第5章 平面问题和轴对称问题的有限元法
有限元法及其应用

有能限源元与法动及力其学应院用·2·20022研研究究室室 TTele:l:
1.1 有限元法的发展简史
固体力学→流体力学、传热学和 电磁学等
弹性材料→弹塑性、塑性、黏弹 性、黏塑性和复合材料等
航空领域→宇航、土木建筑、机 械制造、水利工程、船舶海洋工程与 核工程等领域
有能限源元与法动及力其学应院用·2·20022研研究究室室 TTele:l:
1.1 有限元法的发展简史
1980年代,多种功能扩大,大型 通用程序如ADINA等,微型计算机, 前后处理出现。
1990年代,领域扩大,前后处理 功能增强,大型商用软件,如ANSYS 、MARC、NASTRAN等。
有能限源元与法动及力其学应院用·2·20022研研究究室室 TTele:l:
1.1 有限元法的发展简史
• 整级叶片接触振动分析(第四阶振型)
有能限源元与法动及力其学应院用·2·20022研研究究室室 TTele:l:
1.1 有限元法的发展简史
• 涡轮盘强度疲劳分析
有能限源元与法动及力其学应院用·2·20022研研究究室室 TTele:l:
1.1 有限元法的发展简史
• 喷嘴热固耦合分析
1.2 弹性力学的基本概念
斜面上的正应力分量为
n pxl pym pzn xl2 ym2 zn2 2yzmn2zxnl2xylm
有能限源元与法动及力其学应院用·2·20022研研究究室室 TTele:l:
1.2 弹性力学的基本概念
斜面上的切应力分量为
npx2py2pz2n2
有能限源元与法动及力其学应院用·2·20022研研究究室室 TTele:l:
三维问题有限元分析(包括轴对称问题)

空间问题简介
工程实际中的很多问题难于简化为平面问题,如受任意 空间载荷作用的任意形状几何体,受对称于轴线载荷作 用的回转体,这类问题经典弹性力学往往无能为力。在 FEM中,空间问题只要求0阶连续,因此构造单元方便
➢空间问题的主要困难: (1)离散化不直观;————(网格自动生成) (2)分割的单元数量多,未知量的数目剧增。— ——— (对某些问题简化)——— ——— (轴对称问题) ➢空间分析的优点
p
s
C
(6-16)
e 1
e 1
式中
F e ——单元上集中力等效结点载荷列向量;
p
F e ——单元上表面力等效结点载荷列向量;
S
F e ——单元上体积力等效结点载荷列向量;
F e
——单元结点载荷列向量。
C
等效结点力公式为 Fe NTF p
式中
Fe SSeNTpSds
Fe VeNTpvdV
如同平面等参单元一样,需要通过雅克比矩阵来实现,由偏导法则
N i N xi x N yi y N zi z
同理可得
N i , N i
写成矩阵
Ni
x
y
z
Ni x
Ni x
Ni
x
y
z
Ni y
J
Ni y
Ni
x
y
z
Ni z
ui vi wi
(6-18)
式中
xi、yi、zi——结点i的坐标; ui、vi、wi——结点i沿x、y、z方向的位移; Ni——对应于i结点的形状函数。
在自然坐标系(局部坐标系)中,各结点的形状函数可写成如
下形式, 对于8个顶角结点( i=1,2,……,8)
有限元讲义弹性力学平面问题有限单元法(四结点四边形等参元,八结点曲线四边形等参元,问题补充)分析
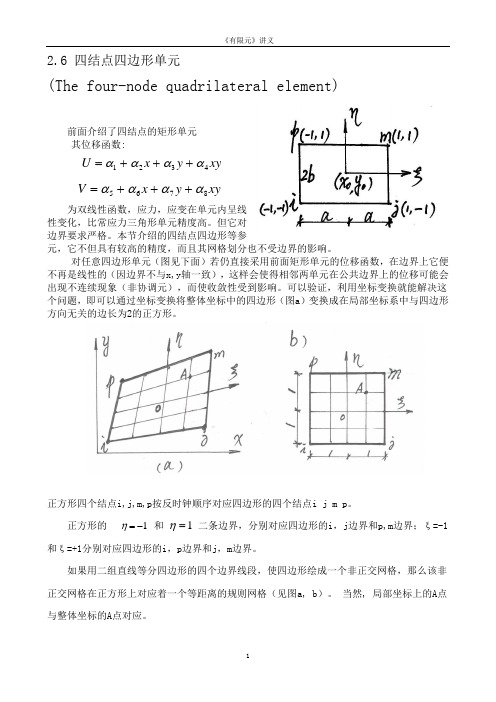
2.6 四结点四边形单元(The four-node quadrilateral element)前面介绍了四结点的矩形单元其位移函数:xy y x U 4321αααα+++=xy y x V8765αααα+++=为双线性函数,应力,应变在单元内呈线性变化,比常应力三角形单元精度高。
但它对边界要求严格。
本节介绍的四结点四边形等参元,它不但具有较高的精度,而且其网格划分也不受边界的影响。
对任意四边形单元(图见下面)若仍直接采用前面矩形单元的位移函数,在边界上它便不再是线性的(因边界不与x,y 轴一致),这样会使得相邻两单元在公共边界上的位移可能会出现不连续现象(非协调元),而使收敛性受到影响。
可以验证,利用坐标变换就能解决这个问题,即可以通过坐标变换将整体坐标中的四边形(图a )变换成在局部坐标系中与四边形方向无关的边长为2的正方形。
正方形四个结点i,j,m,p 按反时钟顺序对应四边形的四个结点i j m p 。
正方形的 1-=η 和 1=η 二条边界,分别对应四边形的i ,j 边界和p,m 边界;ξ=-1和ξ=+1分别对应四边形的i ,p 边界和j ,m 边界。
如果用二组直线等分四边形的四个边界线段,使四边形绘成一个非正交网格,那么该非正交网格在正方形上对应着一个等距离的规则网格(见图a, b )。
当然, 局部坐标上的A 点与整体坐标的A 点对应。
一、四结点四边形等参单元的形函数及坐标变换由于可以将整体坐标下的四边形单元变换成局部坐标下的正方形单元,对于这种正方形单元,自然仍取形函数为: ξηαηαξαα2321+++=U ξηαηαξαα8765+++=V引入边界条件,即可得位移函数:∑=ijmpi i U N Ui ijmpi V N V ∑==写成矩阵形式:{}{}[]{}ee p i p i ed N d N N N N V U f =⎥⎦⎤⎢⎣⎡=⎭⎬⎫⎩⎨⎧=000 式中形函数: ()()()ηηξξηξi i i N ++=1141, ()p m j i ,,, 按照等参元的定义,我们将坐标变换式亦取为: p p m m j j i i i ijmpi x N x N x N x N x N x +++==∑p p m m j j i i i ijmpi y N y N y N y N y N y +++==∑ ()162-- 式中形函数N 与位移函数中的完全一致。
有限元法基础讲义
有限元法的基本概念
结构离散化: 1)划分网格; 2)载荷移置; 3)简化约束。
单元刚度矩阵与刚度系数: 1)单元刚度矩阵物理意义为单元抵抗变形的能力; 2)刚度系数的物理意义是产生单位位移时需要的力的大小。
南京航空航天大学能源与动力学院机械振动冲击仿真研究室(PC:210016)
南京航空航天大学能源与动力学院机械振动冲击仿真研究室(PC:210016)
Tel:(025)4892202-2504 Fax:(025)4895966
本课程的要求
1. 做好笔记,及时复习与总结 2 . 阅读参考书籍独立上机操作 3 . 独立上机操作
南京航空航天大学能源与动力学院机械振动冲击仿真研究室(PC:210016)
南京航空航天大学能源与动力学院机械振动冲击仿真研究室(PC:210016)
Tel:(025)4892202-2504 Fax:(025)4895966
弹性力学中的基本概念
六个剪应力之间有一定的互等关系。例如,以ab为矩轴,可得:
2 zx y 2 yx z 0
由于单元可以被分割各种形状和大小不同的尺寸,所以它能很 好的适应复杂的几何形状,复杂的材料特性和复杂的边界条件,再 加上它有成熟的大型软件系统支持,使它已成为一种非常受欢迎的, 应用极广的数值计算方法。
南京航空航天大学能源与动力学院机械振动冲击仿真研究室(PC:210016)
Tel:(025)4892202-2504 Fax:(025)4895966
lim Q F (N/m2)
S S0
南京航空航天大学能源与动力学院机械振动冲击仿真研究室(PC:210016)
5 平面问题和轴对称问题的有限元法

( x
1
y
)
y
1 2 E
(
y
1
x)
xy
xy G
2(1 E
)
xy
八未知量:
u, v, x, y, xy, x, y, xy。八个 方程,加上 约束条件, 理论上可求 解各种弹性 力学 的平面 问题
5.1.2平面问题的三角形单元求解
形函数:
Ns
1 2A (as
bsr
cs z)
(s i, j, m)
19
5.2 轴对称问题
用矩阵表示的单元位移为:
d
u w
Ni 0
0 Ni
Nj 0
0 Nj
Nm 0
单元应变: 将单元位移函数带入几何方程得:
ui
wi
0 Nm
e
2
(6)求节点力与节点位移的关系
对于一个已经编排好节点号的系统,按节点号叠加单元刚度矩 阵中的元素可得到总体刚度矩阵,在引入一定的边界条件和外 载荷后即可求解。最后的计算格式可记为
2019/10/15
{F}={K}{δ}
5.2 轴对称问题
一、轴对称问题的定义
如果物体的几何形状、约束 情况及所受的外力都对称于 空间的某一根轴(如Z轴), 则通过该轴的任何平面都是 物体的对称面,物体内的所 有应力、应变和位移都关于 该轴对称,这类问题称为轴 对称问题。
1 2A
abii ci
aj bj cj
am bm
有限元原理与应用
第二节 平面刚架有限元法
二、单元分析
第二节 平面刚架有限元法
二、单元分析
第二节 平面刚架有限元法
二、单元分析
第二节 平面刚架有限元法
二、单元分析
第二节 平面刚架有限元法
二、单元分析
第二节 平面刚架有限元法
三、坐标变换
第二节 平面刚架有限元法
三、坐标变换
第二节 平面刚架有限元法
三、坐标变换
四 载荷移置
第二节 平面问题有限元法
四 载荷移置
第二节 平面问题有限元法
五 约束处理
第二节 平面问题有限元法
五 约束处理
第二节 平面问题有限元法
五 约束处理
第二节 平面问题有限元法
五 约束处理
第二节 平面问题有限元法
六 求解线方程组
七 计算其它物理量
第二节 平面问题有限元法
八 计算结果处理
第二节 轴对称问题有限元法
二、单元分析
第二节 轴对称问题有限元法
第二节 轴对称问题有限元法
第二节 轴对称问题有限元法
第二节 轴对称问题有限元法
第二节 轴对称问题有限元法
三、单元刚度矩阵
第二节 轴对称问题有限元法
三、单元刚度矩阵
第二节 轴对称问题有限元法
三、单元刚度矩阵
第二节 轴对称问题有限元法
第二节 平面问题有限元法
3 总刚矩阵的特点
第二节 平面问题有限元法
3 总刚矩阵的特点
第二节 平面问题有限元法
四 载荷移置
第二节 平面问题有限元法
四 载荷移置
第二节 平面问题有限元法
四 载荷移置
第二节 平面问题有限元法
四 载荷移置
第二节 平面问题有限元法
有限元第五讲 平面问题(二)——离散化、三角形单元分析
该式建立了用单元节点位移表 达单元上应变分布的关系。
B 称为应变矩阵,其一个子块的计算式为:
(i l , m, n)
•
对简单三角形单元,应变矩阵为:
上面求出的待定系数 a1
~ a6 代回位移多项式,得到:
al 1 y bl 2 cl am bm cm a n ul bn um u cn n
u 1 x
ul 1 al bl x cl y am bm x cm y an bn x cn y um 2 u n ul N l N m N n um N l ul N mum N nun N i ui i l , m , n u n
xl xn yl ym yn
am bm cm
an ul bn um u cn n
2 1 xm
为三角形面积
节点坐标行列式
ak , bk , ck 分别是节点坐标行列式 的第k (k l,m,n)行第1, 2, 3个 元素的代数余子式,均为常数。
~ a3 : yl a1 ym a2 a yn 3
1
a1 1 xl a2 1 xm a 1 x n 3
其中:
yl ym yn
1 1
ul al 1 bl um u 2 c n l
yl ym yn
1
vl al 1 bl vm v 2 c n l
第5章 有限元法-1
(5-2)
称为单元的节点力列阵;若 {F} 为外载荷,则称为载荷列阵。
显然,梁的节点力和节点位移是有联系的。在弹性小变形范围 内,这种关系是线性的,可用下式表示
Fxi
Fyi
k11 k21
k12 k22
k13 k23
k14 k15 k24 k25
k16 k26
ui
vi
M zi
Fxj
EA , l
根据静力平衡条件
Fyi 0,
M zi 0
EA Fxj Fxi l ,
Fyj Fyi 0,
M zj 0
由式(5-3a)解得
k11
Fxi
EA , l
k41
Fxj
EA , l
k21 Fyi 0, k51 Fyj 0,
k31 M zi 0 k61 M zj 0
(2) 同理,设vi=1,其余位移分量均为零,即ui=iz=uj=vj=zj= 0,
图5-4所示是xoy平面中的一简支梁简图,现以它为例,来说明 用直接刚度法建立单元刚度矩阵的思想和过程。
图5-4 平面简支梁元及其计算模型
由上图可见:
梁在横向外载荷(可以是集中力或分布力或力矩等)作用下产 生弯曲变形,在水平载荷作用下产生线位移。
对于该平面简支梁问题: 梁上任一点受有三个力的作用: 水平力Fx,
位移法优点是比较简单,规律性强,易于编写计算机程序。所以 得到广泛应用,其缺点是精度稍低。
(2)力法
该法是以节点力作为基本未知量,在节点处建立位移连续方 程,求解出节点力后,再求解节点位移和单元应力。
力法的特点是计算精度高。
(3)混合法
此法是取一部分节点位移和一部分节点力作为基本未知量,建 立平衡方程进行求解。
第5章 平面问题和轴对称问题 (2)
2.平面应变问题的应力分析
因: xz yz 0 则 xz yz 0 ,即Z向为一 个主方向,假定 z 3 ,根据应力应变顺序 关系有:
z
1 2
(
x
y)
1 2
( 1
2)
m
则应力张量、应力偏张量分别为:
ij
0
0
z
0
z 0 z
应力平衡微分方程:
z 0
z
z z z 0 z
圆柱体在平砧上镦粗时,有 平衡微分方程为:
z 0 z
拉深件底部的网格基 本上保持不变,而 简壁的网格则发生 了很大的变化,原 来的同心圆变成了 筒壁上的水平圆筒 线,而且其间的距 离也增大了。越靠 近筒口增大越多, 原来分度相等的辐 射线变成等距的竖 线,即每一扇形面 积内的材料都各自 在其范围内沿着半 径方向流动。每一 梯形块进行流动时 ,周围方向被压缩 ,半径方向被拉长 ,最后变成筒壁部 分。
2.平面应力状态的应变分析
1)沿 3 方向的应变 3 为最小主应力,根据应力应变顺序关系, 3 0
3 为中间主应力,根据应力应变顺序关系有:
3
1
2
2
3 0
压缩类变形;
3
1
2
2
3 0 伸长类变形
3
1
2
2
3 0 纯切变形
3 为最大主应力,根据应力应变顺序关系 3 0
的点A、E处于单项拉伸状态;与 1 、 2 的
有限元方法-第五章--平面三角形单元
D
E
1 2
1
0
对 1 0
称
1
(i)
2
所以,[S]的子矩阵可记为
Si DBi
E
2 1 2
bi
1
bi
2
ci
ci
1
ci
2
bi
( i
,
j
,
m轮换) (5-19)
对于平面应变问题,只要将 (i) 式中的E换成E/1-2 , 换成 /1-,即得到其弹性矩阵
D
1
E1 1 2
1
1
起来,便可近似地表示整个区域的真实位移函数。这种 化繁为简、联合局部逼近整体的思想,正是有限单元法 的绝妙之处。
基于上述思想,我们可以选择一个单元位移模式,
单元内各点的位移可按此位移模式由单元节点位移通过
插值而获得。线性函数是一种最简单的单元位移模式,
故设
u 1 2x 3y
v 4 5x 6y
(b)
0
(b)
Ni xm
,
ym
1 2
ai
bi xm
ci ym
0
(c)
类似地有
N j xi , yi 0 , N j x j , y j 1 , N j xm , ym 0 (d) Nm xi , yi 0 , Nm x j , y j 0 , Nm xm , ym 1
式中 1、2、…6是待定常数。因三角形单元共有六个
自由度,且位移函数u、v在三个节点处的数值应该等于 这些点处的位移分量的数值。假设节点i、j、m的坐标分 别为(xi , yi )、(xj , yj )、(xm , ym ),代入 (b) 式, 得:
ui 1 2 xi 3 yi
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
µ
1− µ 1
轴对称问题分析
• 在任何一个过 轴的子午面上的位移、应变和应力的分布 在任何一个过z轴的子午面上的位移、 轴的子午面上的位移 规律都相同。因此轴对称问题可把三维问题简化为以( 规律都相同。因此轴对称问题可把三维问题简化为以(z ,r)为自变量的二维问题。 )为自变量的二维问题。 • 在ANSYS程序中,轴对称模型必须在总体坐标系的 程序中, 总体坐标系的XOY 程序中 轴对称模型必须在总体坐标系的 平面的第一象限中创建,并且总体坐标系的Y就是旋转对 平面的第一象限中创建,并且总体坐标系的 就是旋转对 称轴,X轴指向径向方向 轴指向径向方向, 方向代表环向方向 方向代表环向方向; 称轴 轴指向径向方向,Z方向代表环向方向;环向位移 为0,但存在明显的环向应变和应力;仅仅承受轴向载荷 ,但存在明显的环向应变和应力; Y 不允许有负坐标。 ;不允许有负坐标。 • 求解时,施加自由度约束、压力载荷、温度约束 求解时,施加自由度约束、压力载荷、 方向加速度可以像其他非轴对称模型一样施加。 和Y方向加速度可以像其他非轴对称模型一样施加。 方向加速度可以像其他非轴对称模型一样施加
P
x
受内压的圆柱管道
长水平巷道等
5.1 平面问题基本知识
• 一、平面应变问题 • 在ANSYS中,总是将几何尺寸很大的方向制定为 中 总体坐标系的Z方向 方向, 总体坐标系的 方向,模型需要在总体坐标系的 XOY平面内建立模型,这时 方向的应变为 ,但 平面内建立模型, 方向的应变为0, 平面内建立模型 这时Z方向的应变为 存在应力; 存在应力; • 常用结构单元类型有:plane42、 plane82、 常用结构单元类型有: 、 、 plane182、 plane183等,设置单元 等 设置单元KEYOPT(3) 、 为Plane strain.
0 0 u 0 v ∂ ∂r
5.2 轴对称问题基本理论 轴对称问题基本理论
二、基本变量和基本方程
物理方程
1 ε r = E [σ r − µ (σ θ + σ z )] 1 ε θ = [σ θ − µ (σ z + σ r )] E 1 ε z = [σ z − µ (σ r + σ θ )] E 1 2(1 + µ ) τ rz γ rz = G τ rz = E
首先试试构件向x 首先试试构件向x 方面移 动。 那样边界部分从假想镜面 前慢慢地出来, 前慢慢地出来,这不是镜 面映照。 面映照。 所以约束x 方向的位移。 所以约束x 方向的位移。 X 方向的位移约束 其次向y 其次向y 方向运动试试看 这样的话,没问题, ,这样的话,没问题, 边界面就能动起来, 边界面就能动起来,但是 不会从假象中的镜面滑出 来。
• 在建立对称模型时,注意尽量将对称平面放置在总体坐标 在建立对称模型时, 系的某个坐标平面上, 系的某个坐标平面上,以便后处理时十分方便的进行结果 和模型的对称扩展处理。 和模型的对称扩展处理。 • 在进行对称性模型的分析时,必须指定对称平面,即明确 在进行对称性模型的分析时,必须指定对称平面, 定义对称平面上的点、 定义对称平面上的点、线、面或节点具有对称性位移边界 条件。 条件。 ANSYS提供了模型和计算结果对称扩展功能,使用户仅 提供了模型和计算结果对称扩展功能, 提供了模型和计算结果对称扩展功能 仅计算部分对称模型然后通过对称扩展获得全部模型及其 结果显示。 结果显示。 Utility Menu>Plotctrls>Style>Symmetry Expansion>Periodic/Cyclic Symmetric Expansion
• (2)平面反对称性模型 平面反对称性模型 • 与对称模型类似,当分析模型的几何拓扑结构、 与对称模型类似,当分析模型的几何拓扑结构、 材料分布相对某一个平面具有对称性, 材料分布相对某一个平面具有对称性,但是载荷 分布相对该平面具有反对称性,可以建立相对该 分布相对该平面具有反对称性, 平面的1/2对称模型进行分析, 平面的 对称模型进行分析,求解时施加反对称 对称模型进行分析 位移边界条件; 位移边界条件;
(a)有一个对称的例子 有一个对称的例子
(b)有二个对称的例子 有二个对称的例子
(c)有12 个对称的例子 有
(d)有无数对称的例子 有无数对称的例子
[图1 对称问题 图 对称问题]
二、 模型化 • (1)平面对称性模型 平面对称性模型 • 当分析模型的几何拓扑结构、材料分布和载荷分布同时相 当分析模型的几何拓扑结构、 对某一个平面具有对称性时,称模型相对该平面对称, 对某一个平面具有对称性时,称模型相对该平面对称,可 以建立相对该平面的1/2对称模型进行分析; 以建立相对该平面的 对称模型进行分析;当模型同时 对称模型进行分析 具有两个或更多的对称平面时,就可以建立1/4对称模型 具有两个或更多的对称平面时,就可以建立 对称模型 对称模型等。 或1/8对称模型等。 对称模型等
5.1 平面问题基本知识
二、平面应力问题 1. 特点: 特点: 1) 长、宽尺寸远大于厚度 2) 沿板面受有平行板面的面力,且沿厚度均布,体力 沿板面受有平行板面的面力,且沿厚度均布, 平行于板面且不沿厚度变化, 平行于板面且不沿厚度变化,在平板的前后表面上 无外力作用。 无外力作用。 例如: 例如: y x
5.1 平面问题基本知识
• 二、平面应力问题 • 在ANSYS中,模型需要在总体坐标系的 中 模型需要在总体坐标系的XOY平面 平面 内建立模型,这时Z方向的应力为 方向的应力为0, 内建立模型,这时 方向的应力为 ,但存在应变 ; • 常用结构单元类型有:plane42、 plane82、 常用结构单元类型有: 、 、 plane182、 plane183等,设置单元 、 等 设置单元KEYOPT(3) 为Plane stress或Plane stress with thickness 或 input.
轴对称问题力学模型
5.2 轴对称问题基本知识
• 轴对称结构体可以看成由任意 一个纵向剖面绕着纵轴旋转一 周而形成。 周而形成。此旋转轴即为对称 纵向剖面称为子午面 子午面。 轴,纵向剖面称为子午面。 • 对于轴对称问题,采用圆柱坐 对于轴对称问题, 标较为方便。 标较为方便。 • 以弹性体的对称轴为 轴,其 以弹性体的对称轴为z轴 约束及外载荷也都对称于z轴 约束及外载荷也都对称于 轴 因此弹性体内各点的各项应 ,因此弹性体内各点的各项应 力分量、 力分量、应变分量和位移分量 都与环向坐标θ无关 只是径 无关, 都与环向坐标 无关,只是径 向坐标r和轴向坐标 的函数。 和轴向坐标z的函数 向坐标 和轴向坐标 的函数。
方向运动, 向z 方向运动,与Y方向是 同样的。 同样的。
下面绕x 轴旋转。 下面绕x 轴旋转。 这也没问题。可以知道。 这也没问题。可以知道。
使构件绕y 轴旋转, 使构件绕y 轴旋转,边界 面并不会滑出来, 面并不会滑出来,然而靠 眼前的那一侧下降另一面 则上升。 则上升。而对着镜面照映 时,另一面也必须是下降 所以绕y 的。所以绕y 轴的转角也 要约束。 要约束。 Y 轴的转角约束 轴旋转就已经知道了。 绕z 轴旋转就已经知道了。 构件因为要陷入到假象的镜 面中去,所以不约束不行。 面中去,所以不约束不行。 Z 轴的转角约束
µ
1− µ ε r 0 ε θ ε 0 z 1 − 2 µ γ rz 2(1 − µ µ σ r σ 1 E (1 − µ ) θ= σ= σ z (1 + µ )(1 − 2µ ) 对 τ rz 称
j
z
d
Y
c
m
i i
m j
θ a b
r
O X
轴对称结构
5.2 轴对称问题基本理论
二、 基本变量和基本方程
微元体及应力分量 四个应力分量
σ = [σ r σ θ
σ z τ rz ]
T
四个应变分量
ε = [ε r
εθ
ε z γ rz ]
T
几 何 方 程
∂u ∂ ∂r ∂r ε r u 1 ε θ r =r = ε = ε z ∂w ∂ ∂z ∂z γ rz ∂u ∂w ∂ + ∂z ∂r ∂z
第5章 平面问题和轴对称问题的有限元法 5.1 平面问题基本知识 5.2 轴对称问题基本知识 5.3 具有对称性结构的分析 5.4 练习题
5.1 平面问题基本知识
• 一、平面应变问题
1. 特点: 特点: 1) z向尺寸远大于 ,y向尺寸,且与 轴垂直的各个横 向尺寸远大于x, 向尺寸 且与z轴垂直的各个横 向尺寸, 向尺寸远大于 截面尺寸都相同。 截面尺寸都相同。 2) 受有平行于横截面(x、y平面)且不沿 向变化的 受有平行于横截面( 、 平面 且不沿z向变化的 平面) 外载荷(包括体力x、 , ),约束条件沿 外载荷(包括体力 、y,但z=0),约束条件沿 向 ),约束条件沿z向 也不变。 也不变。即,所有内在因素和外来作用都不沿长度 变化。 变化。 y
5.2 轴对称问题基本知识
一、轴对称问题的定义 如果物体的几何形状、 如果物体的几何形状、约束 几何形状 情况及所受的外力都对称于 空间的某一根轴( 空间的某一根轴(如Z轴), 轴 则通过该轴的任何平面都是 物体的对称面, 物体的对称面,物体内的所 应力、 有应力、应变和位移都关于 该轴对称,这类问题称为轴 该轴对称,这类问题称为轴 对称问题。 对称问题。
自由度约束的操作
对称(Symmetry B.C.)和反对称约束 对称 和反对称约束(Antisymm B.C.) 和反对称约束 对称边界线 建造的1/2模型 建造的 模型
F
F
建造的1/2模型 建造的 模型 对称模型