使用魔术公式的轮胎模型共6页文档
用魔术公式建立轮胎模型
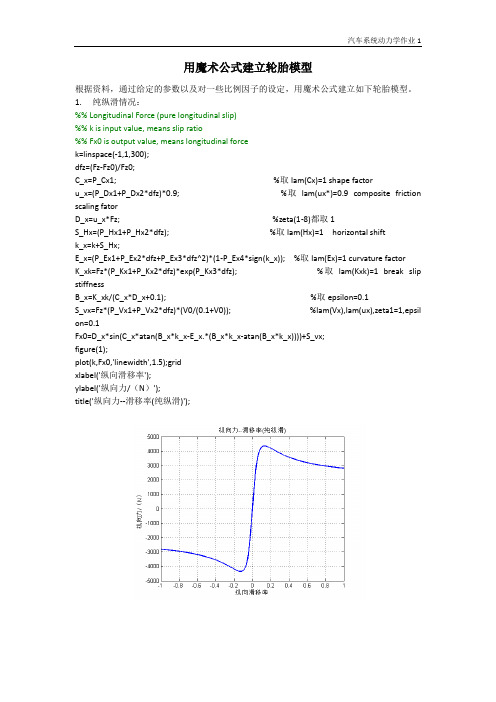
用魔术公式建立轮胎模型根据资料,通过给定的参数以及对一些比例因子的设定,用魔术公式建立如下轮胎模型。
1.纯纵滑情况:%% Longitudinal Force (pure longitudinal slip)%% k is input value, means slip ratio%% Fx0 is output value, means longitudinal forcek=linspace(-1,1,300);dfz=(Fz-Fz0)/Fz0;C_x=P_Cx1; %取lam(Cx)=1 shape factoru_x=(P_Dx1+P_Dx2*dfz)*0.9; %取lam(ux*)=0.9 composite friction scaling fatorD_x=u_x*Fz; %zeta(1-8)都取1S_Hx=(P_Hx1+P_Hx2*dfz); %取lam(Hx)=1 horizontal shiftk_x=k+S_Hx;E_x=(P_Ex1+P_Ex2*dfz+P_Ex3*dfz^2)*(1-P_Ex4*sign(k_x)); %取lam(Ex)=1 curvature factorK_xk=Fz*(P_Kx1+P_Kx2*dfz)*exp(P_Kx3*dfz); %取lam(Kxk)=1 break slip stiffnessB_x=K_xk/(C_x*D_x+0.1); %取epsilon=0.1S_vx=Fz*(P_Vx1+P_Vx2*dfz)*(V0/(0.1+V0)); %lam(Vx),lam(ux),zeta1=1,epsil on=0.1Fx0=D_x*sin(C_x*atan(B_x*k_x-E_x.*(B_x*k_x-atan(B_x*k_x))))+S_vx;figure(1);plot(k,Fx0,'linewidth',1.5);gridxlabel('纵向滑移率');ylabel('纵向力/(N)');title('纵向力--滑移率(纯纵滑)');2.纯侧滑情况:%% Lateral Force and Torque (pure side slip)%% a is input value, means slip angle%% Fy0 is output value, means side force%% Mz0 is output value, means aligning torquea=linspace(-15,15,300); %侧偏角取-15-15 度ta=tan(a*pi/180);sr=sin(r); %r是外倾角,sr 表示r*C_y=P_Cy1; %取lam(Cy)=1u_y=(P_Dy1+P_Dy2*dfz)/(1+P_Dy3*sr^2); %取lam(uy*)=1D_y=u_y*Fz; %zeta(1-8)都取1K_ya=P_Ky1*Fz0*sin(P_Ky4*atan(Fz/((P_Ky2+P_Ky5*sr^2)*Fz0)))/(1+P_Ky3*sr^2); %取lam(Kya)=1 zeta(3)=1B_y=K_ya/(C_y*D_y); %取epsilony=0;K_yr0=Fz*(P_Ky6+P_Ky7*dfz); %取lam(Kyr)=1S_Vyr=Fz*(P_Vy3+P_Vy4*dfz)*sr;%lam(kyr)=1, camber force stiffness 后面的修正系数全部取1S_Hy=(P_Hy1+P_Hy2*dfz)+(K_yr0*sr-S_Vyr)/(K_ya+0.1); %zeta(0,4)都取1 epsilon(k)=0.1 S_Vy=Fz*(P_Vy1+P_Vy2*dfz)+S_Vyr; %lam(Vy,uy)=1,zeta(2)=1ay=ta+S_Hy; %tan(sa)表示横向侧偏角a*E_y=(P_Ey1+P_Ey2*dfz)*(1+P_Ey5*sr^2-(P_Ey3+P_Ey4*sr)*sign(ay)); %lam(ey)=1Fy0=D_y*sin(C_y*atan(B_y*ay-E_y.*(B_y*ay-atan(B_y*ay))))+S_Vy;figure(2);plot(a,Fy0,'linewidth',1.5);gridxlabel('侧偏角');ylabel('侧向力/(N)');title('侧向力-侧偏角(纯侧滑)');C_r=1;C_t=q_Cz1;B_t=(q_Bz1+q_Bz2*dfz+q_Bz3*dfz^2)*(1+q_Bz5*abs(sr)+q_Bz6*sr^2);S_Ht=q_Hz1+q_Hz2*dfz+(q_Hz3+q_Hz4*dfz)*sr;a_t=ta+S_Ht;B_r=(q_Bz9+q_Bz10*B_y*C_y);E_t=(q_Ez1+q_Ez2*dfz+q_Ez3*dfz^2)*(1+(q_Ez4+q_Ez5*sr)*(2/pi)*atan(B_t*C_t*a_t));S_Hf=S_Hy+S_Vy/K_ya;ar=ta+S_Hf;D_t0=Fz*(R0/Fz0)*(q_Dz1+q_Dz2*dfz); %取lambda(t)=1D_t=D_t0*(1+q_Dz3*abs(sr)+q_Dz4*sr^2);t0=D_t*cos(C_t*atan(B_t*a_t-E_t.*(B_t*a_t-atan(B_t*a_t))));D_r=Fz*R0*(q_Dz6+q_Dz7*dfz)+(q_Dz8+q_Dz9*dfz)*sr+(q_Dz10+q_Dz11*dfz)*sr*abs(sr);M_zr0=D_r*cos(C_r*atan(B_r*ar)); M_z0=M_zr0-t0.*Fy0;figure(3);plot(a,M_z0,'linewidth',1.5);grid on;xlabel('侧偏角');ylabel('回正力矩/(N)');title('回正力矩-侧偏角(纯侧滑)')3.组合滑移情况:%% Longitudinal Force (combined slip)%% aS is input value, means slip angle%% Fx is output value, means longitudinal forceS_Hxa=r_Hx1;E_xa=r_Ex1+r_Ex2*dfz;C_xa=r_Cx1;B_xa=(r_Bx1+r_Bx3*sr^2)*cos(atan(r_Bx2*k)); %lam(xa)=1,influence on Fx 矩阵aS=ta+S_Hxa; %矩阵G_xa0=cos(C_xa*atan(B_xa*S_Hxa-E_xa*(B_xa*S_Hxa-atan(B_xa*S_Hxa))));G_xa=cos(C_xa*atan(B_xa.*aS-E_xa*(B_xa.*aS-atan(B_xa.*aS))))./G_xa0;Fx=G_xa.*Fx0;figure(4);plot(a,Fx,'linewidth',1.5);grid on;xlabel('侧偏角');ylabel('纵向力/(N)');title('纵向力-侧偏角(混合滑移)');%% Lateral Force (combined slip)%% kS is input value, means slip ratio%% Fy is output value, means longitudinal forceC_yk=r_Cy1;E_yk=r_Ey1+r_Ey2*dfz;B_yk=(r_By1+r_By4*sr^2)*cos(atan(r_By2*(k-r_By3))); %lam(yk)=1D_Vyk=u_y*Fz*(r_Vy1+r_Vy2*dfz+r_Vy3*sr)*cos(atan(r_Vy4*ta)); %zeta(2)=1S_Vyk=D_Vyk.*sin(r_Vy5*atan(r_Vy6*k)); %取lam(Vyk)=1 S_Hyk=r_Hy1+r_Hy2*dfz;kS=k+S_Hyk;G_yk0=cos(C_yk*atan(B_yk*S_Hyk-E_yk*(B_yk*S_Hyk-atan(B_yk*S_Hyk))));G_yk=cos(C_yk*atan(B_yk.*kS-E_yk*(B_yk.*kS-atan(B_yk.*kS))))/G_yk0;Fy=G_yk.*Fy0+S_Vyk;figure(5);plot(k,Fy,'linewidth',1.5);grid on;xlabel('纵向滑移率');ylabel('侧向力/(N)');title('侧向力-纵向滑移率(混合滑移)');%% Aligning Torque (combined slip)%% ateq is input value, means slip angle%% Mz is output value, means Aligning Torqueateq=(sqrt(a_t.^2+(K_xk/K_ya)^2*(k.^2))).*sign(a_t);areq=(sqrt(ar.^2+(K_xk/K_ya)^2*(k.^2))).*sign(ar);M_zr=D_r*(C_r*atan(B_r*areq));s=R0*(S_sz1+S_sz2*(Fy/Fz0)+(S_sz3+S_sz4*dfz)*sr); %取lambda(s)=1 F_yy=Fy-S_Vyk;t=D_t*cos(C_t*atan(B_t*ateq-E_t.*(B_t*ateq-atan(B_t*ateq))));M_zz=-t.*F_yy;Mz=M_zz+M_zr+s.*Fx;figure(6);plot(a,Mz,'linewidth',1.5);grid on;xlabel('侧偏角');ylabel('回正力矩/(N)');title('回正力矩-侧偏角(混合滑移)');。
Magic Formula轮胎模型

y x Fx Fx 0 , Fy Fy 0 tan 2 2 x y , x , y 1 1
MF模型简介
在Matlab/Simulink中建立的轮胎动力学模型:
工作计划
继续完成仿真工作,完善轮胎模型的参数辨 识; 学习整车模型的建立; 结合FPGA学习卡尔曼算法和非线性观测器。
MF模型简介
Magic Formula 模型:
用特殊正弦函数建立的轮胎纵向力、侧向力和自回正力矩模型。 用一个通过拟合实验数据而得到的三角函数公式来与轮胎实验数 据相吻合, 完全能够表达不同驱动情况时的轮胎特性。 只用一套公式就完整地表达了纯工况下轮胎的力学特性,故称为 魔术公式。 可对轮胎模型的特性进行良好描述,不但可以用函数表述轮胎的 转向力、回复力矩和驱动/制动力,也可以直接利用轮胎实验数据。
MF模型简介
MF公式:
Y=y+Sv y=Dsin{Carctan[Bx-E(Bx-arctanBx)]} x=X+Sh 式中, Y表示侧向力或纵向力,X表示侧偏角α 或滑移率k。 B为刚度因子,C为形状因子,D为峰值因子,E为曲率因子Sv为垂 直偏移,Sh为水平偏移。除C外,该公式中的参数都是垂直载荷Fz 和侧偏角α 的函数。 若计算回正力矩 Mz=-t*Fy+Mzr t(αt)=Dtcos[Ctarctan{Btαt-Et(Btαt-arctan(Btαt))}]cos(α) αt = α + Sht Mz表示回正力矩,t为气胎拖矩,Mzr为残余回正力矩。
3
简化与建立合理的轮胎动力学模型对轮 胎新产品的开发和汽车整车性能的分析 有重要作用。
模型分类
轮胎动力学模型分类
理论模型
经验模型
轮胎模型-PPT精品文档
• 二、 用于耐久性分析的轮胎模型
• 三维接触模型,考虑了轮胎胎侧截面的几何特性,并把轮 胎沿宽度方向离散,用等效贯穿体积的方法来计算垂直力, 可以用于三维路面。该模型是一个单独的License,但是如 果用户只购买Durability TIRE,只能用Fiala模型计算操稳。 • 除了上述两类模型以外,还有环模型,作为子午线轮胎的 近似,研究轮胎本身的振动特性,成为国际上仿真轮胎在 短波不平路面动特性的主流模型,是目前发展比较成熟和 得到商业化应用的轮胎模型,其中具有代表性的是F-tire和 SWIFT轮胎模型。
• SWIFT模型(Short Wave Intermediate Frequency TIRE Model) • SWIFT 模型是由荷兰 Delft 工业大学和 TNO 联合开发的,是 一个刚性环模型,在环模型的基础上只考虑轮胎的 0阶转动 和1阶错动这两阶模态,此时轮胎只作整体的刚体运动而并 不发生变形。在只关心轮胎的中低频特性时可满足要求。由 于不需要计算胎体的变形,刚性环模型的计算效率大大提高, 可用于硬件在环仿真进行主动悬架和ABS的开发。在处理面 外动力学问题时,SWIFT使用了魔术公式。
轮胎模型
一、轮胎模型简介 二 、ADAMS/TIRE 三、轮胎的特性文件
严金霞
2009年1月
• 轮胎是汽车重要的部件,它的结构参数和力学特性决定 着汽车的主要行驶性能。轮胎所受的垂直力、 纵向力、 侧向力和回正力矩对汽车的平顺性、 操纵稳定性和安全 性起重要作用。 • 轮胎模型对车辆动力学仿真技术的发展及仿真计算结果 有很大影响,轮胎模型的精度必须与车辆模型精度相匹 配。因此,选用轮胎模型是至关重要的。由于轮胎具有 结构的复杂性和力学性能的非线性,选择符合实际又便 于使用的轮胎模型是建立虚拟样车模型的关键。
魔术公式轮胎建模

魔术公式
二、建立模型
本程序根据魔术公式的基本结构,在给定参数的基础上,在合理范围内拟定了一部分参数,得到 了仿真结果,从总体上来看复合魔术公式的结果和实际情况。模型程序见附件。 拟定参数:
1000 0 -1000 -2000 -3000 -4000 -10-9 -8 -7 -6 -5 -4 -3 -2 -1 0 1 2 3 4 5 6 7 8 9 10 侧偏角 /(度)
纵向滑移率 纵向力 (组合滑移 )
5000 4000 3000 2000
侧偏力 (组合滑移 )
3000 2000 60 50 40
同济大学 汽车学院 1133090
使用魔术公式的轮胎模型
一、魔术公式简介
魔术公式是用三角函数的组合公式拟合轮胎试验数据, 用一套形式相同的公式就可以完整地表达 轮胎的纵向力Fx、侧向力Fy、回正力矩Mz、翻转力矩Mx、阻力矩My以及纵向力、侧向力的联合作用工 况,故称为“魔术公式”。 魔术公式的一般表达式为:
Y x D sinC arctanBx E Bx arctan Bx
式中Y(x)可以是侧向力,也可以是回正力矩或者纵向力,自变量x可以在不同的情况下分别表示 轮胎的侧偏角或纵向滑移率,式中的系数B、C、D依次由轮胎的垂直载荷和外倾角来确定。 在侧向加速度常见范围≤0.4g,侧偏角≤5°的情景下对常规轮胎具有很高的拟合精度。此外, 由于魔术公式基于试验数据,除在试验范围的高精度外,甚至在极限值以外一定程度仍可使用,可以 对有限工况进行外推且具有较好的置信度。
使用魔术公式的轮胎模型

使用魔术公式的轮胎模型使用魔术公式的轮胎模型主要有Pacejka ’89、Pacejka ’94、MF-Tyre 、MF-Swift 四种。
Pacejka ’89和’94轮胎模型Pacejka ’89 和’94轮胎模型是以魔术公式主要提出者H. B. Pacejka 教授命名的,根据其发布的年限命名。
目前有两种直接被ADAMS 引用。
魔术公式是用三角函数的组合公式拟合轮胎试验数据,用一套形式相同的公式就可以完整地表达轮胎的纵向力F x 、侧向力F y 、回正力矩M z 、翻转力矩M x 、阻力矩M y 以及纵向力、侧向力的联合作用工况,故称为“魔术公式”。
魔术公式的一般表达式为:()()(){}[]Bx Bx E Bx C D x Y arctan arctan sin --=式中Y(x)可以是侧向力,也可以是回正力矩或者纵向力,自变量x 可以在不同的情况下分别表示轮胎的侧偏角或纵向滑移率,式中的系数B 、C 、D 依次由轮胎的垂直载荷和外倾角来确定。
Pacejka ’89轮胎模型认为轮胎在垂直、侧向方向上是线性的、阻尼为常量,这在侧向加速度常见范围≤0.4g ,侧偏角≤5°的情景下对常规轮胎具有很高的拟合精度。
此外,由于魔术公式基于试验数据,除在试验范围的高精度外,甚至在极限值以外一定程度仍可使用,可以对有限工况进行外推且具有较好的置信度。
魔术公式正在成为工业标准,即轮胎制造商向整车厂提供魔术公式系数表示的轮胎数据,而不再是表格或图形。
基于魔术公式的轮胎模型还有较好的健壮性,如果没有某一轮胎的试验数据,而使用同类轮胎数据替代仍可取得很好的效果。
图 基于魔术公式的轮胎模型的输入和输出变量Pacejka ’89轮胎力与力矩的计算 轮胎纵向力计算公式为:()()()()()V X S BX BX E BX C D F +--=111arctan arctan sin其中X 1为纵向力组合自变量:X 1=(κ+S h ),κ为纵向滑移率(负值出现在制动态,-100表示车轮抱死)C ——曲线形状因子,纵向力计算时取B 0值:C = B 0D ——巅因子,表示曲线的最大值:Z Z F B F B D 221+= BCD ——纵向力零点处的纵向刚度:()ZF B Z Z e F B F B BCD 5423-⨯+=B – 刚度因子:B=BCD/(C ×D)S h ——曲线的水平方向漂移:109B F B S Z h += S v ——曲线的垂直方向漂移:S v =0E ——曲线曲率因子,表示曲线最大值附近的形状:8726BF B F B E Z Z ++=图 轮胎属性文件中的纵向力计算系数数据块图 Pacejka ’89轮胎纵向力示例轮胎侧向力计算公式为:()()()()()V Y S BX BX E BX C D F +--=111arctan arctan sin此时的X 1为侧向力计算组合自变量:X 1=(α+S h ),α为侧偏角 C ——曲线形状因子,侧向力计算时取A 0值:C = A 0 D ——巅因子,表示曲线的最大值:Z Z F A F A D 221+= BCD ——侧向力零点处的侧向刚度:()γ5431arctan2sin A A F A BCD Z-⨯⎪⎪⎭⎫ ⎝⎛= B – 刚度因子:B=BCD/(C ×D)S h ——曲线的水平方向漂移:γ8109A A F A S Z h ++=曲线形状因子巅因子计算系数 BCD 计算系数 曲线水平漂移计算系数曲线曲率因子计算系数S v ——曲线的垂直方向漂移:131211A F A F A S Z Z V ++=γE ——曲线曲率因子,表示曲线最大值附近的形状:76AF A E Z +=图 轮胎属性文件中的侧向力计算系数数据块图 Pacejka ’89轮胎纵向力示例轮胎回正力矩计算公式为:()()()()()V Z S BX BX E BX C D M +--=111arctan arctan sin此时的X 1为回正力矩计算组合自变量:X 1=(α+S h ),α为侧偏角 C ——曲线形状因子,回正力矩计算时取C 0值:C = C 0 D ——巅因子,表示曲线的最大值:Z Z F C F C D 221+=BCD ——回正力矩零点处的扭转刚度:()()ZF C Z Z e C F C F C BCD 564231-⨯-⨯+=γB – 刚度因子:B=BCD/(C ×D)S h ——曲线的水平方向漂移:131211C F C C S Z h ++=γ曲线形状因子巅因子计算系数 BCD 计算系数 曲线水平漂移计算系数 曲线曲率因子计算系数 曲线垂直漂移计算系数S v ——曲线的垂直方向漂移:()171615214C F C F C F C S Z Z Z V +++=γE ——曲线曲率因子,表示曲线最大值附近的形状:()()γ1098271C C F C F C E Z Z -⨯++=图 轮胎属性文件中的回正力矩计算系数数据块图 Pacejka ’89轮胎回正力矩示例侧偏刚度(Lateral Stiffness )侧偏刚度在Pacejka ’89和’94轮胎模型中假定是一个常量,在轮胎属性文件的参数PARAMETER 数据段中通过LATERAL_STIFFNESS 语句设定。
轮胎魔术公式

轮胎魔术公式
轮胎魔术公式是指根据车辆轮胎的尺寸,计算出轮胎的直径、周长、速度等信息,以便选择适合的轮胎。
具体计算公式如下:轮胎直径(mm)= 轮胎宽度(mm)× 扁平比率(%)× 2 ÷ 25.4 + 轮轮缘直径(英寸)
轮胎周长(mm)= 轮胎直径(mm)× π
轮胎速度(km/h)= 轮胎周长(mm)× 转速(每分钟)× 60 ÷ 1000
其中,扁平比率指轮胎壁高度与轮胎宽度的比值(例如,扁平比率为45%,表示轮胎壁高度为轮胎宽度的45%)。
π指圆周率,约为3.14。
轮轮缘直径是指轮胎安装时所用的轮轮缘的外直径(单位为英寸)。
以上公式为轮胎魔术公式的基础,可以根据不同情况进行微调。
在购买轮胎时,建议向专业人士咨询,选择符合车辆和驾驶习惯的轮胎。
魔术轮胎公式

2.3.3“魔术公式”轮胎模型“魔术公式”轮胎模型用三角函数的组合公式拟合实验轮胎数据,用一套形式相同的公式就能完整的表达纵向力、侧向力、回正力矩以及纵向力、侧向力联合作用的工况。
该模型统一性强,能描述轮胎所有稳态力学特性,编程方便;可从实际轮胎实验获得,且需拟合的参数少,有实际的物理意义;简单实用,模拟精度高,并能最大限度地反映出车辆的实际运作状况。
故本文采用“魔术公式”轮胎模型一起建立整车系统动力学模型[14]。
“魔术公式”的一般表达式为:SY=Dsin(Carctan(Bφ))+v(2.17)φ=(1-E)(X+h S)+(E/B)arctan(B(X+h S))(2.18)其中,D—峰值因子,表示曲线的最大值;B—刚度因子,B=BCD/(CD);E—曲线曲率因子,决定曲线最大值附近的形状;C—曲线形状因子,决定曲线的形状特性,即曲线是表示侧向力、纵向力还是回正力矩;S—水平方向漂移;hS—垂直方向漂移;v而Y表示侧向力、纵向力或回正力矩,X表示侧偏角α或滑移率λ。
F和侧倾角γ的函除曲线的形状因子C外,其余每一个参数都是垂直载荷z数用参数拟合的方法得到,一般选代数多项式进行拟合。
曲线零点的水平漂移和垂直漂移用来描述由于轮胎制造误差而造成的轮胎圆锥效应和帘布层转向效应。
一般地,曲线零点的水平方向漂移和垂直方向漂移与轮胎侧倾角有关,本文将不考虑轮胎力特性曲线的水平方向漂移和垂直方向漂移,主要从纯滑移及纯侧偏两方面考虑:①纯滑移条件下纵向力公式为:F(λ)=x D sin(x C arctan(x Bλ-x E(x Bλ-arctan(x Bλ))))x0(2.19)式中,x C =1.65;x D =z z F a F a 221+;x B =)exp()5425z z z F a F a F a -+(/(x C x D );x E =8726a F a F a z z ++;λ—车轮滑移率;x0F (λ)—由纯滑移条件下计算出的纵向力的值。
轮胎模型PPT课件

悬架控制系统 的频率大于8Hz 耐久性
可用
可用
适合 适合 适合
可用
适合 适合 适合
可用
第14页/共23页
• FTire支持的四大类路面模型
• 几何简单障碍的路面模型,只需要几个精确参数(如: 正弦波路面、矩形凸块路面、折线路面、斜坡路面等)
• 合成伪随机数据,使用一维或二维动态滤波方法
• 测量的规则栅格数据的路面文件
第1页/共23页
• 一、轮胎模型简介 • 轮胎建模的方法分为三种: • 1)经验—半经验模型 针对具体轮胎的某一具体特性。
目前广泛应用的有Magic Formula公式和吉林大学郭 孔辉院士利用指数函数建立的描述轮胎六分力特性的统 一轮胎半经验模型UniTire,其主要用于车辆的操纵动 力学的研究。
• 轮胎是汽车重要的部件,它的结构参数和力学特性决 定着汽车的主要行驶性能。轮胎所受的垂直力、 纵向 力、 侧向力和回正力矩对汽车的平顺性、 操纵稳定 性和安全性起重要作用。
• 轮胎模型对车辆动力学仿真技术的发展及仿真计算结 果有很大影响,轮胎模型的精度必须与车辆模型精度 相匹配。因此,选用轮胎模型是至关重要的。由于轮 胎具有结构的复杂性和力学性能的非线性,选择符合 实际又便于使用的轮胎模型是建立虚拟样车模型的关 键。
• FTire是高分辨率物理轮胎模型,需要每秒数百万次评价 路面,为了实现空间和时间分辨率,路面模型选择很重要。 RGR路面(规则的栅格路面)是一个高分辨率的路面模 型,它采用等距网格避免寻找三角单元的节点,可选带有 弧形中心线,是特别适合以满足需求的效率,准确性和灵 活性的路面模型。因此,除了简单的几何参数的障碍路面 模 型 , R G R 路 面 是 F T i r e 的第17首页/选共2路3页面 描 述 方 法 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
使用魔术公式的轮胎模型使用魔术公式的轮胎模型主要有Pacejka ’89、Pacejka ’94、MF-Tyre 、MF-Swift 四种。
Pacejka ’89和’94轮胎模型Pacejka ’89 和’94轮胎模型是以魔术公式主要提出者H. B. Pacejka 教授命名的,根据其发布的年限命名。
目前有两种直接被ADAMS 引用。
魔术公式是用三角函数的组合公式拟合轮胎试验数据,用一套形式相同的公式就可以完整地表达轮胎的纵向力F x 、侧向力F y 、回正力矩M z 、翻转力矩M x 、阻力矩M y 以及纵向力、侧向力的联合作用工况,故称为“魔术公式”。
魔术公式的一般表达式为:式中Y(x)可以是侧向力,也可以是回正力矩或者纵向力,自变量x 可以在不同的情况下分别表示轮胎的侧偏角或纵向滑移率,式中的系数B 、C 、D 依次由轮胎的垂直载荷和外倾角来确定。
Pacejka ’89轮胎模型认为轮胎在垂直、侧向方向上是线性的、阻尼为常量,这在侧向加速度常见范围≤0.4g ,侧偏角≤5°的情景下对常规轮胎具有很高的拟合精度。
此外,由于魔术公式基于试验数据,除在试验范围的高精度外,甚至在极限值以外一定程度仍可使用,可以对有限工况进行外推且具有较好的置信度。
魔术公式正在成为工业标准,即轮胎制造商向整车厂提供魔术公式系数表示的轮胎数据,而不再是表格或图形。
基于魔术公式的轮胎模型还有较好的健壮性,如果没有某一轮胎的试验数据,而使用同类轮胎数据替代仍可取得很好的效果。
图 基于魔术公式的轮胎模型的输入和输出变量其中X C D BCD Z Z 43B – 刚度因子:B=BCD/(C ×D)S h ——曲线的水平方向漂移:109B F B S Z h += S v ——曲线的垂直方向漂移:S v =0E ——曲线曲率因子,表示曲线最大值附近的形状:8726BF B F B E Z Z ++=图 轮胎属性文件中的纵向力计算系数数据块图 Pacejka ’89轮胎纵向力示例轮胎侧向力计算公式为:此时的X 1为侧向力计算组合自变量:X 1=(α+S h ),α为侧偏角 C ——曲线形状因子,侧向力计算时取A 0值:C = A 0 D ——巅因子,表示曲线的最大值:Z Z F A F A D 221+= BCD ——侧向力零点处的侧向刚度:()γ5431arctan2sin A A F A BCD Z-⨯⎪⎪⎭⎫ ⎝⎛= B – 刚度因子:B=BCD/(C ×D)S h ——曲线的水平方向漂移:γ8109A A F A S Z h ++= S v ——曲线的垂直方向漂移:131211A F A F A S Z Z V ++=γE ——曲线曲率因子,表示曲线最大值附近的形状:76AF A E Z +=图 轮胎属性文件中的侧向力计算系数数据块图 Pacejka ’89轮胎纵向力示例轮胎回正力矩计算公式为:此时的X 1为回正力矩计算组合自变量:X 1=(α+S h ),α为侧偏角 C ——曲线形状因子,回正力矩计算时取C 0值:C = C 0 D ——巅因子,表示曲线的最大值:Z Z F C F C D 221+=BCD ——回正力矩零点处的扭转刚度:()()ZF C Z Z eC F C F C BCD 564231-⨯-⨯+=γ曲线形状因子巅因子计算系数 BCD 计算系数 曲线水平漂移计算系数曲线曲率因子计算系数 曲线形状因子巅因子计算系数 BCD 计算系数 曲线水平漂移计算系数 曲线曲率因子计算系数 曲线垂直漂移计算系数B – 刚度因子:B=BCD/(C ×D)S h ——曲线的水平方向漂移:131211C F C C S Z h ++=γS v ——曲线的垂直方向漂移:()171615214C F C F C F C S Z Z Z V +++=γE ——曲线曲率因子,表示曲线最大值附近的形状:()()γ1098271C C F C F C E Z Z -⨯++=图 轮胎属性文件中的回正力矩计算系数数据块图 Pacejka ’89轮胎回正力矩示例侧偏刚度(Lateral Stiffness )侧偏刚度在Pacejka ’89和’94轮胎模型中假定是一个常量,在轮胎属性文件的参数PARAMETER 数据段中通过LATERAL_STIFFNESS 语句设定。
侧向形变D e :D e =F y /LATERAL_STIFFNESS ; 翻转力矩:M x = -F z ×D e ;纵向力和侧偏角联合作用的回正力矩M z ;M Z = M Z,MF + Fx ×D e ,这里M Z,MF 为魔术公式计算所得的回正力矩。
滚动阻力(Rolling resistance )滚动阻力系数R R 同样是在轮胎属性文件中规定的具体值,滚动阻力矩M y : M y = F z ×R e ×R R这里:R e 为轮胎的滚动半径;R R 为滚动阻力系数;F z 垂直载荷(kN )。
平滑过渡(Smoothing )是否使用平滑过渡也在轮胎属性文件中规定: ✧ USE_MODE = 1 或 2:关闭平滑过渡 ✧ USE_MODE = 3 或 4:使用平滑过渡轮胎属性文件TR_rear_pac89.tir 全文(示例整车模型MDI_Demo_Vehicle.asy 使用的): $---------------------------------------------------------------------MDI_HEADER [MDI_HEADER] FILE_TYPE = 'tir' FILE_VERSION = 2.0 FILE_FORMAT = 'ASCII'曲线形状因子巅因子计算系数BCD 计算系数曲线水平漂移计算系数曲线曲率因子计算系数曲线垂直漂移计算系数(COMMENTS){comment_string}'Tire - XXXXXX''Pressure - XXXXXX''Test Date - XXXXXX''Test tire''New File Format v2.1'$--------------------------------------------------------------------------UNITS [UNITS]LENGTH = 'mm'FORCE = 'newton'ANGLE = 'radians'MASS = 'kg'TIME = 'sec'$--------------------------------------------------------------------------MODEL [MODEL]! use mode 1 2 3 4! smoothing X X! combined X XPROPERTY_FILE_FORMAT = 'PAC89' 轮胎模型关键词FUNCTION_NAME = 'TYR900' 解算器函数USE_MODE = 4.0 平滑过渡模式$----------------------------------------------------------------------DIMENSION [DIMENSION]UNLOADED_RADIUS = 340.6 轮胎自由半径WIDTH = 255.0 轮胎宽度ASPECT_RATIO = 0.35 高宽比$----------------------------------------------------------------------PARAMETER [PARAMETER]VERTICAL_STIFFNESS = 310.0 纵向刚度系数VERTICAL_DAMPING = 3.1 纵向阻尼系数LATERAL_STIFFNESS = 190.0 侧偏刚度ROLLING_RESISTANCE = 0.0 滚动阻力系数$-----------------------------------------------------------LATERAL_COEFFICIENTS [LATERAL_COEFFICIENTS]a0 = 1.65000a1 = -34.0a2 = 1250.00a3 = 3036.00a4 = 12.80a5 = 0.00501a6 = -0.02103a7 = 0.77394a8 = 0.0022890a9 = 0.013442a10 = 0.003709a11 = 19.1656a12 = 1.21356a13 = 6.26206$-------------------------------------------------------------------longitudinal[LONGITUDINAL_COEFFICIENTS]b0 = 2.37272b1 = -9.46000b2 = 1490.00b3 = 130.000b4 = 276.000b5 = 0.08860b6 = 0.00402b7 = -0.06150b8 = 1.20190b9 = 0.02990b10 = -0.17600$----------------------------------------------------------------------aligning[ALIGNING_COEFFICIENTS]c0 = 2.34000c1 = 1.4950c2 = 6.416654c3 = -3.57403c4 = -0.087737c5 = 0.098410c6 = 0.0027699c7 = -0.0001151c8 = 0.1000c9 = -1.33329c10 = 0.025501c11 = -0.02357c12 = 0.03027c13 = -0.0647c14 = 0.0211329c15 = 0.89469c16 = -0.099443c17 = -3.336941注意:属性文件中的单位数据块[UNITS]不用于魔术公式的系数a,b,c。
开始——初始化种群——终止条件——计算目标函数值——进行非支配排序——分配适应度值——计算小生境数——选择——杂交、变异——去除重复个体、精英保持——新种群优化前 优化后车轮跳动量(mm )前束角(d e g )。