基于CCD传感器的点光源动态跟踪系统
目标跟踪系统

目标跟踪系统目标跟踪系统(Object Tracking System)是一种能够自动检测、追踪和跟踪运动目标的计算机系统。
目标跟踪系统由一个或多个传感器,例如摄像机或雷达,一个目标检测算法和一个目标跟踪算法组成。
它广泛应用于许多领域,包括视频监控、智能交通系统和无人驾驶车辆。
目标跟踪系统的核心任务是从传感器获取的输入数据中提取目标并预测它们的运动轨迹。
目标检测算法通常使用计算机视觉技术,例如模板匹配、颜色分割和特征提取,来检测输入图像中的目标。
一旦目标被检测到,目标跟踪算法将对目标进行跟踪,通过连续观察目标在每一帧中的位置,速度和加速度等信息,预测目标的未来位置。
目标跟踪系统的性能取决于目标检测和目标跟踪算法的准确性和效率。
现代目标检测算法通常基于深度学习技术,例如卷积神经网络(CNN),能够在复杂背景和遮挡的情况下准确地检测目标。
目标跟踪算法则使用过滤器或轨迹预测方法,例如卡尔曼滤波器或粒子滤波器,来估计目标的状态并跟踪目标。
目标跟踪系统还可以通过使用多个传感器来提高跟踪性能。
多传感器融合技术可以结合不同传感器的信息,例如摄像机和雷达,来提供更准确和鲁棒的目标跟踪结果。
例如,摄像机可以提供目标的外观信息,而雷达可以提供目标的位置和速度信息。
通过融合两种传感器的信息,可以更好地跟踪目标,避免诸如光照变化和遮挡等困难。
随着计算机硬件和计算能力的提高,目标跟踪系统已经取得了显著的进展。
现代目标跟踪系统不仅能够准确地跟踪单个目标,还能够同时跟踪多个目标,并进行目标重识别和目标分类等复杂任务。
这些进展为实现自动驾驶车辆、智能交通系统和智能安防系统等应用奠定了基础。
综上所述,目标跟踪系统是一种能够自动检测、追踪和跟踪运动目标的计算机系统。
它利用传感器和算法来提取目标并预测它们的运动轨迹,广泛应用于视频监控、智能交通系统和无人驾驶车辆等领域。
随着技术的不断发展,目标跟踪系统将继续迎来更多的创新和应用。
基于CCD场输出模式下成像系统设计
技术创新摘要:采用SONY 行间转移型面阵CCD ICX415AL 作为传感器件,设计了一种新型的CCD 成像系统,成像系统采用CCD 信号专用芯片CXA1310AQ 进行信号处理。
使输出信号满足模拟信号PAL/CCIR 标准,可以采用电视机或者配有视频卡的计算机作为显示终端。
在介绍CCD ICX415AL 的结构和特点的基础上,完成了时序电路和驱动电路的设计,CCD 工作模式为场输出模式,可以理解为垂直方向的binning 技术,并采用相关双采样(CDS)技术滤除了视频信号中的相关噪声,提高了系统的信噪比,整个系统采用现场可编辑门阵列作为核心器件,通过自上而下的模块设计。
完成了CCD 驱动时序,数据采集时序控制和视频信号简单处理。
关键词:行间转移CCD;驱动时序;相关双采样;FPGA 中图分类号:TN386.5文献标识码:AAbstract:A new imaging system is design by using an interline transfer CCD ICX415AL as sensor which is produced by SNOY cor -poration .and greatly improve the SNR of system .CCD imaging system uses special signal processing chip-CXA1310AQ making out -put signal to meet the standard of PAL/CCIR .so It can be used with TV and computer which has video card as a display terminalOn the basis of introducing the structure and characteristics of CCD ICX415AL ,The circuits of timing sequence and driver for sen -sor are design ,CCD work in field readout mode which can be realize as binning-technology in vertical direction and the noises of video signal are filtered by Correlated Double Sampling (CDS),the signal -to -noise ratio of system is enhanced .The system is take Field Programmable Gate Array (FPGA)as the key device .the CCD driving clock ,Clock control of data Acquisition and Video signal process are accomplished by the module design method of from top to bottom .Key words:interline transfer CCD;driving clock Correlate Double Sample (CDS );Field Programmable Gate Array (FPGA)1引言CCD(Charge Coupled Devices)技术经过三十年的发展已成为一种成熟的光电成像技术,由于CCD 具有信号输出噪声低,动态范围大,量子效率高以及电荷转移效率高等优点,采用硅衬底的ICCD ,光谱响应范围为0.3um~1.1um ,超过可见光范围可以延伸到紫外,x 射线。
ccd检测原理

ccd检测原理
CCD(Charged Coupled Device)检测原理是基于光电效应和集成电路技术的,它利用了CCD芯片上成千上万个微小感光单元(photosite)对光信号的敏感性。
CCD检测原理的具体步骤如下:
1. 入射光线进入CCD芯片中,通过透镜或光纤等途径对待测物进行照射。
2. 入射光线经过透镜或光纤后,会在CCD芯片上的感光单元上产生光电子。
3. 光电子在感光单元中被电场集成,并被移动至CCD芯片的储存区域。
4. 在储存区域中,光电子被逐渐移动至读出区域,其中的电荷量与感光单元所接收到的光的强度成正比。
5. 在读出区域中,CCD芯片的增益被放大,将电荷转换为电压信号。
6. 最后,电压信号被传输至相应的电路,进一步进行信号处理和分析。
通过以上步骤,CCD检测原理能够将光信号转化为电信号,
实现对光强度或光谱的测量和分析。
它在图像采集、光谱测量、静态和动态光学测量等领域有着广泛的应用。
基于PLC的二维极轴太阳光自动追踪系统的设计
郑 晓斌 林 立 生 ( 福建船政交 7 )
摘 要
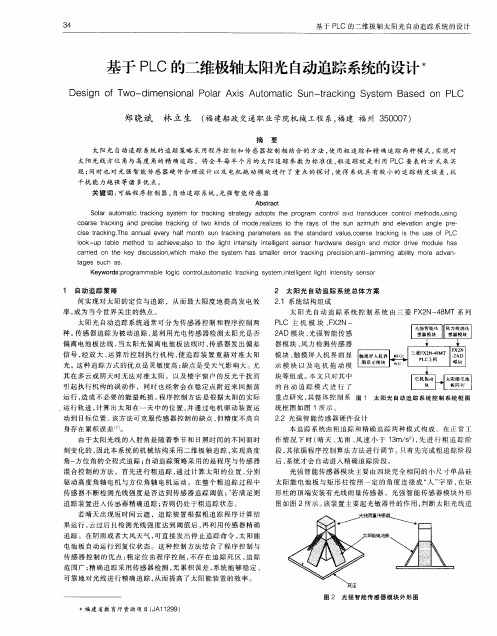
太 阳 光 自动 追 踪 系统 的追 踪 策 略 采 用程 序 控 制 和 传 感 器控 制 相 结合 的方 法 , 使 用粗 追 踪 和 精 确 追 踪 两种 模 式 , 实现 对
t a ge s s u ch as K ey wor ds : pr ogr amm a bl e l ogi c co n t r ol , au t o ma t i c t r ac k i n g s ys t e m, i n t el l i ge nt l i gh t i n t e n s i t y s e n s or
太 阳 光 线 方位 角与 高度 角 的精 确 追踪 。将 全 年 每 半 个 月的 太 阳追 踪 参数 为标 准值 , 粗追踪就是利用 P L C 查表 的 方 式 来 实 现; 同 时也 对 光 强智 能 传 感 器 硬 件 合 理 设 计 以及 电机 拖 动 模 块 进 行 了重 点 的探 讨 , 使 得 系统 具 有 较 小 的 追踪 精 度 误 差 , 抗
干扰 能 力越 强等 诸 多优 点 。 关键 词 : 可 编程 序 控 制 器 , 自动 追 踪 系统 , 光 强智 能 传 感 器
Ab s t r a c t
S ol ar a u t o mat i c t r a ck i ng s ys t e m f or t r ac k i n g s t r a t eg y a do pt s t h e pr o g r a m c on t r o l an d t r a n s du ce r c on t r o l m e t h ods , u s i n g c o ar s e t r ac k i n g an d pr e ci s e t r a c k i n g o f t wo k i n ds o f mo de, r ea l i z es t o t h e r a y s o f t h e s u n a z i mu t h an d el e v a t i on an gl e pr e —
基于CCD16点数学模型的全自动焦度计光学图像系统的设计
科技部科技成果重点 推广项 目( 0 E 00 4 2 3 C 0 8) 0
太 原市 科 技 创 业 种子 基 金 (8 14 0 2 1 1
和形状会发生变化 。通过C D C 接收和微机对图像位
置形状 的处理 ,可 得到被 测镜 片 的相 关参数 。
园圈弱圆
技术交流
准直透镜 待测镜片 分光光 阑 成像透镜 CD C 成像 面
收稿 日期 : 0 1 0 — 8 2 1- 5 1
图 1 自动焦 度计 的光 路 原理 图 。点 光源 发 出 为
的光 ,经 准 直 镜 准 直 ,照射 到 被 测 眼镜 片上 发 生
偏 折 ,再 经 过分 光 光 阑和 测量 透 镜投 射 到C D , C 上
在 C D上得到 含有数 学模 型 的图像 。 由于被 测镜 片 C 的屈光 状态 不一样 。在 C D C 上所 成像 的大小 、位 置
x - ls OoO lD) l y= i e s — 2 = n
由方程 ()% (l , + X22 2 I一ly)+ / - )22 2 y2 % - X T +
.
一
D 一l ,- y 2 X+y E (+ ) V(-, + z22 =X y X ) 22 2 l 匦
调焦原 理 的焦度计 多采 用高分 辨率 、双线 阵C D C 获 取光 路 信 号 ,通 过数 字 信 号 处 理 系统 进行 信 号 采 集 、分析 和 计算 ,并 驱 动步进 电机进 行 自动 对焦 , 从 而得 到 镜 片 的 相关 参 数 。基 于 投影 原 理 的 自动
1 全 自动焦 度计 光 学 算 法 推 导
在y 轴方 向上 的距 离 为 。假 设D 、D 分 别 为 柱 面
05-CCD图像传感器基本工作原理
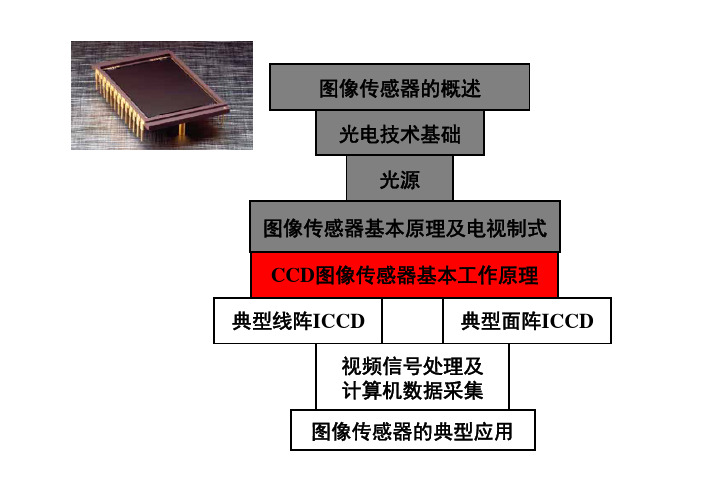
中国科学院长春光学精密机械与物理研究所
电荷的收集
光子入射到CCD中产生电子空穴对, 电子向器件中 电势最高的地区聚集,并在那里形成电荷包。每个电荷包 对应一个像元。
入射的光子
电荷收集 的效率与 电势的分 布、复合 寿命和扩 散长度有 关。
电荷包
像元边界
n-型硅 p-型硅
电极结构 SiO2 绝缘层
像元边界
表面势表征了耗尽区的深度,与栅极电压和氧化层厚 度有关
势阱:由表面势产生的阱
不同氧化层厚度
状空间。有的定义为:存 储电荷的电势分布状态。
电极上的电压越大,势阱 越深,可存储的电荷量越 多,也就代表了CCD器件 具有电荷存储功能。
不存在反型层电荷时
理论分析参见半导体物理
栅极电压不变时,表面势与反型层电荷密度的关系:
处于低电位,形成了势
电势
垒,并确定了这个像元
的边界。像元水平方向
势能
上的边界由沟阻确定。
中国科学院长春光学精密机械与物理研究所
电荷的收集 MOS 电容器
CCD曝光时,产生 光生电荷,光生电荷在 势阱里收集。随着电荷 的增加,电势将逐渐变 低,势阱被逐渐填满, 不再能收集电荷,达到 饱和。
势阱能容纳的最多
扩散产生了内部电场,在n-型层内电势达到最大。
电势
n p
这种‘埋沟’结构的优点 是能使光生电荷离开 CCD 表面,因为在CCD 表面缺欠多,光生电荷会 被俘获。这种结构还可以 降低热噪声(暗电流)。
电子势能最小的地方位 于n-型区内并与硅 - 二 氧化硅 (Si - SiO 2) 的 交界面有一定距离
1、三相电极结构(三相 CCD)
采用对称电极结构,三相 CCD是最简单的电极结构。 因为在某一确定的时刻,对存贮有电荷的电极而言, 两个相邻电极,需要一个被“打”开,另一个保持“关” 闭,以阻止电荷倒流。
CCD传感器的原理与应用
再与计算机中内存的标准图形信息进行比较,便可以计算出偏
差信息,并由计算机依据偏差大小作出判断后,发出指令对零 件进行接收或剔除。CCD光电传感器和计算机配合目前已用 来识别大规模集成电路(LSI)电路的焊点图案,不仅提高了 自动化程度,也使LSI电路的成品率大大提高
由于入射在CCD光电耦合器件上的光强分布不同,产生 的信号不完全相同,但是根据CCD光电耦合器件的特性,其 产生的信号在本质上是相同的。产生的典型信号如图所示。 从该图中CCD输出的信号可看出,信号处理的实质就是将 CCD输出的信号数值化,变成数字系统能够处理的数值信号。 为提高零件的测量精度,可利用高频信号对CCD输出信号实 现时间上的细分.从而极大地提高检测系统的测量分辨率, 此外,还可采用相应的数据处理方法,先将信号进行放大, 然后再进行数据处理。
CCD简介
电荷藕合器件(Charge Coupled Device 简称CCD ), 它使用一种高感光度的半导体材料制成,能把光线转变成电荷, 通过模数转换器芯片转换成数字信号。 CCD传感器是一种新型光电转换器件,它能存储由光产生 的信号电荷。当对它施加特定时序的脉冲时,其存储的信号电 荷便可在CCD内作定向传输而实现自扫描。它主要由光敏单元、 输入结构和输出结构等组成,具有光电转换、信息存贮和延时 等功能,已经在摄像、信号处理和存贮3大领域中得到广泛的应 用,尤其是在图像传感器应用方面取得令 人瞩目的发展。CCD 有面阵和线阵之分,面阵是把CCD像素排成一个平面的器件; 而线阵是把CCD像素排成一条直线的器件。
ccd传感器的应用125台湾地区的认证要求台湾标准检验局bsmi为了岛内电子电机产品的电磁辐射干扰于1995年5月公布商品电磁兼容性管理办法并于1996年7月正式公告自1997年1月1日起管制复印机等产品的电磁兼容性能而标准检验局也依据cispr与iec的emc标准逐渐修订岛内相应标准cns例如cns13438就是信息类产品的标准
视频监控系统中的动态目标检测与跟踪
视频监控系统中的动态目标检测与跟踪随着科技的不断发展,视频监控系统已经成为我们生活中不可或缺的一部分。
而其中一个重要的功能就是动态目标检测与跟踪。
本文将对动态目标检测与跟踪在视频监控系统中的应用进行探讨。
动态目标检测是指在视频监控中,通过算法识别并定位出视频中的运动目标,并在目标发生运动时跟踪目标的位置。
这项技术对于保障公共安全、监控交通流量等方面起到了重要的作用。
在一个视频监控系统中,动态目标检测与跟踪的过程可以分为多个步骤。
首先是目标检测,即通过图像处理算法对视频中的每一帧图像进行分析,识别出其中的运动目标。
目标检测算法有很多种,其中常用的包括基于背景建模的方法、基于光流的方法和基于深度学习的方法等。
基于背景建模的目标检测方法是通过学习视频中的背景信息,将背景和前景目标分离,从而实现目标的检测。
这种方法适用于静态背景下的视频监控。
而基于光流的方法则是通过检测连续帧之间的图像运动信息来确定视频中的运动目标。
这种方法适用于动态背景下的视频监控。
而基于深度学习的方法则可以通过训练神经网络来实现目标的检测,这种方法在最近的几年中得到了广泛的应用。
目标检测完成后,接下来的步骤就是目标跟踪。
目标跟踪是指在视频中追踪目标的位置,并保持目标的标识,以便后续的分析与处理。
目标跟踪有多种方法,包括基于模板匹配的方法、基于特征提取的方法和基于学习的方法等。
基于模板匹配的目标跟踪方法是通过提取目标的特征,将其与模板进行匹配,从而实现目标的跟踪。
这种方法适用于目标形状和外观变化较小的情况。
基于特征提取的方法则是通过提取目标的颜色、纹理和形状等特征来实现目标的跟踪。
而基于学习的方法则是通过训练分类器来实现目标的跟踪,这种方法在大数据时代得到了广泛的应用。
动态目标检测与跟踪技术在视频监控系统中有着广泛的应用。
首先,它可以用于监控公共场所,如机场、火车站、商场等地,及时发现异常和可疑行为。
其次,它可以用于交通监控,如交通路口的车辆检测与追踪,以及道路拥堵的监测与预警等。
工业自动化中的机器视觉考核试卷
4.以下哪种算法常用于机器视觉中的边缘检测?()
A.卷积算法
B.拉普拉斯算法
C.傅里叶变换
D.主成分分析
5.在机器视觉中,光学滤波器的作用是?()
A.提高图像亮度
B.减少图像噪声
C.改变图像颜色
D.调整图像对比度
6.关于图像处理的速度,以下哪项说法是正确的?()
A.算法越复杂,处理速度越快
1.以下哪些因素会影响机器视觉系统的成像质量?()
A.光源稳定性
B.镜头分辨率
C.相机的动态范围
D.环境温度
2.机器视觉系统在工业自动化中的应用包括哪些?()
A.产品分类
B.质量检测
C.机器人导航
D.生产计划
3.以下哪些是常见的图像处理技术?()
A.图像滤波
B.边缘检测
C.图像分割
D.数据挖掘
4.以下哪些因素会影响CCD相机的成像效果?()
6.在机器视觉中,______是一种通过光学手段获取物体三维信息的技术。
7.机器视觉系统中,______是用于检测和测量物体几何尺寸的设备。
8.深度学习在机器视觉中的应用,如______和______,极大地提高了检测的准确性和效率。
9.在机器视觉中,______是用于评估图像处理速度的一个重要指标。
14.在机器视觉中,以下哪种技术用于提高图像的动态范围?()
A. HDR(高动态范围成像)
B. SDR(标准动态范围成像)
C. DOF(景深控制)
D. 3D成像
15.以下哪种镜头在机器视觉中适合长距离成像?()
A.广角镜头
B.远摄镜头
C.微距镜头
D.鱼眼镜头
16.在机器视觉中,以下哪个环节是图像处理的第一步?()
ccd定位原理
ccd定位原理CCD定位原理。
CCD(Charge-Coupled Device)是一种广泛应用于数码相机、摄像机、扫描仪等光学设备中的光电转换元件,它的定位原理是通过对光信号的转换和处理,实现对物体位置的精确定位。
CCD定位原理的核心在于光电转换和信号处理,下面将详细介绍CCD定位原理的工作原理和应用。
首先,CCD定位原理的工作原理是利用半导体材料对光信号的敏感性。
当光线照射到CCD芯片上时,光子会激发半导体中的电子,使得电子在半导体中产生电荷。
这些电荷会被储存在CCD芯片的像素单元中,并且可以根据不同的光强产生不同的电荷量。
通过控制CCD芯片的曝光时间和光敏度,可以实现对光信号的精确捕捉和转换。
其次,CCD定位原理还涉及到对光信号的处理和转换。
CCD芯片中的电荷会经过AD转换器转换成数字信号,然后通过信号处理电路进行处理和放大,最终输出成为数字图像信号。
在这个过程中,CCD芯片会根据光信号的强弱和位置产生不同的电荷量,通过对这些电荷的转换和处理,可以实现对物体位置的精确定位。
最后,CCD定位原理在实际应用中具有广泛的应用价值。
在数码相机和摄像机中,CCD芯片可以将光信号转换成数字图像信号,实现对物体位置和形态的精确定位和捕捉。
在工业自动化领域,CCD定位原理可以应用于机器视觉系统中,实现对产品位置和形态的精确定位和检测。
此外,CCD定位原理还可以应用于光学测量、医学影像等领域,为各种应用场景提供精准的定位和测量技术支持。
总之,CCD定位原理是一种基于光电转换和信号处理的定位技术,通过对光信号的精确捕捉和转换,实现对物体位置的精确定位。
在各种光学设备和自动化系统中具有广泛的应用价值,为现代科技和工业生产提供了重要的技术支持。
希望通过本文的介绍,可以更好地理解CCD定位原理的工作原理和应用,为相关领域的研究和应用提供参考和帮助。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Ð Ñ D 4 ' --. ¡ ¢ £ Î /0121# J X Y Z Ð Ò Ó Ô Õ Y Ö × Ø Ù Î 9 Ú %& Û Ü J Ý Þ ß Ø Ú à '()*+#,"*$ Ó Ô á § â ãÐ Ò Î äÚ 9],$#X Ó Ô å £ +,#à æ ç Î9 Ú '()*+#,"*$ Ø Úà è "!^2* é êÓ Ô G ë T à Âì í î ÐÑ 5 6 î ï ð R S J ñ ò ó l { K D 4 ' J ô õ w --. ¡ ¢ £ ö ® ÷ D 4 ' ø ù ú û ü Õ Y ý x þ Î Ø Ú à ÿ « ! " # $ % ! & Õ Y Ö × ' ( ) * â + 9],$#X ¡ , * ã - ÷ å  ì Ð Ò 9 . Ê â + # à æ ç / 0 1 9 . Ê Â ì5 6 î y W6 a Õ " 20
'( ) * +, - . ¨½ ¾  bà ¹ Ä Å Ã ÆN Ä Å ` $ 6 $ % &% Ç
N È Ç B Z [ N f # É Ê Æ N k Ë 0 8 h Ì 6 È N Í o` "78!0 o º6Î Í oÏ x Ð º Ñ o Ò Ó Ô Õ ÖP×ÔØÖPÙÚÛÜ bCÝÞ[ßà-N6DÈ 8 9 : á 87(%9 :6 < = È ÇZ [ B â ãK Z [ | )%* f e N Q n ä å æ ç N è é Ô ê f å æçNèé 89ceDÈhnfåæNëP 8 9c e Dì K & ÈÇ í îZ [ B Dì f [ eN Û âm ï N ä e xðñ ò _óô õ Kö í Û â < ÷0ø ù á& ú û Û â <÷ 0 ø ü ` 8 ý â þ « ÷ÿ Ù Ú k þ ú ; ¡ Ù Ú ! " þ # K ö ý âÂ$%N&'( )*QöC ; ë+NÃ,&¿ « ; ë Ä Í .<=!8!- È Ç Z [ B 8 9 m ï - ( .
"#$%&'( )*%(+'$, -#-).& /0 % 1/'$) 2',3) -/4*(. 5%-.6 /$ !!" -.$-/*
869: ;<=>?<@=> .A9BA69: CD=?<D EA E<DF<=> 869: 8G<
!"#$%#& '()%*"+ ,#%-(./%01 !"#$%#& !"##!$ 23%#"
! " # $ % & ' ( ) * + , - . / 0 ( ) 1 2 3 4 ' 5 6 7 8 9 : / 0 ; < = 8 7 > ? @ A B C D 4 ' 5 6 @ A E : E F 2 G = 8 H I J K L M 4 N O P Q J D 4 ' 5 6 R S L M 4 N T U 4 T V J D 4 '5 6 R S W L M X Y Z J D 4 ' 5 6 R S [ @ A \ G C ] ^ _ H I ` a b c 5 6 /T R S B C d E b c & T e f g h L i j k l m n ( o K p q r G b c & s ' / T t u v w x y z { b c & 4/ T | } ~ w G W 6 / T 1m n /T J /T +XY { -.| 1* % B y { j K y D 4 ' 5 6 R S { [ R S J G w % D 4 ' B W 6 & | u --. ¡ ¢ £ ¤ K ¥ ¦ § ¥ ¨ © ª N ¢ « ¬ ® = ¯ ° ± ² ³ ´ µ ¶ · ¸ ¹ = º ( » D { ¼ ½ ¾ ¿ À Á Â Ã Ä Å | Æ H I \ G Ç %[R S K aÈ H I J\ G +,» É J ¥& ¶ È w ÊË Ì 9 :L M --. ¡ ¢£ J D 4'5 6 RS
75-)*%()8 (HIJGK <I L@IGM N= JOG PNQ FNQGR '-A '()*+#,"*$ NS %&(@KFP<=> FN<=J P<>OJ LH @ --. IG=INR /0121#T %OG= IJNRG JOG <K@>G <= JOG SP@IO KGKNRH U@RM Q<JO JOG '()*+#,"*$ @=M K@VG I<KFPG FRNUGII<=> JN JOG >R@FO JOG= M<IFP@H N= JOG IURGG= @SJGR JO@J JORND>O @ Q<RGPGII JR@=IK<II<N= IHIJGK JOG <=SNRK@J<N= SGM L@UV JN JOG IJGFFGR KNJNR UN=JRNP FP@JSNRKT8<JO JOG IDLM<W<I<N= MR<WGIJGFFGR KNJNR @DJNK@J<U@PPH UN=JRNPPGM JOG KNKG=J @PN=> JOG 345 M<RGUJ<N= NS JR@UV<=> IJ@J<N= IN JO@J JOG IHIJGK @UO<GWG JOG FDRFNIG NS MH=@K<U JR@UV<=> NS JOG FN<=J P<>OJ INDRUGT 6SJGR JOG @UJD@P JGIJ<=> @=M @=@PHI<I <=SNRK@J<N= JO@J JOG --. IG=INR UNPPGUJGM <I @UUDR@JG KNWGKG=J NS IGRWN UN=JRNP IHIJGK <I FRGU<IG @PP JOGIG FRNWGM JOG GSSGUJ<WG=GII @=M SG@I<L<P<JH NS JOG IHIJGK DPJ<K@JGPHT 9.# :/*6-8 '()*+# --. IG=INR JR@UV<=> IJGF KNJNR
34 5 6 7- . ::2 2 B Z [ 3 % @ " -,%!!4 -,%!!4 -RSCTBUEF
; < N % è N +I+V 6 Î @ ` $0%' W 0 XEPO ^ L YZ- ::I> ;Q.: J-, Ü è u V N ± w ÷ ^n é N 7 h ::I>7&8( 0 ' ª } P ¦ 6Î NP h !!8' W (& XEP 3 %N -,%!!4 8 9 N 0' è ª} N P h7 3 % Î N
2345 !#"!7"#7"2
361 * !#"!"#"#X
789: !"# "$$" 2 3 ,- | } t . A
1"
!"#$%& !"#$ %
!" # $ % #& & ' ( ) * + , -. / 0 1 2 3 2 4 5 6 7 8 9 : ; &%' < = 8 9 * > ? @ A B " - C D E F G H I B ! J (& & K L B ( J (! M N (! & O P Q R B < = S C T U V W 8 9 X Y Z [ \ ] )!* ^ L _ ` +,-./ a 8 9 b ) c d " e f g h i , j ] k l m % < = n o p q r s 8 9 b t s q r O u j v w )$* b x + y z { % _ | 7 N } ~ X Y f e Z [ B 9 8 9 e Y W O 0 (!0&% +12(!0&%3 * V W X Y þ B Z 89 C [ \ N í Ý ] A>+?8@ * % .JI Y W 8 9 × ^ <:K f g í _ z 2 P é × í è J 8í î _ ` f g a ¿ Â 9 8 9 % º U e í A>+?8@ b ( c .LBFM4NCOPQ< d e 8 9 f [ g ô P h i ¦ j = ¿ :>: k l P ì m P h 8 n 2 A>+?"@ P r o s b 9 =("D46 N P é 8 ? L E w â Z p C (( 6- ú c q Y 7 e N E w â p C (!7@ 6- @ " 8 9 r G +¿ s t O u ò e Ou u º Ì +y v( E F P h 3 w ñ) x y z µ / /Ü { U | % {% ;>+?"@ m ï c 3 w N ª } Á f g 2 ~ b ::2 2 B g ä É Ê Æ g z ¿0ë ;>+?"@