台达canopen教程
CANopen使用手册(V1.00)

CANopen使⽤⼿册(V1.00)CAN open使⽤⼿册ProNet伺服驱动器ESTUN修订记录⽇期修订版本描述作者2009/4/25 1.00 初稿完成移振华2009/9/22 1.00 增加第8章移振华—— ⽬录 ——1、概述 (5)1.1 CAN 主要相关⽂档 (5)1.2 本⼿册使⽤的术语和缩语 (5)1.3 CANopen概述 (6)2、接线和连接 (7)3、CANopen通讯 (8)3.1 CAN标识符分配表 (9)3.2 服务数据对象SDO (10)3.3 过程数据对象PDO (12)3.3.1 PDO参数 (14)3.4 SYNC报⽂ (20)3.5 Emergency报⽂ (21)3.6 HEARTBEAT报⽂ (23)3.7⽹络管理(NMT) (24)4、单位换算单元(Factor Group) (26)4.1 单位换算相关参数 (27)4.1.1 position factor (27)4.1.2 velocity factor (29)4.1.3 acceleration factor (30)5、位置控制功能 (31)5.1 位置控制相关参数 (33)6、设备控制 (35)6.1 控制状态机 (35)6.2 设备控制相关参数 (36)6.2.1 controlword (37)6.2.2 statusword (38)6.2.3 shutdown_option_code (39)6.2.4 disable_operation_option_code (40)6.2.5 quick_stop_option_code (40)6.2.6 halt_option_code (41)6.2.7 fault_reaction_option_code (41)7、控制模式 (42)7.1 控制模式相关参数 (42)7.1.1 modes_of_operation (42)7.1.2 modes_of_operation_display (43)7.2 回零模式(HOMING MODE) (44)7.2.1 回零模式的控制字 (44)7.2.2 回零模式的状态字 (44)7.2.3 回零模式相关参数 (45)7.2.4 回零⽅法 (47)7.3 速度控制模式(PROFILE VELOCITY MODE) (49) 7.3.1速度模式的控制字 (49)7.3.2 速度模式的状态字 (49)7.3.3 速度控制模式相关参数 (49)7.4 位置控制模式(PROFILE POSITION MODE) (53) 7.4.1 位置模式的控制字 (53)7.4.2 位置模式的状态字 (53)7.4.3 位置控制相关参数 (54)7.4.4 功能描述 (56)8、CAN通讯相关参数 (58)附录对象字典表 (59)1、概述1.1 CAN 主要相关⽂档Document Name Source 3014.01: CiAVDSCiACANopen Communication Profilefor Industrial Systems - based on CALCiA DSP 402 V 2.0: CiACANopen Device Profile1.2 本⼿册使⽤的术语和缩语CAN控制器局域⽹CiA在⾃动化国际⽤户和制造商协会中的 CAN。
台达CANopen现场总线产品通讯整合应用实例
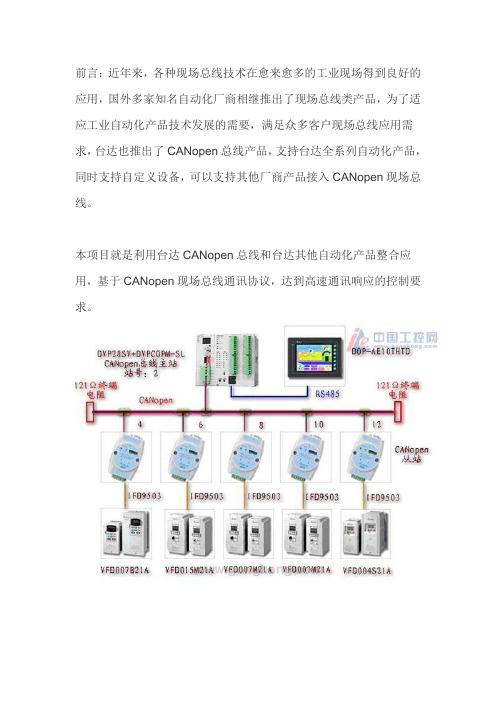
前言:近年来,各种现场总线技术在愈来愈多的工业现场得到良好的应用,国外多家知名自动化厂商相继推出了现场总线类产品,为了适应工业自动化产品技术发展的需要,满足众多客户现场总线应用需求,台达也推出了CANopen总线产品,支持台达全系列自动化产品,同时支持自定义设备,可以支持其他厂商产品接入CANopen现场总线。
本项目就是利用台达CANopen总线和台达其他自动化产品整合应用,基于CANopen现场总线通讯协议,达到高速通讯响应的控制要求。
控制系统技术方案配置:详见下表序号元件名称型号规格数量(台)备注1人机界面DOP-AE10THTD110.4”2PLC主机DVP28SV11R116K Step3CANopen主站DVPCOPM-SL1SV左侧高速扩展4CANopen从站IFD95035CANopen/Modbus5变频器VFD007B21A750W,单相220V6变频器VFD007M21A3750W,单相220V7变频器VFD004S21A1400W,单相220V上述表格仅列举出技术方案主要元器件,此外还包括121Ω终端电阻以及其他通讯连接电缆等辅助器件,此处均不予赘述。
控制系统原理框图简要介绍:采用CANopen现场总线作为通讯介质,主要为了实现多从站大量数据高速通信响应和提高通讯稳定性,和传统Modbus通讯协议比较,CANopen总线通讯协议有质的飞跃,数据通讯不再受到Modbus轮询方式的制约,大大提高了主从站之间的大量数据通讯响应速度和稳定性。
人机界面通过RS485和主站28SV PLC连接,28SV左侧高速并行接口连接CANopen总线主站模块DVPCOPM-SL,5台CANopen 总线从站模块IFD9503分别连接5台台达变频器,系统实现人机输入频率和启停命令,实时显示变频器输出频率、电流、电压等参数数值。
控制系统原理框图:人机界面画面如下:人机界面可以实现:分别设定5台变频器给定频率和启动、停止运转信号;可以分别显示5台变频器运行参数数据,包括输出频率、输出电流、输出电压等等。
CANopen使用手册_V1.01_.

ProNet 伺服驱动器ESTUNCANopen 使用手册修订记录日期修订版本描述作者初稿完成移振华增加第8章移振华1、第3,3,1章“PDO 参数”,修正PDO 默认表格中的COB-ID 和default 值;易健2、增加第9章“通讯例程”——目录——1、概述............................................................................................................................................ . (5)1.1 CAN 主要相关文档 (5)1.2 本手册使用的术语和缩语 (5)1.3 CAN OPEN 概述 (6)2、接线和连接 (7)3、CANOPEN 通讯 (8)3.1 CAN 标识符分配表 (9)3.2 服务数据对象SDO (10)3.3 过程数据对象PDO (12)3.3.1 PDO参数 (14)3.4 SYNC 报文 (20)3.5 E MERGENCY 报文 (21)3.6 HEARTBEAT 报文 (23)3.7网络管理(NMT ) (24)4、单位换算单元(FACTOR GROUP) (26)4.1 单位换算相关参数 (27)4.1.1 position factor (27)4.1.2 velocity factor (29)4.1.3 acceleration factor (30)5、位置控制功能 (31)5.1 位置控制相关参数 (33)6、设备控制 (35)6.1 控制状态机 (35)6.2 设备控制相关参数 (36)6.2.1 controlword (37)6.2.2 statusword (38)6.2.3shutdown_option_code (3)96.2.4disable_operation_option_code (40)6.2.5quick_stop_option_code (4)6.2.6halt_option_code (41)6.2.7fault_reaction_option_code (41)7、控制模式 (42)7.1 控制模式相关参数 (42)7.1.1modes_of_operation (42)7.1.2modes_of_operation_display (43)7.2 回零模式(HOMINGMODE ) (44)7.2.1 回零模式的控制字 (44)7.2.2 回零模式的状态字 (44)7.2.3 回零模式相关参数 (45)7.2.4 回零方法 (47)7.3 速度控制模式(PROFILE VELOCITYMODE ) (49)7.3.1速度模式的控制字 (49)7.3.2 速度模式的状态字 (49)7.3.3 速度控制模式相关参数 (49)7.4 位置控制模式(PROFILE POSITIONMODE ) (53)7.4.1 位置模式的控制字 (53)7.4.2 位置模式的状态字 (53)7.4.3 位置控制相关参数 (54)7.4.4 功能描述 (56)8、CAN 通讯相关参数 (58)9、CANOPEN 通讯例程 (59)9.1 SDO 操作; (59)9.2 PDO 配置 (59)9.3 位置控制例子(P ROFILE P OSITON MODE ) (60)9.4 位置插补控制(I NTERPLATE P OSITION MODE ) (61)9.5 速度控制(P ROFILE V ELOCITY MODE ) (62)9.6 回零 (6)2对象字典表 (64)1、概述1.1 CAN 主要相关文档 CiA DS 301 V 4.01: CiA CANopen Communication Profilefor Industrial Systems - based on CALCiA DSP 402 V 2.0: CiA CANopen Device Profile1.2 本手册使用的术语和缩语CANCiACOBEDSLMTNMTOD参数PDORORWSDO控制器局域网在自动化国际用户和制造商协会中的 CAN。
台达CANopen通讯伺服速度S控制

16.16 通过CANopen 总线控制ASDA-A2伺服驱动器(DS402)¢ 控制要求当 X0=ON 时,变频器停止并进入准备运转状态;当 X1=ON 时,变频器运转,运转速度为900转/分钟,运转方向为顺时针旋转。
¢ 连接示意图¢ 台达ASDA-A2 伺服驱动器通讯参数设置¢ ADSA-A2 伺服驱动器在本例中配置的参数说明参数 设置值 说明P1-01 b 设置伺服工作模式为CANopen模式。
P03-002设置ASDA-A2伺服CANopen 站号P03-01 0400ASDA-A2伺服CANopen 通讯速率设置为1Mbps 。
P03-01的第三位用于设置伺服的CANopen 通讯速率,其值与通讯速率对应关系如下所示:0:125Kbps 1: 250Kbps 2: 250Kbps 3: 500Kbps 4: 1M Kbps参数索引 参数子索引 参数说明 6083 0 伺服驱动器才从0rpm 加速到3000rpm 需要的时间,单位ms 。
6084 0 伺服驱动器才从3000rpm 减速到0rpm 需要的时间,单位ms 。
6081 0 伺服驱动器速度,单位为单元/每秒。
607A 0伺服驱动器目标位置,单位为单元。
¢模块设置按照下表分别对DVPCOPM-SL扫描模块进行设置模块名称节点地址通讯速率DVPCOPM-SL 扫描模块011M bpsASDA-A2伺服驱动器021M bps¢使用 CANopen 网络配置工具配置网络1. 打开 CANopenBuilder 软件,软件界面如下图所示。
2. 选择『设置(S)』菜单,点击『通讯设置』,选择『串口设置』指令。
3. 在此对计算机与 SV 主机的通讯参数进行设置。
如”通讯端口”、”通讯地址”、”通讯速率”、”通讯格式”。
项目说明默认值当计算机连接的设备为DVPCOPM-SL时,接注:CANopenBuilder 组态软件中的通讯速度,数据位,校验位,停止位以及模式的选择须与 SV PLC 主机设置一致。
CANopen通信

Device Profile CiA Device Profile CiA Device Profile CiA
DSP-401
DSP-404
DSP-XXX
OSI Layer 7 應用層
CiA DS-301 通訊概況
OSI Layer 2 資料連結層
CAN 控制器
CAN 2.0A
OSI Layer 1 物理層
Index Sub
Definition
Value
R/W Size
0x1A00 0 0. Number
PDO SDO SYNC Time Stamp EMCY Boot-up NMT
初始化 ○
预运转
○ ○ ○ ○
○
(15) 自动进入重置应用状态
(16) 自动进入重置通讯状态
A: NMT
B: Node Guard
C: SDO
D: Emergency
E: PDO
F: Boot-up
运转
停止
○
○
○
○
○
○
○
3
C2000 之 CANopen 通讯简介
(1) 初始化
(15) 重置應用
(16) 重置通訊
(9) (10)
( 11 )
D
(3)
(4) (5)
(6) 運 轉A B C D
(7) 停止 AB
(8)
(1) 开启电源后,自动进入初始状态 (2) 自动进入预运转状态 (3) (6)启动远程节点 (4) (7) 进入预运转状态 (5) (8) 停止远程节点 (9) (10) (11) 重置节点 (12) (13) (14)重置通讯
型态数目
Cyclic
关于CANopen通讯模块的使用方法
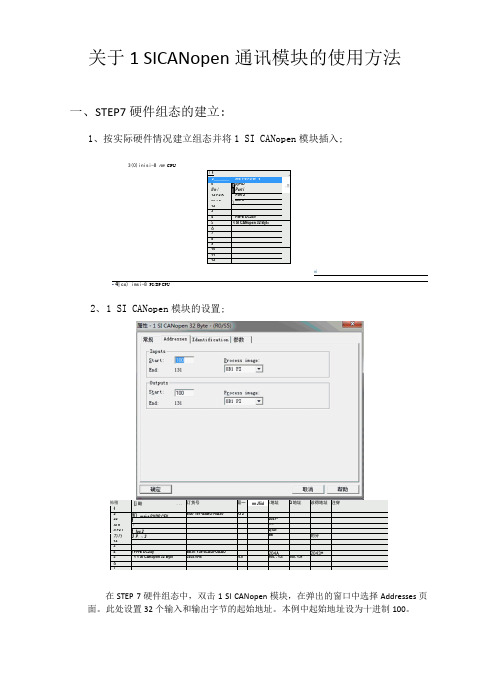
关于1 SICANopen通讯模块的使用方法一、STEP7硬件组态的建立:1、按实际硬件情况建立组态并将1 SI CANopen模块插入;3(0)inisi-8 nm CPU「1A2 ________ ms 1-8 P9/W "VIl n /irIFpjr-iDPert i,三12 P2 K Fort 2X1 P3\Are 31234PM-E DC24V5| 1 SI CANopen 32 Byt<6789101112ni- 4| co) imsi-8 PS/DP CPU怖稽[j 酸...订货号固一nn Jfiid i地址Q地址诊得地址注穿12即msi-s P9/DP CFV6IS7 151-GABO1-0A90Y3 22212047^Xi n *I*/冢如Il P2 l 1 foe 22(X5/力乃J P。
八3aw*的分1234y PH-E DC24y BEST 138-4CAOI-OAAO204A2043*5 1 1 SI CAKopon 32 Byte020570-B VI.0100. . 13!100. 13167在STEP 7硬件组态中,双击1 SI CANopen模块,在弹出的窗口中选择Addresses页面。
此处设置32个输入和输出字节的起始地址。
本例中起始地址设为十进制100。
2、1 SI CANopen模块的设置;在性-1 SI CANopen 32 Byte - (R0/S5)常规Addresses | Identification确定选择“参数”页面,设置“Baudrate”以及input/output data size,如上图所示。
PS:理论上Process data mode因为本次传输数据在32 Byte内,可选择Standard模式,但不知道为什么会报错,所以选择Fragmented模式。
双击STEP 7硬件组态中的CPU,选择“周期/时钟存储器”,修改过程映像输入/输出区的大小。
台达CANopen及A 伺服简易手册
台达产品简易操作手册(一)台达A2伺服马达接头及对应线序(二)台达A2伺服编码器对应接口视图及线序(三)台达A2伺服PR模式参数设定及对应关系表模式设定P1‐01=1DI1=101伺服使能DI2=108相应PR触发DI3=111(POS0)DI4=112(POS1)DI5=113(POS2)DI6=11A(POS3)DI7=11B(POS4)DI8=11C(POS5)一点说明:(1) 当选定一个PR需要运行时,请首先选择,然后在一点延时触发,这样保证能够运行起来,因为触发是脉冲沿有效。
(2) 当需要行走的距离很长时,PR设定的脉冲无法满足要求是,请设定电子齿轮比,相关参数为P1‐44,P1‐45,电子齿轮比是全局参数,一旦设定所有的PR都按照这个比例行走。
(四)CANopen组态介绍1.首先需要安装台达相应的组态软件CANopen Builder,图标如下图2.安装完成如下图3.开始组态步骤一,如下图一图一4.操作如下:请双击右侧窗口的相应的伺服图片,出现如下窗口。
图二4.开始组态步骤三,配置PDO ,如下图三操作如下:窗口1(如下图)的C 部分,打开时可能有默认数据,如有则没有关系可以把它删除掉,然后根据实际需要进行重新配置。
PDO 里面的Rceive PDO Comm…表示伺服接收的内容,即上位机发送给伺服。
PDO 里面的Transmit PDO Comm…表示伺服发出的内容,即上位机从伺服接收。
双击此图标图三5.开始组态步骤四,配置PDO ,如下图四‐1,图四‐2 操作如下:(1)双击窗口1里面的C 部分的一个参数,出现窗口 图四‐1,如下图四‐1在“参数群”部分选择需要的参数,这里必须需要选择P4‐07,利用“下移”按钮进行选择,也可利用“上移”按钮进行移除。
完毕之后确定即可。
(2)双击窗口1里面的C 部分的另外一个参数,同样出现窗口 图四‐2,如下图四‐2 在“参数群”部分选择需要的参数,这里根据需要可以选择P0‐01(伺服报警),利用“下移”按钮进行选择,也可利用“上移”按钮进行移除。
台达Canopen总线应用
添加PDO PDO映射
Delta Confidential
确定控制对象或参数
DS301协议: 如果应用的是DS301模式,需要根据项目要求确定需要通过Canopen进行交 换的伺服参数,例如P3-06 DS402协议: 如果应用的是DS402协议,需要根据项目要求,确定必须的控制对象,例如 控制字6040H。 以上参数及控制字根据项目不同是不同的,每个项目都需要在对项目工艺本身 进行详细了解之后确定
Canopen总线
公司:中达电通股份有限公司 部门:运动控制产品处(IMS) 日期:2013年12月01
内容大纲
Canopen总线型伺服
A2-M
硬件连接&参数设置
硬件连接,站号,通讯协议,通信波特率
上位配置
通讯设置,网络搭建,总线配置
Delta Confidential
Canopen总线伺服A2-M
Delta Confidential
DS031&DS402
DS301协议: 单纯通讯协议,上位机可以通过DS301协议,读写驱动器中的参数,在速度、位置、 扭矩模式下都可以使用。 例如在PR模式下,可以通过DS301下载PR路径参数及触发命令。 DS402协议: 一种现场运动控制协议,上位机可以设置驱动器工作在PP、PV、IP或者Home等模 式下进行操作。驱动器需设置在0B或0C模式下(P1-01) 在此协议下,驱动器只需设置工作模式,站号,通讯波特率。其他一切配置及控制 逻辑都有上位机根据协议规定下达指令就可以了。
Delta Confidential
Smarter. Greener. Together. 共创智能绿生活
谢谢
想深入了解中达电通,请浏览
工作模式(P1-01):0B或者0C 驱动器站号(P3-00):按顺序设置,不可重复 通讯波特率(P3-01):与上位机保持一致
台达CANOPEN模块
台达PLC通讯控制伺服教程
4
A
自动SDO配置:在Index(hex):选择 (P3-06)在数据(hex)输入
(1F3F),点击确认后在显示(3F1F),P3-06用于确定P4-07位功能。
5
A
PDO配置
6
A
PDO配置 7
A
P4-07位控制定义8A9 NhomakorabeaA
10
A
11
A
伺服通过软件设置站号、通信格式、波 12 特率
属性设置为同步 P5-05 (回零第一段速) RX1401 P5-75 (运行速度) RX1401 P6-03 (运行位置) RX1402 P6-21 (待机位置) RX1402 读; P0-01 (伺服报警) TX1800 P0-09 (伺服当前位置) TX1800
以下
修改监控时间,延长通讯时间
A
5;显示外部给定目标位置
18
A
A
19
定位控制时P6-03为位置来源
1;点击原点复归模式
2;选择到路径10(路径10设置为回零点进行设置)
16
3;选TYPE路径型式
4;选位置命令
A
5;选运行速度
6;p621待机位给定目标位置
决对定位伺服软件设置: (决对定位路径1设置)
1;选择到路径10
2;选TYPE路径型式
17
3;选位置命令终点
4;选运行速度(选择PLC-PDO配置运行速度P5-75)
1
A
台达PLC以Canopen控制伺服
2
在线描硬件,
SDO自动配置
A
SDO配置内容
3
A
SDO设置;p3-06(伺服DI来源设定3F1F) SDO自动 POD设置; 写; P4-05 (JOG手动控制) RX1400 属性设置为异步255 P4-07 (DI控制外部端子控制P2-10—P2-17设定端子功能) RX1401