选择阶跃扰动作用下系统的稳态误差
系统的稳态误差为
r (t ) t
e ss
1
r (t ) t
e ss
1
2
Kp
0型 I型 II型
Kv
0
Ka
0 0
ess
1
1
2
1 K
K
p
KvKp1来自 1Ka
K
0 0
Kv
K
0
Ka
三、系统稳定误差的计算
综述,系统的稳态误差与输入信号形式有 关,对于一个结构确定的系统,如果给定 输入形式不同,其稳态误差就不同;同时 稳态误差与系统结构也密切相关,如果给 定信号一定,不同结构的系统稳态误差也 不同。 按静态误差系数法计算稳态误差的方法, 是基于拉氏变换的终值定理,只能使用阶 跃、斜坡及加速度或他们的组合,如果输 入是其他任意时间函数,以上结论则不能 成立。
ess
特征方程为D( s) 1 Gk ( s) an s n an 1s n 1 ... a2 s 2 a1s a0 0
n n 1 2 a s a s ... a s 等式两边同除以 n n 1 2 a1s a0 1 Gk ( s) 0 1 0 则 n n 1 2 an s an 1s ... a2 s 得 a1s a0 Gk ( s) 该系统为Ⅱ型系统 an s n an 1s n 1 ... a2 s 2 开环增益为 a0 a1s a0 K 2 a2 n2 n 3 s (an s an 1s ... a2 )
ess
1、先求取系统的开环传递函数 Gk ( s)
Gk (s)
C(s)
设开环传递函数为 Gk ( s) M ( s) 即,开环传递函数 N ( s) 与闭环传递函数 M (s) 有相同的零点 Gk ( s ) M (s) N (s) GB ( s ) a s a0 1 Gk ( s ) 1 M ( s ) N ( s ) M ( s ) 得 Gk ( s ) 1 ? N (s)
自动控制原理--控制系统的稳态误差
二、给定作用下的稳态误差
设系统开环传递函数为:
其中K为开环增益,v为系统中含有的积分环节数 对应于v=0,1,2的系统分别称为0型,Ⅰ型和Ⅱ型系统。
稳态误差的定义
• 误差定义为输入量与反馈量的差值
• 稳态误差为误差的稳态值 • 如果需要可以将误差转换成输出量的量纲
• 稳态误差不仅与其传递函数有关,而且与输入 信号的形式和大小有关。其终值为:
稳态误差计算
误差的定义:
E(s) R(s) B(s)
lim ess ()
( L1[ E ( s )])
(1)系统是稳定的; (2)所求信号的终值要存在。
例27 已知系统如图3-36所示。当输入信号 rt ,1干t扰信 号 n时t,求1t系 统的总的稳态误差。
Ns
Rs
Es
K1
K2 s
Y s
Bs
图3-36 例3-15系统结构图
解:⑴对于本例,只要参数 K1, K均2大于零,则系统一定是稳 定的。
⑵在r t 信1t号 作用下(此时令 n)t 0
s0
s0
1 s K1K2
K2 s K1K2
1 s
1 K1
由以上的分析和例题看出,稳态误差不仅与系统本身
的结构和参数有关,而且与外作用有关。利用拉氏变换
的终值定理求得的稳态误差值或者是零,或者是常数,
或者是无穷大,反映不出它随时间的变化过程。另外,
对于有些输入信号,例如正弦函数,是不能应用终值定
最后由终值定理求得稳态误差 ess
ess
扰动稳态误差静态误差系数法
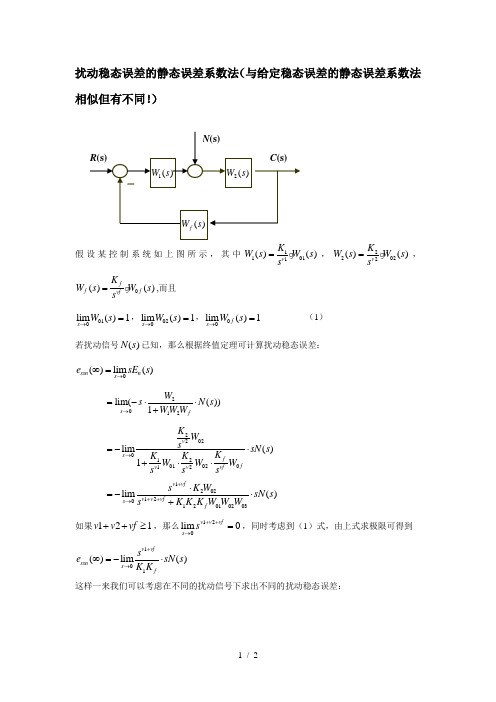
扰动稳态误差的静态误差系数法(与给定稳态误差的静态误差系数法相似但有不同!)假设某控制系统如上图所示,其中11011()()v K W s W s s =g ,22022()()v K W s W s s =g ,0()()ff f vf K W s W s s =g ,而且010lim ()1s W s →=,020lim ()1s W s →=,00lim ()1f s W s →= (1) 若扰动信号()N s 已知,那么根据终值定理可计算扰动稳态误差:()lim ()ssn n s e sE s →∞= 2012lim(())1s fW s N s WW W →=-⋅⋅+ 20220120102012lim ()1v s f f v v vf K W s sN s K K K W W W s s s→=-⋅+⋅⋅ 120212012010203lim ()v vf v v vf s f s K W sN s s K K K W W W +++→⋅=-⋅+ 如果121v v vf ++≥,那么120lim 0v v vfs s ++→=,同时考虑到(1)式,由上式求极限可得到101()lim ()v vfssn s fs e sN s K K +→∞=-⋅ 这样一来我们可以考虑在不同的扰动信号下求出不同的扰动稳态误差:从上面这个表格我们可看出用静态误差系数法求扰动稳态误差时与求给定稳态误差时很相似,但是又有很大不同:用静态误差系数法求扰动稳态误差判定系统的型号和开环放大系数时,只需考虑1()W s 和()f W s ,即只考虑原系统扰动作用点之前的前向通道传函以及反馈通道传函,至于系统扰动作用点之后的前向通道传函2()W s 与扰动稳态误差无关(而求给定稳态误差时所有的环节都要考虑)。
因此要减小扰动稳态误差的话只需改变扰动作用点之前的前向通道传函以及反馈通道传函,改变扰动作用点之后的前向通道传函是无效的。
系统的稳态误差分析
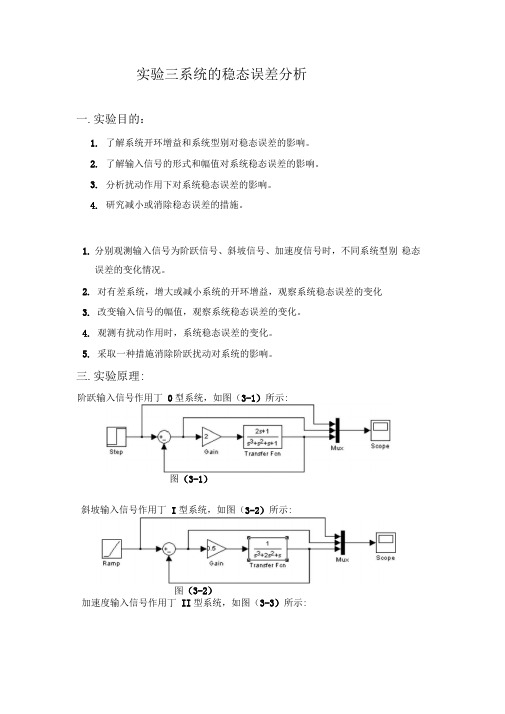
实验三系统的稳态误差分析一.实验目的:1.了解系统开环增益和系统型别对稳态误差的影响。
2.了解输入信号的形式和幅值对系统稳态误差的影响。
3.分析扰动作用下对系统稳态误差的影响。
4.研究减小或消除稳态误差的措施。
1.分别观测输入信号为阶跃信号、斜坡信号、加速度信号时,不同系统型别稳态误差的变化情况。
2.对有差系统,增大或减小系统的开环增益,观察系统稳态误差的变化3.改变输入信号的幅值,观察系统稳态误差的变化。
4.观测有扰动作用时,系统稳态误差的变化。
5.采取一种措施消除阶跃扰动对系统的影响。
三.实验原理:阶跃输入信号作用丁0型系统,如图(3-1)所示:图(3-1)斜坡输入信号作用丁I型系统,如图(3-2)所示:图(3-2)加速度输入信号作用丁II型系统,如图(3-3)所示:图(3-3)图(3-4)四.实验步骤:利用MATLAB中的Simulink仿真软件。
1.参照实验一的步骤,建立如图(3-1)所示的实验方块图进行仿真;2.单击工具栏中的卜图标,开始仿真,观测在阶跃输入信号作用下,型系统的输出曲线和误差曲线,记录此时的稳态误差值,并与理论计算值相比较;3.有误差时,调整“ Gain”模块的增益,观察稳态误差的变化,分析系统开环增益对稳态性能的影响;4.有误差时,调整输入信号的幅值,观察稳态误差的变化,分析输入信号的大小对稳态误差的影响;5.将对象分别更换为I型和皿型系统,观察在阶跃输入信号作用下,型和皿型系统的输出曲线和误差曲线,记录此时的稳态误差值。
6.更换输入信号的形式为斜坡信号,参考图(3-2)所示的实验方块图,重复步骤2~4,分别观测0型、I型和II型系统的稳态误差。
7.再将输入信号的形式更换为加速度信号,参考图(3-3)所示的实验方块图,重复步骤2~4,分别观测0型、I型和II型系统的稳态误差。
8.在扰动信号作用下,仿真实验方块图如图(3-4)所示,输入阶跃扰动信号,观测系统的输出曲线和误差曲线,记录此时的稳态误差值,并与计算的理论值相比较;9.调整“Gain”模块的增益,观察稳态误差有无变化;,10.再调整“Gainl”模块的增益,观察稳态误差有无变化;11.在扰动作用点之前增加积分环节消除阶跃扰动对系统输出的影响。
稳态误差(2)

R(s)
E(s)
- G1 K1
N (s)
+
G2
K2 s
C(s)
解:
essn
lim
s0
s
NE
1 s
lim s0
K2 s K1K2
1 K1
根据前面的分析知,稳态误差与G1中的增益和积分环节的个数有关。此 时因G1无积分环节,所以 essn 1K1
ess
essr
essn
1 K1
可用静态误差系数法
-
H (s) (b)
例 系统如图所示,已知 输入
求系统的稳态误差。
r(t) At 2 2 n(t) At
解
.
G(s) K1K 2 K 3 (Ts 1) s1 s2
K v
K 2
1
K
2
K
3
e(s)
E(s) R(s)
s1 s2
s1 s2 K1K 2 K 3 (Ts
1)
求该系统输入作用 下的误差,建议用
系统扰动作用下的稳态误差
分析目的:干扰信号对系统的影响,讨论干扰引起的稳态误差与 系统结构参数的关系,可以为合理设计系统结构,确定参数,提 高系统抗干扰能力提供参考。
解法:与求输入信号的静态误差方法相同,不同的是要求扰 动的误差传递函数,不能用静态误差系数法。
N(s)
R(s) E(s) G1(s)
+ G2 (s) C(s)
积分环节。
essn
lim s0
sN (s) G1
K 1 K
此时在阶跃扰动输入时是有差系统,设 G1(s) K1G10(s),G10(0) 1
essn
K K1 (1
控制工程基础- 第5章 控制系统的稳定误差

控制系统的稳态误差
静态误差系数法—— r(t) 作用时 ess 的计算规律
G(s)
G (s)H(s) 1
K (1s 1) (ms 1)
sv (T1s 1) (T nv s 1)
K sv
G
0(s
)
K:开环增益 v:类别(类型)
G (s) (1s 1) (m s 1)
0
(T1s 1) (T nv s 1)
lim
s0
G 0(
s
)
1
R(s)
e(s)
E(s) R(s)
1 1 G1(s)H (s)
1
1
K
v
G0(s)
s
E(s)
G1 ( s )
C(s)
H(s)
ess
lim
s0
se (s)R(s)
lim
s0
s
R(s)
1
1
K sv
G0(s)
稳态误差 ess 与输入r(t)的形式、系统的结构参数(K,v)有关。
Kn
en (s)
E(s) N(s)
1
Tns 1 K
(Tn s
Kn s(Ts 1)
1)s(Ts 1)
K
s(Ts 1)
essn
lim
s0
sen (s)N (s)
lim
s0
s
(Tn s
Kn s(Ts 1) 1) s(Ts 1)
K
1 s2
Kn K
e ess
essr
essn
1 Kn K
控制系统的稳态误差
ess
lim
s0
系统的稳态误差

06-7-20
控制工程基础
6
6.2 输入引起的稳态误差
一 误差传递函数与稳态误差
Xi (s)
E(s) G(s)
X o (s)
1 单位反馈系统的误差传递函数 与稳态误差
由图6-2可得单位反馈系统 误差传递函数及误差信号
E(s) 1
e (s)
X i (s)
1 G(s)
E
(s)
e
(s)
X
i
(s)
1
1 G(s)
0
ess (t):误差信号的稳态分量,即为控制系统的稳态误差。
ess
ess ()
lim
t
ess
(t
)
如果有理函数 sE(s) 除在原点处有唯一的极点外,在S右半
平面及虚轴上解析,即 sE(s)的极点均位于S平面左半平面
(包括坐标原点),则可根据拉氏变换的终值定理,方便
地求出系统的稳态误差:
ess
lim
s0
lim
s0
s
1
1 G(s)H(s)
Xi (s)
(6-9)
1
1
ess
lim s
s0
H (s)
1 G(s)H(s)
Xi (s)
(6-10)
06-7-20
控制工程基础
9
例1 某反馈系统如图所示,当 xi (t) 1(t) 时,求系统的稳态误差。
Xi (s)
E(s) 10
s
X o (s)
10
解:(1)首先判断系统的稳定性 G(s) 10
E(s) 1 G(s) Xi (s) s2 1.6s 4 • s -0.3
-0.4
自动控制原理_王万良(课后答案5

第5章习题5.1 已知系统的单位阶跃响应为t te et c 10602.12.01)(−−−+=,试求:(1) 系统的传递函数;(2) 系统的阻尼比ξ和自然振荡频率n ω。
*答案:(1))10)(60(600)(++=s s s s G(2)43.1=ξ 5.24=n ω5.2 设单位反馈系统的开环传递函数为)1(1)(+=s s s G试求系统的上升时间r t 、超调时间p t 、超调量%p σ和调节时间s t 。
*答案:42.2=r t 625.3=p t%3.16=σ ⎩⎨⎧=∆=∆=2856s t5.3 要求图题5.3所示系统具有性能指标:%20%=p σ,s t p 1=。
试确定系统参数K 和A ,并计算r t ,s t 。
图题5.3*答案:5.60=K 135.0=A5.4图题5.4所示控制系统,为使闭环极点为s j1=−±,试确定K 和α的值,并确定这时系统阶跃响应的超调量。
*答案: 2=K1=α 35.0=r t ⎩⎨=∆=5654.0s t5.5 设典型二阶线性定常系统的单位阶跃响应曲线如图题5.5所示 (1)求阻尼比ς和自然振荡频率n ω;(2)画出等效的单位反馈系统; (3)写出相应的开环传递函数。
)10(100)(+=S S s G 图题5.5*答案(1)4.0=ζ 4.11=n ω(3)9.12)s(s 129.96)(+=s G5.6图题5.6所示采样控制系统,已知图中线性网络部分的单位阶跃响应为1−−e t,采样周期为T ,求系统在输入单位阶跃信号时的输出响应y nT ()。
零阶保持器线性网络uy T图题5.6*答案:nTenT y −=1)(5.7 试求下列状态方程的解,设初始状态为)0(x 。
x x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡−−−=300020001& 答案:)0()(32x e e e t x t tt⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=−−−5.8 求下列状态方程在单位阶跃输入作用下的响应。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
s 0
单位抛物线输入信号作用下系统的稳态误差 K K a lim s 2Gk ( s) lim 2 s 0 s 0 s 1 ess 不能跟踪斜坡输入信号 Ka 0 1 ess const 有差系统 K a K const 2 K
K
令 Kv lim sGk ( s) 称为系统的静态速度误差系数
s 0
单位斜坡输入信号作用下系统的稳态误差 ess
K v lim sGk ( s) lim 1 s 0 s 0 s 0 ess 不能跟踪斜坡输入信号 Kv 0 1 e const 有差系统 K v K const 1 ss K 无差系统 K 2 e 0
3-3 闭环系统的稳态误差
一、稳态误差的定义 e(t ) r (t ) b(t )
R(s) E(s) G(s)
_
·
C ( s)
ess lim e(t ) 稳态误差:
e(t ) L1[ E (s)]
ess lim sE ( s)
s 0
B( s )
t
H ( s)
图3-11系统结构图
1 ess Ka
3
Ka
ess 0
无差系统
5
结论: 闭环系统的稳态误差只与开环放大系数K和开环传 递函数所含积分环节的个数 有关(输入确定时) 一定的输入信号作用下闭环系统是否有差取决于 定义 为系统的无差度阶数。按照无差度阶数对系统进行分 0 的系统称为(典型)0型系统, 1的系统称为(典 类。 型)Ⅰ型系统, 2的系统称为(典型) Ⅱ 型系统,高于 Ⅱ 型的系统很难稳定,不常见。 对于有差的系统,其稳态误差的大小取决于K,且 与K成反比 1 ess 单位阶跃输入信号作用下系统的稳态误差 1 K p 1 单位斜坡输入信号作用下系统的稳态误差 ess Kv 1 单位抛物线输入信号作用下系统的稳态误差 ess Ka
拉氏变换的终值定理
Gk ( s ) G ( s ) H ( s )
E ( s ) E ( s ) R( s )
E ( s) 1 E ( s) R( s) 1 Gk ( s)
1 R( s ) 1 Gk ( s)
1
二、给定输入作用下系统的误差分析
K 1 Gk ( s) i s n1
m1
m2
1 R( s) s 1 ess 1 K p
K p lim Gk ( s) lim s 0 s 0 s 0 K p K const ess
K
1 1 1 K p 1 K
有差系统 无差系统
1
Kp
ess 0
单位斜坡输入信号作用下系统的稳态误差 1 1 R( s) 2 s 2 s 1 s ess lim s 0 1 Gk ( s ) lim s Gk ( s )误差
1 ess 1 K p
2
2 2 ( s 1 ) ( i k s 2 k k s 1) K i 1 K k 1 Gk ( s ) n G0 ( s ) n 2 s 1 s 2 2 (T j s 1) (Tl s 2 lTl s 1) j 1 l 1
v ss
4
K
1 Kv
E ( s ) E ( s ) R( s )
1 R( s ) 1 Gk ( s)
1 R( s) 3 s
单位抛物线输入信号作用下系统的稳态误差 1 s 3 1 1 s ess lim R( s) 3 s 0 1 Gk ( s ) lim s 2 Gk ( s ) s
s 0
3
K i 1 Gk ( s ) n s 1
2 2 ( s 1 ) ( i k s 2 k k s 1) 2 2 ( T s 1 ) ( T j l s 2 lTl s 1) j 1 l 1 k 1 n2
m1
m2
G0 ( s ) s
2 2 ( s 1 ) ( i k s 2 k k s 1)
m1
m2
(T j s 1) (Tl2 s 2 2 lTl s 1)
j 1 l 1
k 1 n2
K G0 ( s) s
单位阶跃输入信号作用下系统的稳态误差 1 s 1 1 s ess lim R( s) s s 0 1 Gk ( s ) 1 lim Gk ( s ) 令 K p lim Gk ( s) 称为系统的静态位置误差系数
B ess Kv
C ess Ka
B K
0
C K
7
Ⅰ 型
Ⅱ 型
K
0 0
K
求取系统稳态误差的步骤: •1.判断系统的稳定性
•2.开环传递函数写成时间常数形式,确定开环放大
• 系数K和系统的无差度阶数γ
•3.计算静态误差系数Kp、Kv 和Ka •4.根据输入信号的形式,按照相应的稳态误差计算 • 公式计算系统的稳态误差 输入信号为 r (t ) A Bt 1 ct 2时,稳定系统的稳态误差为 2 A B c ess 1 K p Kv Ka
6
表3-1 输入信号作用下的稳态误差
系 误差系数 统 类 型 K K K p v a 0型 K 0 0 0 典型输入信号作用下系统的稳态误差
阶跃输入 斜坡输入 抛物线输入
r (t ) A 1(t )
r (t ) B t
r (t )
1 2 Ct 2
A ess 1 K p A 1 K
8
例3-7 系统的开环传递函数为 Gk ( s)
15(5s 1)
s( s 2 6s 15) 试求系统的静态位置误差系数 K p 、静态速度误差系数 K v 和静态加速度误差系数 K a 。