ADAMS凸轮机构反转法的设计
ADAMS做凸轮的具体方法
题目:凸轮的设计(adams)学院:学院班级:机械设计制造及其自动化091学生姓名:学号: 000000 完成时间:2012 年 5 月 11 日成绩:机械原理P172 9-12已知凸轮基圆半径R0=30mm,推杆平底与导轨的中心线垂直,凸轮顺时针方向等速运动。
当凸轮转过120d时以余弦加速度运动上升20mm,再转过150d时,推杆又以余弦加速度回到原点,凸轮转过其余90d时,推杆静止不动。
求凸轮曲线。
根据机械原理知识求得:0-120d时,推程方程为S=10*(1-cos(1.5*30d*time))120-270时,回程方程为S=20*(1.8-time/5+1/(PI*2)*sin(2*PI/5*time-1.6*PI))270-360为静止期间IF(time-4:10*(1-cos(1.5*30d*time)),20,IF(time-9:20*(1.8-time/5+1/(PI*2)*sin(2*PI/5*time-1.6* PI)),0,IF(time-12:0,0,0)))创建过程1、启动ADAMS双击桌面上ADAMS/View的快捷图标,打开ADAMS/View。
在欢迎对话框中选择“Create a new model”,在模型名称(Model name)栏中输入:tuluen;在重力名称(Gravity)栏中选择“Earth Normal (-Global Y)”;在单位名称(Units)栏中选择“MMKS –mm,kg,N,s,deg”。
如图1-1所示。
2、设置工作环境2.1 对于这个模型,网格间距需要设置成更高的精度以满足要求。
在ADAMS/View菜单栏中,选择设置(Setting)下拉菜单中的工作网格(Working Grid)命令。
系统弹出设置工作网格对话框,将网格的尺寸(Size)中的X和Y分别设置成500mm和500mm,间距(Spacing)中的X和Y都设置成10mm。
基于ADAMS的凸轮机构设计及运动仿真分析_徐芳

!!!!!!!!!!!!!!"
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!" 【摘 要】 用大型运动学和动力学分析软件 ADAMS 完成尖顶直动从动件盘形凸轮机构设计和 !!!!!!!!!!!!!!"
实体造型 , 并对其进行运动分析和仿真 , 缩短了凸轮的设计周期并提高了设计质量 , 为凸轮机构的设 计分析提供一种有效的新方法。 关键词 : ADAMS ; 凸轮机构 ; 运动仿真 【Abstr act】 The design and modeling of dish cam with straight moving follower is given by the kinetics
转副之上创建一个每秒钟逆时钟旋转 360 度的旋转驱动。 这样 , 一个完整的凸轮机构仿真模型建立起来 , 如图 4 所示 , 从而可以 进行下一步的运动仿真分析。
20* (1 - cos (6/5*360d*time)),40,IF(time - 7/12:40,40,IF (time - 11/12: 40* (2.75 - 3*time +1/(2*pi)*sin (3*2*pi*time - 3.5*pi)),0,IF (time - 1: 0,0,0))))" 。
在模型上施加一定的运动约束副、 力或力矩的运动激仿真实例分析
利用 ADAMS 进行凸轮机构设计仿真的过程大致可分为凸 轮机构几何建模、 施加约束和载荷、 凸轮机构样机模型检验和 仿真结果后处理、 仿真结果比较分析, 多次仿真及优化设计等
2.1 已知条件
已知尖顶直动从动件盘形凸轮机构的凸 轮 基 圆 半 径 r0=60, 从动件行程 h=40, 推程运动角为 !0=150!, 远休止角 !s=60!, 回程运 动 角 !0' =120!, 近 休 止 角 为 !s' =30! ; 从 动 件 推 程 、 回程分别采用余 弦加速度和正弦加速度运动规律, 对该凸轮机构进行模拟仿 真 , 各阶段的运动规律如下 : ( 1) 从动件推程 运 动 方 程 。 推 程 段 采 用 余 弦 加 速 度 运 动 规 律 , 故将已知条件 !0=150!=5!/6 、 h=40mm 代入余弦加 速 度 运 动 规律的推程段方程式中 , 推演得到 :
凸轮反转法
v
v
B
R
2πR V=ωR
6)直动推杆圆柱凸轮机构 已知:圆柱凸轮的半径R ,从动
件的运动规律,设计该圆柱凸轮机构。
ω
s
3’ 4’ 5’
2’
6’
1’
7’
δ
12 3 4 5 67 8
-V
4’
3’
5’
v
2’
6’
β 1’
7’β'
s
12
34
5
6
7β" 8
2πR V=ωR R
7)摆动推杆圆柱凸轮机构
凸 轮 轮 廓 位移 上 的 点
反转角(凸轮转角)
凸轮不动,从动件反转
凸 轮 轮 廓 位移 上 的 点
反转角(凸轮转角)
凸轮不动,从动件反转
凸 轮 轮 廓 位移 上 的 点
反转角(凸轮转角)
凸轮不动,从动件反转
凸 轮 轮 廓 位移 上 的 点
反转角(凸轮转角)
凸轮不动,从动件反转
凸 轮 轮 廓 位移 上 的 点
13’ 14’
9 11 13 15
e -ω
ωA
k8k7k6 k05k4kk3k21
8’ 7’ 5’ 3’ 1’
1 3 5 78
9’ 11’ 12’
13’ 14’
9 11 13 15
e -ω
ωA
k8k7k6 k05k4kk3k21
e
-ω ωA
e
-ω ωA
e
-ω ωA
e
-ω ωA
e
-ω ωA
13’ 14’
9 11 13 15
15’
13’ 12’
15 14’14
ADAMS的入门例子凸轮机构的建模
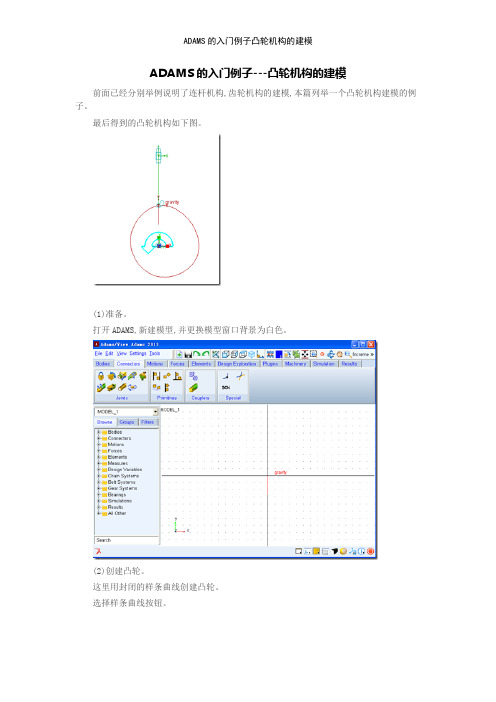
ADAMS的入门例子---凸轮机构的建模前面已经分别举例说明了连杆机构,齿轮机构的建模,本篇列举一个凸轮机构建模的例子。
最后得到的凸轮机构如下图。
(1)准备。
打开ADAMS,新建模型,并更换模型窗口背景为白色。
(2)创建凸轮。
这里用封闭的样条曲线创建凸轮。
选择样条曲线按钮。
注意细节窗口,选中CLOSED、然后在屏幕中点击8个点,形成凸轮的轮廓。
在点到8个点后,右键结束创建。
注意第一个点就是从坐标原点开始的,这样做的目的就是为了方便创建后面的推杆。
(3)创建推杆。
推杆用一根线段来表示。
选择下图所示的按钮,它就是用于创建多条连续线段的。
注意细节视图,选择就是ONE LINE。
就就是说创建一条直线。
然后在模型窗口中从坐标原点向上拉出一条线段,长短任意。
构件创建完毕。
(4)对凸轮与推杆重命名。
为了便于创建下一步的运动副,先修改这两个构件的名字,分别为TULUN,与推杆。
首先修改凸轮的名字。
选中凸轮,右键菜单中选择RENAME、弹出下图的对话框修改如下同理,把推杆的名称也进行修改展开左边的树形窗口的BODIES,可以瞧到名称已经修改为TUIGAN ,TULUN、(5)创建运动副首先就是凸轮与地面之间的转动副。
在下图所示的位置创建凸轮与地面之间的转动副,细节不再赘述。
然后在推杆与地面之间创建移动副。
移动副的位置就在推杆的终点,方向沿着推杆。
接着创建凸轮副。
找到点-线接触的凸轮副按钮如下图先找到推杆上与凸轮接触的点。
在接触出单击右键,弹出选择框。
在里面选择TUIGAN 上的这个点。
然后再选择凸轮上的曲线则凸轮副已经创建。
局部放大凸轮副,形状如下好,运动副创建完毕。
(6)施加驱动。
给凸轮上的转动副施加一个驱动。
过程不再赘述。
(7)运行仿真。
结果如下可见,凸轮机构的创建就是相对比较容易的事情。
基于ADAMS的凸轮机构参数化设计及精度仿真分析

1 凸轮机构的参数化建模
1. 1 凸轮机构的理想模型
凸轮机构的设计主要是对凸轮轮廓曲线的设
计 。凸轮的轮廓曲线取决于从动件运动规律 ,根据
工作要求选定推杆的运动规律 ,乃是凸轮轮廓曲线
设计的前提 。工程上常用的从动件的运动规律主要
有三角函数和多项式 2 大类 ,可根据实际需要进行
选择 ,也可对以上运动规律进项修正或重新设计从
代入式 ( 1) 可得 C0 = C1 = C2 = 0 , C3 = 10 h/δ30 ,
C4 = - 15 h/δ40 , C5 = 6 h/δ50 ,故其位移方程式为 :
S = 10 hδ3 /δ30 - 15 hδ4 /δ40 + 6 hδ5 /δ50
(2)
1. 2 参数化建模
凸轮的参数化建模采用运动表达式参数化和使
个球体 part , 在 cam create 对话框的 Ref Marker
Name 和 Ref Part Name 栏右击鼠标 ,从弹出的快捷
菜单中执行相应的命令 , 可以选取相应的 part 及
marker 点 ;对话框的其它栏中由于在宏命令中有默
认设置 ,所以系统已经显示了默认值 ,选择 O K 按
钮 ,即可生成一个属于该 part 的凸轮 。
推杆的参数化建模同上 ,编写宏命令生成对话
框 ,如图 2 所示 。通过改变输入参数实现推杆的参
数化建模 ,最终完成整个凸轮机构的建模 。在已建
好的凸轮上施加转动副和驱动 ,在凸轮廓线和推杆
尖顶之间添加高副 ,在推杆与机架之间施加移动副 ,
这样就可创建直动尖顶凸轮机构仿真模型 。
(1)
a = d v/ d t = 2 C2ω2 + 6 C3ω2δ+ 12 C4ω2δ2 +
凸轮轮廓设计反转法

凸轮轮廓设计反转法
凸轮轮廓设计反转法是一种常用于设计发动机机械运动部件的
方法。
该方法可以将凸轮轮廓的形状从一个已知的运动轨迹反推出来,进而得到完整的凸轮轮廓设计方案。
这种方法的基本原理是将凸轮轮廓的运动轨迹转化为坐标系上的一条曲线,然后通过数学反演的方法求出曲线的解析式,再将解析式转化为凸轮轮廓的设计方案。
凸轮轮廓设计反转法的优点在于可以通过已知的轨迹得到凸轮轮廓的设计
方案,避免了通过试验来进行设计的麻烦和成本。
同时,该方法可以对不同形状的凸轮轮廓进行设计,具有很高的通用性。
因此,凸轮轮廓设计反转法已经成为了机械设计领域中不可或缺的工具之一。
- 1 -。
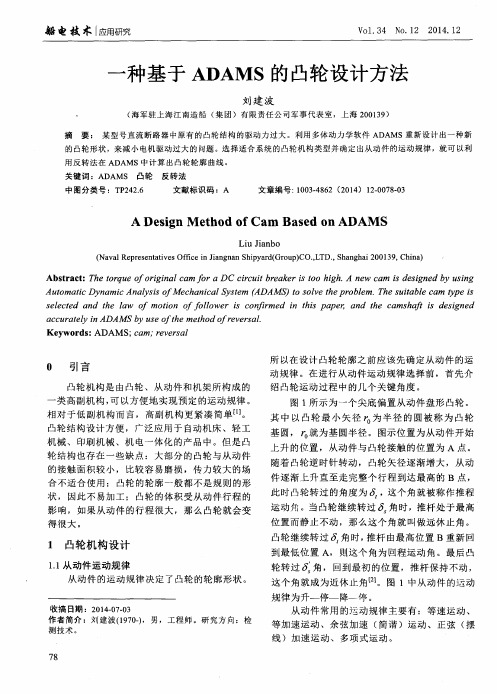
一种基于ADAMS的凸轮设计方法
凸轮继续转过 角时, 推杆 由最高位置 B重新 回
到 最 低 位 置 A,则这 个 角 为 回程 运 动 角 。最 后 凸 轮 转 过 角 , 回到 最 初 的位 置 , 推杆 保 持 不 动 , 这 个 角就 成 为 近 休 止 角 [ 2 1 。图 1中 从 动 件 的运 动 规律 为升 一 停一 降一 停 。
得很大 。
此 时 凸轮转 过 的 角度 为 ,这 个 角 就 被 称 作 推程 运 动 角 。当 凸轮 继 续 转 过 角 时 ,推 杆 处 于 最 高 位 置 而 静 止 不 动 ,那 么 这 个 角 就 叫做 远 休 止 角 。
l 凸轮机 构设 计
1 . 1从 动 件 运动 规律 从动 件 的运 动 规 律 决 定 了 凸轮 的轮 廓 形 状 。
A b s t r a c t : T h e t o r q u e o f o r i g i n a l c a m f o a DC c i r c u i t b r e a k e r i s t o o h i g h . A n e w c a m i s d e s i g n e d b y u s i n g
( Na v a l R e p r e s e n t a t i v e s Of ic f e i n J i a n g n a n S h i p y a r d ( Gr o u p ) C 0. , L T D. , S h a n g h a i 2 0 0 1 3 9 , C h i n a )
ADAMS凸轮机构的参数化及其优化

2.6凸轮机构的参数化设计及轮廓曲线优化此节以盘形凸轮为例进行介绍:传统的凸轮设计方法有图解法和解析法两种。
图解法简单,直观,但设计的精度有限;解析法的设计精度较高,但计算量比较大,往往需要编写复杂的计算机程序。
由于盘形凸轮比较简单,可直接用ADAMS/VIEW 作为软件平台来进行凸轮的参数化设计,利用其强大的仿真分析能力进行从动件的运动学分析,根据输出速度和加速度曲线的仿真结果对其运动规律进行修正,从而实现凸轮轮廓曲线的优化。
已知一尖端偏置移动从动件盘形凸轮机构。
已知凸轮的基圆半径等于100mm,偏距=20mm,凸轮沿逆时针方向以匀角速度=30d/s转动,从动件的位移运动规律方程如下:按等速速规律运动时的推程为:s=h-:180 「0 _ _180(7)按简谐规律运动时的回程为:.s=h-〉2 ‘1 cos[二一:一180 (扌「180)]? 180 _ - 360(8)对上述实例用ADAMS/View模块进行虚拟样机的建模,建模过程如下:1. 启动ADAMS/View。
2. 创建凸轮机构模型名称:tulunjigouca nshuhua3. 设置工作环境:保持系统默认单位值,设置工作网格,将size的x值设置为400,y值设置为400,将Spaci ng中的x、y值均设置为10。
设置工作图标,将New Size设置为20。
然后按F4,打开光标位置显示。
4. 创建尖顶从动件:(1)单击 ',设置参数如图2-113所示,点击(0, 0, 0)和(0, 20,0)两点。
将所创建的圆锥体重命名为follower。
(2)单击:」、,设置参数如图2-114所示,点击follower,再点击(0, 20,0),然后向上拖动光标,然后点击工作区域。
(3)单击也,在follower的尖端处创建一个add to part的标记点MARKER 。
,将follower 的尖端移动到(20, 98, 0)处。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
凸轮机构的设计
凸轮机构的设计一般采用反转法,是在选定从动件的运动规律和确定凸轮机构基本尺寸(基圆半径和偏距)的前提下,采用反转法原理设计出凸轮的轮廓曲线。
从动件运动规律:
S=(h/Φ)θ(0°≤θ≤180°)
S=(h/2)*(1+cos((pi/Φ)*(θ-180))) (180°≤θ≤360°)
其中,h=100mm,Φ=180,θ=ωt
运用IF(expr1:expr2,expr3,expr4)函数
启动ADAMS/View
启动ADAMS/View,选择“Create a new model”,在model name框中输入cam,如图,单击OK,进入工作界面。
修改工作栅格
在主菜单栏中,选择下拉菜单中,并将size中的x,y分别改为400,300,将spacing中的x,y改为10,10,如图
在工作屏幕区内随意单击一下,然后按F4,在工作区右下角显示坐标窗口。
创建从动件
1.在主工具箱中,单击圆锥工具图标
在参数设置栏中是,设置New Part: Length=ON,length=50,Bottom Radius=10,Top Radius=0.01,并在工作区内分别选择(0,50,0),(0,0,0)两点建立圆锥模型,如图
2.在主工具箱中,单击圆柱工具图标
在参数设置栏中选择Add to Part,Length=ON,Length=150,Radius=ON,Radius=10。
在工作区内单击圆锥体,然后单击Part_2 .Marker_1点创建模型。
如图
3.在主工具箱中,选择标记点工具图标
在参数设置栏中选择Add to Part,Global XY,然后在工作区内单击从动件,再单击(0,0,0)点,即可创建一个Marker点。
如图
移动从动件
在主工具箱中,选择偏移工具图标
选中从动件,在Translate中的Distance输入20,左移;输入98,上移。
工作区中的从动件将会做相关的移动。
如图
创建板
在主工具箱中,选择矩形工作图标
在其选项的length中输入400,height中输入400。
然后在工作区中选择点(200,200,0),单击即可创建该板。
如图
添加约束和驱动力
1.添加转动副,在主工具箱中,选择转动副工作图标
在construction中选择2 Bod-1 Loc和Normal To Grid,依次选择:板、地面、(0,0,0)点,完成设置。
如图
2.添加移动副,在主工具箱中,选择移动副工作图标
在参数设置栏,选择2 Bod-1 Loc和Pick Feature,依次选择:从动件、地面、POINT_2.cm,选择向上方向,完成设置。
如图
3.在主工具箱的运动工具集,选择旋转运动工具图标,显示定义旋转运动对话框。
默认Speed栏的值,选择JOINT_1,完成设置。
如图
4.在主工具箱的运动工具集,选择约束移动运动工具图标,默认Speed栏的值,选择JOINT_2,完成设置。
如图
右击移动运动,选择MOTION_2,单击Modify,对运动2做时间函数的修改。
在Function
(time)栏中点击,进入Function Builder对话框,选择constants & V ariables中IF,双击。
将IF函数改为IF(time-6:100/180*30*time, 100/180*30*time,50*(1+cos((pi/180)*(30*time-180)))),如图。
单击Verify,检查该式的正确,若错误,则回头检查该式;若正确,就单击OK。
在Joint Motion对话框中,单击OK,完成设置。
仿真分析
在主工具箱,选择仿真工具;在参数设置栏,选择Dynamic,取End Time=12,steps=100。
选择,开始仿真分析。
求出凸轮轮廓曲线
在主菜单栏的Review菜单,选择Create Trace Spline,在工作区内选择PART_2.MARKER_3和板,在工作栅格中将会出现凸轮轮廓曲线。
如图
对凸轮轮廓曲线进行拉伸
在主工具箱中,选取拉伸工具图标,在参数设置栏中,选择Create profile by中的
Curve,在length中输入10,在工作区中单击轮廓曲线,完成设置,如图
右击板,选择Block:BOX_3,在下拉菜单中选择Delete,删除板。
右击移动运动驱动,选择Motion:MOTION_2,在下拉菜单中选择Delete,删除移动运动驱动。
如图
创建凸轮副
在主工具箱中,选取凸轮副工具图标,在参数设置栏中,选择Curve,在工作区中选择POINT_2.MARKER_3和凸轮,完成设置。
如图
运动仿真
在主工具箱,选择仿真工具;在参数设置栏,选择Dynamic,取End Time=12,steps=100。
选择,开始仿真分析。
保存该模型。
总结
通过这个凸轮机构的设计实例,使我更加熟练的对ADAMS中的工具的操作,也学到了一下平常容易忽略的东西。
在创建凸轮机构过程中,我们在选择工具箱中的工具后,应该看看状态栏里的信息,它会提示我们如何操作。
同时我也遇到了一些问题,即在选择一些点的时候需要看清楚是哪个点,有时候有些Marker点很容易点错,所以这里是需要注意的。