2.3.2磁悬浮导轨
导轨的分类
导轨的分类导轨是一种机械装置,通常用于支撑和引导运动部件,例如机器人的轨迹控制系统。
根据其用途和结构,导轨可以分为几种类型。
在本文中,我们将讨论常见的导轨分类和每种导轨的特点。
1. 线性导轨线性导轨是最常见的导轨。
它们由一个平面滑块和一个平行于滑块的导轨构成,通常用于机床、加工中心、工业机器人等高精度运动系统中。
线性导轨通常采用金属、聚合物等材料制成,具有高刚度性和高导向精度。
线性导轨分为两种类型:球滑轨和滚子滑轨。
球滑轨通过高质量钢球之间的压力来滚动并缩小摩擦,这将使导轨的运动更加平稳和高速,且摩擦力很小。
滚子滑轨通常由滚柱和滚道组成,当滚柱滚动时,滚动摩擦力也很小。
一般来说,滚子式导轨承载能力更大,但价格和复杂性较高。
2. 圆柱导轨圆柱导轨使用圆滚柱承载工作负载,它们通常用于高速旋转轴承、钻头、精密夹头等装置中。
它们通常由两条对称的同轴圆柱面和圆柱滚珠或圆柱滚子组成。
圆柱导轨的优点包括较高的承载能力、抗冲击和抗转向荷载能力,以及增加轴向和径向刚度。
3. 螺旋线导轨螺旋线导轨是由滑块和螺旋线导向的导轨组成的。
由于其螺旋线导向的形状,它们适用于重负载和高刚度应用。
螺旋线导轨提供了更大的承载能力和较大的导向面积,更适合用于运行负载更重的某些机器人和精密机械设备。
4. 直线电机导轨直线电机导轨是一种使用电磁原理推动导轨的高速运动系统。
这种导轨通常用于高速运动系统、自动化机器人和其他需要高速、高精度运动的机械设备。
直线电机导轨通过间隙电磁作用原理,通过电流来产生电磁感应,推动导轨运动。
这种技术提供了相对轻松的运动控制,同时又可以用液压或气动系统进行控制。
总的来说,导轨的分类涵盖了许多机械设备的运动控制方面。
自动化机器人和其他先进的机械设备的使用可以受益于这些导轨的发展和使用。
无论您需要哪种导轨,它们都可以为您的机械加工和运动系统提供帮助。
无论你是要在电子液压系统中使用线性导轨还是在自动化机器人中使用螺旋线导轨,你需要了解导轨的特点和参数才能选择到最适合你机械设备的运动控制部件。
中低运量城轨交通系统分析与选型
中低运量城轨交通系统分析与选型王军贤(通号城市轨道交通技术有限公司,北京 100070)摘要:分析新型中低运量城市轨道交通系统的技术特点、类型、关键技术以及国内外各系统的应用情况,阐明各系统的市场应用定位,并对新型中低运量城轨交通系统的性能特点和应用前景进行综合分析,为轨道交通系统选型以及城市规划提供一定的参考。
关键词:新型中低运量;有轨电车;单轨;技术特征中图分类号:U292.91 文献标志码:A 文章编号:1673-4440(2022)03-0075-04Analysis and Selection of Urban Rail Transit System WithMedium and Low VolumeWang Junxian(CRSC Urban Rail Transit Technology Co., Ltd., Beijing 100070, China)Abstract: This paper analyzes the technical characteristics, types, key technology, and the application of the system at home and abroad of new low and medium volume urban rail transit, expounds the market application positioning of each system, and then comprehensively analyzes the characteristics and the application prospect of new type low and medium urban rail transit system, so as to provide reference for the selection of urban rail transit system and urban planning.Keywords: medium and low volume; tram; monorail; technical characteristicsDOI: 10.3969/j.issn.1673-4440.2022.03.015收稿日期:2021-02-02;修回日期:2022-01-20基金项目:通号城市轨道交通技术有限公司科研项目 (5100-K1210004)作者简介: 王军贤(1985—),男,高级工程师,硕士,主要研究方向:铁路信号系统集成,邮箱:*************.cn 。
浅谈高中物理知识在实际生活中的应用——以电磁学为例
193神州教育浅谈高中物理知识在实际生活中的应用——以电磁学为例刘奕洲邯郸市第一中学摘要:近年来,伴随着我国教学改革的深入推进,社会各界对于教育领域的要求也越来越高,在教学活动中,需要从我们的实际生活出发,要利用知识与生活的契合点来提升我们的学习兴趣。
因此,在实际中,我们要特别注重提升知识在生活的应用,对此下面就高中物理电磁学知识在生活中的应用展开分析。
关键词:高中物理;电磁学;生活;应用前言在学习高中物理知识时,要求我们应该具备良好的逻辑思维能力,并且要具有将抽象知识转变成形象化、具体化的能力。
在实际中,我们学习物理知识时,可以将其与我们自身的实际生活联系起来,这样不仅可以提升我们对物理知识的理解,同时还可以提升我们对物理知识的实践应用能力。
电磁学是高中物理中十分重要的一个组成部分,目前已经发展成为无线电电子学、电工学等领域的基础理论,其与我们的生活有十分紧密的关联,因此,我们在学习高中物理电磁学知识时,应该特别看重电磁学知识在实际生活中的应用。
1.高中物理电磁学知识的相关概述对于电磁学,是从传统的电学、磁学两个学科中逐渐融合产生的一个新的物理学分支,其主要是在电流磁效应、变化的磁场电效应实验下产生的,其内容涉及到电流产生电场、电荷、磁场规律等。
在电磁学中,电学、磁学往往是相互作用的,切割磁感线的导体在出现变化时,就会产生相应的感应电动势,这时切割磁感线的导体就相当于一个电源,如果将其与电容器连接起来,就可以进行充电;如果连接上电阻等用电器,则可以为用电器供电,产生电流。
目前,电磁学已经广泛渗透在我们的日常生活中,如各种家用电器的使用,其不仅提升了我们生活质量,改善了我们生活状态,同时还促进了我们工作、学习效率的提升。
2.高中物理电磁学知识在实际生活的应用2.1 电磁炉在我们日常生活中,电磁炉是十分常见的厨房用品之一,在电磁学的影响下,电磁炉从以往的明火、传导式加热方式转变成现代的直接在锅底产生热量,极大的提升了热效率。
磁悬浮轨道结构
磁悬浮轨道结构
磁悬浮轨道结构主要由轨道基础、导向系统、悬浮系统和牵引系统四个部分组成。
1.轨道基础:轨道基础是所有部件的基础,主要由混凝土和钢筋
网构成,承受着车辆和乘客的重量。
2.导向系统:通过导轨和导向磁铁等装置将车辆固定在轨道上下
行,保证了行驶的稳定性。
3.悬浮系统:悬浮系统包括悬浮磁体和控制系统,是实现车辆悬
浮的关键部分。
根据不同的悬浮方式,磁悬浮列车可分为常导电磁悬浮列车和超导电磁悬浮列车。
常导电磁悬浮列车采用直流励磁线圈产生磁场,通过改变电流大小来控制磁场强度,从而实现车辆的悬浮和导向。
超导电磁悬浮列车采用超导线圈产生磁场,通过改变线圈电流方向来控制磁场方向,从而实现车辆的悬浮和导向。
4.牵引系统:牵引系统通过磁场和电场的相互作用,产生推力,
使车辆前进。
根据不同的牵引方式,磁悬浮列车可分为同步直线电机牵引和异步直线电机牵引。
同步直线电机牵引采用直线同步电机产生磁场和感应电动势,通过控制磁场和电流来驱动车辆前进。
异步直线电机牵引采用异步电机产生磁场和感应电动势,通过控制磁场和电流来驱动车辆前进。
以上就是磁悬浮轨道结构的四大组成部分。
它具有高效、快速、安全、舒适、节能等优点,是一种先进的交通方式,未来有望成为城市交通的主流选择之一。
导轨的分类
导轨的分类
导轨是一种常见的机械元件,它可以使物体沿着特定的方向移动,并且具有较高的精度和稳定性。
根据不同的使用场景和要求,导轨可以分为以下几种类型:
1. 直线导轨:这种导轨适用于需要物体沿着直线方向移动的场景,通常由两个互相平行的导轨构成。
直线导轨可以分为滑动导轨和滚动导轨两种类型,滚动导轨的运动更加平稳,使用寿命也更长。
2. 圆弧导轨:该导轨适用于需要物体做曲线运动的场景,其形
状通常为弧形或环形。
圆弧导轨可以分为内弧导轨和外弧导轨,内弧导轨常用于机床加工等领域,而外弧导轨则常用于机器人、自动化流水线等场景。
3. 悬臂导轨:该导轨适用于需要支持物体并使其沿一定轨迹运
动的场景,通常由一个固定的支架和一个悬臂的导轨构成。
悬臂导轨可以分为竖直悬臂导轨和水平悬臂导轨两种类型,其形状和结构根据不同的使用场景而有所不同。
4. 线性电机导轨:该导轨采用线性电机作为驱动方式,适用于
需要高速、高精度、高加速度的直线运动场景。
线性电机导轨具有较高的控制精度和动态响应能力,广泛应用于半导体制造、光学设备和医疗器械等领域。
总之,导轨种类繁多,根据具体的应用场景和要求,选择合适的导轨可以提高设备的运行效率和性能。
- 1 -。
3 磁悬浮导轨实验
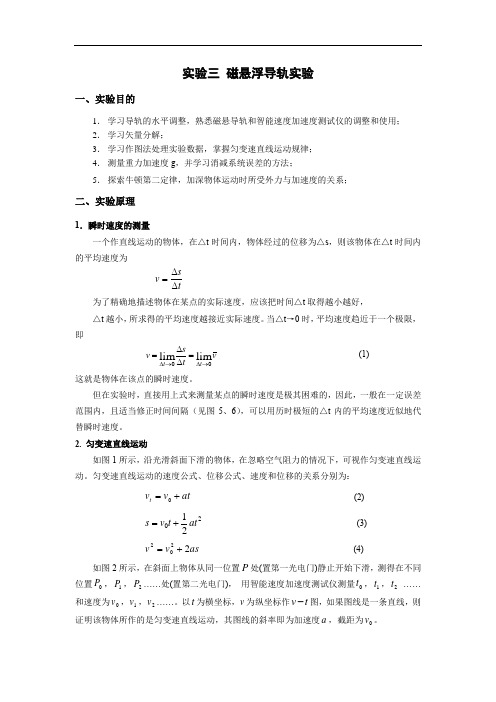
实验三 磁悬浮导轨实验一、实验目的1. 学习导轨的水平调整,熟悉磁悬导轨和智能速度加速度测试仪的调整和使用; 2. 学习矢量分解;3. 学习作图法处理实验数据,掌握匀变速直线运动规律; 4. 测量重力加速度g ,并学习消减系统误差的方法;5. 探索牛顿第二定律,加深物体运动时所受外力与加速度的关系;二、实验原理1.瞬时速度的测量一个作直线运动的物体,在△t 时间内,物体经过的位移为△s ,则该物体在△t 时间内的平均速度为tsv ∆∆=为了精确地描述物体在某点的实际速度,应该把时间△t 取得越小越好,△t 越小,所求得的平均速度越接近实际速度。
当△t →0时,平均速度趋近于一个极限,即v t sv t t lim lim0→∆→∆=∆∆= (1)这就是物体在该点的瞬时速度。
但在实验时,直接用上式来测量某点的瞬时速度是极其困难的,因此,一般在一定误差范围内,且适当修正时间间隔(见图5、6),可以用历时极短的△t 内的平均速度近似地代替瞬时速度。
2. 匀变速直线运动如图1所示,沿光滑斜面下滑的物体,在忽略空气阻力的情况下,可视作匀变速直线运动。
匀变速直线运动的速度公式、位移公式、速度和位移的关系分别为:at v v t +=0 (2) 2021at t v s += (3) as v v 2202+= (4)如图2所示,在斜面上物体从同一位置P 处(置第一光电门)静止开始下滑,测得在不同位置0P ,1P ,2P ……处(置第二光电门), 用智能速度加速度测试仪测量0t ,1t ,2t ……和速度为0v ,1v ,2v ……。
以t 为横坐标,v 为纵坐标作t v -图,如果图线是一条直线,则证明该物体所作的是匀变速直线运动,其图线的斜率即为加速度a ,截距为0v 。
同样取1--=i i i P P s ,作t ts -图和s v -2图,若为直线,也证明物体所作的是匀变速直线运动,两图线斜率分别为a 21和a 2,截距分别为0v 和2v 。
磁悬浮铁路

第八章 磁悬浮铁路
第二节 磁悬浮铁路的工作原理
二、工作原理
(三)牵引原理 由于磁悬浮列车是悬浮在一定的高度,使车轮与导轨脱离,故不再是依靠它们之 间的摩擦力产生牵引力使车辆前进了,而是采用一种叫做直线电机的牵引装置作为列 车的牵引动力。这种无接触的牵引工作原理类似于转动的同步电动机,只是它将旋转 的电机的定子切开,并且沿着线路方向展开,这样,在定子上产生的就不再是一个旋 转的行波磁场,而是一个移动的行波磁场。列车的悬浮电磁铁通电后,就成为电动机 的转子(励磁磁极)。路轨上的定子中三相绕组产生的移动行波磁场,作用在车上的悬 浮磁铁(转子)上,产生同步的电磁牵引力,引导磁悬浮列车前进或后退。同步直线电 机驱动(如图8-7所示)。调节定子供电的频率与电压,即可改变磁悬浮列车的运行速 度。
第一节 磁悬浮铁路的简介
一、磁悬浮铁路
磁悬浮铁路(Maglev Railway)是一种新型的交通运输系统,它是利用电磁系统产生
的排斥力将车辆托起,使整个列车悬浮在导轨上,利用电磁力进行导向,利用直线电
机将电能直接转换成推动列车前进。它消除了轮轨之间的接触,无摩擦阻力,线路垂 直负荷小,时速高,无污染,安全,可靠,舒适。 其应用前景依然不如高速铁路。
第三节 磁悬浮铁路的基本设备
第三节 磁悬浮铁路的基本设备
第八章 磁悬浮铁路
第一节 磁悬浮铁路的简介
2001年3月1日,上海新闻媒体报道了一条重要的消息:上海磁悬浮列车示范运营线 工程在龙阳路地铁站正式开工建设。该工程西起地铁二号线龙阳路站,东至浦东国际 机场航站楼,全长约30公里,总投资约89亿元人民币,是中国交通建设史上及世界上 第一个商业化运营的磁悬浮列车工程。同年11月2日,时任中共中央政治局常委、国务 院总理朱镕基与时任德国总理施罗德共同为磁悬浮列车营运线轨道梁启运揭幕。2002 年12月31日,上海磁悬浮列车示范运营线运行通车。朱镕基和施罗德又为试运行剪彩 并同乘列车。 巧合的是,磁悬浮列车采用的是德国克虏勃公司生产的列车,而1925年浦东的上 南铁路,也使用的是克虏勃生产的蒸汽机车。
mgr微型直线导轨规格参数解释
mgr微型直线导轨规格参数解释mgr微型直线导轨规格参数解释导轨是一种用于机械设备的运动部件。
它能够提供精准的直线运动,并具有较高的刚度和定位精度。
在工业设备和机械制造领域中,导轨有着广泛的应用。
不同类型的导轨规格参数不同,而本文将详细解释mgr微型直线导轨的规格参数及其重要性。
mgr微型直线导轨是一种非常常见的导轨类型,它适用于需要小空间、高精度和高速运动的应用。
mgr导轨由两个主要部分组成:导轨和导轨块。
导轨是一根直线条,类似于横截面呈“T”字形,而导轨块则是安装在导轨上的滑块。
mgr微型直线导轨具备以下规格参数:1. 导轨长度:mgr微型直线导轨的长度通常是指导轨条的有效行程。
它的值通常以毫米(mm)为单位进行标识。
不同的应用需要不同长度的导轨,因此在选择时需要根据具体需求进行选择。
2. 许可载荷:许可载荷是指导轨在运动中能够承受的最大负荷。
mgr微型直线导轨的许可载荷通常以牛顿(N)为单位进行表示。
许可载荷的大小直接影响到导轨的运动稳定性和寿命,在选择时需要根据实际负载情况进行合理安排。
3. 动态刚度:动态刚度是指导轨在运动中的抗变形能力。
mgr微型直线导轨的动态刚度通常以牛顿/毫米(N/mm)为单位进行表示。
动态刚度与导轨的材质、结构和尺寸等因素相关,影响到导轨在高速运动时的稳定性和精度。
4. 额定速度:额定速度是指导轨在标准工作条件下能够安全运行的最大速度。
mgr微型直线导轨的额定速度通常以毫米/秒(mm/s)为单位进行表示。
额定速度的大小取决于导轨的结构、润滑方式和激振力等因素,在选择时需要根据实际需求进行合理安排。
5. 回程误差:回程误差是指导轨在运动过程中的位置误差。
mgr微型直线导轨的回程误差通常以毫米(mm)为单位进行表示。
回程误差的大小与导轨的精度和结构有关,对于高精度应用来说,需要选择回程误差较小的导轨。
mgr微型直线导轨的规格参数对于其应用的性能和质量至关重要。
在选择和使用mgr导轨时,需要根据实际需求综合考虑这些参数,并根据具体情况进行合理的调整和优化。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电 流,以 改变两侧直线电机动件与定件将的磁拉力,即兼作磁浮导轨的磁浮力,
从而调整两侧对称的磁垫气隙间距。另外一种结构是单独设计磁悬浮导轨,工作
原理与第一种用直线电机兼作线形磁浮导轨近似11 4 3
2 . 4结构优化设计技术
2. . 1工作台设计 4
2 .1直线电 .1 4. 机初、次级工作电 磁吸力对工作台结构的影响
第二章 数控机床进给系统高速化的关键技术
2.磁悬浮导轨 .2 3
磁悬浮导轨是利用磁场力将工作台托起的一种线性磁浮轴承。这种导轨可使
直线电机动件ቤተ መጻሕፍቲ ባይዱ工作台 直线电机定件 光栅
气隙检铡元件
/ / . /
沁
才
仔/ 父不 二 北一 厂一
的变形,直 接影响直线电机初、次级间的间隙。初、次级间的工作间隙又直接影
厂, } 、f 巨
二 厂
床身
图2 利用直线电 - 8 机兼作磁浮线形导 轨典型结构简图
F .8 pa tcroL e a tgiwy eid n r r i amgec ea rleble mts i2 T il te n r ni u g - yc suu f r d s z y o a ia o
工作台脱离床身,工作时与导轨不产生直接接触,因而运动过程中几乎没有摩擦
阻力,这对直接驱动进给系统非常有利。在直接驱动进给系统中,实现磁浮导轨 的的主要方式有两种,一种是将直线电机对称倾斜安装,利用直线电机的工作吸 力在工作台的平衡形成磁浮效应1,如图 28所示。为确保磁浮气隙间的平衡, 3 0 1 - 在气隙间安装一间隙测量传感器,通过间隙测量来反饿控制两侧对称励磁绕组的
为保证系统在整个行程具有恒定的推力和发挥直线电机的额定性能 几要求直 线电 机的初、次级间保持 0 士 . m 的间隙,如图 2 . 0 m 3 1 - 9所示。而当直线电 机通 电后,初、次级间会产生很大的电磁吸力。如前所述,该力与直线电 机初、次级 ( _ 作面积有关,可达到 20Nm 0K /'。如图示的结构,这个力会引 起工作台和导 轨