网易APM hook方案探索-郑文
机械工程论文题目机械论文题目选题大全开题报告文献综述
基于 MATLAB 与 ADAMS 联合 仿真的双臂机器人协调技术研究 基于 RFID 图书盘点机器人结构设计与仿真 新型渐开线少齿差行星减速器的优化设计研究 用于制冷压缩机的直线振荡电机优化设计 基于 ADAMS 仿真分析的模块化弹簧操作机构优化设计 烤烟移栽机取苗方式研究及其栽植器的设计 岩石热损伤微观机制与宏观物理力学性质演变特征研究 旋流式无堵塞泵优化设计与内流场 PIV 试验研究 柔性空间机器人操作大挠性航天器的动力学与振动控制 回转式膜上辣椒钵苗移栽机构的优化设计与试验研究 膨润土基有机复合相变材料性能研究 氧化锌/碳纤维/聚醚醚酮复合材料的制备及性能研究 纤维素/聚乳酸复合材料的制备及其性能研究 电传动轮式装载机的试验样机搭建与控制策略研究 电力机械无级变速器优化设计与特性研究 基于 LabVIEW 的水轮机振动信号分析 挖掘机履带链轨节刚柔耦合仿真及疲劳失效分析 基于工作流引擎的办公自动化管理系统的设计与实现 洗衣粉污染土工程性质劣化机理及改良方法研究 基于物联网的提升机制动装置故障诊断系统及方法研究 方捆捡拾装载车的设计及捡拾机构固定夹臂的优化
大型焦炉推焦设备振动机理研究 大流量液控单向阀动态特性分析与流场仿真 对旋局部通风机振动与噪声研究 提升设备远程监测与故障诊断试验系统开发 提升设备工况监测与故障诊断网络试验平台 TA2 在溴化锂溶液中的空化腐蚀行为研究 振动/回转复合式滚磨光整加工装置的结构分析与实验验证 脉冲电流处理 ZK60 镁合金的组织演变、机械性能及其细化机理的研究 游乐设备挑臂梁设计及其结构优化与仿真分析 多功能茶叶包装机的设计研究 清香型酒曲制曲机设计及其性能研究 基于称重法的烟尘浓度在线监测系统的工程设计及实现 基于实时特征值的风机振动状态监测与数据挖掘的故障诊断研究 偏心轮推杆行星传动运动学仿真及设计研究 基于零空间追踪的机械故障诊断方法研究 基于分数阶时频分析的机械故障诊断方法研究 行星齿轮传动的故障动力学研究 泳池自动升降系统设计与控制研究 可升降泳池平台结构设计及力学特性研究 轴流泵马鞍区运行特性研究 气液两相条件下离心泵内部流动特性数值计算和试验研究 基于 MED-EMD 和切片双谱的齿轮箱故障诊断研究
国产化平台自主可控测试工具研究设计
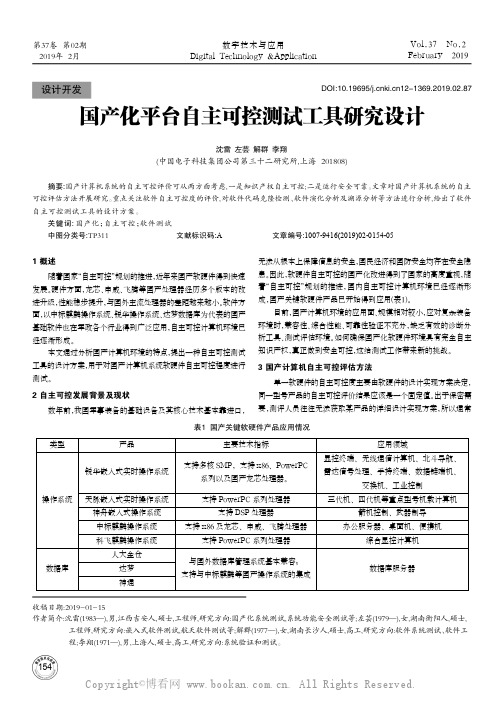
本文第3节对软件自主可控测试技术进行了详细说明,第4节 提出了自主可控测试工具的实现方案,第5节对关键技术做了简单 介绍。
4 软件自主可控测试技术研究
现有的软件代码分析技术主要包括以下几类: 4.1 代码克隆检测与代码相似性分析 国产化系统软件很多源于Linux开源项目,代码相似性分析对 国产软件评估有着十分重要的作用。 软件克隆研究包括克隆定义与分类、相似性分析、克隆管理以 及相关的实例研究与工具开发等。对于代码克隆分类,较普遍认可 的是Roy等人分为四类的提议[1]: 第一类指除空白和注释外完全相 同的代码片段,也称为精确克隆; 第二类指除空白、注释以及变量 名及常量值的变化外,语法结构完全相同的代码片段; 第三类指除 包含第二类克隆所涉及差异外,还存在少量语句增加、删除、修改的 代码片段,也称为近似克隆; 第四类指具有相同的语义,但采用不 同语法形式的代码片段。前三类克隆从文本相似的角度进行划分, 第四类则从功能相似的角度划分。 软件克隆检测包括两方面研究内容,即候选克隆片段的选取与 候选克隆片段的相似性分析。候选克隆片段的选取是决定整体克隆 检测速度的关键因素之一,一般可基于编程语言的语法结构选取克 隆片段。候选克隆片段的相似性分析也是决定整体克隆检测速度的 关键因素,可使用后缀树(suffix tree)和频繁子序列挖掘(frequent
综合显控计算机
数据库服务器
收稿日期:2019-01-15 作者简介:沈雷(1983—),男,江西吉安人,硕士,工程师,研究方向:国产化系统测试,系统功能安全测试等;左芸(1979—),女,湖南衡阳人,硕士,
工程师,研究方向:嵌入式软件测试,航天软件测试等;解群(1977—),女,湖南长沙人,硕士,高工,研究方向:软件系统测试、软件工 程;李翔(1971—),男,上海人,硕士,高工,研究方向:系统验证和测试。
基于IWOA算法求解并联冷机负荷分配问题

投 稿 网 址 \\\!0=01BX3^!1?U
Copyright©博看网. All Rights Reserved.
!!#!%&# #
计算机测量与控制!
第 $% 卷
""""""""""""""""""""""""""""""""""""""""""""""""""""
'&( 采 用 粒 子 群 算 法 !>Z.&7FT641BH=\FTU ?764U4^F64?2" 为了准确提取不 同 太 阳 能 光 伏 模 型 问 题 的 参 数& 提 出 了 一
>! 引 言
近年来在中国&建 筑 消 耗 了 大 约 "#b 的 一 次 能 源% 城 市建筑可以消 耗 高 达 &#b 的 城 市 一 次 能 源 % '%( 所 以 提 高 建 筑能源效率对于可持续发展至关重要%冷水机组通常服务 于商业建筑%作为中央空调系统的主要部件&冷水机组约 占商业建筑制冷 能 耗 的 $(b% 由 于 冷 水 机 组 能 耗 巨 大&因 此&如何在不同冷负荷下运行制冷机系统&使能耗最小化 成为一 个 重 要 的 问 题 % '"( 通 过 仔 细 设 计 和 运 行 冷 水 机 组& 发现多台冷水机组系统由不同性能特性和容量的冷水机组 成&因此各冷水机的最优负荷比组合成为一个有价值的研 究课题%
鸟撞发动机整机响应显式-_隐式仿真

航空发动机Aeroengine收稿日期:2021-09-23作者简介:姜凯(1997),男,硕士,研究方向为航空发动机结构仿真;E-mail :*****************。
引用格式:姜凯,陈伟,韩佳奇,等.鸟撞发动机整机响应显式-隐式仿真[J].航空发动机,2023,49(1):109-114.JIANG Kai ,CHEN Wei ,HAN Jiaqi ,et al.Explicit-implicit simulation of engine response under bird impact[J].Aeroengine ,2023,49(1):109-114.鸟撞发动机整机响应显式-隐式仿真姜凯,陈伟,韩佳奇,刘璐璐,赵振华,罗刚(南京航空航天大学,南京210016)摘要:为了研究鸟撞作为一种典型的突加高能载荷对航空发动机关键承力构件和发动机结构安全性的影响,以某大涵道比涡扇发动机为研究对象,针对其在遭遇鸟撞后不同响应阶段的特点,使用建模软件UG 和商用仿真软件Hypermesh 和LS-DYNA ,开发了1套鸟撞突加高能载荷作用下发动机整机动态响应分析模型,建立了航空发动机整机显式或隐式长时分析流程和方法,对比了不同分析方法的优缺点,验证了不同方法在鸟撞后发动机不同动态响应阶段整机响应规律研究中各自的优越性。
结果表明:鸟撞击对航空发动机的影响主要体现在撞击阶段的叶片变形和后撞击响应阶段的不平衡载荷对承力构件的影响,且采用显式-隐式结合的方式进行分析具有较好的效果。
该研究结果对于航空发动机在其他突加高能载荷作用下不同动态响应阶段的整机动态响应规律研究具有一定参考价值。
关键词:鸟撞;整机响应;突加高能载荷;长时分析;载荷传递;轴心轨迹;航空发动机中图分类号:V231.9文献标识码:Adoi :10.13477/ki.aeroengine.2023.01.015Explicit-implicit Simulation of Engine Response Under Bird ImpactJIANG Kai ,CHEN Wei ,HAN Jia-qi ,LIU Lu-lu ,ZHAO Zhen-hua ,LUO Gang(College of Energy and Power ,Nanjing University of Aeronautics and Astronautics ,Nanjing 210016,China )Abstract :In order to study the impact of bird strike as a typical sudden high-energy load on the safety of aeroengine key load-bearing components and engine structure,a large bypass ratio turbofan engine was taken as the research object.Aiming at the characteristics of dif⁃ferent dynamic response stages of bird strike,using modeling software UG and commercial simulation software Hypermesh and LS-DYNA,a set of dynamic response analysis model of the whole engine under sudden high-energy load like bird strike was developed,the explicit or implicit long-term analysis process and method were established ,and the advantages and disadvantages of different analysis methods for studying the engine response under sudden high-energy load was compared.Their superiority of different methods in the study of engine re⁃sponse laws in different dynamic response stages after a bird strike were verified.The results show that the influence of bird impact on aero⁃engine is mainly reflected in the blade deformation in the impact stage and the influence of unbalanced load in the post impact response stage on the load-bearing components,and the combination of explicit and implicit analysis is comparatively effective.The research result is a valuable reference for the study of whole engine dynamic response law of the in different dynamic stages under other sudden high-ener⁃gy loads.Key words :bird strike ;engine response ;sudden high-energy load ;long-term analysis ;load transfer ;axis center trajectory ;aeroengine0引言飞机在服役期间经常会遭遇鸟撞事件,由于飞机发动机迎风面积占飞机迎风面积的比例较大,且发动机对外物有着巨大的吸力,因此绝大部分鸟都会撞到发动机上导致发动机出现高能载荷突增的工况,使其安全性受到很大影响。
基于规则的无人机集群区域协同搜索算法
过的区域进行重复搜索;规则 5) 让无人机具有一个随机运动的趋势,使得无人机集群在理论上能以概率
1 对目标区域实现全覆盖;规则 6) 保证无人机不会飞出目标区域。 假设第 i 架无人机在 t 时刻的速度和位置分别为 vit 和 xit ,根据以上运动规则,则有:
vxitit++=11 =vxitit
Computer Science and Application 计算机科学与应用, 2019, 9(11), 2028-2036 Published Online November 2019 in Hans. /journal/csa https:///10.12677/csa.2019.911228
针对现有算法存在的以上不足,本文做了一些探索,提出了一种基于局部规则的集群区域协同搜索 算法。该算法借鉴了自然界自组织生物群体的运动规则,设计了离心、无序、分离、惯性和随机等六个 规则及相应的搜索算法,使无人机能够迅速有效地扩散到目标搜索区域,并且对于搜索过的区域,未来 某个时刻可进行重复搜索。该算法在理论上能以概率 1 对目标区域实现全覆盖,并且具有计算简单、鲁 棒等特点,适用于环境规划复杂、无人机数量规模大、搜索区域宽广的任务场景。本文通过仿真对提出 的算法的有效性进行了验证。
Open Access
1. 引言
相对有人机,无人机具有无人员伤亡、成本低、适应复杂环境作业等诸多优越性能,更适合执行 4D (Dull, Dirty, Dangerous and Deep)任务[1],而相对于单个无人机,多无人机集群则更加灵活,容错性也更 好,能满足多种任务的需要,其中区域协同搜索是其中一种重要的任务类型,比如人员搜救、情报侦察 和森林救火等。该类型的任务主要有两个方面研究侧重:一是以较小的搜索代价对特定区域内可能存在 的目标进行搜索;二是合理地控制多个无人机,使得区域搜索覆盖率最大,本文的研究属于第二种。
IE UPPH提升专案

進度 改善後(预 计)
專案小組成員
已結案
人力
8
產能
400
UPPH
50
UPPH提升% 25%
IE:张秀芳
Thank you
8
目标
提升UPPH
施行日期
7/12
人力
改善前
产能 220
UPPH 5.5
40
改善方 案
1、參照8Q40N机型,与资讯同事验证并推出新版本扫描模块,使之接收不同位数及 编码规则的差异;省掉粘附、扫描、撕除的动作,用之前粘附、扫描贴纸的作业时间
分摊其他工站动作,预计人力节省一人;同时节省了贴纸成本
2、整機袋尺寸修改,減少1人封口。
2016 IE UPPH提升專案
UPPH提升专案
所选机型
CDN6-7581
目标
UPPH提升10%
施行日期
3/1
人力
改善前
产能 200
UPPH 4.08
49
改善方 1、测试岗位合并——已经OK,3/9已经执行
案
2、包装贴纸精简&组装导槽合并——还在于供应商谈价格中
3,包装取消一人作业,合并岗位——草拟SOP已经实施
2,贴贴纸/检查对应关系與整机装盒/放附件,合併為一人; 3,將加工外箱與稱重/封箱/堆棧板,合併為一人。
进度 改善后成 (完成) 专案小组成 员
SOP已標準化,生產已經執行!
人力 38
产能 120
UPPH 3.48
實際提升 7.89%
生產:梁學偉
IE:譚金鳳
STB UPPH提升专案
所选机型
8G44H
产能
UPPH
21人
19人
Omega学习手册
Omega学习手册Omega学习手册 0前言 (9)第一章陆地观测系统定义 (10)1.0 技术讨论 (10)1.1 模块简介 (10)1.2 Database and Line Information 观测系统和测线信息 (15)1.3 Geometry Database Creation 观测系统数据库创建 (15)1.4 Primary and Secondary Data Tables (16)1.5 Pattern Specifications (16)1.6 Field Statics Corractions (16)1.7 Trace Editing 道编辑 (19)第二章静校正 (24)第一节2-D 折射静校正(EGRM) (24)1.0 技术讨论 (24)1.1 简介 (24)1.2 第一步——对拾取值进行处理 (25)1.3 第二阶段---建立折射模型 (37)1.4 第3步——计算静校正 (46)1.5 特别选件 (49)1.6 海洋资料处理要考虑的因素 (53)1.7 控制手段 (53)参考文献: (63)3.0 道头总汇: (63)第二节三维折射波静校正 (64)1.0 技术讨论 (64)2.0 二维与三维折射静校正方法 (64)1.2 折射静校正计算原理 (65)1.3 初始值的给定 (67)1.4 最小二乘法延迟时的计算 (67)1.5 iterations (75)1.6 Diving Waves (81)1.7 建立折射模型 (84)1.8 uphole options (86)1.9 water uphole corrections (87)1.10 用井口信息修正风化层速度 (88)1.11 静校正量的计算 (89)1.12 地表基准面和剩余折射静校正 (90)1.13 定义偏移距范围 (91)1.14 定义速度 (91)1.15 延迟时控制 (92)1.16 观测系统、辅助观测系统和一些道头字的输入要求 (92)1.17 输出的库文件和道头字 (96)第三节反射波剩余静校正(miser) (97)2.0 地表一致性剩余静校正 (98)3.0 非地表一致性静校正 (102)第四节反射波最大叠加能量静校正计算 (103)1.0 模块简介: (104)2.0 应用流程: (105)3.0 分子动力模拟法的理论基础: (106)4.0 模块中参数的设计 (106)5.0 应用实例及效果分析 (110)第五节波动方程基准面校正 (113)1.0 技术讨论 (113)1.1 理论基础 (115)1.2 波动方程层替换的应用 (117)1.4 模块算法 (118)1.5 应用的方法 (120)第三章地表一致性振幅补偿 (127)第一节地表一致性振幅补偿–拾取(1) (127)1.0 技术讨论 (127)1.1 概况 (127)1.2 地表一致性振幅补偿流程 (128)1.3 振幅统计 (128)1.4 预处理/道编辑 (129)1.5 自动道删除 (129)1.6 模块输出 (130)1.7 分析时窗 (130)2.0 道头字总结 (131)3.0 参数设置概要 (131)4.0 参数设置 (131)4.3 Amplitude Reject Limits (132)第二节地表一致性振幅补偿–分解(2) (133)目录 (133)一、技术讨论 (134)二、道头字总结 (148)三、参数设置概述 (148)四、参数设置(简) (148)第三节地表一致性振幅补偿–应用(3) (149)目录 (149)一、技术讨论 (150)1.1 背景 (150)1.2 SCAC处理过程的流程图 (150)1.2.1 HIDDEN SPOOLING (151)1.3 模块概论 (152)二、道头字总结 (152)三、参数设置概述 (152)五、参数设置(略) (153)5.1 General (153)5.2 SCAC Term Application (153)5.3 Printout Options (153)第四节剩余振幅分析与补偿 (153)1.0 技术讨论: (153)1.1 背景 (154)1.2 模块的输入和输出 (155)1.3 分析过程概述 (155)1.4 分析参数表 (159)1.5 设置网格范围 (164)1.6 分析用时间门参数设定 (166)1.7 时空域加权 (167)1.8 打印选项参数设置 (168)1 .9 应用过程综述 (168)1.10 应用参数设置 (171)1.11 应用时间门参数设置 (173)1.12 RAC函数的质量控制 (174)1.13 在振幅随偏移距变化(A VO)处理中的注意事项 (175)1.14 背景趋势推算 (176)2.0 道头字总结 (176)3.0 参数设置摘要 (176)4.0 设置参数 (176)4.1 Units (176)4.2 General (176)4.3 Analysis (177)Primary Auto Range: (180)Secondary Auto Range: (180)4.6 Primary Manual Range 用于划分面元的首排序范围确定(手动设置) (180)4.7 Secondary Auto Range:用于划分面元的次排序范围确定(手动设置)1804.8 Analysis Time Gates :分析时间门参数(可选) (181)4.9 Temporal Smoothing Weights at Top of Data (可选) (181)4.10 Temporal Smoothing Weights at Bottom of Data(可选) (181)4.11 Primary Spatial Smoothing Weights(可选) (182)4.12 Secondary Spatial Smoothing Weights(可选) (182)4.13 Application (182)4.14 Application Time Gates (183)5.0 参考流程 (183)第四章 (185)第一节瞬时增益 (185)1.0 技术讨论 (185)第二节指数函数增益 (188)1.1 背景 (188)1.2 梯度平滑 (189)2.0 道头总结 (191)3.0 参数设置概要 (191)4.0 参数设置 (191)4.1 General (191)5.0 应用实例 (192)第四章反褶积 (195)第一节地震子波处理(SWP)指导 (195)辅导班Tutorial (195)辅导班1 快速漫游(Quick Tour) (195)概要 (195)快速漫游: 基本训练 (195)辅导班2 –a 为信号反褶积准备一个子波 (203)辅导班2 –b 从野外信号中消除原始的仪器响应影响 (204)辅导班2–c 建立新的仪器响应和新的整形算子 (209)辅导班2– d 将滤波器保存到带通滤波作业文件中 (211)辅导班3用尖脉冲的逆做特征信号反褶积 (213)第二节子波转换应用指导 (215)子波训练 (215)第三节地表一致性反褶积分析 (218)地表一致性谱分解 (225)地表一致性反褶积算子设计 (249)反褶积算子的应用 (255)第四节谱分析 (273)第五节地表一致性反褶积分析 (297)第六节地表一致性谱分解 (302)第八节地表一致性反褶积算子设计 (320)第九节反褶积算子的应用 (325)第六章动校正 (345)第一节视各向异性动校正 (345)第七章各种理论方法简介 (355)第一节层速度反演方法简介 (355)1.1 层速度反演的几种方法 (355)1.1.1 相干反演 (356)1.1.2 旅行时反演 (357)1.1.3 叠加速度反演 (358)2.1 二维层速度反演 (359)2.1.1 相干反演计算的偏移距范围 (359)2.1.2 单个CMP位置超道集的选择 (359)2.1.3 相干反演中的互相关 (360)2.1.4 不确定值 (360)2.1.5 速度的横向变化 (360)3.1 三维层速度反演 (361)3.1.1 方位角范围 (361)3.1.2 相干反演 (362)3.1.3 叠加速度反演 (363)3.1.4 方位角 (364)3.1.5 DMO (364)3.1.6 射线追踪 (364)第二节射线偏移方法简介 (365)1.1 射线偏移 (365)1.2 向射线偏移与成像射线偏移 (367)第三节层位正演方法简介 (368)1.1 层位正演 (368)1.2 零偏移距正演 (369)1.3 成像射线追踪-从深度域到时间偏移域的零偏移距正演 (369)1.4 CMP射线追踪 (371)1.5 CRP正演 (371)1.6 3D正演 (372)1.7 速度正演 (372)1.8 浮动基准面与静校正的处理 (372)第四节扩展STOLT--FK 偏移 (373)概述 (373)1.0 技术讨论 (373)1.1 背景 (374)1.2 扩展STOLT算法 (374)1.3 扩展STOLT偏移的推荐参数 (376)1.4 截断速度和W因子 (377)1.5 框架速度(frame velocity) (378)1.6 速度的横向变化 (378)1.7 速度输入 (378)1.8 三维偏移 (379)1.9 反偏移 (379)1.10 反偏移到零偏移距的处理 (379)1.11 充零方式镶边 (380)1.12 边界处理 (380)1.13 频率内插 (381)1.14 随机波前衰减 (381)1.15 三维偏移中少道的情形 (381)1.16 时间内插 (381)第五节DMO 准备模块 (381)概述: (382)1.0 技术讨论: (382)1.1 理论基础 (382)1.2 递进叠加文件 (382)1.3 速度监控和非矩形网格 (383)1.4 倾角加权表 (383)1.5 统计分析 (383)1.6 层位属性分析 (384)1.7 位图化(Bitmapping) (384)1.8 均衡DMO (384)1.9 限定边界DMO (385)1.10 随意边界DMO (386)1.11 3D DMO Monitor (389)DMO 倾角校正 (390)(DMO X-T STACK)(2) (390)概述: (390)1.0 技术讨论 (390)1.1 简介 (390)1.2 递进叠加 (390)1.3 倾角时差校正(Dip Moveout)-DMO (391)1.4 处理类型 (392)1.5 DMO应用模式 (392)1.6 算子设计 (393)1.7 递进叠加文件 (393)1.8 固定边界和随意边界中的分片段叠加 (393)1.9 运行时间 (394)1.10 DMO处理流程 (394)DMO 输出模块 .............................................................................................................. - 396 - (DMO X-T OUT)(3)........................................................................................................ - 396 - 第八章多波多分量................................................................................................................ - 397 - 第一节多分量相互均衡.............................................................................................. - 397 -1.0 技术讨论......................................................................................................... - 397 -1.1 引言................................................................................................................. - 397 -1.2 数据的输入/输出............................................................................................ - 397 -1.3 背景介绍......................................................................................................... - 398 -1.4 原理................................................................................................................. - 398 -1.5 道头字集......................................................................................................... - 400 -1.6 三维实例......................................................................................................... - 401 -1.7 操作指南......................................................................................................... - 404 -第二节S波两分量旋转合成....................................................................................... - 408 -1.1 引言................................................................................................................. - 408 -1.2 背景介绍......................................................................................................... - 409 -1.3 输入数据......................................................................................................... - 410 -1.4 旋转的应用..................................................................................................... - 412 -1.5 测算水平方向................................................................................................. - 416 -第三节转换波速度比(Vp/Vs)计算 ..................................................................... - 417 -1.0 技术讨论......................................................................................................... - 418 -1.1 引言................................................................................................................. - 418 -1.2 输入速度和Vp/Vs文件 ................................................................................ - 418 -1.3 输出速度和Vp/Vs文件 ................................................................................ - 420 -1.4 有效Vp/Vs比值计算 .................................................................................... - 420 -1.5 S波速度计算(Vs) .......................................................................................... - 421 -1.6 平均Vp/Vs比值计算 .................................................................................... - 424 -第四节共转换点计算(CCP_BIN) ............................................................................. - 424 -1.0 技术简介......................................................................................................... - 425 -1.1 基础原理......................................................................................................... - 425 -1.2 更新道头字..................................................................................................... - 427 -1.3 输入速度和Vp/Vs比率文件 ........................................................................ - 427 -1.4 共转换点的计算方法..................................................................................... - 428 -1.5 时窗................................................................................................................. - 430 -1.6 操作指导......................................................................................................... - 431 -1.7 有关提高运行效率的指导............................................................................. - 433 - 第九章模型建立.................................................................................................................. - 435 - 第一节地震岩性模型建立.......................................................................................... - 435 -1.0 技术讨论......................................................................................................... - 435 -SLIM处理 ............................................................................................................... - 435 -1.2 概述................................................................................................................. - 436 -1.3 SLIM模型研究 .............................................................................................. - 437 -1.4 输入层的细分................................................................................................. - 441 -第二节地震岩性模拟属性分析.............................................................................. - 442 -1. 0 技术讨论........................................................................................................ - 442 -1.1 地震模拟模型处理......................................................................................... - 442 -1.2 概要............................................................................................................... - 442 -1.3 地震记录输入................................................................................................. - 443 -1.4 合成地震记录剖面图..................................................................................... - 443 -1.5 地球物理属性................................................................................................. - 444 -1.6 测井记录数据................................................................................................. - 445 -1.7 显示................................................................................................................. - 445 -第三节地震正演模拟模型生成................................................................................ - 445 -1.0 技术讨论......................................................................................................... - 445 -1.1 地震正演模拟模型处理................................................................................. - 446 -1.2 概要................................................................................................................. - 446 -1.3 SLIM模型讨论 .............................................................................................. - 446 -1.4 输入层的细分................................................................................................. - 450 -1.5 井记录............................................................................................................. - 451 -1.6 密度是速度的函数......................................................................................... - 451 - 第四节地震岩性模型优化.......................................................................................... - 453 - 技术讨论.................................................................................................................. - 453 -1.1 地震岩性模拟过程......................................................................................... - 453 -1.2 概要................................................................................................................. - 453 -1.3 问题的公式化................................................................................................. - 453 -1.4 计算方法......................................................................................................... - 455 -1.5 影响区域......................................................................................................... - 462 - 第五节地震岩性模拟控制点定义.............................................................................. - 464 -1.0 技术讨论......................................................................................................... - 464 -1.1 概要................................................................................................................. - 464 -1.2 二维控制点组................................................................................................. - 465 -1.3 三维控制点组................................................................................................. - 467 -前言自西方地球物理公司Omega处理系统引进以来,通过我院处理人员的不断开发,目前已成为西北分院的主力处理系统。
基于群签名的安全电子拍卖方案
名性 ; 阈下通道实现确认 中标者 的“ 通过 打开” 过程。分析表 明方案在相 同安全性的要 求下, 签名 的公钥长度是独立的 , 且签
名长度较短 , 适合于分布式大规模的网上拍卖 , 实验证明是一个安全有效 的电子拍卖方案。 关键 词: 电子拍卖 ; 群签名 ; 双线性映射 ; 矢量空间秘密共享 ; 阈下通 道
ABS TRACT: h a e t d e h r u in t r a e n b l e r p i n ,a d a n w s c r lcr n c a c in T e p p rsu i st e g o p sg au e b d o i n a ar g n e e u e ee t i u t s i i o o s h me i d sg e a e n t e g o p sg au e c e s e i d b d o h r u i tr .T e s h me i a e n b l e rp i n m e tr s a e s c e n s n h c e s b s d o i n a ar g wi v co p c e r t i i s a i g a d s bi n l h n e .I u e e trs a es ce h r gme h im n u et e a o y t f eb d e , h rn n u l mi a a n 1 t s s v co p c e r t a i c a s t e s r h n mi o id r c s n n o n y t h n h o e ”p o e st o f m i d ri r a i d b u l n h n e .An y e h w t a n e e s me s c — a d t e” p n r c s c n i b d e e z ys b i a c a n 1 o r s l e mil l a s ss o h t d rt a e u u h r y c n i o s h e gh o u l e n t e s h me i i d p n e t n e ln t f h i a u e i mu h s o tr i o d t n ,t e ln t fp b i k y i c e s n e e d n d t gh o e sg t r s t i c h a h e t n c h r e
基于模型设计—自定义目标系统配置指南
rtwgensettings.SelectCallback = ['htgt_callback_handler(hDlg, hSrc)'];
表示当中 htgt.tlc 文件时所对应执行的回调函数,即当选择 htgt 目标系统的时候 matlab 将自定执行 htgt_callback_handler 函数中的程序,该程序主要是对一些目标系统 的常用默认设置项进行设置,后文将详述。
4
基于模型设计—自定义目标系统配置指南
图 1-3 c166、mpc555 目标系统组成文件
2、自定义目标系统创建过程及详细解释
以上内容纯属扯淡,下面开始进入正题。 这部分内容以 Embedded_Targets_Development_Guide.zip 中 mathworks 工程师的 ppt 讲稿为基础,讲述自定义目标系统创建过程。 (其实就是把他的内容翻译下,再加上详细的注释和自己的心得,各位看官表说我 抄袭,因为我本来就没说是原创~~~~) /support/solutions/en/data/1-BHU00D/index.html?product=R T
系统目标文件是用于控制整个目标系统的代码生成过程,打开 htgt.tlc 和 c166.tlc 对比,会发现二者非常多的相似处,因为他们是用于设置一些最最基本的内容,下面开 始介绍 htgt.tlc 文件的具体含义。
htgt.tlc——见附近 c166.tlc——见 matlabroot \toolbox\rtw\targets\c166\c166 要想在目标选择窗口中看到自定义的目标系统还需要把系统目标文件(tlc 文件)所 在的目录添加到 matlab path 中。 如:addpath(‘C:\Users\Godman\Desktop\Matlab 底层驱动 \Embedded_Targets_Development_Guide\htgt’)
一种新型分布式浮标电子对抗仿真方法
布式 浮标 群 的作战 效能 。
关键 词 : 浮标 ; 分布 式对 抗 ; 仿真; 对抗 效能评 估
DOI : 1 0. 3 9 6 9 / . i s s n. 1 6 7 4—2 2 3 0. 2 01 4. O1. 01 5
M K 3 6 S R B O C发射架发射, 系统反应时间 1 5 秒, 持 续对抗 1 小时 , 最小有效辐射功率 l k W。目前, 许 多辐射源采取 旁瓣消 隐 、 捷 变频和增 大发射 功率等
技术, 单纯 的速 度 或距 离欺 骗 对 抗 基本 上 不 受 影 响, 但 噪声对抗 还 是对其 有 一定 影 响 , 当对 抗 功率
T h e w o r k l f o a t , ig f h t i n g s t y l e o f b u o y s y s t e m a r e a n a l y z e d, t h e e f f e c t i v e n e s s u n o n me n t o f d i s t r i b u t e d b u o y s i s d i s c u s s e d a s w e l 1 .
1 引 言
分 布式 对抗 作 为 新 型 的 电子 对 抗 手 段 , 在 电 子 战 的各个 领 域 得 到越 来 越 广 泛 的应 用 J 。分
军事 最 发 达 的 美 国 已 拥 有 了 类 似 设 备 J , 如 L U R E S舰 外 有 源 诱 饵 , 重 2 4 k g , 工 作 时 在 离 舰 1 5 0 m到 2 5 0 m 的距 离 上 投 放 一 个 浮 动 的 辐 射 源 对抗 有效 载荷 , 对抗频率 H- J ( 7 . 5—1 6 G H z ) , 采用
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
•
修改内存中的字节码
Agent and Instrumention
Agent and Instrumention
ANT构建工具
0.
hook ProcessBuilder.start添加javaagent参数
1.
2.
hook Main.processClass修改参数
应用bytecode植入监控代码
异常流量报警熔断 网络诊断 HttpDNS 私用通道数据上报 WebCache …
NAPM
THANK YOU
页面加载
内置网络库外置化
org.apache.http.HttpRequest -> ease.apache.http.HttpRequest
• • • •
Time To First Byte Connect time/Read Time DNS ….
其他在做的
• • • • • •
• 源码的限制
封闭的第三方服务
目标
• 无侵入,接入成本小
• 摆脱源码的限制
• 细粒度的监控
APM流程
运行期Hook
• 动态埋点 • 系统API的hook • 虚拟机版本兼容
编译期Hook
编译期Hook
APK编译
编译期Hook
• 预先埋点
• hook业务代码 • 兼容性佳
• 运行期轻量
构建工具
• Ant • Gradle
构建工具之Ant
mand.dexer.Main
hook Main.processClass?
Java Agent
•
Agent是class加载之前的拦截器
静态Agent:-javaagent:/path/agent.jar
-
动态Agent::VirtualMachine.loadAgent
APM Tranform先于系统Transform执行
代码混淆 代码精简 Instant Run
•
兼容Gradle 1.5,2.0,2.1
我们的工作
我们的工作
界面卡顿
•
界面启动
•
• • •
File
SQLite 内存 自定义采集
网络监控
•
HTTP
-
状态码
流量
-
请求响应时间
Header
•
WebView
构建工具之Gradle
特点
•
任务依赖
•
•
Gradle守护进程
Transform API
Transform API
• •
Starting with 1.5.0-beta1 The dex class is gone. You cannot access it anymore through the variant API
网易APM hook方案探索
网易 郑文
自我介绍
2013~至今 网易杭研院-前端技术部 2010~2013 阿里云OS-虚拟机组
目录
• 背景&选型 • Ant构建的hook方案 • Gradle构建的hook方案 • 我们的工作
APM流程
埋点技术的限制
• 接入成本
• 产品基础框架选型不一 • 各产品重复的功能埋点
Gradle < 1.5
动态挂载Agent
Gradle>1.5
Transform is not final
问题•Biblioteka MultiDex:-
NoClassDefFoundError maindexlist.txt
• •
dx in-process 多插件冲突
Support Transform API
•