数
如图所示为机械转动系统,由惯性负载和粘性摩擦阻 尼器构成,以转矩Ti为输入量,以角速度w为输出量
机械转动系统
dw ( t) 其运动方程式为:J + Bw ( t )= Ti ( t) dt W (s ) 1 K 其传递函数为:G ( s)= = = Ti (s ) Js + B Ts + 1 J 1 式中 T= , K = 。 B B
B
i(t)
C
uo (t)
x
机械平移系统
d 2x dx m 2 B k x f t dt dt
RLC电路
X s 1 1 2n Gs = 2 F s ms Bs k k s 2 2n s 2 n
n
k m
B 2 km
C
uo (t )
其微分方程为:Ri( t)+ u0 () t = ui () t du0 () t i( t)= C dt 消去中间变量后,得 du0 () t RC + u0 () t = ui () t dt 通过拉氏变换求得电路的传递函数为: U0 (s) 1 G( s)= = Ui (s) Ts+1 式中 T=RC
4. 微分环节
输出量与输入量的微分成比例的环节,称为微分环节 dxi ( t) 其运动方程式为:x0 ( t )= TD dt 其传递函数为: G ( s)= TD s
式中 TD ─ 微分环节的时 间常数 。
当输入量为单位阶跃信号时,输出量就是脉冲函数,这 在实际中是不可能的。因此,理想的微分环节不能实现,在 实际中用来执行微分作用的都是近似的,称为实际微分环节, 其传递函数具有如下形式:
一阶微分环节和二阶微分环节的微分方程分别为:
自动控制理论传递函数
(is 1)
(
2 k
s2
2
k
k
s
1)
k 1
n2
(Tj s 1) (Tl2s2 2 lTl 1)
j 1
l 1
振荡环节
式中: m1 2m2 m, n1 2n2 n
从上式可以看出:传递函数是一些基本因子的乘积。这些
基本因子就是典型环节所对应的传递函数,是一些最简单、最
基本的一些形式。
2020年4月18日
[解]各环节的微分方程和传递函数分别为:
运放Ⅰ:
u1(t)
k1ue
(t),
G1(s)
U1(s) U e (s)
k1
运放Ⅱ: u2 (t) k2[u1(t) u1(t)], G2 (s)
U 2 (s) U1(s)
k2 (s
1)
功放:
ua
(t)
k3u2 (t),
G3 (s)
Ua (s) U 2 (s)
y (t )
k
(1
e
t T
)
,式中:k为放大系数,T为时间常数。
当k=1时,输入为单位阶跃函数时,时域响应曲线和零极点分
布图如下:y(t) 1
原点处斜率为1/T
0.8
j S平面
0.6
0.632
0.4 0.2
1 T
0
Re
0
t
T
通过原点的 斜率为1/T。只有一个极点(-1/T)。
2020年4月18日
17
R
1 Cs
1 Cs
ui (s) RCs 1
2020年4月18日
19
振荡环节
(四)振荡环节:
时域方程:a2 y'' (t) a1 y' (t) a0 y(t) b0 x(t)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
例1:单自由度机械位移系统(如插床、刨床)如图, 建立 ~ 间的微分方程关系式。
分析: 输入: 力 输出: m的位移
第二章 控制系统的传递函数
质量-弹簧-阻尼器系统
(1)对于 m,由牛顿定律
m的受力分析
,质点所受的合力与惯性力相等。有
(2)弹簧力
-弹簧系数
与位移成正比
第二章 控制系统的传递函数
阻尼器力
第二章 控制系统的传递函数
3、同一控制系统可以有不同的数学模型 同一控制系统具有各种物质运动形式(机械传动、电磁量运动、热
变形等),而不同的物质运动形式又分别受不同的物理规律约束,因而 建立的数学模型可能不同。 因此,建立数学模型时,一定要搞清输入 量、输出量。
四、数学模型的分类
1、微分方程 时间域 t
一方面,数学自身的理论是严密精确和较完善的,在工程问题 的分析和设计中总是希望借助于这些成熟的理论。事实上凡是与数 学关系密切的学科发展也是快的,因为它有严谨和完整的理论支持 ;另一方面,数学本身也只有给它提供实际应用的场合,它才具有 生命力。“1”本身是没有意义的,只有给它赋予了单位(物理单位 ) 才有意义。
-阻尼系数
与位移的变化量成正比
由上面两式有
整理得
注意: 习惯上将系统(元件)的输出及输出的各阶导数放在等式的
左边,输入及输入的各阶导数放在等式的右边; 由于系统总是存在着储能元件,一般地,等式左边的阶次高
于右边的阶次; 上式中左边输出的最高阶次为二,称该系统为二阶系统。
第二章 控制系统的传递函数
例 2:RLC 电路(L-R-C 无源四端网络)如图,建立输入输出间的微分方程关 系式。
析研究,称为模拟,这种方法称为功能模拟法。
说明:一般由于机械系统比较复杂,参数调整不方便,在很多情况下,采用电模拟的 方法,对系统分析,特别是在现在,电气、电子技术的发展,为电模拟提供了良好的 条件。在专用模拟机或通用模拟机上,采用数学模型相似的电网络代替要研究的系统 来进行计算和研究,方便,易行。
由基尔霍夫定律,回路的压降为 0,即输入电压由电感、电阻、电容上的电压 平衡。
Ur=UL+UR+UC 即 电流 与 的关系 有
第二章 控制系统的传递函数
注意:该系统也是一个二阶系统 与例 1 相比,它们具有相同的模型形式。当 与 在数值上具有一 定关系时,上述二个微分方程具有完全相同的形式。也就是说,在数学上 ~ , ~ 具有相同的关系(静、动态关系),由此可见利用数学模型 研究控制系统的重要性、方便性。另外,用电气系统模拟机械系统进行实验 研究也是工程中的常用方法,就系统理论而言,可以撇开系统的具体属性进 行普遍意义的分析和研究。
第二章 控制系统的传递函数
本章重点:1 掌握控制系统建立数学模型的方法 2 应用拉普拉斯变换求解微分方程
2.0 概述 主要解决的问题:
1 什么是数学模型 2 为什么要建立系统的数学模型 3 对系统数学模型的基本要求
第二章 控制系统的传递函数
2.0 概述 一、数学模型的定义 1、 控制系统的数学模型是描述系统或环节内部、外部各物理量(或
建立系统数学模型的方法很多,主要有两类: 机理建模 (白箱-系统的各元件及参数已知,结构已知); 实验建模(数据建模,系统辨识) (黑箱-结构全不知道或灰箱-知 道一部分)。
第二章 控制系统的传递函数
二、建立数学模型的依据
通过系统本身的物理特性来建立。
如力学三大定律、流体力学定律、电学定律、欧姆定律、克希霍夫定律等
单输入 单输出
2、传递函数 复数域 s=σ+iω - - -
3、频率特性 频率域 ω
---
4、状态方程 时间域 t
多输入 多输出 用一组微分方程描
述系统的状态特性
第二章 控制系统的传递函数
2.1 微分方程模型(时间域模型)
一、控制系统微分方程的分类
线性系统:可由线性微分方程描述的系统。线性微分方程是指微分方程 是定常和线性的。线性系统可应用叠加原理,将多输入及多输出的 系统转化为单输入和单输出的系统进行处理分析,最后进行叠加。 另外线性系统还有一个重要的性质,就是齐次性,即当输入量的数 值成比例增加时,输出量的数值也成比例增加,而且输出量的变化 规律只与系统三、数学模型的特点
1、实物→(抽象)数学表达式 2、不同的控制系统可以具有相同的数学模型
即可用同一个数学模型去描述不同的系统,如,单摆在平衡位置附近 的自由运动 电阻、电容、电感电路中电容的放电过程 都是衰减振荡 。
相似系统:控制系统中具有相同的数学模型的系统。
应用: 模拟:两相似系统,通过分析一个系统而达到对另外系统分
关系:静态模型是t时系统的动态模型。
控制系统的数学模型可以有多种形式,建立系统数学模型的方法 可以不同,不同的模型形式适用于不同的分析方法。
第二章 控制系统的传递函数
2、为什么要建立控制系统的数学模型 控制系统的数学模型是由具体的物理问题、工程问题从定性的
认识上升到定量的精确认识的关键!(这一点非常重要,数学的意 义就在于此)
变量)之间动、静态关系的数学表达式或图形表达式或数字表达 式。亦:描述系统性能的数学表达式(或数字、图像表达式)。 控制系统的数学模型按系统运动特性分为:静态模型 动态模型 静态模型:在稳态时(系统达到平衡状态)描述系统各变量间关系 的数学模型。 动态模型:在动态过程中描述系统各变量间关系的数学模型。
第二章 控制系统的传递函数
二、微分方程模型的建立 根据系统物理机理建立系统微分方程模型的基本步骤: (1)确定系统中各元件的输入、输出物理量; (2)根据物理定律或化学定律(机理),列出元件的原始方程,在条 件允许的情况下忽略次要因素,适当简化; (3)列出原始方程中中间变量与其他因素的关系; (4)消去中间变量,按模型要求整理出最后形式。