自动控制理论复习资料(英文版)
自动控制原理(中英文)
自动控制原理(中英文)《自动控制原理》课程教学大纲课程编号:2020161课程类别:必修授课对象:本科三年级先修课程:复变函数,积分变换,信号与系统。
学分:4总学时:56 课内学时:48实验学时: 8一、课程性质、教学目得与任务课程性质:专业基础课,专业知识链条中得关键环节之一,自动控制原理就是仪器仪表类、测控类专业得重要基础课之一,这些专业主要学习信号传感(获取)、信号处理、控制及光机电系统等知识,而控制就是知识链条中得重要一环,随着科技发展,自动化、智能化已成为仪器、产品、系统等得重要功能,这就要求学生必须具备自动控制方面得知识。
教学目得与任务:培养学生自动控制原理得基础知识,学习掌握经典控制得基本理论、基本方法与控制系统得基本设计方法,重点学习分析与设计线性控制系统得基本理论、基本方法及控制系统设计方法.主要内容包括:控制系统得数学模型、控制系统得时域分析法、控制系统得根轨迹法、控制系统得频域分析法、控制系统得常用校正方法等。
二、教学基本要求学习经典控制得基本理论与基本方法,重点学习分析与设计线性控制系统得基本理论与基本方法。
主要内容包括:控制系统得数学模型、控制系统得时域分析法、控制系统得根轨迹法、控制系统得频域分析法、控制系统得常用校正方法等。
三、教学内容第一章控制系统得一般要概念 (4课时)自动控制得基本原理与方式,自动控制系统示例,自动控制系统得分类,对自动控制系统得基本要求1、基本概念;2、反馈系统基本组成;3、基本控制方式;4、控制系统分类:开环、闭环、复合控制;第二章控制系统得数学模型 (8课时)控制系统得时域数学模型,拉普拉斯变换,控制系统得复域数学模型,控制系统得状态空间模型,控制系统得结构图与信号流图2-1时域模型、微分方程表示方法;2-2 复域模型1、传递函数得定义与性质;2、传递函数得零、极点表示,开环增益、根轨迹增益等;3、典型环节得传递函数(比例、惯性、微分、积分、振荡);2-3 控制系统得结构图与信号流图1、结构图得等效变换与化简2、信号流图组成与性质A.性质、术语(理解)B。
自动控制理论(双语)
G2
R(s)
C(s)
R(s)
C(s)
R(s)
G1 G2
G 1 +G 2
G1 1+G1G2
C(s)
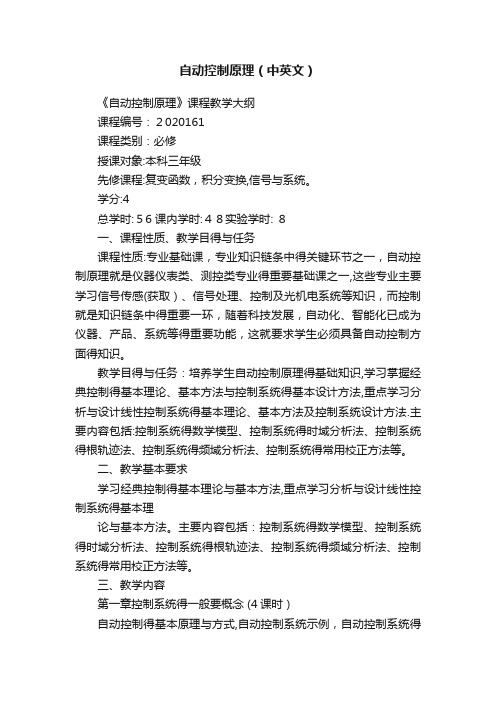
R(s): Input G1: Forward path C(s): Output G2: Feedback path E(s): Error B(s): Feed back G1G2: Open-loop
G(s)
G(s)
2.7 Signal-Flow Graph Models
Example 2.22
R(s) E(s)
- G1 H1
X
-
1
G2 H2
H3
-
X
2
G3
X3
C(s)
G4
R(s)
1
E(s) G1
X1
G2 X2 G3
-H1 X3 G4 C(s)
-H2
-H3
2.7 Signal-Flow Graph Models
2.6.2.1 Basic forms of the block diagrams of control systems Three basic forms cascade
R(s)
parallel
R(s)
feedback
C(s) R(s)
G1
G2
C(s)
G1 G2
+
E(s) G 1 B(s)
C(s)
G
2.6 block diagram models (dynamic)
3. Interchanging the neighboring— Summing points x1
-
x3 + y x2
自动控制原理英文版课后全部_答案

Module3Problem 3.1(a) When the input variable is the force F. The input variable F and the output variable y are related by the equation obtained by equating the moment on the stick:2.233y dylF lk c l dt=+Taking Laplace transforms, assuming initial conditions to be zero,433k F Y csY =+leading to the transfer function31(4)Y k F c k s=+ where the time constant τ is given by4c kτ=(b) When F = 0The input variable is x, the displacement of the top point of the upper spring. The input variable x and the output variable y are related by the equation obtained by the moment on the stick:2().2333y y dy k x l kl c l dt-=+Taking Laplace transforms, assuming initial conditions to be zero,3(24)kX k cs Y =+leading to the transfer function321(2)Y X c k s=+ where the time constant τ is given by2c kτ=Problem 3.2 P 54Determine the output of the open-loop systemG(s) = 1asT+to the inputr(t) = tSketch both input and output as functions of time, and determine the steady-state error between the input and output. Compare the result with that given by Fig3.7 . Solution :While the input r(t) = t , use Laplace transforms, Input r(s)=21sOutput c(s) = r(s) G(s) = 2(1)aTs s ⋅+ = 211T T a s s Ts ⎛⎫ ⎪-+ ⎪ ⎪+⎝⎭the time-domain response becomes c(t) = ()1t Tat aT e ---Problem 3.33.3 The massless bar shown in Fig.P3.3 has been displaced a distance 0x and is subjected to a unit impulse δ in the direction shown. Find the response of the system for t>0 and sketch the result as a function of time. Confirm the steady-state response using the final-value theorem. Solution :The equation obtained by equating the force:00()kx cxt δ+=Taking Laplace transforms, assuming initial condition to be zero,K 0X +Cs 0X =1leading to the transfer function()XF s =1K Cs +=1C1K s C+The time-domain response becomesx(t)=1CC tK e -The steady-state response using the final-value theorem:lim ()t x t →∞=0lim s →s 1K Cs +1s =1K00000()()()1;11111()K t CK x x Cx t Kx X K Cs Kx Kx X C Cs K K s KKx x t eCδ-++=⇒++=--∴==⋅++-=⋅According to the final-value theorem:0001lim ()lim lim 01t s s Kx sx t s X C K s K→∞→→-=⋅=⋅=+ Problem 3.4 Solution:1.If the input is a unit step, then1()R s s=()()11R s C s sτ−−−→−−−→+ leading to,1()(1)C s s sτ=+taking the inverse Laplace transform gives,()1tc t e τ-=-as the steady-state output is said to have been achieved once it is within 1% of the final value, we can solute ―t‖ like this,()199%1tc t e τ-=-=⨯ (the final value is 1) hence,0.014.60546.05te t sττ-==⨯=(the time constant τ=10s)2.the numerical value of the numerator of the transfer function doesn’t affect the answer. See this equation, If ()()()1C s AG s R s sτ==+ then()(1)A C s s sτ=+giving the time-domain response()(1)tc t A e τ-=-as the final value is A, the steady-state output is achieved when,()(1)99%tc t A e A τ-=-=⨯solute the equation, t=4.605τ=46.05sthe result make no different from that above, so we said that the numerical value of the numerator of the transfer function doesn’t affect the answer.If a<1, as the time increase, the two lines won`t cross. In the steady state the output lags the input by a time by more than the time constant T. The steady error will be negative infinite.R(t)C(t)Fig 3.7 tR(t)C(t)tIf a=1, as the time increase, the two lines will be parallel. It is as same as Fig 3.7.R(t)C(t)tIf a>1, as the time increase, the two lines will cross. In the steady state the output lags the input by a time by less than the time constant T.The steady error will be positive infinite.Problem 3.5 Solution: R(s)=261s s+, Y(s)=26(51)s s s +⋅+=229614551s s s -+++ /5()62929t y t t e -∴=-+so the steady-state error is 29(-30). To conform the result:5lim ()lim(62929);tt t y t t -→∞→∞=-+=∞6lim ()lim ()lim ()lim(51)t s s s s y t y s Y s s s →∞→→→+====∞+.20lim ()lim ()lim [()()]161lim [()1]()lim (1)()5130ss t s s s s e e t S E S S Y S R S S G S R S S S S S→∞→→→→==⋅=⋅-=⋅-=⋅-⋅++=- Therefore, the solution is basically correct.Problem 3.623yy x += since input is of constant amplitude and variable frequency , it can be represented as:j tX eA ω=as we know ,the output should be a sinusoidal signal with the same frequency of the input ,it can also be represented as:R(t)C(t)t0j t y y e ω=hence23j tj tj tj yyeeeA ωωωω+=00132j y Aω=+ 0294Ayω=+ 2tan3w ϕ=- Its DC(w→0) value is 003Ay ω==Requirement 01122w yy==21123294AA ω=⨯+ →32w = while phase lag of the input:1tan 14πϕ-=-=-Problem 3.7One definition of the bandwidth of a system is the frequency range over which the amplitude of the output signal is greater than 70% of the input signal amplitude when a system is subjected to a harmonic input. Find a relationship between the bandwidth and the time constant of a first-order system. What is the phase angle at the bandwidth frequency ? Solution :From the equation 3.41000.71r A r ωτ22=≥+ (1)and ω≥0 (2) so 1.020ωτ≤≤so the bandwidth 1.02B ωτ=from the equation 3.43the phase angle 110tan tan 1.024c πωτ--∠=-=-=Problem 3.8 3.8 SolutionAccording to generalized transfer function of First-Order Feedback Systems11C KG K RKGHK sτ==+++the steady state of the output of this system is 2.5V .∴if s →0, 2.51104C R→=. From this ,we can get the value of K, that is 13K =.Since we know that the step input is 10V , taking Laplace transforms,the input is 10S.Then the output is followed1103()113C s S s τ=⨯++Taking reverse Laplace transforms,4/4332.5 2.5 2.5(1)t t C e eττ--=-=-From the figure, we can see that when the time reached 3s,the value of output is 86% of the steady state. So we can know34823(2)*4393τττ-=-⇒-=-⇒=, 4/3310.8642t t e ττ-=-=⇒=The transfer function is3128s +146s+Let 12+8s=0, we can get the pole, that is 1.5s =-2/3- Problem 3.9 Page 55 Solution:The transfer function can be represented,()()()()()()()o o m i m i v s v s v s G s v s v s v s ==⋅While,()1()111//()()11//o m m i v s v s sRCR v s sC sC v s R R sC sC =+⎛⎫+ ⎪⎝⎭=⎡⎤⎛⎫++ ⎪⎢⎥⎝⎭⎣⎦Leading to the final transfer function,21()13()G s sRC sRC =++ And the reason:the second simple lag compensation network can be regarded as the load of the first one, and according to Load Effect , the load affects the primary relationship; so the transfer function of the comb ination doesn’t equal the product of the two individual lag transfer functio nModule4Problem4.14.1The closed-loop transfer function is10(6)102(6)101610S S S S C RS s +++++==Comparing with the generalized second-order system,we getProblem4.34.3Considering the spring rise x and the mass rise y. Using Newton ’s second law of motion..()()d x y m y K x y c dt-=-+Taking Laplace transforms, assuming zero initial conditions2mYs KX KY csX csY =-+-resulting in the transfer funcition where2Y cs K X ms cs K +=++ And521.26*10cmkc ζ== Problem4.4 Solution:The closed-loop transfer function is210263101011n n d n W EW E W W E ====-=2121212K C K S S K R S S K S S ∙+==+++∙+Comparing the closed-loop transfer function with the generalized form,2222n n nCR s s ωξωω=++ it is seen that2n K ω= And that22n ξω= ; 1Kξ=The percentage overshoot is therefore21100PO eξπξ--=11100k keπ-∙-=Where 10%PO ≤When solved, gives 1.2K ≤(2.86)When K takes the value 1.2, the poles of the system are given by22 1.20s s ++=Which gives10.45s j =-±±s=-1 1.36jProblem4.5ReIm0.45-0.45-14.5 A unity-feedback control system has the forward-path transfer functionG (s) =10)S(s K+Find the closed-loop transfer function, and develop expressions for the damping ratio And damped natural frequency in term of K Plot the closed-loop poles on the complex Plane for K = 0,10,25,50,100.For each value of K calculate the corresponding damping ratio and damped natural frequency. What conclusions can you draw from the plot?Solution: Substitute G(s)=(10)K s s + into the feedback formula : Φ(s)=()1()G S HG S +.And in unitfeedback system H=1. Result in: Φ(s)=210Ks s K++ So the damped natural frequencyn ω=K ,damping ratio ζ=102k =5k.The characteristic equation is 2s +10S+K=0. When K ≤25,s=525K -±-; While K>25,s=525i K -±-; The value ofn ω and ζ corresponding to K are listed as follows.K 0 10 25 50 100 Pole 1 1S 0 515-+ -5 -5+5i 553i -+Pole 2 2S -10 515-- -5 -5-5i553i --n ω 010 5 52 10 ζ ∞2.51 0.5 0.5Plot the complex plane for each value of K:We can conclude from the plot.When k ≤25,poles distribute on the real axis. The smaller value of K is, the farther poles is away from point –5. The larger value of K is, the nearer poles is away from point –5.When k>25,poles distribute away from the real axis. The smaller value of K is, the further (nearer) poles is away from point –5. The larger value of K is, the nearer (farther) poles is away from point –5.And all the poles distribute on a line parallels imaginary axis, intersect real axis on the pole –5.Problem4.61tb b R L C b o v dv i i i i v dt C R L dt=++=++⎰Taking Laplace transforms, assuming zero initial conditions, reduces this equation to011b I Cs V R Ls ⎛⎫=++ ⎪⎝⎭20b V RLs I Ls R RLCs =++ Since the input is a constant current i 0, so01I s=then,()2b RLC s V Ls R RLCs==++ Applying the final-value theorem yields ()()0lim lim 0t s c t sC s →∞→==indicating that the steady-state voltage across the capacitor C eventually reaches the zero ,resulting in full error.Problem4.74.7 Prove that for an underdamped second-order system subject to a step input, thepercentage overshoot above the steady-state output is a function only of the damping ratio .Fig .4.7SolutionThe output can be given by222222()(2)21()(1)n n n n n n C s s s s s s s ωζωωζωζωωζ=+++=-++- (1)the damped natural frequencyd ω can be defined asd ω=21n ωζ- (2)substituting above results in22221()()()n n n d n d s C s s s s ζωζωζωωζωω+=--++++ (3) taking the inverse transform yields22()1sin()11tan n t d e c t t where ζωωφζζφζ-=-+--=(4)the maximum output is22()1sin()11n t p d p p d n e c t t t ζωωφζππωωζ-=-+-==-(5)so the maximum is2/1()1p c t eπζζ--=+the percentage overshoot is therefore2/1100PO eπζζ--=Problem4.8 Solution to 4.8:Considering the mass m displaced a distance x from its equilibrium position, the free-body diagram of the mass will be as shown as follows.aP cdx kxkxmUsing Newton ’s second law of motion,22p k x c x mx m x c x k x p--=++=Taking Laplace transforms, assuming zero initial conditions,2(2)X ms cs k P ++= results in the transfer function2/(1/)/((/)2/)X P m s c m s k m =++ 2(2/)(2/)((/)2/)k k m s c m s k m =++As we see2(2)X m s c s k P++= As P is constantSo X ∝212ms cs k ++ . When 56.25102cs m-=-=-⨯ ()25min210mscs k ++=4max5100.110X == This is a second-order transfer function where 22/n k m ω= and/2/22n c w m c k m ζ== The damped natural frequency is given by 2212/1/8d n k m c km ωωζ=-=-22/(/2)k m c m =- Using the given data,462510/2100.050.2236n ω=⨯⨯⨯== 462502.79501022100.05ζ-==⨯⨯⨯⨯ ()240.22361 2.7950100.2236d ω-=⨯-⨯= With these data we can draw a picture14.0501160004.673600p de s e T T πωτζωτ======222222112/1222()22,,,428sin (sin cos )0tan 7.030.02n n pp dd n dd n ntd d t t t n d p d d p ddd p p p nX k m c k P ms cs k k m s s s m m k c k c cm m m m km p x e tm p xe t t m t t x m ζωζωωωζωωωωζζωωωζωωωωωωωζω--===⋅=⋅++++++=-===∴==-+=∴=⇒=⇒= 其中Problem4.10 4.10 solution:The system is similar to the one in the book on PAGE 58 to PAGE 63. The difference is the connection of the spring. So the transfer function is2222l n d n n w s w s w θθζ=++222(),;p a m ld a m p m l m l l m mm l lk k k N RJs RCs R k k N k J N J J C N c c N N N θθωθωθ=+++=+=+===p a mn K K K w NJ R='damping ratio 2p a m c NRK K K J ζ='But the value of J is different, because there is a spring connected.122s m J J J J N N '=++Because of final-value theorem,2l nd w θθζ=Module5Problem5.45.4 The closed-loop transfer function of the system may be written as2221010(1)610101*********CR K K K S S K K S S K S S +++==+++++++ The closed-loop poles are the solutions of the characteristic equation6364(1010)3110210(1)n K S K JW K -±-+==-±+=+ 210(1)6310(1)E K E K +==+In order to study the stability of the system, the behavior of the closed-loop poles when the gain K increases from zero to infinte will be observed. So when12K = 3010E =321S J =-± 210K = 3110110E =3101S J =-± 320K = 21070E =3201S J =-±双击下面可以看到原图ReProblem5.5SolutionThe closed-loop transfer function is2222(1)1(1)KC K KsKR s K as s aKs Kass===+++++∙+Comparing the closed-loop transfer function with the generalized form, 2222nn nCR s sωξωω=++Leading to2nKa Kωξ==The percentage overshoot is therefore2110040%PO eξπξ--==Producing the result0.869ξ=(0.28)And the peak time241PnT sπωξ==-Leading to1.586nω=(0.82)Problem5.75.7 Prove that the rise time T r of a second-order system with a unit step input is given byT r = d ω1 tan -1n dζωω = d ω1 tan -1d ωζ21--Plot the rise against the damping ratio.Solution:According to (4.33):c(t)=1-2(cos sin )1n t d d e t t ζωζωωζ-+-. 4.33When t=r T ,c(t)=1.substitue c(t)= 1 into (4.33) Producing the resultr T =d ω1 tan -1n dζωω = d ω1 tan -112ζζ--Plot the rise time against the damping ratio:Problem5.9Solution to 5.9:As we know that the system is the open-loop transfer function of a unity-feedback control system.So ()()GH S G S = Given as()()()425KGH s s s =-+The close-loop transfer function of the system may be written as()()()()()41254G s C Ks R GH s s s K ==+-++ The characteristic equation is()()2254034100s s K s s K -++=⇒++-=According to the Routh ’s method, the Routh ’s array must be formed as follow20141030410s K s s K -- For there is no closed-loop poles to the right of the imaginary axis4100 2.5K K -≥⇒≥ Given that 0.5ζ=4103 4.752410n K K K ωζ=-=⇒=- When K=0, the root are s=+2,-5According to the characteristic equation, the solutions are349424s K =-±-while 3.0625K ≤, we have one or two solutions, all are integral number.Or we will have solutions with imaginary number. So we can drawK=102 -5 K=0K=3.0625K=2.5 K=10Open-loop polesClosed-loop polesProblem5.10 5.10 solution:0.62/n w rad sζ==according to()211sin()21n w t d e c w t ζφζ-=-+=- 1.2sin(1.6)0.4t e t φ-⋅+= 4t a n3φ= finally, t is delay time:1.23t s ≈(0.67)Module6Problem 6.3First we assume the disturbance D to be zero:e R C =-1011C K e s s =⋅⋅⋅+Hence:(1)10(1)e s s R K s s +=++ Then we set the input R to be zero:10()(1)C K e D e s s =⋅+⋅=-+ ⇒ 1010(1)e D K s s =-++Adding these two results together:(1)1010(1)10(1)s s e R D K s s K s s +=⋅-⋅++++21()R s s =; 1()D s s= ∴222110910(1)10(1)100(1)s s e Ks s s Ks s s s s s +-=-=++++++ the steady-state error:232200099lim lim lim 0.09100100ss s s s s s s e s e s s s s s →→→--=⋅===-++++Problem 6.4Determine the disturbance rejection ratio(DRR) for the system shown in Fig P.6.4+fig.P.6.4 solution :from the diagram we can know :0.210.05mv K RK c === so we can get that()0.21115()0.05v m m OL n CL K K DRR cR ωω∆⨯==+=+=∆210.10.050.050.025s s =++, so c=0.025, DRR=9Problem 6.5 6.5 SolutionFor the purposes of determining the steady-state error of the system, we should get to know the effect of the input and the disturbance along when the other will be assumed to be zero.First to simplify the block diagram to the following patter:110s +2021Js Tddθoθ0.220.10.05s ++__+d T—Allowing the transfer function from the input to the output position to be written as01220220d Js s θθ=++ 012222020240*220220(220)dJs s Js s s Js s sθθ===++++++ According to the equation E=R-C:022*******(2)()lim[()()]lim[(1)]lim 0.2220220ssr d s s s Js e s s s s Js s Js s δδδθθ→→→+=-=-==++++问题;1. 系统型为2,对于阶跃输入,稳态误差为0.2. 终值定理写的不对。
自动控制原理重点英文单词+汉语翻译
Closed-loop control systems 闭环控制系统Open-loop control systems开环控制系统Process 过程Linear system线性系统Nonlinear system非线性系统Continuous system 连续系统Discrete system离散系统Stability 稳定性Steady-state performance 稳态性能Transient performance 暂态特性mathematical model 数学模型differential equations 微分方程Transfer function传递函数zeros and poles of transfer function传递函数的零极点Inverse proportion part 比例环节Inertia part惯性环节Integral part 积分环节Derivative part 微分环节Vibrate part震荡环节Delay part 滞后环节Block diagram (Equivalent transformation)方框图(Unit) negative (positive) feedback loop 负(正)反馈回路Mason formula 梅逊公式disturbance 干扰Step signal 阶跃信号Ramp signal(speed function signal) 斜波信号Parabola signal(acceleration signal) 加速度信号pulse signal脉冲信号Sinusoidal signal 正弦信号Delay time延迟时间Rise time 上升时间Peak time峰值时间Settling time 稳定时间Percent overshoot超调量Steady-state error稳态误差position error coefficient Kp speed error coefficient Kv acceleration error coefficient Kafirst-order system一阶系统S econd-order system 二阶系统high-order system 高阶系统Dominant pole主导极点Underdamped欠阻尼Critically Damped临界阻尼Overdamped 过阻尼Undamped无阻尼的Routh-Hurwitz stability criterion劳斯稳定性判据R outh array 劳斯表Character equation 特征方程root locus 根轨迹open-loop zeros and poles 开环零极点Magnitude and angle requirements of root locus幅值与相角frequency character 频率特征(inverse) Laplace transformation 拉普拉斯(反)变换Nyquist plot奈奎斯特图Bode diagram波德图Logarithmic magnitude frequency character对数幅值频率特性Logarithmic phase frequency character对数相频特征Nyquist stability criterion奈奎斯特稳定判据cutoff frequency 剪切频率Phase margin 相位裕量Gain margin 增益裕量Cutoff frequencyCascade phase-lead compensation串联超前矫正Cascade phase-lag compensation 串联滞后校正Cascade phase-lag and -lead compensation串联滞后-超前矫正sample control system 采样控制系统digital control system 数控系统discrete control system离散控制系统Shannon sampling theorem 香农采样定理Zero-order hold 零阶保持sampling period 采样周期Sampling frequency 采样频率Z-transform z变换Z-inverse transform z逆变换pulse transfer function脉冲传递函数bilinear transform双线性变换。
自动控制原理英文词汇索引
Signal input single output SISO 单输入单输出Dynamic system 动态系统Multivariable control 多变量控制Multi input and multi output 多输入多输出Root locus method 根轨迹方法Time domain 时域Disturbance 干扰Frequency domain 频域Stochastic system 随机系统Phase 相位Uncertainty 不确定性Distributed parameter system 分布参数系统Discrete system 离散系统Robust control 鲁棒控制System identification 系统辨识Adaptive control 自适应控制Simulation 仿真Nonlinear 非线性Symbolic computation 符号计算Toolbox 工具箱Numerical computation 数值计算Diagonal canonical form 对角线规范形Jordan canonical form 约当规范形Controlled system 受控系统、被控系统Ordinary differential equation 常微分方程Derivative 导数Time-invariant system 定常系统、时不变系统Matrix 矩阵Continuous-time system 连续系统、连续时间系统Time-varying system 时变系统、非定常系统Output equation 输出方程Mathematic model 数学模型Linear system 线性系统Vector 向量State 状态State equation 状态方程State trace 状态轨迹State space model 状态空间模型Transfer function 传递函数Inverted pendulum 倒立摆Diagonal matrix 对角线矩阵Fourier transformation 傅里叶变换Inertial element 惯性环节Block diagonal matrix 块对角矩阵Linearization 线性化Phase variable 相变量Strictly proper rational function 严格真有理函数Companior matrix 友矩阵Jordan matrix 约当矩阵Adjoint matrix 伴随矩阵Non-singurler matrix 非奇异矩阵、可逆矩阵Generality eigenvector 广义特征向量Canonical form 规范形、标准形、典范形Geometric multiple number 几何重数Algebraic multiple number 代数重数Characteristic polynomial 特征多项式Characteristic equation 特征方程Eigenvecto 特征向量rLinear transformation 线性变换Rank 秩Parallel connection 并行联接Transfer function matrix 传递函数矩阵Series connection 串联联接Feedback connection 反馈联接Laplace transformation 拉普拉斯变换Rational matrix function 有理矩阵函数Composition system 组合系统Analog to Digital converter A/D 转换、数模转换Digital to Analog converter D/A 转换、数模转换z transformation z变换sampled system 采样系统difference equation 差分方程discrete-time system 离散系统、离散时间系统delay 延迟initial time 初始时间initial state 初始状态polynomial 多项式non-homogenerous state equation 非齐次状态方程step signal 阶跃信号matrix exponent function 矩阵指数函数convolution 卷积zero-input response 零输入响应zero-state response 零状态响应impulse response 脉冲响应impulse signal 脉冲信号homogenerous 齐次性homogenerous state equation 齐次状态方程output response 输出响应state transistion matrix 状态转移矩阵Cayley-Hamilton Theorem 凯莱-哈密顿定理Momic polynomial 首一多项式Minimal polynomial 最小多项式Recursive algorithm 递推算法Gram matrix 格拉姆矩阵Functional linear independence 函数线性无关Functional linear denpendence 函数线性相关Modality criterion 模态判据Controllability 能控性、可控性Controllability Matrix 能控性矩阵Output controllability 输出能控性Rank criterion 秩判据State controllability 状态能控性Observability 能观测性、可观测性Observability matrix 能观性矩阵Observability criterion 能观性判据Reachability 能达性、可达性Duality 对偶性Structural decomposition 结构分解Zero 零点Zero-pole cancel 零极点相消Subspace 子空间Subsystem 子系统Luenberger controllability canonical form 龙伯格能控规范形Observability canonical form 能观规范形controllability canonical form 能控规范形controllability index 能控性指数Wonham controllability canonical form 旺纳姆能控规范形System realization 系统实现Minimal realization 最小实现Definite sign 定号性Norm 范数Non-positive definite matrix 非正定矩阵Euclidean norm 2-norm 欧几里德范数、2范数Equilibrium state 平衡点Input-output stability 输入输出稳定性Stability 稳定性Consistent stability 一致稳定Bounded-input bounded-output stability BIBO stability 有界输入有界输出稳定性State stability 状态稳定性Algebraic equation 代数方程Symmetry matrix 对称矩阵Quadratic function 二次型函数Non-negative definite matrix 非负定矩阵Negative definite matrix 负定矩阵Asymptotic stability 渐进稳定Sylvester Theorem 赛尔维斯特定理Stability criterion 稳定判据Jacobi matrix 雅可比矩阵Positive-definite matrix 正定矩阵Output feedback 输出反馈State feedback 状态反馈Pole assignment 极点配置System synthesis 系统综合Stable control 镇定控制Compensator decouple 补偿器解耦Decouple 解耦Observer 观测器Reduction-dimension observer 降维观测器Full-dimension observer 全维观测器State estimation 状态观测器State observating error 状态观测器误差State observatory 状态观测器。
自动控制原理专业英语词汇
自动原理控制专业英语词汇线性反馈系统的稳定性辅助多项式:Auxiliary polynomial相对稳定性:Relative stabilityRouth-Hurwitz判据:Routh-Hurwitz criterion稳定性:Stability稳定系统:Stable system根轨迹法出射角:Angle of departure渐近线:Asymptote渐近中心:Asymptote centroid分离点:Breakaway point轨迹:Locus根轨迹的条数:Number of separate loci参数设计:Parameter design根轨迹:Root locus根轨迹法:Root locus method实轴上的根轨迹段:Root locus segments on the real axis根灵敏度:Root sensitivity频率响应方法带宽:BandwidthBode 图:Bode plot截止频率:Break frequency转折频率:Corner frequency分贝(db):Decibel (DB)Fourier变换:Fourier transform频率响应:Frequency response对数幅值:Logarithmic magnitude对数坐标图:Logarithmic plot频率响应的最大值:Maximum value of the frequency最小相位:Minimum phase固有频率:Natural frequency非最小相位:Nonminimum phase极坐标图:Polar plot谐振频率:Resonant frequency频率特性函数:Transfer function in the frequency domain频域稳定性Cauchy定理:Cauchy thorem闭环频率响应:Closed-loop frequency response保角映射:Conformal mapping围线映射:Conrour map增益裕度:Gain marginNichols图:Nichols chartNyquist 稳定性判据:Nyquist stability criterion相角裕度:Phase margin幅角原理:Principle of the argument时延:Time delay反馈控制系统设计串联校正网络:Cascade compensation network校正:Compensation数字控制系统幅值量化误差:Amplitude quantization error数字计算机校正网络:Digital computer compensator数字控制系统:Digital control system采样数据:Sampled data数据采样系统:Sampled-data system式样周期:Sampling period数据采样系统的稳定性:Stability of a sampled-data system z平面:z-planez变换:z-transforma. c .balance indicator,交流平衡指示器a. c. bridge,交流电桥a. c. current calibrator,交流电流校准器a. c. current distortion,交流电流失真a. c. induced polarization instrument,交流激电仪a. c. potentiometer,交流电位差计a. c. resistance box,交流电阻箱a. c. standard resistor,交流标准电阻器a. c. voltage distortion,交流电压校准器a. c. voltage distortion,交流电压失真Abbe comparator,阿贝比长仪aberration,象差ability of anti prereduced component,抗先还原物质能力ablative thickness transducer [sensor],烧蚀厚度传感器abrasion testing machine,磨损试验机absolute calibration,绝对法校准absolute coil,独立线圈absolute error,绝对误差(absolute)error of measurement,测量的(绝对)误差absolute gravimeter,绝对重力仪absolute gravity survey,绝对重力测量absolute humidity,绝对湿度absolute method,绝对法absolute moisture of the soil,土壤(绝对)湿度absolute pressure,绝对压力absolute(pressure transducer,绝对压力表absolute pressure transducer[sensor],绝对压力传感器absolute read-out,单独读出absolute resolution,绝对分辨率absolute salinity,绝对盐度absolute stability,绝对稳定性absolute stability of a linear system,线性系统的绝对稳定性absolute static pressure of the fluid,流体绝对静压absolute temperature scale,绝对温标absorbance,吸光度absorbed current image,吸收电流象absorptance,吸收比absorptiometer,吸收光度计absorption cell,吸收池absorption coefficient,吸收系数absorption correction,吸收修正absorption edges,吸收边absorption factor,吸收系数absorption hygrometer,吸收温度表absorption spectrum,吸收光谱absorption X-ray spectrometry,吸收X射线谱法absorptivity,吸收率absorptivity of an absorbing,吸引材料的吸收率abstract system,抽象系统abundance sensityivity,丰度灵敏度AC-ACLVDT displacement transducer,交流差动变压器式位移传感器accelerated test,加速试验accelerating voltage,加速电压acceleration,加速度acceleration error coefficient,加速度误差系数acceleration of gravity,重力加速度acceleration simulator,加速度仿真器acceleration transducer[sensor],加速度传感器accelerometer,加速度计acceptance of the mass filter,滤质器的接收容限acceptance test,验[交]收检验access,存取 access time,存取时间accessibility,可及性accessories of testing machine,试验机附件accessory(for a measuring instrument),(测量仪表的)附件accessory hardware,附属硬件accessory of limited interchangeability,有限互换附件accumulated error,积累误差accumulated time difference,累积时差accumulative raingauge,累积雨量器accumulator,累加器accuracy,精[准]确度accuracy class,精[准]确度等级accuracy limit factor(of a protective current transformer), (保护用电流互感器的)精确度极限因数accuracy of measurement,测量精[准]确度accuracy of the wavelength,波长精确度accuracy rating,精确度限acetylene(pressure)gauge,乙炔压力表acetylene regulator,乙炔减压器acoustic amplitude logger,声波幅度测井仪acoustic beacon,水声信标acoustic current meter,声学海流计acoustic element,声学元件acoustic emission,声发射acoustic emission amplitude,声发射振幅acoustic emission analysis system,声发射分析系统acoustic emission detection system,声发射检测系统acoustic emission detector,声发射检测仪acoustic emission energy,声发射能量acoustic emission event,声发射事件acoustic emission preamplifier,声发射前置放大器acoustic emission pulser,声发射脉冲发生器acoustic emission rate,声发射率acoustic emission signal processor[conditioner],声发射信号处理器acoustic emission rate,声发射信号acoustic emission source location and analysis system,声发射源定位及分析系统acoustic emission source location system,声发射源定位系统acoustic emission source,声发射源acoustic emission spectrum,声发射频谱acoustic emission technique,声发射技术acoustic emission transducer[sensor],声发射换能器acoustic fatigue,声疲劳acoustic impedance,声阻抗acoustic logging instrument,声波测井仪acoustic malfunction,声失效acoustic matching layer,声匹配层acoustic(quantity)transducer[sensor],声(学量)传感器acoustic ratio,声比acoustic releaser,声释放器acoustic resistance,声阻acoustic thermometer,声学温度计;声波温度表acoustic tide gauge,回声验潮仪acoustic transponder,声应答器acoustical frequency electric,声频大地电场仪acoustical hologram,声全息图acoustical holography,声全息acoustical holography by electron-beam scanning,电子束扫描声全息acoustical holography by laser scanning,激光束扫描声全息acoustical holography by mechanical scanning,机械扫查声全息acoustical imaging by Bragg diffraction,布拉格衍射声成像acoustical impedance method,声阻法acoustical lens,声透镜acoustically transparent pressure vessel,透声压力容器acquisition time,取数据时间actinometer,光能计;直接日射强度表;日射表(active)energy meter,(有功)电度表active gauge length,有效基长active gauge width,有效基宽active metal indicated electrode,活性金属指示电极active remote sensing,主动遥感active transducer[sensor],有源传感器activity,活度 activity coefficient,活度系数actual material calibration,实物校准actual time of observation,实际观测时间actual transformation ratio of voltage transformer,电压互感器的实际变化actral transformation ratio of current transformer,电流互感器的实际变化actual value,实际值actual voltage ratio,实际电压比actuator,执行机构;驱动器actuator bellows,执行机构波纹管actuator load,执行机构负载actuator power unit,执行机构动力部件actuator sensor interface(ASI),执行器传感器接口actuator shaft,执行机构输出轴actuator spring,执行机构弹簧actuator stem,执行机构输出杆actuator stem force,执行机构刚度actuator travel characteristic,执行机构行程特性adaptation layer,适应层adaptive control,(自)适应控制adaptive control system,适应控制系统adaptive controller,适应控制器adaptive prediction,适应预报adaptive telemetering system,适应遥测系统adder,加法器addition method,叠加法additional correction,补充修正additivity of mass spectra,质谱的可迭加性address,地址 adiabatic calorimeter,绝热式热量计adjust buffer total ion strength,总离子强度调节缓冲剂adjustable cistern barometer,动槽水银气压表adjustable relative humidity range,相对湿度可调范围adjustable temperature range,温度可调范围adjusted retention time,调整保留时间adjusted retention volume,调整保留体积adjuster,调整机构;调节器adjustment,调整adjustment bellows,调节波纹管adjustment device,调整装置adjusting pin,校正针adsorbent,吸附剂adsorption chromatography,吸附色谱法aerial camera,航空照相机aerial remote sensing,航空遥感aerial surveying camera,航摄仪aerodynamic balance,空气动力学天平aerodynamic noise,气体动力噪声aerograph,高空气象计aerogravity survey,航空重力测量aerometeorograph,高空气象计aerosol,县浮微料;气溶胶aging of column,柱老化agitator,搅拌器agricultural analyzer,农用分析仪air-borne gravimeter,航空重力仪air capacitor,空气电容器air consumption,耗气量air damper,空气阻尼器air-deployable buoy,空投式极地浮标air-drop automatic station,空投自动气象站air duct,风道air gun,空气枪air inlet,进风口air lock,气锁阀air-lock device,锁气装置air outlet,回风口air pressrue balance,空气压力天平air pressure test,空气压力试验air sleeve,风(向)袋air temperature,气温air-tight instrument,气密式仪器仪表air to close,气关air to open,气开airborne electromagnetic system;AEM system,航空电磁系统airborne flux-gate magnetometer,航空磁通门磁力仪airborne gamma radiometer,航空伽玛辐射仪airborne gamma spectrometer,航空伽玛能谱仪airborne infrared spectroradiometer,机载红外光谱辐射计airborne optical pumping magnetometer,航空光泵磁力仪airborne proton magnetometer,航空甚低频电磁系统airborne XBT,机载投弃式深温计airgun controller,气控制器airmeter,气流表alarm summery panel,报警汇总画面alarm unit,报警单元albedograph,反射计alcohol thermometer,酒精温度表algorithm,算法 algorithmic language,算法语言alidade,照准仪alignment instrument,准线仪alkali flame ionization detector(AFID),碱焰离子化检测器alkaline error,碱误差alkalinity of seawater,海水碱度all-sky camera,全天空照相机all-weather wind vane and anemometer,全天候风向风速计allocation problem,配置问题;分配问题allowable load impedance,允许的负载阻抗allowable pressure differential,允许压差allowable unbalance,许用不平衡量alpha spectrometer,α粒子能谱仪alternating[exchange]load,交变负荷alternating-current linear variable differential transformer(AC-ACLVDT), 交流极谱仪alternating temperature humidity test chamber,交变湿热试验箱altimeter,高度计altitude angle,高度角altitude meter,测高仪ambient humidity range,环境湿度范围ambient pressure,环境压力ambient pressure error,环境压力误差ambient temperature,环境ambient temperature range,环境温度范围ambient vibration,环境振动ambiguity error,模糊误差ammeter,电流表ammonia(pressure)gauge,氨压力表amount of precipitation,雨量amount of unbalance,不平衡量amount of unbalance indicatior,不平衡量指示器ampere-hour meter,安时计amplitude,幅值amplitude detector module,振幅检测组件amplitude error,振幅误差amplitude modulation(AM),幅度调制;调幅amplitude-phase error,幅相误差amplitude ratio-phase difference instrument,振幅比—相位差仪amplitude response,幅值响应analog computer,模拟计算机analog control,模拟控制analog data,模拟数据analog deep-level seismograhp,模拟深层地震仪analog input,模拟输入analog magnetic tape record type strong-motion instrument,模拟磁带记录强震仪analog model,模拟模型analog output,模拟输出analog seismograph tape recorder,模拟磁带地震记录仪analog simulation,模拟仿真analog stereopotter,模拟型立体测图仪analog superconduction magnetometer,模拟式超导磁力仪analog system,模拟系统analog telemetering system,模拟遥测系统analog-to-digital conversion accuracy,模-数转换精确度analog-to-digital conversion rate,模-数转换速度analog transducer[sensor],模拟传感器analogue computer,模拟计算单元analogue date,模拟数据analogue measuring instrument,模拟式测量仪器仪表analogue representation of a physical quantity,物理量的模拟表示analogue signal,模拟试验analogue-digital converter;A/D converter,模-数转换器;A/D转换器analogue-to-digital conversion,模/数转[变]换analysis of simulation experiment,仿真实验分析analytical balance,分析天平analytical electron microscope,分析型电子显微镜analytical gap,分析间隙analytical instrument,分析仪器analytical line,分析线analytical plotter,解析测图仪analyzer tube,分析管anechoic chamber,消声室;电波暗室anechoic tank,消声水池anemograph,风速计anemometer,风速表anemometer meast,测风杆anemometer tower,测风塔aneroid barograph,空盒气压计aneroid barometer,空盒气压表;空盒气压计aneroidograph,空盒气压计angle,角度angle beam technique,斜角法angle beam testing,斜角法angle form,角型angle of attach,冲角angle of field of view,视场角angle of incidence,入射角angle of refraction,折射角angle of spread,指向角;半扩散角angle of view of telescope,望远镜视场角angle of X-ray projiction,X射线辐射圆锥角angle probe,斜探头angle resolved electron spectroscopy(ARES),角分辨电子谱法angle strain,角应变angle transducer[sensor],角度传感器anglg-attack transducer[sensor],迎角传感器angle valve,角形阀angular acceleration,角加速度angular acceleration transducer[sensor],角加速度传感器angular displacement,角加速度传感器angular displacement,角位移angular displacement grationg,角位移光栅angular encoder,角编码器angular sensitivity,角灵敏度angular velocity transducer[sensor],角速度传感器annular coil clearance,环形线圈间隙annular space,环形间隙annunciator,信号源anode,阳极answering,应答anti-cavitation valve,防空化阀anti-contamination device,防污染装置anti-coupling bi-frequency induced polarization instrument,抗耦双频激电仪anti-magnetized varistor,消磁电压敏电阻器antiresonance,反共振antiresonance frequency,反共振频率anti-stockes line,反斯托克线aperiodic dampong,非周期阻尼;过阻尼aperiodic vibration,非周期振动aperture,光阑aperture of pressure difference,压差光阑aperture photographic method,针孔摄影法aperture stop,孔径光栏aperture time,空隙时间apparatus for measuring d.c.magnetic characteristic with ballistic galvanometer, 冲击法直流磁特性测量装置apparent temperature,表观温度appearance potentical,出现电位appearance potential spectrometer,出现电热谱仪appearance potential spectrometer(APS),出现电热谱法application layer(AL),应用层application layer protocol specification,应用层协议规范application layer service definition,应用室服务定义application software,应用软件approval,批准approximate absolute temperature scale,近似绝对温标aqueous vapour,水汽arc suppressing varstor,消弧电压敏电阻器arctic buoy,极地浮标area effect,面积影响area location,区域定位area of cross section of the main air flow,主送风方向横截面积argon-ion gun,氩离子枪annular chamber,环室argon ionization detector,氩离子化检测器arithmetic logic unit(ALU),算术逻辑运算单元arithmetic mean,算术平均值arithmetic weighted mean,算术加权平均值arithmetical mean deviation of the(foughness)profile,(粗糙度)轮廓的算术平均偏差arm error,不等臂误差armature,动铁芯array,阵,阵列array configuration,阵排列arrester varistor,防雷用电压敏电阻器articulated robot,关节型机器人artificial defect,人工缺陷artificial environment,人工环境artificial field method instrument,人工电场法仪器artificial intelligence,人工智能artificial seawater,人工海水ash fusion point determination meter,异步通信接口适配器asynchronous input,异步输入asynchronous transmission,异步传输atmidometer,蒸发仪,蒸发表atmometer,蒸发仪;蒸发表atmoradiograph,天电强度计atmosphere,气氛atmospheric counter radiation,天气向下辐射atmospheric electricity,大气电atmospheric opacity,大气不透明度atmospheric pressure,气压atmospheric pressure altimeter,气压高度计atmospheric pressure ionization(API),大气压电离atmospherics,天电;远程雷电atom force microscope,原子力显微镜atomic absorption spectrometry,原子吸收光谱法atomic fluorescence spectrophotometer,原子荧光光度计atomic fluorescence spectrometry,原子荧光光谱法atomic mass unit,原子质量单位atomic number correction,原子序数修正atomin spectrum,原子光谱atomic-absorption spectrophotometer,原子吸收分光光度计atomization,原子化atomizer,原子化器attenuation,衰减attenuation coefficient,衰减系数attenuation length,衰减长度attenuator,衰减器attitude,姿态attitude transducer[sensor],姿态传感器audio monitor,监听器audio-frequency spectrometer,声频频谱仪audit,审核Auger electron energy spectrometer(AEES),俄歇电子能谱仪Auger electron image,俄歇电子象Auger electron spectrometer,俄歇电子能谱仪Auger electron spectroscopy(AES),俄歇电子能谱法aurora,极光auto-compensation logging instrument,电子自动测井仪auto-compound current transformer,自耦式混合绕组电流互感器auto-polarization compensator,自动极化补偿器autocorrelation function,自相关函数automatic a.c.,d.c.B-H curve tracer,交、直流磁特性自动记录装置automatic balancing machine,自动平衡机automatic control,自动控制automatic control souce of vacuum,真空自动控制电源automatic control system,自动控制系统automatic data processing,自动数据处理automatic exposure device,自动曝光装置automatic feeder for brine,盐水溶液自动补给器automatic focus and stigmator,自动调焦和消象散装置automatic level,自动安平水准仪automatic levelling compensator,视轴安平补偿器automatic/manual station;A/M station,自动/手动操作器automatic programming,自动程度设计automatic radio wind wane and anemometer,无线电自动风向风速仪automatic railway weigh bridge,电子轨道衡automatic scanning,自动扫查automatic spring pipette,自动弹簧式吸液管automatic testing machine,自动试验机automatic titrator,自动滴定仪automatic tracking,自动跟踪automatic vertical index,竖直度盘指标补偿器automatic weather station,自动气象站automation,自动化automaton,自动机auxiliary attachment,辅件auxiliary controller bus(ACB),辅助控制器总线auxiliary crate controller,辅助机箱控制器auxiliary devices,辅助装置auxiliary equipment(of potentiometer),(电位差计的)辅助设备auxiliary gas,辅助气体auxiliary output signal,辅助输出信号auxiliary storage,辅助存储器auxiliary terminal,辅助端auxiliary type gravimeter,助动型重力仪availability,可用性available time,可用时间average,平均值average availability,平均可用度average nominal characteristic,平均名义特性average sound level,平均声级average value of contarmination,污染的平均值average wind speed,平均风速axial clearance,轴向间隙axial current flow method,轴向通电法axial load,轴向载荷axial sensitivity,轴向灵敏度axial vibration,轴向振动axis of rotation,摆轴;旋转轴axix of strain gauge,应变计[片]轴线B-scope,B型显示back flushing,反吹background,后台,背景,本底background current,基流background mass spectrum,本底质谱background noise,背景噪声background processing,后台处理background program,后台程度Backman thermometer,贝克曼温度计backscattered electron image,背散射电子象backward channel,反向信道baffle wall,隔板balance,天平balance for measuring amount of precipitation,水量秤balance output,对称输出balance quality of rotor,转子平衡精度balance wieght,平衡块balanced plug,平衡型阀芯balancing,平衡balancing machine sensitivity,平衡机灵敏度balancing machine,平衡机balancing speed,平衡转速ball pneumatic dead wieght tester,浮球压力计ball screw assembly,滚珠丝杠副ball valve,球阀ballistic galvanometer,冲击栓流计band,频带bandwidth,带宽band width of video amplifier,视频放大器频宽bar primary bushing type current transformer,棒形电流互感器barograph,气压计barometer cistern,气压表水银槽barometer,气压表barometric correction,气压表器差修正barometrograph,空盒气压计barothermograph,气压温度计barrel distortion,桶形畸变;负畸变base,基底base line,基线base peak,基峰base unit(of measurement),基本(测量)单位baseband LAM,基带局域网baseline drift,基线漂移baseline noise,基线噪声baseline potential,空白电位baseline value,空白值basic NMR frequency,基本核磁共振频率basic standard,基础标准batch control,批量控制batch control station,批量控制站batch inlet,分批进样batch of strain gauge,应变计[片]批batch processing,成批处理batch processing simulation,批处理仿真Baud,波特beam,横梁;声速beam deflector,电子束偏转器beam path distance,声程beam ratio,声束比beam spot diameter,束斑直径beam-deflection ultrasonic flowmeter,声速偏转式超声流量计beam-loading thermobalance,水平式热天平bearing,轴承;刀承bearing axis,轴承中心线bdaring support,支承架beat frequency oscillator,拍频振荡器beat method(of measurement),差拍(测量)法Beaufort scale,蒲福风级Beckman differential thermometer,贝克曼温度计bed,机座Beer' law,比尔定律bell manometer,钟罩压力计bell prover,钟罩校准器bellows,波纹管bellows(pressure)gauge,波纹管压力表bellows seal bonnet,波纹管密封型上阀盖bench mark,水准点bending strength,弯曲强度bending vibration,弯曲振动bent stem earth thermometer,曲管地温表Besson nephoscope,贝森测云器betatron,电子回旋加速器;电子感应加速器bezel ring,盖环bias voltage,偏压bi-directional vane,双向风向标;双风信标bilateral current stabilizer,双向稳流器bimetallic element,双金属元件bimetallic instrument,双金属式仪表bimetallic temperature transducer[sensor],双金属温度传感器bimetallic thermometer,双金属温度计binary coded decimal(BCD),二-十进制编码binary control,二进制控制binary digital,二进制数字binary elastic scattering event,双弹性散射过程binary elastic scattering peak,双弹性散射峰binary element,二进制元binary signal,二进制信号biomedical analyzer,生物医学分析仪biochemical oxygen demand (BOD)microbial transducer[sensor],微生物BOD传感器 biochemical oxygen demand meter for seawater,海水生化需氧量测定仪biochemical quantity transducer[sensor],生化量传感器biological quantity transducer[sensor],生物量传感器biosensor,生物传感器bird receiving system,吊舱接收系统bit,比特;位bit error rate,误码率bit serial,位串行bit-serial higgway,位串行信息公路bivane,双向风向标;双风信标black box,未知框black light filter,透过紫外线的滤光片black light lamp,紫外线照射装置blackbody,黑体blackbody chamber,黑体腔blackbody furnace,黑体炉bland test,空白试验balzed grating,闪耀光栅block,块体;字块;字组;均温块block check,块检验block diagram,方块(框)图block length,字块长度block transfer,块传递blood calcium ion transducer[sensor],血钙传感器blood carbon dioxide transducer[sensor],血液二氧化碳传感器blood chloried ion transducer[sensor],血氯传感器blood electrolyte transducer[sensor],血液电解质传感器blood flow transducer[sensor],血流传感器blood gas transducer[sensor],血气传感器blood-group immune transducer[sensor],免疫血型传感器blood oxygen transducer[sensor],血氧传感器blood PH transducer[sensor],血液PH传感器blood potassium ion transducer[sensor],血钾传感器blood-pressure transducer[sensor],血压传感器blood sodium ion transducer[sensor],血钠传感器blood-volume transducer[sensor],血容量传感器blower device,鼓风装置bluff body,阻流体Bode diagram,博德图body temperature transducer,体温传感器bolometer,辐射热计;热副射仪bomb head tray,弹头托盘honded strain gauge,粘贴式应变计bonnet,上阀盖boomerang grab,自返式取样器boomerang gravity corer,自返式深海取样管booster,增强器bore(of liquid-in-glass thermometer),(玻璃温度计的)内孔borehole acoustic television logger,超声电视测井仪borehole compensated sonic logger,补偿声波测井仪borehole gravimeter,井中重力仪borehloe gravimetry,井中重力测量borehole thermometer,井温仪bottorm echo,底面反射波bottom flange,下阀盖bottom-loading thermobalance,下皿式热天平bottom surface,底面Bouguer's law,伯格定律Bourdon pressure sensor,弹簧管压力检测元件Bourdon tube,弹簧管;波登管Bourdon tube(pressure)gauge,弹簧管压力表box gauge,箱式验潮仪BP-scope,BP 型显示Bragg's equation,布拉格方程braking time,制动时间braking torque(of an integrating instrument),(积分式仪表的)制动力矩branch,分支branch cable,支线电缆breakdown voltage rating,绝缘强度breakpoint,断点breather,换气装置bremsstrahlung,韧致辐射bridge,桥接器bridge's balance range,电桥平衡范围bright field electron image,明场电子象bridge for measuring temperature,测温电桥bridge resistance,桥路电阻brightness,亮度Brinell hardness number,布氏硬度值Brinell hardnell penetrator,布氏硬度压头Brienll hardenss tester,布氏硬度计broadband LAN,定带局域网broad-band random vibration,宽带随机振动broad band spectrum,宽波段broadcast,广播BT-calibrationg installation,深温计[BT]检定装置bubble,水准泡bubble-tube,吹气管bucket thermometer,表层温度表buffer,缓冲器buffer solution,缓冲溶液buffer storage,缓冲存储器built-in galvanometer,内装式检流计built-in-weigthts,挂码bulb,温包;感温泡bulb(of filled system themometer),(压力式温度计的)温包bulb(of liquid-in-glass thermometer),(玻璃温度计的)感温泡bulb length(of liquid-in-glass thermometer),(玻璃温度计的)感温泡长度bulk type semiconductor strain gauge,体型半导体应变计bulk zinc oxide varistor,体型氧化锌电压敏电阻器bump,连续冲击bump test,连续冲击试验;颠簸试验bump testing machine,连续冲击台buoy,浮标buoy array,浮标阵buoy float,浮标体buoy motion package,浮标运动监测装置buoy station,浮标站buoyancy correction,浮力修正buoyancy level measuring device,浮力液位测量装置burden(of a instrument transformer),(仪用互感器的)负载burning method,燃烧法burst acoustic emission signal,突发传输bus,总线bus line,总线bus master,总线主设备bus mother board,总线母板bus network,总线网bus slave,总线从设备bus topology,总线拓扑bus type current transformer,母线式电流互感器bushing type current transformer,套管式流互感器busy,忙busy state,忙碌状态butterfly valve,蝶阀 by-pass,旁路by-pass injector,旁通进样器by-pass manifold,旁路接头by-pass valve,旁通阀Byram anemometer,拜拉姆风速表byte,字节byte frame,字节帧byte serial,字节串行byte-serial highway,字节串行住信处公路集散控制系统——Distributed Control System(DCS)现场总线控制系统——Fieldbus Control System(FCS)监控及数据采集系统——Supervisory Control And Data Acqusition(SCADA)可编程序控制器——Programmable Logic Controller(PLC)可编程计算机控制器——Programmable Computer Controller(PCC)工厂自动化——Factory Automation(FA)过程自动化——Process Automation(PA)办公自动化——Office Automation(OA)管理信息系统——Management Information System(MIS)楼宇自动化系统——Building Automation System人机界面——Human Machine Interface(HMI)工控机——Industrial Personal Computer(IPC)单片机——Single Chip Microprocessor计算机数控(CNC)远程测控终端——Remote Terminal Unit(RTU)上位机——Supervisory Computer图形用户界面(GUI)人工智能——Artificial Intelligent(AI)智能终端——Intelligent Terminal模糊控制——Fuzzy Control组态——Configuration仿真——Simulation冗余——Redundant客户/服务器——Client/Server网络——Network设备网——DeviceNET基金会现场总线——foundation fieldbus(FF)现场总线——Fieldbus以太网——Ethernet变频器——Inverter脉宽调制——Pulse Width Modulation(PWM)伺服驱动器——Servo Driver软起动器——Soft Starter步进——Step-by-Step控制阀——Control Valver流量计——Flowmeter仪表——Instrument记录仪—— Recorder传感器——Sensor智能传感器——Smart Sensor智能变送器——Smart Transducer虚拟仪器——Virtual Instrument主站/从站——Master Station/Slave station操作员站/工程师站/管理员站——Operator Station/Engineer Station/Manager Station集散控制系统——Distributed Control System(DCS)现场总线控制系统——Fieldbus Control System(FCS)监控及数据采集系统——Supervisory Control And Data Acqusition(SCADA)可编程序控制器——Programmable Logic Controller(PLC)可编程计算机控制器——Programmable Computer Controller(PCC)工厂自动化——Factory Automation(FA)过程自动化——Process Automation(PA)办公自动化——Office Automation(OA)管理信息系统——Management Information System(MIS)楼宇自动化系统——Building Automation System人机界面——Human Machine Interface(HMI)工控机——Industrial Personal Computer(IPC)单片机——Single Chip Microprocessor计算机数控(CNC)远程测控终端——Remote Terminal Unit(RTU)上位机——Supervisory Computer图形用户界面(GUI)人工智能——Artificial Intelligent(AI)智能终端——Intelligent Terminal模糊控制——Fuzzy Control组态——Configuration仿真——Simulation冗余——Redundant客户/服务器——Client/Server网络——Network设备网——DeviceNET基金会现场总线——foundation fieldbus(FF)现场总线——Fieldbus以太网——Ethernet变频器——Inverter脉宽调制——Pulse Width Modulation(PWM)伺服驱动器——Servo Driver软起动器——Soft Starter步进——Step-by-Step控制阀——Control Valver流量计——Flowmeter仪表——Instrument记录仪—— Recorder传感器——Sensor智能传感器——Smart Sensor智能变送器——Smart Transducer虚拟仪器——Virtual Instrument主站/从站——Master Station/Slave station操作员站/工程师站/管理员站——Operator Station/Engineer Station/Manager Station battery light kit 电池式灯具lamp lens 灯玻璃landing weight 卸货重量letter of indemnity | | trust receipt 赔偿保证书(信托收据range indicator 距离指示器short shipment | | goods short shipped | | goods shut out | | shut-outs 退关SMT Inductors 表面贴电感器STM-N:Synchronous Transport Module level-N 同步传送模块(electric) resistor 电阻器(With) Best Regard 谨致问候3D coordinate measurement 三次元量床A high degree of light-fastness 高质量不褪色A.C. balance indicator 交流平衡指示器A.C. bridge 交流电桥A.C. current calibrator 交流电流校正器a.c. generator 交流发动机A.C.current distortion 交流电流失真A.C.powered lamp 交流供电的灯A/C adaptor 电源适配器A/D;analog to digital 模拟/数字转换aberration 光行差/橡差abnormal low-voltage arc 反差低压电弧abnormal voltage 反常电压/异常电压Abradant material 研磨材料Abrasion test 磨损试验abrasion test 耐磨损性试验abrasive action 磨损作用abrasive blast equipment 喷砂设备Abrasive blast system 喷砂清理系统ABS American Bureau of Standard 美国标准局Absolute Colorimetric 绝对色度absolute value 绝对值absolute velocity 绝对速度absolute wave meter 绝对波长表absorption tube 吸收管/吸收试验管absorption wave meter 吸收式波长计absorption wavemeter 吸收式波长计absorption wavetrap 吸收陷波器absorptive 吸收的absorptive power 吸收本领absorptivity 吸收率ac induced polarization instrument 交流激电仪ac potentiometer 交流电位差仪AC/alternating current 交流/交流电academician,association,协会ACC Automatic Centering Control 自动控制中心accelerated life test 快速寿命测试accent lighting 重点照明Acceptability Criteria 验收Acceptable life 有效使用寿命Acceptance criteria 验收标准acceptance specification 验收规范Acceptance test specification 验收测试规范worldlightingtrade Skype即时通讯工具Access panel 罩板accommodate 调节accommodation 调适accreditation 认可accreditation of testing laboratory 测试实验室的认可accumulator 储线器/补偿器accuracy 精确度/准确度accuracy control 精确控制accuracy grade 精度等级accuracy life 精确度寿命accuracy rating 精确度限acid rinsing shop-stamping warehouse 酸洗工段房-冲压库Acid-proof paint 耐酸涂料/耐酸油漆Acid-proof paint 耐酸涂料/耐酸油漆acoustic reflection shell 声反射罩ACPI:Advanced Configuration and Power Interface 高级电源配置电源接口acquisition price 收购价Across frequency 交叉频率/分频频率Acrylic fitting 压克力配件acrylic plastic glazing 丙烯酸有机玻璃ACST access time 存取时间acting area(spot) lighting 舞台前台(聚光)照明activated electrode 激活电极activated phosphor 激活荧光粉Active 主动的,有源的,有效的,运行的Active Area 可读取范围active market 买卖活跃的市场active power 有效功率active probe 有效探头active scanning time 有效扫描时间active voltage 有效电压actual life 有效寿命actual transformation ratio of a current (voltage) transformer 电流互感器的实际电流(电压)比actual transformation ratio of a current (voltage) transformer 流互感器的实际电流(电压)比adaptable automobile mode/style 适用车型KENFOR Global Lighting Sourcing Centreadaptable voltage 适用电压adaptable/suitable tube''s current 适用灯管电流adaptation 顺应adapting luminance (视觉)亮适用性adaptive control system 适应控制系统adaptive controller 适应控制器adaptive prediction 适应预报adaptive temperature 适应温度Adaptor/adapters 适配器/转换器ADC/analog to digital ... Voltage 压敏电阻器。
自动控制原理专业词汇中英文对照.pdf
自动控制原理专业词汇中英文对照.pdf自动控制原理专业词汇中英文对照中文英文自动控制automatic control;cybernation 自动控制系统automatic control system自动控制理论 automatic control theory经典控制理论 classical control theory现代控制理论 modern control theory智能控制理论intelligent control theory 开环控制open-loop control闭环控制 closed-loop control输入量 input输出量 output给定环节 given unit/element比较环节 comparing unit/element放大环节 amplifying unit/element执行环节 actuating unit/element控制环节 controlling unit/element被控对象 (controlled) plant反馈环节 feedback unit/element控制器 controller扰动/干扰 perturbance/disturbance前向通道 forward channel反馈通道feedback channel 恒值控制系统constant control system随动控制系统servo/drive control system 程序控制系统programmed control system 连续控制系统continuous control system离散控制系统 discrete control system线性控制系统 linear control system非线性控制系统 nonlinear control system定常/时不变控制系统time-invariant control system 时变控制系统 time-variant control system 稳定性 stability快速性 rapidity准确性 accuracy数学模型 mathematical model微分方程 differential equation非线性特性 nonlinear characteristic线性化处理 linearization processing泰勒级数 Taylor series传递函数 transfer function比例环节 proportional element积分环节 integrating element一阶惯性环节 first order inertial element二阶惯性环节 second order inertial element二阶震荡环节second order oscillation element 微分环节differentiation element一阶微分环节 first order differentiation element二阶微分环节 second order differentiation element 延迟环节delay element动态结构图 dynamic structure block串联环节 serial unit并联环节 parallel unit信号流图 signal flow graph梅逊增益公式Mason’s gain formula时域分析法 time domain analysis method性能指标 performance index阶跃函数 step function斜坡函数 ramp function抛物线函数 parabolic function /acceleration function 冲击函数impulse function正弦函数 sinusoidal function动态/暂态响应 transient response静态/稳态响应 steady-state response 延迟时间 delay time上升时间 rise time峰值时间 peak time调节时间 settling time最大超调量 maximum overshoot稳态误差 steady-state error无阻尼 undamping欠阻尼 underdamping过阻尼 overdamping特征根 eigen root极点 pole零点 zero实轴 real axis虚轴 imaginary axis 稳态/静态分量 steady-state component 瞬态/暂态/动态分量transient component 运动模态motion mode衰减 attenuation系数 coefficient初相角 initial phase angle响应曲线 response curve主导极点 dominant pole 劳斯稳定判据 Routh stability criterion S平面 S plane胡尔维茨稳定判据Hurwitz stability criterion 测量误差measurement error扰动误差 agitation error结构性误差 structural error偏差 deviation根轨迹 root locus 常规根轨迹 routine root locus根轨迹方程 root locus equation 幅值 magnitude幅角 argument对称性 symmetry分离点 separation/break away point会合点 meeting/break-in point渐近线 asymptote出射角 emergence angle/angle of departure入射角incidence angle/angle of arrival 广义根轨迹generalized root locus零度根轨迹zero degree root locus 偶极子dipole/zero-pole pair 频域分析法frequency-domain analysis method 频率特性frequency characteristic极坐标系 polar coordinate system直角坐标系 rectangular coordinate system幅频特性 magnitude-frequency characteristic相频特性phase-frequency characteristic 幅相频率特性magnitude-phase frequency characteristic 最小相位系统minimum phase system非最小相位系统 nonminimum phase system奈奎斯特稳定判据Nyquist stability criterion 伯德定理Bode theorem稳定裕度 stability margin幅值裕度 magnitude margin 相位/相角裕度 phase margin对数幅频特性 log magnitude-frequency characteristic 无阻尼自然震荡角频率 undamped oscillation angular frequency 阻尼震荡角频率damped oscillation angular frequency 阻尼角damping angle带宽频率bandwidth frequency 穿越/截止频率crossover/cutoff frequency 谐振峰值 resonance peak系统校正 system compensation超前校正 lead compensation滞后校正 lag compensation自激震荡 self-excited oscillation死区特性 dead zone characteristic饱和特性 saturation characteristic间隙特性 backlash characteristic描述函数法 describing function method相平面法 phase plane method 采样控制系统 sampling control system数字控制系统 digital control system频谱 frequency spectrum 采样定理 sampling theorem信号重现 signal recurrence拉氏变换 Laplace transformZ变换 Z transform终值定理 final-value theorem差分方程 difference equation迭代法 iterative method 脉冲传递函数 pulse transfer function 零阶保持器 zero-order holder映射 mapping方框图 block diagram伯德图 Bode diagram特征方程 characteristic equation可控性 controllability临界阻尼 critical damping阻尼常数 damping constant阻尼比 damping ratio初始状态 initial state初值定理 initial-value theorem反Z变换 inverse Z-transformation负反馈 negative feedback正反馈 positive feedback 尼科尔斯图 Nichols chart部分分式展开partial fraction expansion 幅角原理argument principle相对稳定性 relative stability共振频率 resonant frequency劳斯表 Routh tabulation/array奇点 singularity渐进稳定性 asymptotic stability控制精度 control accuracy临界稳定性 critical stability耦合 coupling解耦 decoupling比例积分微分调节器proportional integral derivative regulator(PID) 串联校正 series/cascade compensation 单输入单输出 single input single output(SISO)多输入多输出 multi input multi output(MIMO)低通滤波器 low pass filter非线性系统 nonlinear system复合控制 compound control衰减振荡 damped oscillation主反馈 monitoring feedback 转折(交接)频率 break frequency 稳定焦点/节点 stable focus/node。
自动控制理论期末复习(知识点总结第四章-第五章)
Automatic Control Theory自动控制理论第四章 线性系统的根轨迹法根轨迹法是一种图解方法,它是经典控制理论中对系统进行分析和综合的基本方法之一。
由于根轨迹图直观地描述了系统特征方程的根(即系统的闭环极点)在s 平面上的分布,因此,用根轨迹法分析自动控制系统十分方便,特别是对于高阶系统和多回路系统,应用根轨迹法比用其他方法更为方便,因此在工程实践中获得了广泛应用。
1、根轨迹的基本概念闭环系统的稳定性取决于闭环系统的极点分布,其它性能取决于其零极点分布。
因此,可以用系统的零极点分布来间接研究控制系统的性能。
伊万思在1948年提出了一种在复平面上由开环零极点确定闭环零极点的图解方法——根轨迹法。
将开环系统的某一个参数(比如开环放大系数)的全部值与闭环特征根的关系表示在一张图上。
根轨迹定义开环系统传递函数的某一个参数从零变到无穷时,闭环系统特征方程的根在复平面上变化的轨迹。
研究根轨迹的目的:分析系统的各种性能(稳定性、动态和稳态性能) 相关术语:*01210121()()()()()()()()()()mim i nn jj s z b s z s z s z G s H s K a s p s p s p s p ==----==----∏∏❖ 开环零点:指系统开环传递函数中分子多项式方程的根 ❖ 开环极点:指系统开环传递函数中分母多项式方程的根 ❖ 根轨迹增益:K *为开环系统根轨迹增益❖ 闭环零点:指系统闭环传递函数中分子多项式方程的根 ❖闭环极点:指系统闭环传递函数中分母多项式方程的根1*11()()()()1()()()()nj j n mjij i G s s p G s s G s H s s p K s z ===-Φ==+-+-∏∏∏闭环零点由前向通道的零点和反馈通道的极点构成。
对于单位反馈系统,闭环零点就是开环零点。
闭环极点与开环零、极点以及根轨迹增益K*均有关。
自动控制原理中英文对照
自动控制原理中英文对照Automatic Control Principles 自动控制原理Introduction 简介Automatic control principles refer to the principles and theories that govern the design, development, and implementation of automated control systems. These systems are used in a variety of fields, including manufacturing, transportation, aerospace, and more. The goal of automatic control principles is to create systems that can operate independently and make decisions based on the input they receive.自动控制原理是指掌握设计、开发和实现自动控制系统的原理和理论。
这些系统应用于各种领域,包括制造业、交通运输、航空航天等。
自动控制原理的目标是创建能够独立运作并根据所接收的输入做出决策的系统。
Types of Control Systems 控制系统的类型There are two main types of control systems: open-loop and closed-loop. Open-loop systems are those that operate without any feedback, meaningthat they do not adjust their output based on the input they receive. Closed-loop systems, on the other hand, use feedback to adjust their output based on the input they receive.控制系统主要有两种类型:开环和闭环。
自控专业英语
latching relay 自锁继电器346. lathe 车床347. limit switch 限位开关348. moisture 潮气,湿度349. mount 安装350. octal-base 八脚的351. orifice 孔,注孔352. pedal 踏板,踏蹬353. phase sequence 相序354. piston 活塞355. pivot 轴,支点,旋转中心356. plunger 可动铁心,插棒式铁心357. pneumatic 气动的358. relay 继电器359. single-phase 单相的360. solenoids 螺线管361. solid-state relay 固态继电器362. spring 弹簧363. tap 抽头364. three-phase 三相365. timing relay 延时继电器366. toggle 搬扭,刀闸367. vibration 振动368. absolute encoder 绝对编码器369. accelerometer 加速度测量仪370. actuator 执行机构371. analog-to-digital conversion, ADC 模数转换器372. angular 角的373. auxiliary 辅助的374. as a rule of thumb 根据经验375. bellows 膜盒376. binary-coded decimal,BCD377. calibration 校准,标定,刻度378. cantilever 悬臂379. closed-loop 闭环■380. induction machine 感应式电机381. horseshoe magnet 马蹄形磁铁382. magnetic field 磁场383. eddy current 涡流384. right-hand rule 右手定则385. left-hand rule 左手定则386. slip 转差率387. induction motor 感应电动机388. rotating magnetic field 旋转磁场389. winding 绕组390. stator 定子391. rotor 转子392. induced current 感生电流393. time-phase 时间相位394. exciting voltage 励磁电压395. solt 槽396. lamination 叠片397. laminated core 叠片铁芯398. short-circuiting ring 短路环399. squirrel cage 鼠笼400. rotor core 转子铁芯401. cast-aluminum rotor铸铝转子402. bronze 青铜403. horsepower 马力404. random-wound 散绕405. insulation 绝缘406. ac motor 交流环电动机407. end ring 端环408. alloy 合金409. coil winding 线圈绕组410. form-wound 模绕411. performance characteristic 工作特性412. frequency 频率413. revolutions per minute 转/分414. motoring 电动机驱动415. generating 发电416. per-unit value 标么值417. breakdown torque 极限转矩418. breakaway force 起步阻力419. overhauling 检修420. wind-driven generator 风动发电机421. revolutions per second 转/秒422. number of poles 极数423. speed-torque curve 转速力矩特性曲线424. plugging 反向制动425. synchronous speed 同步转速426. percentage 百分数427. locked-rotor torque 锁定转子转矩428. full-load torque 满载转矩429. prime mover 原动机430. inrush current 涌流431. magnetizing reacance 磁化电抗432. line-to-neutral 线与中性点间的433. staor winding 定子绕组434. leakage reactance 漏磁电抗435. no-load 空载436. full load 满载437. Polyphase 多相(的)438. iron-loss 铁损439. complex impedance 复数阻抗440. rotor resistance 转子电阻441. leakage flux 漏磁通442. locked-rotor 锁定转子443. chopper circuit 斩波电路444. separately excited 他励的445. compounded 复励446. dc motor 直流电动机447. de machine 直流电机448. speed regulation 速度调节449. shunt 并励450. series 串励451. armature circuit 电枢电路452. optical fiber 光纤453. interoffice 局间的454. waveguide 波导波导管455. bandwidth 带宽456. light emitting diode 发光二极管457. silica 硅石二氧化硅458. regeneration 再生, 后反馈放大459. coaxial 共轴的,同轴的460. high-performance 高性能的461. carrier 载波462. mature 成熟的463. Single Side Band(SSB) 单边带464. coupling capacitor 结合电容465. propagate 传导传播466. modulator 调制器467. demodulator 解调器468. line trap 限波器469. shunt 分路器470. Amplitude Modulation(AM调幅471. Frequency Shift Keying(FSK)移频键控472. tuner 调谐器473. attenuate 衰减474. incident 入射的475. two-way configuration 二线制476. generator voltage 发电机电压477. dc generator 直流发电机478. polyphase rectifier 多相整流器479. boost 增压480. time constant 时间常数481. forward transfer function 正向传递函数482. error signal 误差信号483. regulator 调节器484. stabilizing transformer稳定变压器485. time delay 延时486. direct axis transient time constant直轴瞬变时间常数487. time invariant 时不变的488. transient response 瞬态响应489. solid state 固体490. buck 补偿491. operational calculus 算符演算492. gain 增益493. pole 极点494. feedback signal 反馈信号495. dynamic response 动态响应496. voltage control system 电压控制系统497. mismatch 失配498. error detector 误差检测器499. excitation system 励磁系统500. field current 励磁电流501. transistor 晶体管502. high-gain 高增益503. boost-buck 升压去磁504. feedback system 反馈系统505. reactive power 无功功率506. feedback loop 反馈回路507. automatic V oltage regulator(A VR)自动电压调整器508. third harmonic voltage 三次谐波电压509. reference V oltage 基准电压510. magnetic amplifier 磁放大器511. amplidyne 微场扩流发电机512. self-exciting 自励的513. limiter 限幅器514. manual control 手动控制515. block diagram 方框图516. linear zone 线性区517. potential transformer 电压互感器518. stabilization network 稳定网络519. stabilizer 稳定器520. air-gap flux 气隙磁通521. saturation effect 饱和效应522. saturation curve 饱和曲线523. flux linkage 磁链524. per unit value 标么值525. shunt field 并励磁场526. magnetic circuit 磁路527. load-saturation curve 负载饱和曲线528. air-gap line 气隙磁化线529. polyphase rectifier 多相整流器530. circuit components 电路元件531. circuit parameters 电路参数532. electrical device 电气设备533. electric energy 电能534. primary cell 原生电池535. energy converter 电能转换器536. conductor 导体537. heating appliance 电热器538. direct-current 直流539. self-inductor 自感540. mutual-inductor 互感541. the dielectric 电介质542. storage battery 蓄电池543. e.m.f = electromotive fore电动势544. unidirectional current 单方向性电流545. circuit diagram 电路图546. load characteristic 负载特性547. terminal voltage 端电压548. external characteristic外特性549. conductance 电导550. volt-ampere characteristics伏安特性551. carbon-filament lamp 碳丝灯泡552. ideal source 理想电源553. internal resistance 内阻554. active (passive) circuit elements有(无)源电路元件555. deviation 偏差556. leakage current 漏电流557. circuit branch 支路558. P.D. = potential drop 电压降559. potential distribution 电位分布560. r.m.s values = root mean square values 均方根值561. permanent magnet 永磁体562. effective values 有效值563. steady direct current 恒稳直流电564. sinusoidal time function 正弦时间函数565. complex number 复数566. Cartesian coordinates 笛卡儿坐标系567. modulus 模568. real part 实部569. imaginary part 虚部570. displacement current 位移电流571. trigonometric transformations 瞬时值572. epoch angle 初相角573. phase displacement 相位差574. signal amplifier 小信号放大器575. mid-frequency band 中频带576. bipolar junction transistor(BJT双极性晶体管577. field effect transistor(FET)场效应管578. electrode 电极电焊条579. polarity 极性580. gain 增益581. isolation 隔离分离绝缘隔振582. emitter 发射管放射器发射极583. collector 集电极584. base 基极585. self-bias resistor 自偏置电阻586. triangular symbol 三角符号587. phase reversal 反相588. infinite voltage gain 无穷大电压增益589. feedback component 反馈元件590. differentiation 微分591. integration 积分下限592. impedance 阻抗593. fidelity 保真度594. summing circuit总和线路反馈系统中的比较环节595. pneumatic 气动的596. Oscillation 振荡597. inverse 倒数598. admittance 导纳599. transformer 变压器600. turns ratio 变比匝比601. ampere-turns 安匝(数)602. mutual flux 交互(主)磁通603. vector equation 向(相)量方程604. power frequency 工频605. capacitance effect 电容效应606. induction machine 感应电机607. shunt excited 并励608. series excited 串励609. separately excited 他励610. self excited 自励611. field winding 磁场绕组励磁绕组612. speed-torque characteristic 速度转矩特性613. dynamic-state operation动态运行614. salient poles 凸极615. excited by 励磁616. field coils 励磁线圈617. air-gap flux distribution 气隙磁通分布618. direct axis 直轴619. armature coil 电枢线圈620. rotating commutator 旋转(整流子)换向器621. commutator-brush combination换向器-电刷总线622. mechanical rectifier 机械式整流器623. armature m.m.f. wave 电枢磁势波624. Geometrical position 几何位置625. magnetic torque 电磁转矩626. spatial waveform 空间波形627. sinusoidal-density wave正弦磁密度628. external armature circuit 电枢外电路629. instantaneous electric power瞬时电功率630. instantaneous mechanical power 瞬时机械功率631. effects of saturation 饱和效应632. reluctance 磁阻633. power amplifier 功率放大器634. compound generator 复励发电机635. rheostat 变阻器636. self - excitation process 自励过程637. commutation condition 换向状况638. cumulatively compounded motor 积复励电动机639. operating condition 运行状态640. equivalent T - circuit T型等值电路641. rotor (stator) winding 转子(定子绕组)642. winding loss 绕组(铜)损耗643. prime motor 原动机644. active component 有功分量645. reactive component 无功分量646. electromagnetic torque 电磁转矩647. retarding torque 制动转矩648. inductive component 感性(无功)分量649. abscissa axis 横坐标650. induction generator 感应发电机651. synchronous generator 同步发电机652. automatic station 无人值守电站653. hydropower station 水电站654. process of self - excitation 自励过程655. auxiliary motor 辅助电动机656. technical specifications 技术条件657. voltage across the terminals 端电压658. steady - state condition瞬态暂态659. reactive in respect to 相对....呈感性660. active in respect to 相对....呈阻性661. synchronous condenser 同步进相(调相)机662. coincide in phase with 与....同相663. synchronous reactance 同步电抗664. algebraic 代数的665. algorithmic 算法的666. biphase 双相的667. bilateral circuit 双向电路668. bimotored 双马达的669. corridor 通路670. shunt displacement current 旁路位移电流671. leakage 泄漏672. lightning shielding 避雷673. harmonic 谐波的674. insulator string 绝缘子串675. neutral 中性的676. zero sequence current 零序电流677. sinusoidal 正弦的678. square 平方679. corona 电晕,放电680. bypass 旁路681. voltmeter 电压表682. ammeter 电流表683. micrometer 千分尺684. thermometer 温度计685. watt-hour meter 电度表686. wattmeter 电力表687. private line 专用线路688. diameter 直径689. centimeter 厘米690. restriking 电弧再触发691. magnitude 振幅692. oscillation 振荡693. auxiliary 辅助的694. protective gap 保护性间隙放电695. receptacle 插座696. lightning arrester 避雷装置697. bushing 套管698. trigger 起动装置699. stress 应力700. deterioration 损坏,磨损701. spark gap 火花放电隙702. traveling-wave 行波703. wye-connected 星形连接704. enclosure 设备外壳705. live conductor 带电导体706. fuse 熔断器707. structural 结构上的708. out-of-step 不同步的709. resynchronize 再同步710. synchroscops 同步指示器711. automatic oscillograph 自动示波器712. nominally 标称713. sampling 采样714. potential transformer 电压互感器715. fraction 分数716. switchyard 户外配电装置717. hazard 危险718. bushing 高压套719. contact 触点720. energize 励磁721. trip coil 跳闸线圈722. over-current relay 过电流继电器723. armature 衔铁724. pickup current 始动电流725. release current 释放电流726. solenoid relay 螺管式继电器727. induction-disc relay 感应圆盘式继电器728. inverse time relay 反时限继电器729. hydraulic 液力的730. dashpot 阻尼器733. electrical stressing 电气应力734. mechanical stressing 机械应力■735. crystal 晶体的,水晶,晶体736. demodulation 解调737. derivative 导数738. diaphragm 膜片739. differentiation 微分740. discrete 离散的741. displacement 位移742. eddy 涡流743. encoder 编码器744. error 误差,偏差745. expedite 加速746. feedback 反馈747. feedforward 前馈748. forging 锻造749. hysteresis 磁滞750. immunity 抗扰性751. impedance 阻抗752. increment encoder 增量编码器753. inertia 惯性754. integration 积分755. interface 接口756. jerk 振动,冲击757. kinematic 运动的,运动学的758. longitudinal 经度了;纵向的759. manipulations 操作,控制,处理760. manipulator 机械手,操作器761. measurand 被测量,被测量对象762. modulation 调制763. multiplexer 多路转换器764. offset 偏心765. open-loop 开环766. orthogonal 垂直的,正交的767. perpendicular 垂直的,正交的768. photosensor 光电传感器769. piezoelectric 压电的770. plant 装置,设备771. potentiometer 电位器772. predominant 主要的,突出的773. prismatic 棱型的774. proximity 距离775. quantization 量化776. radial 径向的777. redundant 多余的,重复的778. representation 代表,表示779. resolver 解算器780. resonance 共振781. revolute 旋转的,转动的782. rig 设备783. robustness 鲁棒性784. rolling 轧制785. sampling period 采样周期786. signal-to-noise ration ,SNR信噪比787. strategy 策略788. subsequently 其后789. tachometer 测速仪790. terminology 术语,专门名词791. threshold 门,界限,阈值792. trajectory 轨迹793. transducer 传感器794. transient 瞬态的795. transistor-to-transistor logic,TTL 晶体管-晶体管逻辑796. transit 运输797. translatory 平移的798. algorithm 算法799. ambiguity 模棱两可800. antenna 天线801. arbitration 仲裁,公断802. autonomous 匿名的803. capacity 容量804. chao 混乱805. checksum 检查和806. circumnavigate 饶过807. client-server 客户-服务器808. client-server model 客户服务器模型809. corridor 通道,走廊810. decouple 解耦,去除干扰811. depict 描述812. distributed system 分布式系统813. dungen 地牢814. electronic mail 电子邮件815. entity 实体816. etiquette 规则817. exponential 指数818. fallout 余波,附带结果819. forward 转发820. full-duplex 全双工821. gamut 全体,整体822. goggles 护目镜,潜水镜823. half-duplex 半双工824. hierarchy 阶梯,等级825. host 主机826. infrastructure 基础,底层结构827. interactive 交互式828. interface data unit 接口数据单元829. inventory 存货,清单830. killer 迷人的831. newsgroup 新闻组832. object-oriented 面向对象的833. outgoing 外出了,离开的834. pointer 指针835. primitive 操作,原型836. process 进程837. propagation 传播,宣传838. protocol 协议839. protocol data unit 协议数据单元840. remote database 远程数据库841. remote login 远程登陆842. remote terminal 终端843. reprisal 报复844. router 路由器845. service data unit 服务数据单元846. simultaneous 同时的847. static allocation 静态分配848. subnet 子网849. taxonomy 分类学,分类850. telemedicine 远程医疗851. terminology 术语852. testbed 测试平台853. therapy 治疗854. token 令牌855. topology 拓扑学856. videoconference 可视会议857. virtual reality 虚拟现实858. worldwide shared 全球共享的859. wide area network 广域网860. actuator 执行器861. bar code reader 条码阅读器862. by-product 副产品863. call for 需要864. contiguous 邻近的865. culprit 犯罪者866. elusive 难以捉摸的867. filter 滤波器868. fluctuation 升降剥动,不规则的变化869. hardwired 硬接线的870. havoc 大破坏871. high-volume 大容量872. induction coupling 感应耦合873. inference 干扰874. injection molding 注模875. instruction set 指令集876. interconnection 相互连接877. isolation transformer 隔离变压器878. maintenance 维护879. multiple axis drive 多轴驱动880. pilot light 信号灯881. RF noise 射频干扰882. shock 冲击883. solenoid 线圈884. stand-alone 独立的885. stepper 步进电机886. thermocouple 热电偶887. troubleshoot 排除故障888. uninterruptible power supply 不间断电源889. vendor 生产厂商890. vibration 震动891. water-tight 防水892. wreak 发泄,报复893. configuration 组态894. Cyclic Redundancy Check 循环冗余检查895. electromagnetic interference 电磁干扰896. meticulous 详细的897. nonvolatile 非挥发的898. parity 校验899. peripheral 外设900. pharmaceutical 药剂,药品901. rack mounting 机架安装902. resident program 驻留程序903. spare 备用的904. standby 后备的905. volatile 挥发的,易失的906. watchdog timer 看门狗定时器907. distribution 分配,配电908. primary 最初的,基本的,初级线圈909. radial 径向的,辐射状的910. premise 上述各点,前言,根据911. residential 住宅的,居住的912. residence 住宅913. occupancy 占有,占用,居住914. tap 抽头915. establishment 组织,部门916. dwelling 住房917. panel 操纵台,面板918. laundry 洗衣房919. means 手段,工具920. condominium (国际)共官921. branch circuit 直路922. conduit 导线,导线管923. rigid 刚性的,坚固的924. clamp 夹,钳925. bolt 螺栓926. cubicle 立方体927. interrupter 断续(流、电、路)器928. margin 余量,裕度929. nuisance 障碍,公害930. receptacle 插座,插孔931. algebraic 代数的932. virtually 实际上,实质上933. fluorescent 荧光的,有荧光性的934. fixture 设备,装置]935. vicinity 附近,邻近,接近936. ballast 镇流器937. feeder 馈电线,电源线,馈电板938. ground-fault protector (GFP)939. ground-fault circuit interrupter(GFCI)接地故障保护器,接地故障断路器940. centrifugal 离心的,离心力941. whilst=while942. sphere 球体943. counteract 抵抗,抵消,消除944. joint 关节,铰链945. keyway 键槽946. pivot 轴,支点947. link 连杆948. throttle 节流阀,风门949. synthesis 综合物950. mass 物质,块,堆951. classic 古典的,经典的,传统的952. steer 驾驶,操纵,引导953. servomechanism 伺服机构,伺服系统954. actuate 激励,驱动955. intimately 紧密地,直接的956. academic 纯理论的957. dial 刻度盘,调节控制盘958. calibration 标定,标准化959. lubrication 润滑,注油960. arrangement 结构961. wear 磨损,损耗962. subtle 微妙的,巧妙的963. transducer 变送器964. hand-wheel 手轮,驾驶盘,操纵盘965. hydraulic 液压的,液压传动装置966. pneumatic 气动的,气动力学的967. electro-hydraulic 电动液压的968. electro-pneumatic 电动气动的969. coincidence 一致,相等970. faithful 正确的,可靠的971. fidelity 重现精度,真实,正确972. oscillatory 振动的,摆动的973. align 调整,校准974. profile 轮廓,仿行975. milling machine 铣床976. gyroscope 陀螺仪977. launcher 发生器,启动装置978. inertial 惯性的,惯量的979. electrolytic 电解的980. plate (电)镀981. distillation 蒸馏982. blend 混合,调和,配料983. philosophy 基本原理984. analytical 分析的,分解的985. orifice 侧流板,隔板986. diaphragm 膜,隔板987. knob 钮,圆形把手988. nomenclature 术语989. liable 有责任的990. autonomic 自治的991. grossly 大概,大体上的992. ideological 思想的993. morally 道德上,道义上994. boredom 讨厌,无趣995. deterioration 变化,降低品质996. ambient 环境的997. remarks 附注,要点998. differential pressure transducer差压变送器999. viscous 粘稠的1000.viscous friction 粘滞摩擦.1001.bearing 轴承1002.rolling mill 轧钢机1003.mine minder 矿坑卷扬机1004.velodyne 伺服积分器1005.feasible 可行的1006.regenerative braking 回馈制动1007.eddy current braking 涡流制动1008.dynamic braking 能耗制动1009.reverse braking 反接制动1010.advent 出现1011.prolong 延长1012.armature 电枢1013.contactor 接触器1014.hoist 起重机1015.field winding 励磁绕组mutator 换向器1017.riiple 纹动1018.creep 蠕动1019.tachogenerator 测速发电机1020.quadrant 象限1021.coast 跟踪惯性1022.profile 轮廓1023.conveyance 运输工具1024.lever 手柄,控制杆1025.forced commutation 强迫换流1026.ac squirrel cage induction motor交流笼型感应电动机1027.accutrol 控制器1028.stator 定子1029.rotor 转子1030.DC link 直流环节1031.Triac 双向晶闸管1032.Adjustable-voltage inverter 电压型逆变器1033.Current source inverter 电流型逆变器1034.refinement 明确表达1035.pros and cons 优缺点1036.cogging 齿槽效应.1037.retrofit 改型1038.damper 减速器1039.pitfall 缺陷1040.vernier 游标尺1041.jog 啮合1042.runout table 输出轨道1043.clinker-cooler 熟料冷却器1044.kiln 炉1045.grinder 磨床1046.pitch 齿轮1047.inventory 存货1048.cone pulley 塔轮,快慢轮1049.escalation 升级,提高1050.forced-draft 强制通风1051.induced-draft fan 吸风机1052.elbow 弯头可惜级别不够,不能上传附件,不知道能不能全发出来!一、自控专业用词汇Terms per process control流量Flow物位Level液位Liquid level温度Temperature压力Pressure分析Analysis指示Indicating记录Recording传递Transmitting控制Controlling调节Regulating信号Signaling联锁Interlocking积算Integrating遥控Remote controlling信号报警Alarming声光信号Acoustic and light signals 多点记录Multipoint recording多点指示Multipoint indicating集中检测Controlized measurement人工操作Manual operation测量范围Measuring range分度号Graduation输入Input输出Output刻度Scale等分刻度Equally divided scale等百分比Equal percent精度(指仪表) Precision精度(指测量) Accuracy流量特性Flow character(istic)线性(调节阀) Linear对数(调节阀) Logarithmic方根(指记录仪) Square root力矩(指执行器) Moment公称力矩(指执行器) Nominal moment行程(指执行器) Stroke常温Ambient temperature常压Atm. Pressure微分Derivative积分Integral上限值Upper limit下限值Lower limit取压点Pressure tapping point检测点Measured point取样点Sampling point正环室(指孔板) Plus carrier-ring负环室(指孔板) Minus carrier-ring均压环(指孔板) Pressure-equalizing ring 伴热管线Tracing pipe脉冲(导压)管线Impulse pipe负迁移Negative suppression正迁移Positive suppression保护管(指热电阻,热电偶) Sheath测温(保护)套(指设备带的) Thermowell 插入深度Insertion length(浸入深度) (Immersion length)仪表盘开孔Panel-board cut-out一次仪表Primary instrument二次仪表Secondary instrument现场(就地)安装Field (local) mounting盘装Panel mounting架装Rack mounting柱上安装Pole mounting侧面安装Side mounting盘面安装Surface mounting壁装Wall mounting滞后Lag易接近性Accessibility可见性Visibility(安装)位置(Mounting) location间隙Clearance接管Piping接线Wiring注字(指铭牌) Inscription二、温度测量仪表Temperature measuring instrument工业双金属温度计Industrial bimetallic thermometer玻璃水银温度计Mercury-in-glass thermometer电接点压力温度计Manometric thermometer with electric contacts光学温度计Optical pyrometer表面热电偶Surface thermocouple镍铬-镍硅热电偶Chromel-silicel thermocouple镍铬-镍铝热电偶Chromel-alumel thermocouple铂铑-铂热电偶Platinum-rhodium platinum thermocouple固定螺纹(普通式) 镍铬-镍铝热电偶Chromel-alumel thermocouple with fixed threaded bushing固定螺纹(防溅式) 镍铬-镍铝热电偶Splash-proof chromel-alumel thermocouple with fixed threaded bushing双支热电偶Twin thermocouple铠装热电偶Armored thermocouple铂热电阻Platinum resistance thermometer表面热电阻Surface resistance thermometer可动法兰普通式铂热电阻Platinum resistance thermometer with movable flange 温包Thermal bulb三、压力测量仪表Pressure measuring instrument弹簧管压力表Bourdon-tube manometer氨用压力表Ammonia manometer氨用电接点压力表Ammonia manometer with electric contacts隔膜压力表Diaphragm sealed manometer法兰膜片隔离式压力表Flanged diaphragm sealed manometer标准压力表Standard pressure gauge电接点弹簧压力表Bourdon-tube manometer with electric contacts 氨用真空表Ammonia vacuum-gauge膜片真空表Membrane vacuum-gauge风压表Output air pressure gauge膜盒式微压计Capsule-type micromanometer双波纹管差压计Differential pressure gauge with double bellows 活塞式压力计Piston type pressure gauge补偿微压计Compensating micromanometer带冷凝管压力表Manometer with condensing tube四、流量、液位测量仪表Flow & level measuring instruments椭圆齿轮流量计Ovalgear flowmeter湿式气体流量计Wet type gas flowmeter气远传转子流量计Pneumatic remote transmitting rotameter靶式流量计Target flowmeter玻璃转子流量计Glass type rotameter玻璃管液面计Glass-tube level gauge浮标式遥控测液位计Remote measuring float level meter环室标准孔板Standard orifice with carrier-rings标准孔板Standard orifice带柄平孔板Plate orifice with handle组合式高压孔板Assemble type HP orifice环室1/4圆喷嘴Quadrant nozzle with carrier-rings蜗轮流量变送器Turbine flow transmitter频率转换积算器Frequency transducer with integrator三阀体Three-valve manifold三通电磁阀Three-way solenoid valve小口径旋翼式冷水水表Rotating vane type cold water-meterTYQ-2型外浮筒液面调节器Type TYQ-2 external cage displacer level controller QBF3型单插入式法兰差压变送器Type QBF3 single insertion flanged differential pressure transimitter带平面(或槽面,凹面)密封面的节流装置Throttling device with flat (or grooved, female) sealing surface法兰上钻孔取压的节流装置Throttling device with drilled holeson flange带槽面(或凹面)环室取压的节流装置Throttling device grooved (or female) carrier-ring圆形均压环取压的孔板Orifice plate with circular pressure-equalizingrings五、显示仪表Displaying instruments旋转刻度自动平衡指示仪Self-balancing indicator with rotating scale长图自动平衡记录仪Strip-chart self-balancing recorder条形自动平衡显示仪Self-balancing strip indicator动圈式温度指示调节仪Moving coil type temperature indicating controller 小条型(自动平衡)指示仪Small strip-type (self-balancing) indicator指示压力调节器Indicating pressure controller六、分析仪表Analyzers磁氧分析器Paramagnetic oxygen analyzer红外线气体分析器Infrared type gas analyzer热磁式氢气分析器Thermal-conductivity hydrogen analyzer磁饱和稳压器Magnetic saturated voltage stabilizer稳压器(气体用) Manostat干燥器Drier过滤器Filter转子流量计Rotameter标准气钢瓶Standard gas cylinder压力调节器Pressure regulator气水分离器Knock-out drum放大器Amplifier七、气动单元组合仪表Instruments of the pneumatic aggregate二针一笔指示调节仪Double-point single-pen indicating & recording controller气动二针记录仪Pneumatic double-pen recorder气动一针记录仪Pneumatic single-pen recorder气动条形指示仪Pneumatic strip-type indicator气动色带指示仪Pneumatic colour-strip indicator气动温度变送器Pneumatic temperature transmitter气动压力变送器Pneumatic pressure transmitter气动绝对压力变送器Pneumatic absolute pressure transmitter气动法兰式差压变送器Pneumatic flanged differential pressure transmitter气动差压变送器Pneumatic differential pressure transmitter气动液位调节变送器Pneumatic level controller transmitter气动双法兰隔膜式差压变送器Pneumatic double-flange diaphragm separated type differential pressure transmitter 气动串级指示记录调节器Pneumatic cascade indicating and recording controller空气过滤减压阀Air pressure regulator-filter气动自锁阀Pneumatic self-locking valve大功率过滤器Large capacity filter气动阀门定位器Pneumatic valve positioner气动遥控板Pneumatic remote control station气动旁路遥控板Pneumatic by-pass remote control station气动付线板Pneumatic by-pass station五孔气插座Five-hole pneumatic socket气动加减器Pneumatic adder-subtractor气动继动器Pneumatic relay电-气转换器Electric-pneumatic transducer气动定值器Pneumatic loading station气动积算器Pneumatic intergrating counter比值变送器Ratio transmitter大功率减压阀Large capacity pressure regulator空气安全阀Air safety valve气动差压变送器Pneumatic differential pressure transmitter 变差Variation膜盒Capsule背压Back pressure膜片Diaphragm力平衡原理Force-balance principle主杠杆Force-bar拉条组件Tension assembly反馈波纹管Feedback bellows正(负)压室High (low) pressure chamber静压误差Static error反馈力矩Feedback monent静压轮Static aligement温度误差Temperature error牵移机构Elevation and depression unit隔离液Sealing liquid基准液面Reference level牵移弹簧depression spring抵消Balance out平衡状态Balance condition最大牵移范围Maximum range of elevation epression单门过载冲击Over pressure impact from either direction 拉滚,凹陷, 裂缝或腐蚀Soratched, cracks or erosion咬合深度Depth of jamming姿式误差Error position拉紧力应更大些Tighter ...... to great torque调压螺钉Pressure adjusting screw零点漂移Zero shoft故障现象Troubles恒节流孔Fixed restrictor波纹深度Depth of undulars回差大Exceeded variation输出缓慢Output slugglish负载容积Loading capacity查漏清堵Check for piping leaks & eliminate any clogs 输出振荡Vibrating of output行程误差Progressive error气动指示记录调节器Pneumatic indicating and recorder controller 串级记录调节器Cascade recording controller记录纸速度Chart speed笔记录式Continuous pen writing记录纸驱动机构Chart drive mechanism浮环Floating disc灵敏度Limitation of sensitibity平衡状态In equilibrium气(电)插座Air (electric) connecting plug阀芯Valve core报警指示器Alarm indicator微分阀Derivative restrictor比例加积分作用Proportional plus reset action积分阀Reset restrictor平面节流阀flat throttling valve反馈压力瞬间变化值Immediate change in feedback pressure自衡单元Automatic balancing unit扇形板Sector level平动-自动的切换装置Manual to automatic transfer给定与测量机构Set point unit and measurement receive assembly 同步误差Synchro error比例度Proportional band等速法Uniform velocity method阶跃法Step change method八、执行器Actuator气动薄膜调节阀Pneumatic diaphragm control valve流量特性:直线Flow characteristic: Liner对数Logarithmic信号压力Signal pressure公称力矩Nominal moment带手轮散热片阀门定位器With hand wheel , radiator & valve气闭Air to close气开Air to open快开式Quick-open type高压气动薄膜执行机构High pressure pneumatic diaphragm actuating mechanism气动活塞切断阀Pneumatic piston cut-off valve带手轮散热片With hand wheel , radiator气动长行程执行机构Pneumatic long-stroke actuating mechanism九、其他Other隔离器Sealing pot调压器Pressure regulator框架式仪表盘Frame type instrument panel-board with sides bend back半模拟仪表盘Semi-graphic instrument (panel-board)空白半模拟仪表盘Blank semi-graphic instrument panel-board左侧门Left side door右侧门Right side door直形橱式操纵台Console with wardrobe仪表箱Instrument box保温箱Heat insulated box仪表保护箱Instrument protecting box铭牌框Nameplate光字排Illuminated nameplate右开门左封闭柜式仪表盘Case type instrument panel-board with door at right side & left side enclosed十、仪表检验设备Calibrating devices for instruments低电位直流电位差计Low-potential D.C. potentiometer直流复射式检流计D.C. reflecting galvanometer便携式饱和标准电池Portable sturated standard cell高温管式电阻炉High temperature electric resistance tubular furnace单双臂两用直流Single-arm & double-arm (double-purpose) D.C. bridge携带式直流单臂电桥Portable single-arm D.C. bridge携带式直流电位差计Portable D.C. ptentiometer晶体管稳压电源Transistorized voltage stabilizer恒流可调信号源Constant current adjustable signal source超级恒温水浴Super-grade thermostat with water bath超级恒温油浴Super-grade thermostat with oil bath万用表Avometer标准电热偶Standard thermocouple标准铂电阻温度计Standard platinum resistantance thermometer 兆欧表Megameter直流毫安表D.C. milliammeter晶体管参数测试仪Transistor parameter tester标准水银温度计Standard mercury thermometer台式手绕线机Bench type hand winding machine十进位电阻箱Decad type resistance box旋转式直流电阻箱Rotary D.C. resistance box微调电阻箱Fine turning resistance box直流标准电阻D.C. standard resistance晶体管毫伏表Transistorized millivoltmeter电子交流稳压器Electronic A.C. voltage stabilizer超低频信号发生器Ultra low frequency signal generator真空表校验表Calibrator for vacuum gauges。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Module 15 Bode Diagrams Plot Bode Diagrams of elemental TFs Draw Bode diagram of a open loop TF Bode diagrams
Modulusfrequency plot Phase angle plot
ζ<-1 Amplitude
1.5 1 0.5 0 0
0<ζ<1
10
ζ=0
20
0.5
Time (sec.) ζ=1
1
5 ζ >1
10
15
2 Amplitude
1 Amplitude
1 Amplitude
1
0.5
0.5
0 0
10
20
30
0 0
5
10
15
0 0 5 1015202530354045
Time (sec.)
• 具有可控标准形的系统,一定是状态完全可控。 • 当A阵为对角阵且元素各异时,B阵不存在全零行,系统状态完全可控。
3. Determine the observability of system
• The system is observable if the rank of OT is n, the order of the system. • 具有可观测标准形的系统,一定是状态完全可观测。
Automatic Control Theory Review
Exam time: January, 2011 Exam place: C12
2010
本课程的两大基本内容
z
已知系统结构、参数, 对系统进行分析。
系统分析
z
已知系统性能要求,求系统 结构、参数,系统校正。
系统设计
分析系统的
¾ 稳定性 ¾ 稳态性能 ¾ 动态性能
Structure of the Textbook
Automatic control theory
Concepts, Principle Module 1 Maths base Module 2 Methods Module 3-25 Modern control theory Module 22-25 State-space Module 22-25 Models Module 22 Analysis Module 23 Design Module 24-25
Establish the state-space model Sketch the state-variable block diagram
Calculate the eigenvalues
M23. State space system response: Controllability and Observability 1. System stability 2. Determine the controllability of system • The system is controllable if the rank of CT is n, the order of the system.
Module 10-11 Rules for Plotting the Root Locus Apply these rules plot root locus analyze System performance
− 10
K = 0, 10, 25, 50, 100
Im
5i
Re
−5
Stability The range of K Transient response Steady state response
− 5i
Module 12-14 Frequency response Nyquist Diagrams, Nyquist Stability Criterion, and Nyquist Analysis Draw Nyquist diagram of a given TF system stability Nyquist stability criterion Concept of gain margin and phase margin The number of closedloop poles in righthand half s-plane
Module 6 Disturbance rejection, Velocity feedback Closed-loop feedback control velocity feedback reject disturbances improve the transient response ζ ↑⇒ σ % ↓, t s ↓ ωn
Knowing the desired poles Knowing the time-domain performance specifications
3. Plot the state-variable block diagram with state variable feedback.
M25. State-Space Observer Design
Module 4-5 Time domain response of second order systems Calculate time responses step response Time-domain performance specifications %Overshoot, rise time, peak time, settling time, steady state error.
¾ The Concept of the observer ¾ Observer design 1. Check the system observability Æ whether an observer may be used to estimate the state. 2. Calculate the observer gain vector K Æ locate the eigenvalues of the observer with respect to the desired poles of the system.
System poles ~ transient response
-1<ζ<0
ζ<-1
0<ζ<1
ζ=0
ζ=1
ζ >1
ω n2 G ( s) = 2 2 s + 2ζω n s + ω n
Step Response
100 Amplitude 0 -100 -200 0
-1<ζ<0
6 Amplitude 4 2 0 0
the openloop transfer function
Nyquist diagram
(For minimum-phase system, the red arrow is right.)
Module 16 Bode Analysis, Stability, and Gain and Phase Margins Gain margin Bode plots phase margin
Module 7 Higher order systems
Root locus
Dominant poles
Poles placement in state space form
Module 8 System type and Steady-state errors Identify system type Calculate steadystate errors Determine the stability of systems
− 60 dB / dec
M22. State space system description: MIMO systems
Knowing Selecting State variables
the differential equation
the transfer function
the block diagram
e ss ( t ) = lim sE ( s ) s→ 0
error constant Kp, Kv, Ka ess including the input and disturbance
Module 9 Routh Method the concept of stability the stability condition of LTI systems
Analyze the system stability
Analyze the system time response
Module 19 & 20 Phase Lead, Phase Lag and Lead-lag Compensation gain compensation phase lead compensation phase lag compensation lead-lag compensation
Module 1 Introduction to Feedback Control draw a block diagram representation identify elements
the plant, controller, transducer(s), differencing junction, input, output, and forward and feedback paths.
被控对象 被控量
传感器(测量装置)
Module 2 Transfer Functions and Block Diagram Algebra Develop dynamic models Derive transfer function Module 3 First order systems First-order systems Poles and zeros Dominant poles Block diagram Simplify complex block diagrams