(完整)中南大学电路理论历年考研真题(三)
中南大学数字电路习题与答案共69页
35、不要以为自己成功一次就可以了 ,也不 要以为 过去的 光荣可 以被永 远肯定 。
16、业余生活要有意义,不要越轨。——华盛顿 17、一个人即使已登上顶峰,也仍要自强不息。——罗素·贝克 18、最大的挑战和突破在于用人,而用人最大的突破在于信任人。——马云 19、自己活着,就是为了使别人过得更美好。——雷锋 20、要掌握书,莫被书掌握;要为生而读,莫为读而生。——布尔沃
中南大学数字电路习题与答 案
31、别人笑我太疯癫,我笑他人看不 穿。(名 言网) 32、我不想听失意者的哭泣,抱怨者 的牢骚 ,这是 羊群中 的瘟疫 ,我不 能被它 传染。 我要尽 量避免 绝望, 辛勤耕 耘,忍 受苦楚 。我一 试再试 ,争取 每天的 成功, 避免以 失败收 常在别 人停滞 不前时 ,我继 续拼搏 。
END
Hale Waihona Puke
电路试卷及答案

电路试卷及答案---○---○--- 学院专业班级学号姓名---○---○---…中南大学考试试卷………20 ~20 学年下学期电路理论课程时间100分钟线封密64 学时, 4 学分,闭卷,总分100分,占总评成绩 70 % 卷评题号一二三四五六合计……得分…………得分一、简算题:〔30分〕理处评卷人图示电路中,N为纯电阻网络,开关置于位置1时电分0压U=3V,置于位置2时U=1V,求开关置于位置3时U=。
〔7分〕按绩成3A+试考NU_者违+123_,1息_V2V+ 信生考写填准不外线封密,2、图示电路的负载电阻RL可变,试问RL等于何值时可吸收最大功率?题并求此最大功率。
答要_〔7分〕 i2i不+4Ω内线2Ω4i封密+2ΩRL …6V…_…………线封密卷评…………13、图示滤波电路,要求负载中不含基波分量,但5ω1的谐波分量能全部传送至负载。
如ω1=1 000rad/s,C=1μF,求L1和L2。
〔8分〕4、图所示电路中,理想变压器变比n=2。
求阻抗Z的最正确匹配值。
〔8分〕 j16Ωn:1A+iis+u+S__4iZ2HM3Hu2V_2得分二、如下图电路,参考结点已标注。
试求受控源吸收的功率。
〔14分〕评卷人 +2V_1S2S2S+3A7i1S1V_i1S4V_+3得分评卷人三、图示电路中,R1=R2=XL=100Ω,UAB=141.4 /0oV,两并联支路的功率PAB=100W,其功率因数为cosφAB=0.707 (φAB<0)。
求:(14分) 〔1〕该电路的复阻抗Z1;〔2〕端口电压U及有功功率P,无功功率Q和功率因数λ。
(3) 作出电路的相量图I R+ 1 A+ II2 1 R2U UAB Z1 -- XLB4得分四、图示对称三相电路,R?30?,XL?103?,XC??203?,且电源评卷人U.AB?1003?30?(V)。
求电流表及功率表的读数。
〔14分〕 jXLi2AL1jX0.5FCRjXAB*L+Wus*1H_2jXCRjXRCLIs 5。
中南大学数电考题全四套(含答案)
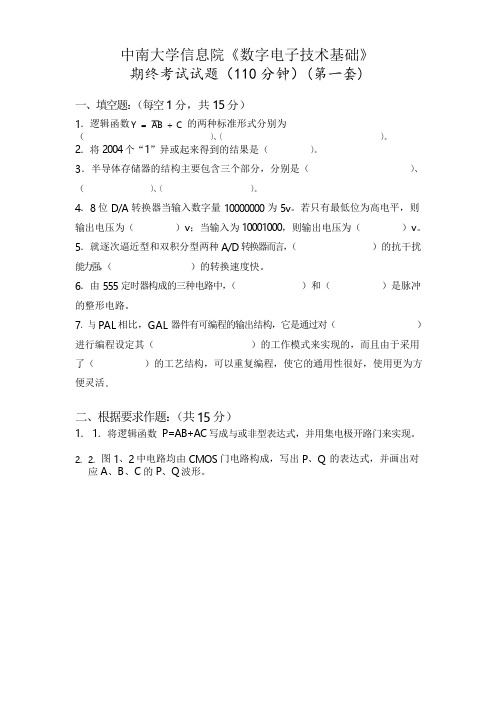
中南大学信息院《数字电子技术基础》期终考试试题(110分钟)(第一套)一、填空题:(每空1分,共15分)1.逻辑函数Y=AB+C的两种标准形式分别为()、()。
2.将2004个“1”异或起来得到的结果是()。
3.半导体存储器的结构主要包含三个部分,分别是()、()、()。
4.8位D/A转换器当输入数字量10000000为5v。
若只有最低位为高电平,则输出电压为()v;当输入为10001000,则输出电压为()v。
5.就逐次逼近型和双积分型两种A/D转换器而言,()的抗干扰能力强,()的转换速度快。
6.由555定时器构成的三种电路中,()和()是脉冲的整形电路。
7.与PAL相比,GAL器件有可编程的输出结构,它是通过对()进行编程设定其()的工作模式来实现的,而且由于采用了()的工艺结构,可以重复编程,使它的通用性很好,使用更为方便灵活。
二、根据要求作题:(共15分)1.1.将逻辑函数P=AB+AC写成与或非型表达式,并用集电极开路门来实现。
2.2.图1、2中电路均由CMOS门电路构成,写出P、Q的表达式,并画出对应A、B、C的P、Q波形。
三、分析图3所示电路,写出F1、F2的逻辑表达式,说明电路的逻辑功能。
图中所用器件是8选1数据选择器74LS151。
(10分)四、设计一位十进制数的四舍五入电路(采用8421BCD码)。
要求只设定一个输出,并画出用最简与非门实现的逻辑电路图。
(15分)五、已知电路及CP、A的波形如图5(a)(b)所示,设触发器的初态均为“0”,试画出输出端B和C的波形。
(8分)BC六、用T触发器和异或门构成的某种电路如图6(a)所示,在示波器上观察到波形如图6(b)所示。
试问该电路是如何连接的?请在原图上画出正确的连接图,并标明T的取值。
(6分)七、电路如图7所示,其中RA=RB=10kΩ,C=0.1μf,试问:1.在Uk为高电平期间,由555定时器构成的是什么电路,其输出U0的频率f0=? 2.分析由JK触发器FF1、FF2、FF3构成的计数器电路,要求:写出驱动方程和状态方程,列出状态转换表,画出完整的状态转换图;3.设Q3、Q2、Q1的初态为000,Uk所加正脉冲的宽度为T w=6/f0,脉冲过后Q3、Q2、Q1将保持在哪个状态?(共15分)八、图8所示是16*4位ROM和同步十六进制加法计数器74LS161组成的脉冲分频电路。
中南大学《电路理论》课程作业(在线作业)三及参考答案
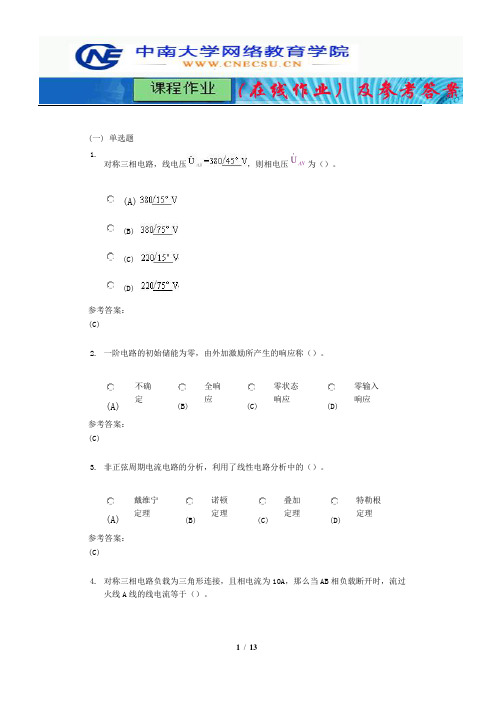
(一) 单选题1.对称三相电路,线电压,则相电压为()。
(A)(B)(C)(D)参考答案:(C)2. 一阶电路的初始储能为零,由外加激励所产生的响应称()。
(A)不确定(B)全响应(C)零状态响应(D)零输入响应参考答案:(C)3. 非正弦周期电流电路的分析,利用了线性电路分析中的()。
(A)戴维宁定理(B)诺顿定理(C)叠加定理(D)特勒根定理参考答案:(C)4. 对称三相电路负载为三角形连接,且相电流为10A,那么当AB相负载断开时,流过火线A线的线电流等于()。
(A)0A (B) 10A (C) 17.32A (D) 不确定参考答案:(A)5. 对于RC一阶电路,独立的初始值是()。
(A)电阻的电压(B)电阻的电流(C)电容的电压(D)电容的电流参考答案:(C)6. 对于RL一阶电路,独立的初始值是()。
(A)电阻的电压(B)电阻的电流(C)电感的电压(D)电感的电流参考答案:(D)7.在非正弦周期电流电路中,电感L的一次谐波感抗,那么三次谐波感抗为()。
(A)不确定(B) 30(C) 90(D) 10参考答案:(C)8. 对称三相电路中,电源中性点和负载中性点()。
(A)没关系(B) 等电位(C) 具有中性点位移参考答案:(B)9. RC电路如图2所示,则电路的时间常数为()。
图2(A)0.1S (B) 0.8S (C) 0.9S (D) 1S参考答案:(B)10. 非正弦周期电流电路的平均功率为()。
(A)(B)(C)参考答案:(C)11. 非正弦周期电流电路的电流有效值计算为()。
(A)(B)(C)参考答案:(C)12. 对称三相电路中负载为三角形连接,相电流为10A,当三角形连接负载等效变换成星形连接时,相电流等于()。
(A)0A (B) 10A (C) 17.32A (D) 30A参考答案:(C)13. 一阶RL电路如图1所示,则电路的时间常数为()。
(A)0.25S (B) 0.5S (C) 1S (D) 1.5A参考答案:(C)14. 对称三相电路,其中A相的平均功率和无功功率分别为1732W和1000Var,则电路的阻抗角等于()。
电路考研真题及答案

电路考研真题及答案一、选择题1. 在电路理论中,基本的电路元件包括:A. 电阻、电容、电感B. 电压源、电流源C. 电阻、电压源、电流源D. 所有上述选项答案:D2. 根据基尔霍夫电流定律,一个节点的电流之和为:A. 零B. 正无穷C. 负无穷D. 任意值答案:A二、简答题1. 请简述叠加定理的基本原理及其应用场景。
答案:叠加定理是电路分析中的一个重要定理,它指出在一个线性电路中,任何节点的电压或任何支路的电流都可以看作是由电路中各个独立电源单独作用时产生的相应电压或电流的代数和。
叠加定理适用于线性电路,可以简化复杂电路的分析过程,通过分别计算各个电源单独作用时的电路状态,然后进行叠加得到最终结果。
2. 解释什么是戴维南定理,并给出其在电路分析中的应用。
答案:戴维南定理是电路理论中的一个重要定理,它指出任何线性双端网络都可以用一个单一的电压源和一个串联电阻来等效替代,而不影响网络外电路的电压和电流。
电压源的电压等于网络两端的开路电压,串联电阻等于从网络两端看进去的等效电阻。
戴维南定理常用于简化复杂电路的分析,尤其是在需要计算网络对外部负载的影响时。
三、计算题1. 给定一个由电阻R1、R2、R3串联组成的电路,其中R1=100Ω,R2=200Ω,R3=300Ω,求电路的总电阻。
答案:串联电路的总电阻等于各个电阻值的代数和,即:\[ R_{总} = R1 + R2 + R3 = 100Ω + 200Ω + 300Ω = 600Ω \]2. 一个电路包含一个电压源Vs=10V和一个电阻R=5Ω,求通过电阻的电流I。
答案:根据欧姆定律,电流I等于电压V除以电阻R,即:\[ I = \frac{Vs}{R} = \frac{10V}{5Ω} = 2A \]请注意,以上内容仅为示例,实际的电路考研真题及答案会根据具体的考试大纲和题目要求而有所不同。
考生在准备考研时,应参考最新的考试大纲和历年真题进行复习。
中南大学网络教育电路理论复习题及参考答案
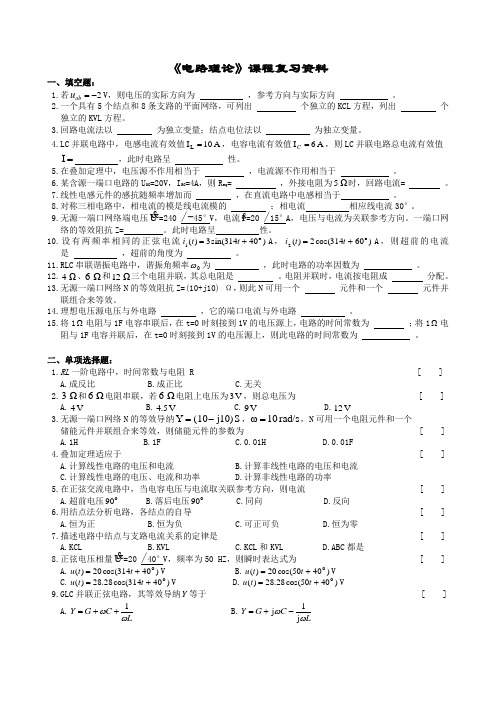
《电路理论》课程复习资料一、填空题:1.若2ab u =-V ,则电压的实际方向为 ,参考方向与实际方向 。
2.一个具有5个结点和8条支路的平面网络,可列出 个独立的KCL 方程,列出 个独立的KVL 方程。
3.回路电流法以 为独立变量;结点电位法以 为独立变量。
4.LC 并联电路中,电感电流有效值A 10I L =,电容电流有效值A 6I =C ,则LC 并联电路总电流有效值I = ,此时电路呈 性。
5.在叠加定理中,电压源不作用相当于 ,电流源不作用相当于 。
6.某含源一端口电路的U OC =20V ,I SC =4A ,则R eq = ,外接电阻为Ω 5时,回路电流= 。
7.线性电感元件的感抗随频率增加而 ,在直流电路中电感相当于 。
8.对称三相电路中,相电流的模是线电流模的 ;相电流 相应线电流30°。
9.无源一端口网络端电压U =240 /-45°V ,电流I =20 /15°A ,电压与电流为关联参考方向。
一端口网络的等效阻抗Z= 。
此时电路呈 性。
10.设有两频率相同的正弦电流)40314sin(3)(o 1+=t t i A ,)60314cos(2)(o 2+=t t i A ,则超前的电流是 ,超前的角度为 。
11.RLC 串联谐振电路中,谐振角频率0ω为 ,此时电路的功率因数为 。
12.Ω 4、Ω 6和Ω 12三个电阻并联,其总电阻是 。
电阻并联时,电流按电阻成 分配。
13.无源一端口网络N 的等效阻抗Z=(10+j10) Ω,则此N 可用一个 元件和一个 元件并联组合来等效。
14.理想电压源电压与外电路 ,它的端口电流与外电路 。
15.将1Ω电阻与1F 电容串联后,在t=0时刻接到1V 的电压源上,电路的时间常数为 ;将1Ω电阻与1F 电容并联后,在t=0时刻接到1V 的电压源上,则此电路的时间常数为 。
二、单项选择题:1.RL 一阶电路中,时间常数与电阻 R [ ] A.成反比 B.成正比 C.无关2.Ω 3和Ω 6电阻串联,若Ω 6电阻上电压为V 3,则总电压为 [ ] A.V 4 B.V .54 C.V 9 D.V 213.无源一端口网络N 的等效导纳S 10)j (10Y -=,rad/s 10ω=,N 可用一个电阻元件和一个储能元件并联组合来等效,则储能元件的参数为 [ ] A.1H B.1F C.0.01H D.0.01F4.叠加定理适应于 [ ] A.计算线性电路的电压和电流 B.计算非线性电路的电压和电流 C.计算线性电路的电压、电流和功率 D.计算非线性电路的功率5.在正弦交流电路中,当电容电压与电流取关联参考方向,则电流 [ ] A.超前电压o 90 B.落后电压o 90 C.同向 D.反向6.用结点法分析电路,各结点的自导 [ ] A.恒为正 B.恒为负 C.可正可负 D.恒为零7.描述电路中结点与支路电流关系的定律是 [ ] A.KCL B.KVL C.KCL 和KVL D.ABC 都是8.正弦电压相量U=20 /40°V ,频率为50 HZ ,则瞬时表达式为 [ ] A.)40314cos(20)(o +=t t u V B.)4050cos(20)(o +=t t u V C.)40314cos(28.28)(o +=t t u V D.)4050cos(28.28)(o +=t t u V9.GLC 并联正弦电路,其等效导纳Y 等于 [ ]A.LC G Y ωω1++= B.L C G Y ωωj 1j -+=C.LC G Y ωω1jj -+= D.L C G Y ωωj j -+= 10.已知无源一端口端网络的端口电压)4510cos(10)(o +=t t u V ,)1510cos(5)(o -=t t i A ,电压与电 流为关联参考方向,则此电路的功率因数等于 [ ] A. 0 B. 0.5 C. 0.866 D. 1三、计算题:1.求图1电路中电压u 。
中南大学往届电子技术试卷及答案
-——○--—○—————-○———○———………… 评卷密封线 ……………… 密封线内不要答题,密封线外不准填写考生信息,违者考试成绩按0分处理 ……………… 评卷密封线 ………… 中南大学考试试卷(1) 20 ~20 学年 1 学期 电子技术 课程 时间100分钟分,每小题2分) 1、电路如图所示,所有二极管均为理想元件,则D1、D2、D3的工作状态为( )。
A .D1导通,D2、D3截止; B .D1、D2截止,D3导通; C .D1、D3截止,D2导通; D .D1、D2、D3均截止; 2、存储器的电路结构中包含( )、存储电路和输入/输出电路(或读写控制电路)这三个组成部分. 3、已知Intel2114是1K * 4位的RAM 集成电路芯片,它有地址线( )条,数据线( )条。
4、右图所示波形反映的逻辑函数是( )。
(其中A 、B 为输入波形,Y 为输出波形) A .与非; B .异或; C .同或; D .或; 5、对功率放大电路的基本要求是在不失真的情况下能有( )。
A .尽可能高的电压放大倍数 B 。
尽可能大的输出功率 C 。
尽可能小的零点漂移6、位D/A 转换器当输入数字量10000000为5v.若只有最低位为高电平,则输出电压为( )v;当输入为10001000,则输出电压为( )v 。
7、已知被转换的信号的上限截止频率为10kHz ,则A/D 转换器的采样频率应高于( )kHz ;完成一次转换所用的时间应小于( ).三、四、二、简答题(24分)1.写出下图电路输出逻辑表达式.2.图中各触发器的初始状态Q=0,试画出在CP信号连续作用下各触发器Q端的电压波形。
6、如图所示为一555定时器应用电路(1)说明该电路的功能;(2)试画出电路的电压传输特性曲线.4.下图电路中,变压器副边电压有效值为2U2。
(1)画出u2、u D1和u O的波形;(2)求出输出电压平均值U O(AV)三、电路如图所示,晶体管的 =80,=1。
中南大学电路试卷及答案整合版
中南大学电路试卷及答案整合版(总36页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小-----○---○------○---○---学 院专业班级学 号姓 名………… 评卷密封线 ……………… 密封线内不要答题,密封线外不准填写考生信息,违者考试成绩按0分处理 ……………… 评卷密封线 …………中南大学考试试卷20 ~20 学年下学期 电路理论 课程 时间100分钟 64 学时, 6 学分,闭卷,总分100分,占总评成绩 70 % 题 号 一 二 三 四 五 六 合 计 得 分一、简算题:(30分)1、求下图电路的最简等效电源模型。
(7分)56413A+_2V ΩΩΩ图2+_78V2、已知图示正弦电流电路中电流表的读数分别为A 1:5A ;A 2:20A ;A 3:25A 求:(1)图中电流表A 的读数;(2)如果维持A 1的读数不变.而把电源的频率提高两倍,再求电流表A 的读数。
(7分)得 分 评卷人3、图示正弦电路,负载Z L 可调,试求Z L 等于多少时,可获得最大功率, 最大功率等于多少(8分)j10Ω5∠0○4、图所示电路,已知二端口网络N ’的Z 参数矩阵为, 试求二端口网络N 的Z 参数矩阵。
(8分)’⎥⎦⎤⎢⎣⎡='4332Z二、图示电路,使用结点电压法求CCCS 受控源的功率。
(14分)三、图示电路,N 是线性无源电阻网络。
直流电流源I S =1A 且发出3W 的功率,电源t u s cos 2 (V ),有效值电流表的读数为。
试求网络N四、图示对称三相电路,电源端的线电压U l =380V ,R=Ω,L X =11Ω,C X = -44Ω。
试求:(14分)(1)各线电流;(2)用二瓦计法测量电源端的三相功率,试画出接线图;(功率表串在A 、B 两条端线)(3)若B 相电容负载在“X ”处发生开路,计算此时两个功率表的读数。
(t)。
中南大学电工学第2章正弦交流电路_03
三、线电压与相电压的关系 1、Y接法
A +
IA
A
UA
– Y X Z
C UC
UA B UCA
设 U AN U A U0o UBN UB U 120o UCN UC U120o
B
IB I C U BC
N B C
UB
U AB U AN U BN U0o U 120 o 3U30 o U BC U BN U CN U 120 o U120 o 3U 90 o U CA U CN U AN U120 o U0o 3U150 o
(2) 三相负载不对称(RA=5 、RB=10 、RC=20 ) 分别计算各线电流 U 220 0 A IA A 44 0A RA 5
U 220 120 B IB A 22 120 A RB 10
U 220 120 C IC A 11 120 A RC 20
Δ 接 : U l U p , I l 3I p 1 P 3U l I l cosφ 3U l I l cosφ 3
注意: (1) 为相电压与相电流的相位差角(阻抗角),不要误以为 是线电压与线电流的相位差。
(2) cos为每相的功率因数,在对称三相制中即三相功率因数: cos A= cos B = cos C = cos 。
U A U0 U B U 120o U C U120o Z | Z | φ
UA UC
(NEW)中南大学信息科学与工程学院《940电路理论》历年考研真题汇编
目 录2014年中南大学940电路理论考研真题2013年中南大学940电路理论考研真题2012年中南大学940电路理论考研真题2011年中南大学940电路理论考研真题2010年中南大学940电路理论考研真题2009年中南大学940电路理论考研真题2008年中南大学940电路理论考研真题2007年中南大学440电路理论考研真题2006年中南大学440电路理论考研真题2005年中南大学440电路理论考研真题2004年中南大学440电路理论考研真题2003年中南大学440电路理论考研真题2002年中南大学433电路理论考研真题2001年中南大学433电路理论考研真题
2014年中南大学940电路理论考研真题。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(完整)中南大学电路理论历年考研真题(三)
编辑整理:
尊敬的读者朋友们:
这里是精品文档编辑中心,本文档内容是由我和我的同事精心编辑整理后发布的,发布之前我们对文中内容进行仔细校对,但是难免会有疏漏的地方,但是任然希望((完整)中南大学电路理论历年考研真题(三))的内容能够给您的工作和学习带来便利。
同时也真诚的希望收到您的建议和反馈,这将是我们进步的源泉,前进的动力。
本文可编辑可修改,如果觉得对您有帮助请收藏以便随时查阅,最后祝您生活愉快业绩进步,以下为(完整)中南大学电路理论历年考研真题(三)的全部内容。
大家按照一到五先点击右键另存为图片,然后打印,总共是45页,很有用的,每一年的按照知识点排在一起!!!!!。