磁悬浮导轨的开发与研究
磁悬浮导轨上碰撞设计性实验

磁悬浮导轨碰撞设计性实验研究【实验目的】(1)了解磁悬浮的物理思想和永磁悬浮技术;(2)用两个磁悬浮滑块, 设计多种弹性和非弹性碰撞实验;(3)观察系统中物体间的各种形式的碰撞,考察动量守恒定律;(4)观察碰撞过程中系统动能的变化,分析实验中的碰撞是属于那种类型的碰撞【设计要求及实验内容】(1)设计一种相对弹性碰撞;(2)设计一种相对非弹性碰撞;(3)设计一种尾随弹性碰撞;(4)设计一种尾随非弹性碰撞;以上实验需画出发生碰撞试验的示意图。
设计数据记录和处理的表格,表格中必须列入动量增量和动能增量及其相对变化值。
【主要实验器材】(1)DHSY型磁悬浮动力学实验仪(2)DHSY型磁悬浮导轨实验智能测试仪(3)磁悬浮滑块【实验原理、方法提示】1. 磁悬浮原理随着科技的发展,磁悬浮技术的应用成为技术进步的热点,例如磁悬浮列车。
永磁悬浮技术作为一种低耗能的磁悬浮技术,也受到了广泛关注。
本实验使用的永磁悬浮技术,是在磁悬导轨与滑块两组带状磁场的相互斥力作用之下,使磁悬滑块浮起来,从而减少了运动的阻力,来进行多种力学实验。
实验装置如图1所示。
磁悬浮导轨实际上是一个槽轨,长约1.2米,在槽轨底部中心轴线嵌入钕铁硼NdFeB磁钢,在其上方的滑块底部也嵌入磁钢,形成两组带状磁场。
由于磁场极性相反,上下之间产生斥力,滑块处于非平衡状态。
为使滑块悬浮在导轨上运行,采用了槽轨。
在导轨的基板上安装了带有角度刻度的标尺。
根据实验要求,可把导轨设置成不同角度的斜面。
1.手柄2.光电门Ⅰ3.磁浮滑块4.光电门Ⅱ5.导轨6.标尺7.角度尺8.基板 9计时器图5.9.1 磁悬浮实验装置图5.9.2 磁悬浮导轨截面图2.碰撞本实验是在磁悬浮导轨上进行的,提供三辆滑块;一辆滑块是一头装有弹簧;一辆滑块装有粘性尼龙毛,一辆滑块装有粘性尼龙刺。
碰撞装置如图3所示。
设有两物,其质量各为1m 和2m ,碰撞前的速度各为0201υυ和,碰撞后的速度各为1211υυ和而且在碰撞的瞬间,此二物体构成的系统,在所考察的速度方向上不受外力的作用或所受的外力远小于碰撞时物体间的相互作用力,则根据动量守恒定律,系统在碰撞前的总动量等于碰撞后的总动量。
超导磁悬浮列车的研究与开发
超导磁悬浮列车的研究与开发随着科技的不断进步,人们对交通运输的需求也日益增长。
传统的交通方式已经不能满足人们的需求,交通拥堵等问题已经成为困扰城市发展和居民生活的重要难题。
因此,为了解决这些问题,超导磁悬浮列车应运而生。
超导磁悬浮列车是一种颠覆传统交通方式的新型交通工具,它利用超导磁悬浮技术实现悬浮运行,并通过电磁力驱动列车高速行驶。
其研究与开发正在引起越来越多的关注与投入。
超导磁悬浮列车的研究始于20世纪70年代,最早由德国科学家发起。
他们设想通过利用超导材料的磁悬浮效应,可以消除与铁轨的摩擦,并通过磁场产生的电磁力来推动列车行驶,从而实现高速、平稳的运行。
为了实现这一设想,研究人员面临着很多技术难题。
首先是超导材料的研发与应用。
超导材料具有零电阻与完美磁通体现象,可以实现高电流密度和强磁场效应。
然而,超导材料的制备难度较大,成本高昂,且需要极低的温度条件才能保持超导状态。
因此,寻找符合工程应用要求的超导材料成为超导磁悬浮列车研究的关键。
其次是磁悬浮系统的设计与优化。
超导磁悬浮列车通过利用磁铁在轨道上产生的磁场与超导磁体内的电流相互作用,实现浮起与推进效果。
因此,磁铁与超导磁体的设计是至关重要。
研究人员需要通过合理的轨道与磁铁配置,以及超导磁体的高效制冷与绝缘等手段来保证列车的稳定运行。
此外,超导磁悬浮列车的动力系统也是研究的重点之一。
动力系统需要提供足够的力量驱动列车高速行驶。
传统的动力系统往往采用燃料作为能源,而超导磁悬浮列车则采用电磁力来驱动,需要设备更为精密的控制系统来实现动力的精确控制。
除了技术挑战,超导磁悬浮列车的开发还需要克服政策、经济和社会等多方面的问题。
政策支持与资金投入是推动超导磁悬浮列车研究与开发的关键。
政府应该积极制定相关政策,提供资金支持,引导企业与科研机构加大研发投入,形成合力推进超导磁悬浮列车的实际应用。
同时,超导磁悬浮列车的建设与运营也需要充分考虑经济效益和社会影响。
高速列车磁悬浮控制技术研究与实现

高速列车磁悬浮控制技术研究与实现随着科技的不断发展和人们对高速交通的需求增加,高速列车成为现代交通的重要组成部分。
而磁悬浮技术作为一种利用电磁原理来使列车悬浮运行的技术,在高速列车领域发挥着重要的作用。
本文将就高速列车磁悬浮控制技术的研究与实现进行探讨。
首先,高速列车磁悬浮控制技术的研究意义和发展现状需要被深入了解。
高速列车磁悬浮技术的应用可以大大提高列车的运行速度和安全性。
与传统的轮轨接触方式不同,磁悬浮技术使列车完全脱离轨道,减少了摩擦和磨损,可以实现更高的行驶速度和更平稳的运行。
目前,世界上已有多个国家在高速列车磁悬浮技术领域展开研究,例如中国的上海磁悬浮列车、日本的JR磁浮交通系统等。
其次,高速列车磁悬浮控制技术的核心是磁悬浮悬浮和导引控制系统。
磁悬浮悬浮系统通过对列车底部的电磁感应进行调节,使列车的悬浮高度保持在一个稳定的范围内。
而导引控制系统则通过对列车上部的磁体进行调节,引导列车在轨道上行驶。
磁悬浮悬浮和导引控制系统的设计和实现需要考虑多个因素,如列车的负载、运行速度、环境变化等。
通过优化控制算法和系统设计,可以提高列车的运行效率和稳定性。
然后,高速列车磁悬浮控制技术的实现需要依赖于先进的控制和监测系统。
控制系统通过实时监测列车的位置、速度、荷载等信息,对电磁悬浮和导引控制系统进行调节和控制。
同时,监测系统可以实时采集车体的振动、温度、应力等数据,对列车的运行状态进行监测和预警。
为了实现高速列车磁悬浮技术的稳定运行,控制和监测系统需要具备高精度、高灵敏度和高可靠性。
接下来,高速列车磁悬浮控制技术研究过程中需要重点关注的问题需要被重视。
首先是列车与轨道之间的交互作用问题,磁悬浮列车在高速行驶中与轨道之间存在复杂的电磁相互作用,这对磁悬浮控制系统的设计和运行提出了挑战。
其次是环境适应性问题,高速列车的运行环境常常面临多变的气候和地形条件,如何针对不同的环境因素优化磁悬浮控制系统是亟待解决的问题。
实验3磁悬浮实验
实验3 磁悬浮实验
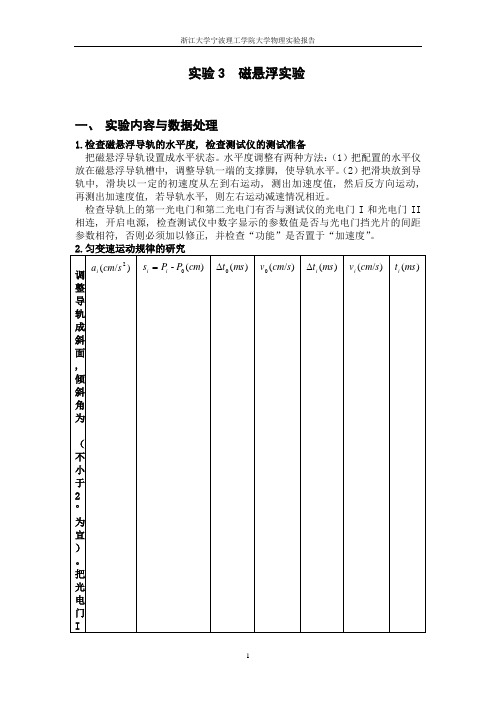
一、实验内容与数据处理
1.检查磁悬浮导轨的水平度, 检查测试仪的测试准备
把磁悬浮导轨设置成水平状态。
水平度调整有两种方法:(1)把配置的水平仪放在磁悬浮导轨槽中, 调整导轨一端的支撑脚, 使导轨水平。
(2)把滑块放到导轨中, 滑块以一定的初速度从左到右运动, 测出加速度值, 然后反方向运动, 再测出加速度值, 若导轨水平, 则左右运动减速情况相近。
检查导轨上的第一光电门和第二光电门有否与测试仪的光电门I和光电门II 相连, 开启电源, 检查测试仪中数字显示的参数值是否与光电门挡光片的间距参数相符, 否则必须加以修正, 并检查“功能”是否置于“加速度”。
以i s 为横坐标2i v 为纵坐标作图。
3.重力加速度g 的测量
两光电门之间距离固定为s 。
改变斜面倾斜角 , 滑块每次由同一位置滑下, 依次经过两个光电门, 记录其加速度 。
i
)/(20s cm a i )/(2s cm a i i θsin 1
52.72 51.68 6.8/120 2 44.84 43.80 6/120 3 36.98 35.94 5/120 4 28.63 27.59 4/120 5
21.10
20.06
3/120
(1)根据g=
θ
sin a
,分别算出每个倾斜角度下的重力加速度g ;
g=10m/2
s
计算测得的重力加速度的平均值 , 与本地区公认值 相比较, 求出
%100||⨯-=标
标g g g E g =2.04%
二、分析与讨论
1.实验做完后, 磁浮滑块不可长时间放在导轨中, 防止滑轮被磁化。
新型磁悬浮轨道梁剪力连接件研究的开题报告

新型磁悬浮轨道梁剪力连接件研究的开题报告一、研究背景随着城市化进程的加快,城市交通问题日益凸显。
传统的铁路交通方式逐渐难以满足人们的需求,磁悬浮车辆因其高速、低噪音、无震动等优点成为一种理想的交通方式。
磁悬浮列车是通过磁悬浮技术,通过靠近轨道的车体加上磁力来悬浮在轨道上,避免了与轨道直接接触的情况,因此摩擦力和阻力较小,运行速度可以高达每小时500公里以上,是目前世界上运行速度最快的交通工具之一。
磁悬浮轨道的建设是一个庞大的工程,需要考虑轨道连接方式的设计优化。
由于磁悬浮列车的运行速度较快,因此选用高强度连接件是必不可少的。
目前磁悬浮轨道连接件主要选用梁式剪力连接件,但是传统的梁式剪力连接件存在许多缺陷,例如其结构简化度不高、承载能力有限等。
二、研究目的本研究旨在针对目前磁悬浮轨道连接件存在的问题,开发一种新型的磁悬浮轨道梁剪力连接件,通过结构优化和材料优化等手段改进其性能,提高其承载能力和耐久性,以确保磁悬浮轨道连接件的稳定性和安全性。
三、研究内容1.分析传统梁式剪力连接件的缺陷,并提出一种更优化的结构设计。
2.设计合适的材料,并进行材料优化,以提高其耐久性和承载能力。
3.进行数值分析,包括有限元分析和模拟实验,验证新型梁剪力连接件的性能。
4.通过对比实验,验证新型梁剪力连接件的优越性和可行性。
四、研究意义研究新型磁悬浮轨道梁剪力连接件的结构设计和材料优化,可以提高连接件的承载能力和耐久性,从而增强连接件的稳定性和安全性,保障磁悬浮轨道的正常运行。
此外,研究成果也可以为轨道交通领域的工程设计提供参考,促进中国城市轨道交通事业的发展。
大学磁悬浮实验报告

1. 了解磁悬浮列车的原理和结构。
2. 通过实验演示磁悬浮现象,验证超导体对永磁体的排斥作用。
3. 掌握磁悬浮列车的运行机制和影响因素。
二、实验原理磁悬浮列车利用超导体在低温下的特性,实现列车与轨道之间的无接触悬浮。
当超导体冷却至一定温度时,其电阻降为零,形成超导态。
此时,超导体内的电流产生强大的磁场,与轨道上的永磁体相互作用,产生排斥力,使列车悬浮于轨道之上。
三、实验器材1. 超导磁悬浮列车演示仪(含磁导轨支架、磁导轨)2. 高温超导体(含Ag的YBacuo系高温超导体)3. 液氮四、实验步骤1. 将超导磁悬浮列车演示仪放置在平稳的工作台上。
2. 使用液氮将高温超导体冷却至临界温度(约90K)。
3. 将冷却后的高温超导体放置在磁导轨上,确保其与轨道平行。
4. 打开电源,使磁导轨产生磁场。
5. 观察高温超导体在磁场中的悬浮状态。
五、实验结果与分析1. 当高温超导体冷却至临界温度时,其在磁场中悬浮,证实了超导体对永磁体的排斥作用。
2. 通过调整磁导轨的磁场强度,可以观察到悬浮高度的变化。
当磁场强度增大时,悬浮高度也随之增大。
3. 实验过程中,高温超导体在磁场中的悬浮稳定性较好,但受到外界温度、磁场强度等因素的影响。
1. 磁悬浮列车利用超导体在低温下的特性,实现列车与轨道之间的无接触悬浮。
2. 超导体对永磁体的排斥作用是实现磁悬浮的关键因素。
3. 磁悬浮列车的悬浮高度和稳定性受到外界因素的影响。
七、实验注意事项1. 实验过程中,操作人员需穿戴防护用品,如手套、护目镜等。
2. 使用液氮时,注意防止泄漏和低温冻伤。
3. 调整磁导轨磁场强度时,需缓慢进行,避免对高温超导体造成损伤。
八、思考题1. 磁悬浮列车在实际应用中,如何解决高温超导体冷却问题?2. 磁悬浮列车在高速运行时,如何保证其稳定性和安全性?3. 除了磁悬浮技术,还有哪些新型高速轨道交通技术?九、实验总结本次磁悬浮实验成功演示了超导体对永磁体的排斥作用,验证了磁悬浮列车的原理。
高速列车磁悬浮技术的研究与应用

高速列车磁悬浮技术的研究与应用近年来,高速列车成为了城市发展的一个重要标志,也是人们追求快速出行的必备工具。
在高速铁路建设中,磁悬浮技术逐渐得到应用,并成为了发展重点。
下面,本文从历史背景、技术原理以及发展前景三个方面,对高速列车磁悬浮技术进行阐述。
一、历史背景高速列车磁悬浮历史可以追溯到20世纪60年代初,当时美国的磁悬浮技术已经成熟,并开始应用于城市轨道交通领域。
但由于技术难度大、投入巨大等问题影响,磁悬浮技术的研究和应用在60年代至90年代几乎停滞不前。
1997年,上海开始投资建设磁悬浮列车,中国磁悬浮技术得以重新崛起。
随着技术的进步和改善,2002年,上海成功研制出了时速430公里的世界上最快的商业化磁悬浮列车——磁浮列车。
此后,中国开始加快高速铁路的发展速度,磁悬浮技术也逐渐得到完善和推广,至今,中国已成为全球磁悬浮列车的技术和资产的拥有国家。
二、技术原理磁悬浮列车是一种磁悬浮式铁路交通方式,是利用高强度电磁场驱动列车行驶的交通工具。
其技术原理是利用列车和轨道间的磁力排斥和吸引,使列车悬浮在轨道上行驶。
具体来说,磁悬浮列车的轨道上铺设有一系列电磁铁,同时在列车底部也装有电磁铁。
通过对轨道上的电磁铁和列车底部的电磁铁电流的控制,可使车体既悬浮在轨道上,又向前滑行。
磁悬浮列车的行驶速度可以达到每小时600公里以上,能够替代飞机在500公里以内的航程,运营成本低,环保减排,占用土地面积小等优势,逐渐成为人们出行的首选方式。
三、发展前景随着技术的不断改善和全球高铁的发展趋势,磁悬浮列车将有望在未来得到广泛应用。
目前,中国已在上海、长沙、青岛等城市建设了磁悬浮列车,而自主研发的长兴岛磁浮列车不仅速度快,同时在环保降噪方面也具备卓越的表现。
在未来,磁悬浮列车将成为城际快速轨道交通的重要组成部分,有望在世界范围内推广。
随着更多国家和地区参与到高速铁路建设中来,磁悬浮技术的发展势头将会越来越强劲,未来必将成为高速铁路建设的重要趋势,为乘客提供更加高效、快捷、安全、舒适的出行方式。
永磁电磁悬浮技术研究报告
永磁电磁悬浮技术研究报告永磁电磁悬浮技术研究报告摘要:本研究报告对永磁电磁悬浮技术的发展历程、原理和应用进行了综合研究和分析。
通过对永磁电磁悬浮技术的核心理论和实际应用进行剖析,探讨了其在交通运输、能源以及医疗设备等领域的应用前景,并提出了进一步研究的建议。
一、引言永磁电磁悬浮技术作为一项新兴的悬浮技术,具有重要的科研和工程应用价值。
本研究报告旨在通过对永磁电磁悬浮技术发展的概述,深入分析其原理和应用案例,为相关研究人员和工程师提供技术参考和指导。
二、永磁电磁悬浮技术发展历程永磁电磁悬浮技术起源于20世纪初的欧洲和美国,经过多年的发展,取得了显著的研究成果。
最早期的研究集中在永磁悬浮的原理和稳定性方面,随着电子技术的发展和特殊材料的应用,悬浮系统的性能不断提高,使得永磁电磁悬浮技术得以进一步应用于实际工程中。
三、永磁电磁悬浮技术原理永磁电磁悬浮技术是通过利用永磁材料产生的恒定磁力和电流感应力的相互作用,实现物体在无接触的状态下悬浮于空中。
该技术的核心概念是利用永磁体提供持续的磁场,通过悬浮电流和磁力的相互作用来实现悬浮。
四、永磁电磁悬浮技术应用案例4.1 交通运输领域永磁电磁悬浮技术可应用于高速列车和轻型磁悬浮系统的研究和建设。
以中国的“复兴号”高速列车为例,其采用了永磁电磁悬浮技术,实现了列车的平稳悬浮和高速运行。
这种先进的技术不仅提高了列车的运行速度和安全性,还减小了对轨道和环境的损害,并为未来城市交通发展提供了新思路。
4.2 能源领域永磁电磁悬浮技术在能源领域的应用主要体现在发电机组的研究和设计中。
通过利用永磁电磁悬浮技术,可以减少机组的摩擦和能量损耗,提高能源转换效率。
此外,该技术还可以应用于风力发电装置的悬浮部分,提高风轮的稳定性和风能利用效率。
4.3 医疗设备领域永磁电磁悬浮技术在医疗设备领域的应用主要体现在医用图像诊断设备和手术器械的研发和应用中。
通过引入永磁电磁悬浮技术,可以实现对医疗设备的高精度定位和稳定悬浮,提高手术的准确性和安全性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
态垂直跳动小于 1μm ,静态水平跳动小于 0. 5μm ,
承载力达 :1 080N 。
图 5 6 自由度磁悬浮导轨
图 4 算法结构图
对应的增量算式 :
ud ( n) = a1 ud ( n - 1) + a2 e ( n) + a3 e ( n - 1)
ut ( n) = ui ( n - 1) + a4 ud ( n)
软件设计包括系统初始化 、控制算法以及特殊 状况 (如溢出 、掉电等) 处理 。以 TMS320F240 为 例 ,它有 3 种寻址方式 、86 条基本指令 ,二者组合 可多达 200 多条有效指令 ,通常的做法是程序核心 部分 (即经常调用部分) 采用汇编语言编写 ,以提高 整个系统的执行效率 ,对实时性要求不高的部分采 用 C 语言编写以降低程序的复杂度 ,并提高可读 性和可修改性 。
下面结合 TI 公司的 TMS320C240 芯片 ,介绍 如何利用 PWM 技术来控制大功率六自由度磁悬 浮导轨 。
1 系统组成
用 TMS320C240 中 PWM1 ~ PWM6 , PWM7 ~PWM8 作为 4 个自由度的 PWM 信号输入 ,另两 个自由度用 T1PWM 、T2PWM 和 PWM9 、T3PWM 来实现 。这样共 12 路 PWM 信号去控制半桥驱动 电路 。TMS320F240 根据位移及智能 PID 输出结
· 127 ·
·电气技术与自动化· 张建生 ,等·磁悬浮导轨的开发与研究
TMS320F2407 具 有 下 述 特 点 : 1 ) 主 频 为 20M Hz ,单指令周期为 50ns ,且大部分指令在一个 机器周期内完成 ;2) 该芯片集成了 2 个 8 选 1 的 10 位 A/ D 转换器 ,最小转换时间为 6. 1μs ;3) 具有 6 个完全比较单元可用于多达 12 路 PWM 脉冲输 出 ; 4 ) 带 有 16 K 的 Flash ROM 和 544 字 的 DARAM ;5) 集成 PLL 时钟 、Watchdog 、EV 事件管 理器等电路 ;6) 片内 SCI、SPI 等外设接口 。
2 互补式 PWM 原理
a) PWM 的电流波形分析 对于 PWM 输出 ,设调制波的周期为 T , 脉宽 为 t p 当负载的时间常数 t 远大于调制波的周期为 T 时 , 输出电流充放电的波形近似为三角波 ,如图 2 所示 。
图 2 输出电流充放电的波形
其中输出电流波形可看作由 i1 和 i2 两部分组成 :
3 智能 PID 的应用
在 DSP 控制系统中 ,应用 PID 只是将模拟控 制转换成数字控制的第一步 ,由于参数主导型的临 界转速在很大程度上决定于 PID 参数 ,所以要突 破临界转速必需从实时改变 PID 参数着手 ,即采 用智能 PID 控制 。
311 多层前向网络
智能 PID 控制的具体方法很多 ,根据 6 自由度 的磁悬浮控制特点采用神经网络智能 PID 效果较 好。基于多层前向网络的 PID 结构如图 3 所示。
tp =
T 2
+Δt
代入式 (7) 得 :
i1
=
1 T
(
I0
+
T 2
·2 E
RL
-
2RLEΔt)
=
1 T
(
I′0
-
2RLEΔt)
(9)
i2
=
1 T
(
I0
+
T 2
·2 E
RL
+ 2RLEΔt)
=
1 T
(
I′0 +
2RLEΔt)
(10) 符合式 (7) 和式 (8) 。因此只要对 PWM1~ PWM6 的数字比较器设置 ,就可以实现 3 个自由度的输出 控制 。由于目前的 DSP 都未超过 6 个全功能互补 的 PWM ,故对于 6 自由度的磁悬浮控制系统另两 个自 由 度 分 别 由 PWM7 、PWM8 及 T1PWM 、 T2PWM 和 PWM9 、T3PWM 来实现 。由于这六个 PWM 的比较器独立而不互补 ,故可利用上述的计 算 结 果 分 别 对 CMP7 、CMP8 、CMP9 、T1CMP 、 T2CMP 和 T3CMP 进行设置和控制即可 。
4 实验结果
对 6 自由度 1 000N 的磁悬浮导轨系统做了实
验(图 5)
,其参数如下 :4 个垂直线圈偏磁电流
I
′ 10
=
I2′0 =
I
′ 30
=
I
′ 40
=
3A
,平衡气隙
0.
10mm
,水平
线圈偏磁电流
I
′ 50
=
I
′ 60
=
4A
,平衡气隙
0
.
10mm
,
悬浮体 (平衡板) 的质量为 m = 80kg ,对应的位移
i
=
1 T
[
ห้องสมุดไป่ตู้
I0
+2
E RL
t
p
+
L RL
(Δ I
-
I
+
E) RI
e-
RL L
t
p
+
(4)
L RL
(Δ I
+
I
-
E) RI
e-
RL L
t
p
]
这里 I0 为所有与 t p 无关的常数项之和 。上电
并在过渡过程完成后 :
i0 ( t p) - i1 (0) ≈ i2 ( T) - i2 ( t p)
· 128 ·
http :// ZZHD. chinajournal. net. cn E2mail : ZZHD @chinajournal. net. cn 《机械制造与自动化》
·电气技术与自动化· 张建生 ,等·磁悬浮导轨的开发与研究
图 3 神经网络智能 PID 示意图
控制器网络 NNC 采用二层网络 ,用单神经元 实现 ;辩识器网络 NN I 采用三层网络 ,用 BP 网络 实现 。由于采用了多步控制策略 ,扩大了反映动态 变化的有用信息 ,可以做到实时地改变 P 、I、D 参 数 ,提高了系统的稳定性和刚度 。
The Research of Guide Supported with AMB ZHAN G J ian2sheng1 ,2 ,ZHAN G Gang1 ,WU Guo2qing1 ,3 ,WAN G Xi2ping1 ,WU Ming2gui1
(1. Shanghai University , Shanghai 200072 , China ; 2. Changzhou Instit ute of Technology , J S Changzhou 213003 , China ;
0 引言
对于磁悬浮导轨的控制系统中 ,由于存在超静 定位的问题 ,模拟系统或模拟控制加开关功放 。已 很难做到理想的控制效果 ,这是因为模拟系统不能 实时地改变 PID 参数 , PID 参数决定了系统的稳 定裕量 ,而再好的系统其稳定域总是有限的 。因此 用高速数据处理器 TMS320C240 可以通过改变 PID 参数的办法可解决超静定位的问题 ,最终达到 高速运行的目的 。
M achi ne B uil di ng & A utom ation , Dec 2004 , 33 ( 6) : 127~ 129 , 130
果调用 PWM 波算法程序 ,控制 PWM 输出 ,从而 使系统保持平衡 ,如图 1 所示 。
图 1 DSP 为核心的 6 自由度控制器
通常 PWM 信号送入隔离驱动模块 ,有利于减 小功率模块对前级的干扰并提高可靠性 。
i1 = I0 +ΔI
(7)
i2 = I0 - ΔI
(8)
i1 为上线圈电流 , i2 为下线圈电流 。
设上线圈的脉宽为 tp , 根据 TMS320C240 的
6 个全功能数字式 PWM 互补性的原理 ,对数字比
较器设置时取 : t p
=
T 2
- Δt 。由 PWM 互补性的
原理得 : tq = 1 -
312 单通道的算法
利用 TMS320C240 的快速性特点 ,全部由软 件来产生互补 PWM 的脉冲信号 ,这样比起硬件比 较来实现互补 PWM 的控制在控制上要方便得多 , 做到了真正的数控 。同样利用 TMS320C240 的快 速性特点实现末级驱动的软开关效果大大地提高 了驱动的可靠性 。
刚度系数为 C1 = 16. 544 7 ×104N/ m ,电流刚度系
数为 C2 = 267. 325 0N/ A ,功率放大器 Gp ( s) =
Ka = 0. 8A/ V ,电涡流位移传感器 Gs ( s) = Ks =
6 000 ,取采样周期 T = 0. 000 2s ,静态时控制参数
Kp = 0. 6 , Kd = 120 , Ti = 0. 02s , T d = 0. 03s 。静
(5)
ΔI 可由式 (5) 确定 。
一般电磁轴承的线圈内阻很小 ,对于 220V 供
电的开关功率放大器 :
E RL
ΔI , 故式 (4) 可近似
为:
i
=
1 T
[
2
E RL
t
p
+
I0 ]
(6)
b) 互补式 PWM 的算法
在一个自由度上 ,两个线圈的静态电流相同 ,
控制输出信号为差动的关系 。要满足 :
3. Nantong Instit ute of Technology , J S Nantong 226007 , China) Abstract :The twelve digital PWM of TMS320C240 in DSP product s are very convenient to cont rol t he six f reedoms guide supported wit h AMB. This paper briefly int roduces t he basic st ruct ure and character of t he chip , t he principle of using PWM wave and t he main cont rol circuit of t he system of t he guide and discusses how to achieve t he PWM and PID wave by program. Key words :DSP ; PWM ;motorized spindle supported wit h AMB ;switching powerf ul amplifier