系统稳定性
系统稳定性意义以及稳定性的几种定义-20210310054128
系统稳定性意义以及稳定性的几种定义一、系统稳定性的意义1. 保证业务连续性:系统稳定性是业务连续性的基础。
在一个稳定的系统中,业务流程不会因系统故障而中断,确保企业或个人在关键时刻能够顺利完成任务。
2. 提升用户体验:系统稳定性直接影响用户的使用体验。
一个稳定的系统,让用户在使用过程中感受到流畅、高效,从而提高用户满意度。
3. 降低维护成本:系统稳定性越好,故障发生的概率越低。
这有助于降低系统维护成本,减轻运维人员的工作压力。
4. 增强系统安全性:稳定的系统在一定程度上能够抵御外部攻击,保障数据安全和系统安全。
二、系统稳定性的几种定义1. 工程学视角:在工程学领域,系统稳定性通常指系统在受到外部扰动时,能够自动恢复到平衡状态的能力。
这种定义关注系统在面临各种不确定性因素时的自我调节能力。
2. 控制理论视角:在控制理论中,系统稳定性是指系统在闭环控制作用下,输出信号能否在一定范围内波动,最终趋于稳定。
这种定义强调系统在控制过程中的稳定性。
3. 软件工程视角:在软件工程领域,系统稳定性是指软件系统在运行过程中,能够持续、可靠地完成预定功能,且性能不会随时间推移而明显下降。
4. 经济学视角:在经济学领域,系统稳定性通常指经济系统在各种内外部因素影响下,保持经济增长、就业、物价等宏观指标的稳定。
系统稳定性具有多重含义,不同领域对其有不同的解读。
但无论如何,系统稳定性都是衡量一个系统优劣的重要指标。
三、系统稳定性的影响因素2. 硬件质量:硬件设备的性能和质量直接关系到系统的稳定性。
高质量的硬件能够在恶劣环境下保持稳定运行,减少故障。
3. 软件质量:软件的稳定性和可靠性是系统稳定性的关键。
优秀的软件架构、高效的代码和充分的测试都能提高软件质量。
4. 系统维护:定期的系统维护和更新是保持稳定性的必要手段。
及时修复漏洞、优化性能,可以确保系统长期稳定运行。
5. 外部环境:外部环境的变化,如温度、湿度、电磁干扰等,都可能对系统稳定性产生影响。
判断系统稳定性的方法
判断系统稳定性的方法
1. 监测硬件状态:硬件功能良好是系统稳定的基础,通过检测硬件状态包括主板、CPU、内存等,可以及时识别故障硬件并维修,保证系统的运行稳定性。
2. 监测系统的负载状态:检测系统的资源利用率,包括CPU占用率、内存占用率、磁盘IO等,以便发现系统资源利用过度而导致的异常,避免系统的崩溃。
3. 监测系统运行的日志:现在的操作系统都有完整的系统日志,包括系统的启动记录、错误信息记录等,通过检测系统日志可以发现系统异常的原因,及时修复,保证系统稳定性。
4. 人工测试:测试人员可以根据需求,对系统进行人工测试,模拟不同场景下的使用情况,发现系统漏洞及时修复,以达到系统的稳定性。
5. 自动化测试:利用测试工具进行自动化测试,通过不同的测试用例检测系统的功能、性能、稳定性等方面,识别问题并及时修复,保证系统的稳定性。
信号与系统课件7.2系统的稳定性
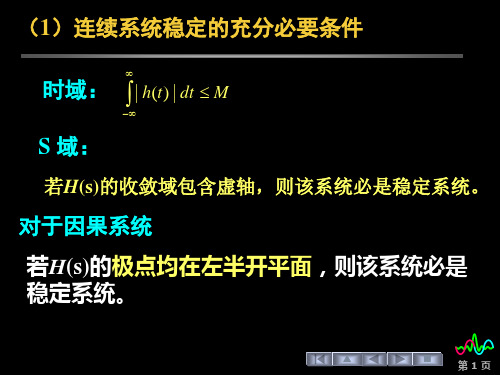
时域: | h(t) | dt M
S 域:
若H(s)的收敛域包含虚轴,则该系统必是稳定系统。
对于因果系统 若H(s)的极点均在左半开平面,则该系统必是 稳定系统。
▲
■
第1页
(2)离散系统稳定的充分必要条件
时域: | h(k) | M k
Z 域:
若H(z)的收敛域包含单位圆,则该系统必是稳定系统。
解:设加法器输出信号X(z)
2
z-1X(z)
X(z)=F(z)+z-1aX(z)
∑
z 1
F(z)
X(z)
a
∑ Y(z)
Y(z)=(2+z-1)X(z)= (2+z-1)/(1-az-1)F(z)
H(z)= (2+z-1)/(1-az-1)=(2z+1)/(z-a)
为使系统稳定,H(z)的极点必须在单位园内, 故|a|<1
例1 A(s)=s3+4s2-3s+2 符号相异,不稳定 例2 A(s)=3s3+s2+2 , a1=0,不稳定 例3 A(s)=3s3+s2+2s+8 需进一步判断,非充分条件。
▲
■
第5页
2、罗斯列表
将多项式A(s)的系数排列为如下阵列—罗斯阵列 第1行 an an-2 an-4 … 第2行 an-1 an-3 an-5 … 第3行 cn-1 cn-3 cn-5 … 它由第1,2行,按下列规则计算得到:
an a0
a2 an2
…
一直到第2n-3行,该行有3个元素。
朱里准则指出:
A(z)=0的所有根都在单位圆内的充分必要的条件是:
第六章 系统的稳定性

6.1 稳定性
1.稳定性的概念 只有稳定的系统才能正常工作。在设计一个系统时,首先要 保证其稳定;在分析一个已有的系统时,也首先要判定其是否 稳定。线性系统是否稳定,是系统本身的一个特性,而与系统 的输入量或扰动无关
6.1 稳定性
2.稳定的条件
6.1 稳定性
2.稳定的条件
6.1 稳定性
2.稳定的条件
a0 {( S P1 )( S P2 ) [( S 1 j1 )( S 1 j1 )][( S 2 j 2 )( S 2 j 2 )] } 0
即a 0 {( S P1 )( S P2 ) [( S 2 2 1 S 1 1 )][( S 2 2 2 S 2 2 )] } 0
例1
已知一调速系统的特征方程式为
S 3 41.5S 2 517 S 2.3 10 4 0
试用劳斯判据判别系统的稳定性。
解:列劳斯表
S3 S2 S1 S
0
1 41.5 38.5
4
517 2.3 10 4
0 0
2.3 10
结论: (1)该表第一列系数符号不全为正,因而系统是不稳定的; (2) 且符号变化了两次,所以该方程中有二个根在S的右半 平面。
6.3 Nyquist(乃奎斯特)稳定判据
幅角原理的简单说明 设有辅助函数为 其零、极点在S平面上的分布如下图 所示,在 S平 面上作一封闭曲线Γs , Γs不通过上述零、极点, 在封闭曲线Γs 上任取一点F(s1) , 其对应的辅助函数 的幅角应为
当解析点S1沿封闭曲线Γs按顺时针方向旋转一周后再回到 s1 点,从图中可以发现,所有位于封闭曲线Γs 外面的辅助函数 的零、极点指向s1 的向量转过的角度都为0,而位于封闭曲 线Γs 内的辅助函数的零、极点指向s1 的向量都按顺时针方向 转过2π弧度(一周)。
系统稳定性的判断方法

系统稳定性的判断方法系统稳定性是指系统在特定条件下保持正常运行的能力,是衡量系统可靠性和健壮性的重要指标。
对于软件系统来说,稳定性是其核心品质之一,因为它直接关系到用户的使用体验和数据的安全性。
因此,对系统稳定性的判断方法至关重要。
下面将介绍几种常见的系统稳定性判断方法。
首先,系统稳定性的判断可以从系统的故障率和可用性两个方面进行评估。
故障率是指在一定时间内系统发生故障的概率,通常用平均无故障时间(MTBF)来表示。
MTBF越长,系统的稳定性就越高。
而可用性则是指系统在规定时间内能够正常工作的概率,通常用百分比来表示。
可用性越高,系统的稳定性就越好。
因此,通过对系统的故障率和可用性进行监测和评估,可以初步判断系统的稳定性。
其次,系统稳定性的判断还可以从系统的负载能力和性能稳定性两个方面进行考量。
负载能力是指系统在承受一定负载时仍能保持正常运行的能力,而性能稳定性则是指系统在一定负载下能够保持稳定的性能表现。
通过对系统的负载能力和性能稳定性进行测试和分析,可以更全面地了解系统在不同负载下的稳定性表现,从而更准确地判断系统的稳定性。
另外,系统稳定性的判断还可以从系统的容错能力和恢复能力两个方面进行考虑。
容错能力是指系统在发生故障时能够自动检测并进行相应的处理,以保证系统的正常运行;而恢复能力则是指系统在发生故障后能够快速恢复到正常状态。
通过对系统的容错能力和恢复能力进行测试和评估,可以更深入地了解系统在面对故障时的应对能力,从而更全面地判断系统的稳定性。
最后,系统稳定性的判断还可以从系统的安全性和可维护性两个方面进行综合考量。
安全性是指系统在面对各种安全威胁时能够保持数据和用户的安全,而可维护性则是指系统在发生故障时能够快速修复和恢复。
通过对系统的安全性和可维护性进行评估,可以更全面地了解系统在面对安全威胁和故障时的表现,从而更准确地判断系统的稳定性。
综上所述,系统稳定性的判断方法包括故障率和可用性、负载能力和性能稳定性、容错能力和恢复能力、安全性和可维护性等多个方面。
系统的稳定性常见判据

定义:
无输入时的初态
系统在初始状态作用下
输入引起的初态
输出
收敛(回复平衡位置)
(响应) 发散(偏离越来越大)
系统稳定 系统不稳定
2. 系统稳定条件
线性定常系统:
anxo(n) (t )
an
1
x ( n1) o
(
t
)
a1
x o(
其中:
A1
an1an2 anan3 an1
A2
an1an4 anan5 an1
A3
an1an6 anan7 an1
B1
A1an3 an1 A2 A1
B2
A1an5 an1 A3 A1
B3
A1an7 an1 A4 A1
s0 F1
Routh 判据:Routh表中第一列各元符号改变的次数等于系统特
t
)
a0 xo(t )
xi(t )
自由响应
强迫响应
n
n
xo(t ) A1ie sit A2ie sit B(t )
i 1
i 1
系统的初态引 输入引起的 起的自由响应 自由响应
si:系统的特征根
2. 系统稳定条件
1) 当系统所有的特征根si(i=1,2,…,n)均具有负实部(位
于[s]平面的左半平面)
lt im
n i 1
A1i e si t
n i 1
A2i e si t
0
自由响应收敛,系统稳定
2) 若有任一sk具有正实部(位于[s]平面的右半平面)
lim e skt
t
ltim
第5章 系统的稳定性

s5 s4 s s
3
1
24
48
0
96
25
50 0
F (s) 2s 4 48s 2 50 0
取F(s)对s的导数得新方程:
2
0
8
24
0
F (s) 8s3 96s 0
用上式中的系数8和96代替0元 行,继续进行运算。
2
50
0
0
s1 s0
112 .7
50
改变符号一次
武汉理工大学材料学院 当解析点s按顺时针方向沿Ls变化一周时,向量F(s)将按顺时针方 向旋转N 周,即F(s)以原点为中心顺时针旋转N 周,这就等于曲线LF 顺时针包围原点N 次。若令Z 为包围于Ls内的F(s)的零点数,P 为包 围于Ls 内的F(s)的极点数,则有 N =Z-P
j
Im
(5.3.2)
武汉理工大学材料学院
(2)令s=z-1,代入特征方程得:
( z 1)3 14( z 1)s 2 40( z 1) 40K 0
即
z 3 11z 2 15z 40K 27 0
由Routh表和Routh判据得:
列Routh表如下:
s3
1
11
15
s2
40 K 27
4 2
解此辅助多项式可得:
s 1; s j5
这两对复根是原特征方程的根的一部分。
武汉理工大学材料学院
四、相对稳定性的检验
对于稳定的系统,应用Routh判据还可以检验系统 的相对稳定性。方法如下: (1)将s平面的虚轴向左移动某个数值,即令s=z- σ (σ 为正实数),代入系统特征方程,则得到关于z的特 征方程。
系统稳定性分析与设计

系统稳定性分析与设计随着信息技术的飞速发展,系统已经成为了现代社会不可或缺的一部分。
一个稳定、可靠的系统对于企业和个人来说都至关重要。
本文将介绍系统稳定性的概念,分析稳定性的重要性以及系统设计中应考虑的稳定性因素,并提出一些提升系统稳定性的设计方法。
一、系统稳定性概述系统稳定性指的是系统在一段时间内保持正常运行的能力。
一个稳定的系统应该能够良好地承载用户的需求,并在面临压力和异常情况时能够保持正常运行,不发生严重错误或崩溃。
系统稳定性不仅仅可以提高用户的满意度,还可以保护企业的利益和声誉。
二、稳定性的重要性1. 用户体验一个稳定的系统可以提供良好的用户体验。
用户希望系统能够稳定地响应他们的操作,并及时提供所需的信息或服务。
如果系统频繁出现错误或崩溃,用户将会感到沮丧和失望,甚至会转向其他竞争对手的系统。
2. 企业利益系统的稳定性直接关系到企业的利益。
如果一个系统经常出现故障或崩溃,企业将面临损失,无法提供正常的服务。
这不仅会导致客户流失,还可能面临赔偿责任。
因此,提升系统稳定性可以有效保护企业的利益。
三、系统设计中的稳定性因素在系统设计过程中,需要考虑以下稳定性因素:1. 异常处理系统应能够及时捕获并处理异常情况,如输入错误、网络断开等。
合理的异常处理可以避免系统崩溃或产生严重错误。
2. 资源管理系统应合理管理资源,如内存、存储、带宽等。
合理的资源管理可以提高系统的性能和稳定性,避免资源耗尽导致系统崩溃。
3. 容错设计容错设计是指在系统出现故障或错误时,能够进行自我修复或快速恢复。
例如,可以使用备份服务器、冗余存储等技术来提高系统的容错性。
4. 监控与维护对系统进行持续的监控和维护是提高稳定性的重要手段。
通过实时监测系统的运行状况和处理性能,及时发现潜在的问题并采取应对措施,可以防患于未然。
5. 安全性系统的安全性也是保证稳定性的重要因素。
系统应具备良好的安全措施,保护用户数据的安全性和隐私。
保证系统不受恶意攻击和非法访问也是提高稳定性的关键。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第五章 系统的稳定性
例: 已知单位反馈系统开环传递函数 2 = GK s s- 1 试判别系统闭环后的稳定性 解:由GK(s)得,开环系统有 一正极点 ∴开环系统不稳定 P=1 GK(j)的N氏图如右。
GK(j)正向包围(-1,jo)点半圈 N = 1= P
=o (-1,jo)
Im
o =
L
第五章 系统的稳定性
D1=an-1>0
an-1 D2 = an an-3 >0 an-2
Dn>0
an-1 an-3 an-5 D3 = an-2 an-4 an-6 >0 0 an-1 an-3
Hurwitz行列式直接由系数排列,规律简单 而明确,因此,比列Routh表要简单些,使用也 较为方便,但对六阶以上的系统,由于行列式 计算麻烦,故应用较少。对于简单形式:
n = 2 : a2 > 0 n = 3 : a3 > 0 n = 4 : a4 > 0 a1 > 0 a2 > 0 a3 > 0 a0 > 0 a1 > 0 a2 > 0 a0 > 0 a1 > 0 a 2 a1 - a 0 a 3 > 0 a0 > 0
2 >0 a1 a 2 a 3 - a12 a 4 - a 0 a 3
1 ×3 - 1 ×5 = -2 1
2 + 2
5 0 0
-2 5
∵ 第一列符号改变两次
∴系统不稳定,有两个具有正实部的特征根。
第五章 系统的稳定性 2)Routh表某行元素全为零:(若第k行)
处理方法: a)以上一行(k-1)行的系数构成一个辅助方程 (阶次一般为偶数)Sn-k+2
b)对该辅助方程求导,所得系数代替k行 c)继续计算Routh表 该情况表示特征根中存在以原点对称的根 i) 存在一对绝对值相等的正负实根 ii) 一对共轭纯虚根 iii)两对复根,实部符号相异,虚部相同 这些根可由辅助方程求得。
§5-1 系统稳定性的基本概念
一、定义:
若控制系统在任何足够小的初
始偏差的作用下,其过渡过程
(输出)随着时间的推移,逐
图5-1
渐衰减并趋于零,具有恢复平 衡状态的能力,则称该系统为稳定。
二、系统稳定的充要条件
系统特征方程的全部特征根均具有负实部。
E X E
第五章 系统的稳定性
§5-2 Routh(劳斯)稳定判据
线性系统稳定的充要条件是其特征方程的所有
特征根均具有负实部。因此,判别系统稳定性需要
求特征根,当系统阶次较高时,求解较为困难。为
此,Routh提出用特征方程的系数来判别根的正负。
第五章 系统的稳定性
一、Routh判据
1.系统稳定的必要条件:
若系统特征方程为: D(s)=ansn +an-1sn-1 +…+a0=0 则全部特征根均具有负实部,必须:
第五章 系统的稳定性
s6 s5 s4 s3 s2
a6 a5 a4 a3
3
a2 a1
-
a0
0 0 0 0
A 1 = a 5 a 4- a 6 a a5 B1
=
A2 = a 5 a
a6 a 1 A = a 5 a o = a 3 0 a5 a5
2
A 1 a3 - a 5 A 2 A1 a 1- a 5 A 3 B2 = A1 A
一单位反馈系统的开环传递函数为 例: K = GK ( s ) (T1s+1 )(T2s+1 )(T3s+1 ) T1, T2,T3均大于0 试判别闭环系统的稳定性。
解:由GK(s)得,开环系统不存在极点落在s 平面的右边,即P=0 开环系统 稳定
-1 2
Im =p0 =0 Re
o
1
1)设GK(j)的N氏图如右:曲线①→K1由图可 知,N氏图不包围(-1,jo)点。 ∴此时系统闭环稳定
1
0 0
C1
=
B 1A 2 - A 1B 2 C = B 1 A 2 B1 B1
3
=
a0
s1 D = C 1 B 2 - B 1 C 2 1 C1
s0 E
=
0
0
0
0
0
0
D 1C 2 D1
= a0
第五章 系统的稳定性
∴判别系统稳定性步骤: 1)系数排成两行
an an-1
an-2 an-3
… …
每一行元素可以同时乘以或除以相同数 2)列出Routh表 3)由稳定判据判断稳定性 第一列符号无改变,系统无实部为正的 特征根→稳定 第一列符号改变n次,则有n个实部为正 的特征根→不稳定
s1
s0
0 0
2
第五章 系统的稳定性
第一列:3 10 4.7
-3.2 2
∵ 第一列符号改变两次 ∴ 系统不稳定,具有两个实部为正的特征根。 3.Routh判据的特殊情况 1)Routh表中某行第一列元素为零,其余列 元素不全为零, 则以很小的正数0
第五章 系统的稳定性
例: D(s)=s3 -3s+2=0 试判别系统的稳定性 s3 1 -3
an>0, an-1>0, …,a0>0
即特征方程各项系数ai >0
第五章 系统的稳定性
2.系统稳定的充要条件: Routh表第一列元素均不为零,且符号相同。 注:特征方程中实部为正的根的个数等于 Routh表中第一列元素符号改变的次数。 以六阶特征方程为例: D(s)=a6s6 +a5s5 +a4s4+a3s3 +a2s2+a1s1+a0=0
0(1)
1 1 ×6 - 3× =3 1
0(3)
1 ×8 - 0 = 8 1
s4+6s2 +8=0
求导得
4s3 +12s=0
s2
s1 s0
0
0 0
0
0 0
1 3
或s3+3s=0
0 0
0
∵ 第一列元素符号没有变化 ∴ 系统稳定
第五章 系统的稳定性
二、Hurwitz(赫尔维兹)判据
D(s)=ansn +an-1sn-1 +…+a0=0
第五章 系统的稳定性
例:设系统的特征方程为 D(s)=3s4+10s3+5s2+s+2=0 试判别系统稳定性 解:列Routh表: s4 3 s3
s2
5
2
10
× 5 - 3×1 10
10
4 .7 ×1 - 10 ×2
4 .7
1
= 4 .7
= - 3 .2
0
=2
×0 10× 2 - 3
10
0 0 0
第五章 系统的稳定性
例: D(s)=s6 +2s5 +8s4 +12s3 +20s2 +16s +16=0 s6 s5 s4 s3 1 2
2× 8 - 1 12 = 2(1) 2
8 12
2 ×20 - 16 = 12 2
20 16 16 0
×
(6)
16(8) 0
0 0
2s +12s2 +16=0
辅助方程 4 或
图5-5
2) 若GK(j)的N氏图包围(-1,jo)点,如曲线②→K2 则系统闭环不稳定 K1K2 放大倍数增大,系统由稳定不稳定
第五章 系统的稳定性
§5-4 系统的相对稳定性
一、Bode判据—N氏判据的引申
由于Bode图和N氏图存在下面的对应关系,因 此可在Bode图上应用N氏稳定性判据来判别闭环系 统的稳定性。
第五章 系统的稳定性
§5-1 系统稳定性的基本概念 §5-2 Routh(劳斯)稳定判据 §5-3 Nyquist稳定判据 §5-4 系统的相对稳定性
第五章 系统的稳定性
主要内容:
1.系统稳定性的概念 2.Routh(劳斯)稳定判据 3.Nyquist(N氏)稳定判据 4.系统的相对稳定性
第五章 系统的稳定性
第五章 系统的稳定性
3. 开环的N氏图对实轴是对称的,因为当 ω由 -ω 变 到 +ω 时, G(-jω)H -jω 与G(jω)H jω 的模相同,而相位相 异,即 G(-jω)H -jω = G(jω)H jω
-G(-jω)H -jω = G(jω)H jω
所以, ω由 - ∞到0与由0到 + ∞ 的开环N氏图对实轴 对称。因而一般只需绘出 ω由0到 + ∞ 的曲线即可判 断系统的稳定性。也就是当开环N氏图在ω由0到 + ∞ 的轨迹包含(-1,j0)点P/2圈则系统稳定(P为开环在 右半平面的极点数)。 4. 系统传递函数分母反映系统本身的固有特性。
极坐标图中单位圆外的部分,|GK(j)|>1,对应 Bode中20lg|GK(j)|>0,0dB线以上。
第五章 系统的稳定性
3)N氏图上,曲线正、负穿越[-1,-]段实轴, 对应对数相频上正、负穿越-180相频线。
() Im
-1 2 -1
-1
+
1 2
(-1,jo)
0 Re o
1 + 2 -1 2
s2
s1 s0
0()
-3-2
2
0 0
2
∵ 第一列符号改变两次 ∴系统不稳定,有两个具有正实部的特征根。
第五章 系统的稳定性
例:D(s)=s5 +s4 +2s3 +2s25 s4 s3 s2 s1 s0
1 1
1 ×2 - 1 ×2 = 0( ) 1