激光焊缝跟踪系统介绍
激光视觉引导机器臂焊缝跟踪系统应用分析
激光视觉引导机器臂焊缝跟踪系统应用分析摘要:在实现焊接自动化的过程中,焊缝自动跟踪技术是十分关键的一点。
本文以弧焊机器人系统为例,在其传统的模式上,设计了一种由激光视觉所引导的机器臂焊缝跟踪系统。
本文在了解激光焊缝跟踪系统结构的基础上,进一步分析了激光焊缝对于图像的处理以及激光焊缝跟踪控制算法,并最终从对实验结果的分析过程中证明了激光视觉焊缝跟踪系统具有十分广阔的应用前景。
关键词:激光视觉;机器臂;焊缝跟踪系统;应用1.引言近几年,我国的金属制造业发展十分迅速。
在加工金属的过程中,应用最为普遍的加工方法是焊接技术,随着金属制造业的大幅度增加,实现自动化的金属加工具有十分重要的意义。
焊缝跟踪技术具有十分显著的作用,主要包括:一是可以对焊缝的位置信息进行实时的传送;二是让焊炬的运动控制这一模块变成一种自适应的闭环焊接系统,正是由于其所具有的上述优点,所以国内外相关企业以及研究机构都对这一技术进行了连续的研究,并在研究的过程中不断开发新的传感器以及焊缝跟踪技术。
现阶段视觉传感技术在检测图像以及控制运动等方面依然是使用的计算机平台,因此在控制软件开发的过程中存在很大的难度。
为解决这一问题,有研究者提出对于图片的处理通过可编程控制器 FPGA 或者是单片机平台进行,但是经过实验发现这两种方法都存在低速以及低精度的弊端,此外,对于这些跟踪系统来说,其对检测到的跟踪偏移量信息的通信过程是依靠一些比较繁琐的通信协议完成的,因此很难方便的连接到行业内部的主流焊接设备系统,也就是说,这些方法在实际应用中存在着一定的限制。
对于激光视觉所引导的传感跟踪技术来说,其特点主要包括以下几点:第一点是该技术包含大量的信息;第二点该技术其可以实现在垂直以及水平双维度上的跟踪;第三点是该技术具有比较高的灵敏度与精确度;第四点是因为该技术不接触被焊工件因而其适合任何一种破口的形状,适用性比较好。
正是因为激光视觉所引导的传感跟踪技术解决了传统的电弧传感方法以及机械传感方法的弊端,因为其在现实生活中的应用前景是十分广阔的。
焊缝跟踪

激光视觉焊缝
跟踪系统
敏越科技--机器人智能应用专家,专注于激光视觉系统与工业机器人离线编程软
件产品
标准工业机器人焊接具有高效、灵活的特点,但它只能按照预先教编写的程序沿固定路径运动。
在大规模实际生产中,由于工件民族教育误差、焊接过程热变形、工装不稳定等因素,会导致焊缝轨迹、焊缝特征与实际焊接参数不吻合,从而降低焊接质量甚至导致焊接失败。
敏越科技研发的三维激光视觉焊缝跟踪系统SmartEye系列,能实时检测焊缝位置和焊缝特征,控制引导机器人运动,对事先编好的和路径进行实时误差补偿,降低补烛率。
同时可根据焊缝特征对焊接过程参数进行修正,从而提高工业机器人焊接质量。
传感器可消除定位误差以及由热变形带来的不良影响,降低了焊接
过程中的夹具工装成本,提高了焊接工作站的柔性化水平。
已经广泛应用在汽车制造、船舶、高铁、三轮车、罐体焊接等工业机器焊接领域。
激光视觉传感器
SmartEye系列激光视觉传感器采用了高速CMOS图像芯片+FPGA核心芯片设计方案。
充分展现了高速壮行计算,强稳定性等优势,保证了传感器具有200帧每秒的采集和处理速度,使传感器可以适用于快速焊接领域以及高速扫描测量领域。
英国META激光焊缝系列产品介绍

英国META 公司激光焊缝跟踪系列产品介绍一、 激光焊缝跟踪技术的基本原理1.1 三角测量原理激光焊缝跟踪技术基于三角测量原理,如图2所示。
三角测量是一种提取几何信息的方法,有很多应用领域。
焊接激光传感器中通常使用一个半导体激光光源结合图像采集器件,来生成焊接接头的一系列三维截面图像。
三角测量法最大的优点是其仅仅提供了接头的几何信息,亦即物体的真实三维截面信息。
在理论上不受工件的表面状态影响,如表面光照变化或者表面上标记等。
但实际上物体的表面反射会对图像信号有一定的影响,需要一些特殊的技术来克服反射噪声的影响。
三角测量法的另一个优点是易于从设计上克服环境光照的影响,这在明弧环境下尤为重要。
强烈的电弧光会对普通的机器视觉系统产生严重的干扰。
图2 示意了用点状激光测量距工件表面距离的原理。
若要测量整个焊接接头的轮廓,需要沿着接头横向测量一系列连续的距离信息,从而形成三维截面轮廓。
这可以通过以下两种方式来实现:(1) 采用激光条纹投影到接头上,并用二维面阵CCD 获取激光条纹的图像。
我们称其为条纹式传感器。
(2) 沿着接头横向做一维点状激光扫描。
我们称其为扫描式传感器。
n e a rs u r f a c e f a rs u r f a c e i m a g ep o s i t i o n i s a f u n c t i o n l a s e r s e n s o r l a s e r d i s t a n c e a c t u a ld i s t a n ce of c a m e ra i m a g e p o s i t i o n图2 三角测量原理 二、产品系列:2.1 条纹式传感器顾名思义,其原理是采用激光条纹垂直投射到焊接接头上。
条纹的形状因受焊接接头形状影响而产生变形。
变形了的条纹图像被与激光器呈一定角度的二维CCD 或者CMOS 摄像机采集到计算机中进行信号处理。
激光焊缝跟踪在厚壁压力容器焊接中的应用_林三宝
生产应用激光焊缝跟踪在厚壁压力容器焊接中的应用哈尔滨工业大学现代焊接生产技术国家重点实验室(150080)林三宝杨春利英国Meta视觉系统有限公司R J Beattie摘要激光焊缝跟踪是自动化焊接设备中比较成熟的焊枪导引系统。
它开发于20世纪80年代初,并首先用于焊接机器人应用中。
随着这项技术的日渐成熟,已被用在许多焊接自动化系统中。
概述了激光焊缝跟踪系统在厚壁焊接,如压力容器、造船和管道生产等行业中的应用。
关键词:激光焊缝跟踪焊接自动化多道焊APPLIC ATIONS OF LAS ER SEAM TRACKING TO WELDINGTHIC K WALL VESSELSState Key Lab of Advanced Welding Production Technology,H IT Lin Sanbao,Yang C hunli M eta Vision Systems Ltd,UK R J BeattieAbstract Laser seam tracking is a w ell-prov en and established method of weld guidance for automated w elding sys-t ems.It w as first developed in the early1980.s for r obotic welding applications.As the technolo gy matur ed,it was ap-plied to other types of w elding automation.T his paper presents an overview o f applications.Key words:laser seam tracking,welding automation,multipass welding0前言目前在多道埋弧焊的激光焊缝跟踪中主要有两种方法,一种是相对简单和低成本系统,但需要操作者手工选择每个焊道焊接时焊枪的位置;另一种是相对高级(也比较昂贵)的系统,系统自身能够判定每道焊接时焊枪的位置,从而控制熔敷过程[1]。
基于激光视觉的焊缝跟踪系统方案
基于激光视觉的焊缝跟踪系统一、焊缝自动跟踪系统构成基于激光视觉传感,具有主动性、非接触、能获取物体的三维信息、灵敏度精度高、抗电磁场干扰能力强等优点,被认为是焊缝检测的主要发展方向。
线激光法是一种直接获取深度图像的方法,它可以获取焊缝的二维半信息。
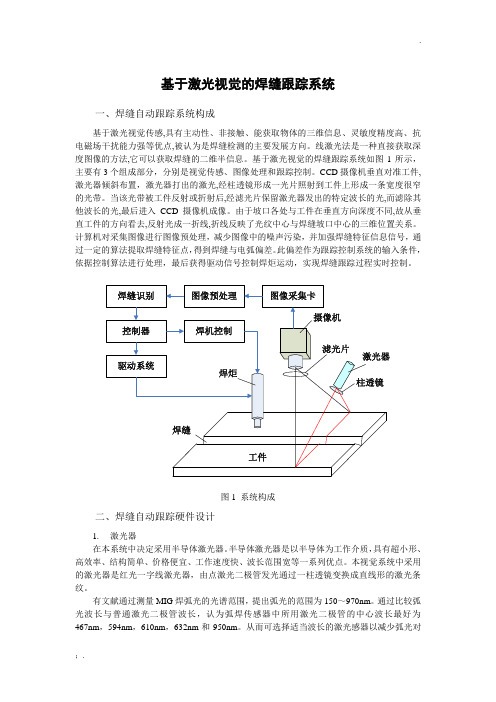
基于激光视觉的焊缝跟踪系统如图1所示,主要有3个组成部分,分别是视觉传感、图像处理和跟踪控制。
CCD摄像机垂直对准工件,激光器倾斜布置,激光器打出的激光,经柱透镜形成一光片照射到工件上形成一条宽度很窄的光带。
当该光带被工件反射或折射后,经滤光片保留激光器发出的特定波长的光,而滤除其他波长的光,最后进入CCD摄像机成像。
由于坡口各处与工件在垂直方向深度不同,故从垂直工件的方向看去,反射光成一折线,折线反映了光纹中心与焊缝坡口中心的三维位置关系。
计算机对采集图像进行图像预处理,减少图像中的噪声污染,并加强焊缝特征信息信号,通过一定的算法提取焊缝特征点,得到焊缝与电弧偏差。
此偏差作为跟踪控制系统的输入条件,依据控制算法进行处理,最后获得驱动信号控制焊炬运动,实现焊缝跟踪过程实时控制。
图1 系统构成二、焊缝自动跟踪硬件设计1.激光器在本系统中决定采用半导体激光器。
半导体激光器是以半导体为工作介质,具有超小形、高效率、结构简单、价格便宜、工作速度快、波长范围宽等一系列优点。
本视觉系统中采用的激光器是红光一字线激光器,由点激光二极管发光通过一柱透镜变换成直线形的激光条纹。
有文献通过测量MIG焊弧光的光谱范围,提出弧光的范围为150~970nm。
通过比较弧光波长与普通激光二极管波长,认为弧焊传感器中所用激光二极管的中心波长最好为467nm,594nm,610nm,632nm和950nm。
从而可选择适当波长的激光感器以减少弧光对激光的干扰。
参考多篇文献,本系统选用弧光干扰最小中心波长650 nm的条形半导体激光器。
2.摄像头CCD和滤光片本系统采用面阵型CCD工业摄像头,主要考虑其性能稳定,工作可靠的特点,要求CCD 尺寸1/3",帧率25fps以上。
英国META激光焊缝系列产品介绍
英国META 公司激光焊缝跟踪系列产品介绍一、 激光焊缝跟踪技术的基本原理1.1 三角测量原理激光焊缝跟踪技术基于三角测量原理,如图2所示。
三角测量是一种提取几何信息的方法,有很多应用领域。
焊接激光传感器中通常使用一个半导体激光光源结合图像采集器件,来生成焊接接头的一系列三维截面图像。
三角测量法最大的优点是其仅仅提供了接头的几何信息,亦即物体的真实三维截面信息。
在理论上不受工件的表面状态影响,如表面光照变化或者表面上标记等。
但实际上物体的表面反射会对图像信号有一定的影响,需要一些特殊的技术来克服反射噪声的影响。
三角测量法的另一个优点是易于从设计上克服环境光照的影响,这在明弧环境下尤为重要。
强烈的电弧光会对普通的机器视觉系统产生严重的干扰。
图2 示意了用点状激光测量距工件表面距离的原理。
若要测量整个焊接接头的轮廓,需要沿着接头横向测量一系列连续的距离信息,从而形成三维截面轮廓。
这可以通过以下两种方式来实现:(1) 采用激光条纹投影到接头上,并用二维面阵CCD 获取激光条纹的图像。
我们称其为条纹式传感器。
(2) 沿着接头横向做一维点状激光扫描。
我们称其为扫描式传感器。
n e a rs u r f a c e f a rs u r f a c e i m a g ep o s i t i o n i s a f u n c t i o n l a s e r s e n s o r l a s e r d i s t a n c e a c t u a ld i s t a n ce of c a m e ra i m a g e p o s i t i o n图2 三角测量原理 二、产品系列:2.1 条纹式传感器顾名思义,其原理是采用激光条纹垂直投射到焊接接头上。
条纹的形状因受焊接接头形状影响而产生变形。
变形了的条纹图像被与激光器呈一定角度的二维CCD 或者CMOS 摄像机采集到计算机中进行信号处理。
激光焊缝跟踪系统机器人用技术手册讲解

本文由【中文word文档库】搜集整理。
中文word文档库免费提供海量教学资料、行业资料、范文模板、应用文书、考试学习和社会经济等word文档Meta Vision Systems机器人用激光焊缝跟踪系统技术手册原作者:Jonathan Moore 翻译:Dr. Lin Sanbao (林三宝博士)前言尽管我们在编写这个手册时已经尽了最大努力,但是我们不接受任何由通过使用或者错误使用本手册中的信息,或者可能包含在本手册中的错误,而引发的责任和义务。
本手册所提供的信息只是用于培训的目的。
英文版权所有 © Meta Vision Systems 2000。
中文版版权所有© 中国哈尔滨AWPT-RDC联合实验室所有权力保留,未经允许,不得以任何形式复制本手册或本手册中的任何部分。
联系方式:Meta Vision Systems Ltd.Oakfield HouseOakfield Industrial EstateEynshamOxfordshireOX8 1THUNITED KINGDOMTel: +44 (0) 1865 887900Fax: +44 (0) 1865 887901Email: support@中国地区:地址:珠海市九洲大道兰埔白石路105号二楼西邮编:519000电话:0756 --- 8509695、8508516、6680610、6602419、6626464传真:0756 --- 8500745联系人:魏占静电邮:jbw@ wzj0756@网址:目录1.概述 (4)1.1传感头 (4)1.2控制系统 (4)1.3应用 (4)1.4典型应用 (5)1.5焊缝类型 (5)2.传感器 (10)2.1激光的安全性 (10)2.2规格 (10)2.3MT 产品系列的规格 (12)2.4传感器的物理规格 (13)2.5焊缝的特征尺寸 (13)3.控制系统 (15)3.1MTF – Finder(MTF 定位控制系统) (15)3.2MTR (16)3.3MTR Integrated(集成型MTR系统) (17)3.4MTX-HS (17)4.软件的主要特征 (19)4.1焊缝定义 (19)4.2间隙测量 (19)4.3真实路径(True Path) (19)4.4搜索 (19)4.5体积&高度错边测量 (20)4.6交替式激光器 (20)4.7示教跟踪(Teach Track) (21)5.配置和可选项 (22)5.1应用概述 (22)5.2硬件和软件可选项 (23)1. 概述Laser Pilot产品系列被设计用于为机器人应用提供导引技术的解决方案。
激光焊缝跟踪系统手册
同舟兴业科技有限公司研发生产的激光焊缝跟踪系统结合了线结构激光和图像处理技术,实现了 对焊接位置的三维测量,能够提供焊接轨迹给焊接机器人或焊接专机,拥有强大的抗干扰能力,能够 适应焊接时产生的高温、强光、飞溅以及强电磁干扰,具有广泛的适应能力。激光焊缝跟踪系统软件 功能强大,可以适用于大部分焊缝类型,超高的采样频率可适用高速焊接的场合。
适用的焊接类型
氩弧焊样的测量工具,可以适用于各种焊缝类型。
适用的焊缝类型
对接焊缝
搭接焊缝
角接焊缝
边缘焊缝
外侧角接
v坡口焊缝
04
产品参数
测量范围
(测量范围示意图)
型号
最佳架设距离
近
Z轴(高度) 远
测量范围
近
X轴(宽度)
远
类型
波长 光源
激光分类
输出
Z轴(高度)
近
测量精度
鉴于上述问题,同舟科技开发了激光焊缝跟踪系统,由图像传感器采集图像对焊缝进行实时跟 踪和采集,再由控制器发出指令给焊接终端,实现焊缝的实时监测和校正。只需将本系统连接到焊 接专机中,就能实现无人化焊缝检测,能够大大减少人工成本,提高产品质量和工作效率 。 随着客户对焊接速度和质量]要求的不断提高以及人工成本的持续上涨,近些年自动化焊接设备的需 求越来越多,焊接专机、焊接机器人系统等自动化系统的销售量呈现逐年上升的态势。
系统示意图
激光焊缝跟踪系统由激光2D传感器和控制器构成。 激光2D传感器采集到焊缝的信息后,由控制器进行计算,计算出焊缝位置后将数据传输给焊 接系统控制器。常见的焊接系统控制器有PLC,工控机以及机器人控制器,焊接系统控制器收到 焊缝根踪系统传输的焊缝位置后,调节焊枪位置,实现工件的智能焊接。