嵌入式 步进电机(环形分配器)
步进电机环形分配器
步进电机环形分配器(1)工作原理步进电机控制主要有三个重要参数即转速、转过的角度和转向。
由于步进电机的转动是由输入脉冲信号控制,所以转速是由输入脉冲信号的频率决定,而转过的角度由输入脉冲信号的脉冲个数决定。
转向由环形分配器的输出通过步进电机A、B、C相绕组来控制,环形分配器通过控制各相绕组通电的相序来控制步电机转向。
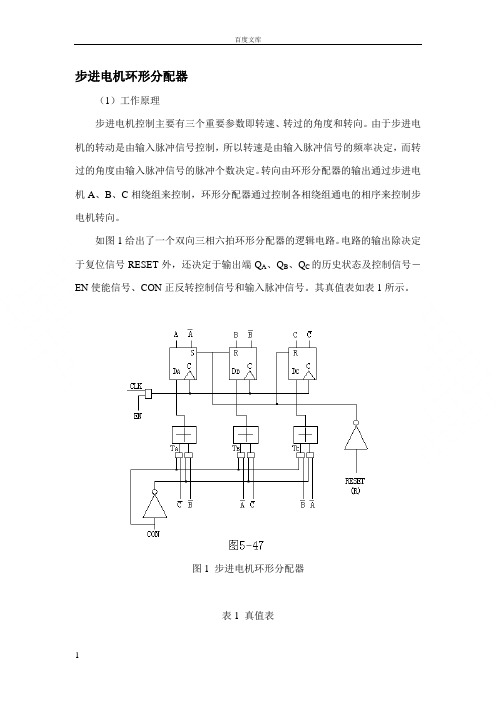
如图1给出了一个双向三相六拍环形分配器的逻辑电路。
电路的输出除决定于复位信号RESET外,还决定于输出端Q A、Q B、Q C的历史状态及控制信号-EN使能信号、CON正反转控制信号和输入脉冲信号。
其真值表如表1所示。
图1 步进电机环形分配器表1 真值表(2)程序设计程序设计采用组合逻辑设计法,由真值表可知:当CON=0时,输出Q A、Q B、Q C的逻辑关系为:当CON=1时,输出Q A、Q B、Q C的逻辑关系为:当CON=0,正转时步进机A、B、C相线圈的通电相序为:当CON=1,反转时各相线圈通电相序为:Q A、Q B、Q C的状态转换条件为输入脉冲信号上升沿到来,状态由前一状态转为后一状态,所以在梯形图中引入了上升沿微分指令。
PLC输入/输出元件地址分配见表2。
表2 PLC输入/输出元件地址分配表根据逻辑关系画出步进电机机环形分配器的PLC梯形图,如图2所示。
CON10Z EN CLK A B C A B C1ΦΦ10010001↑10111001↑00101001↑01101101↑01000101↑11010101↑100100PLC IN代号PLC OUT代号X0CLK Y0Q AX1EN Y1Q BX2RESET Y2QcX3CON图2 环形分配器的梯形图梯形图工作原理简单分析如下:设初始状态为RESET有效。
X2常开触点闭合,Y0输出为“1”状态,Y1、Y2为“0”状态,RESET无效后,上述三输出状态各自保持原状态。
CON=0(X3=0),当EN(X1=1)有效,且有输入脉冲信号CLK(X0)输入,CLK(X0)上升沿到来,M0辅助继电器常开触点闭合一个扫描周期。
步进电机三相六拍环形分配器

10.2 步进电动机位置控制系统10.2.2 步进电动机的脉冲分配电路1. 硬件脉冲分配器电路步进电动机的脉冲分配可以由硬件和软件两种方法来实现。
硬件环形分配器需要根据步进电动机的相数和要求的通电方式而设计专门的电路,图10.6所示为一个三相六拍的环形分配器。
分配器的主体是三个J-K触发器。
三个J-K触发器的Q输出端分别经各自的功放线路与步进电动机A、B、C三相绕组连接。
当QA=1时,A相绕组通电;QB=1时,B相绕组通电;QC=1时,C相绕组通电。
DR+和DR-是步进电动机的正反转控制信号。
正转时,各相通电顺序:A-AB-B-BC-C-CA反转时,各相通电顺序:A-AC-C-CB-B-BA图10.6 三相六拍环形分配器图10.6所示为的三相六拍环形分配器逻辑真值表如表10.1所示。
序号控制信号状态输出状态导电绕组表10.1 三相六拍环形分配器逻辑真值表2. 软件脉冲分配对于不同的计算机和接口器件,软件环分有不同的形式,现以AT89C51单片机配置的系统为例加以说明。
(1)由P1口作为驱动电路的接口控制脉冲经AT89C51的并行I/O接口P1口输出到步进电动机各相的功率放大器输入,设P1口的P1.0输出至A相,P1.1输出至B相,P1.2输出至C相。
(2)建立环形分配表为了使电动机按照如前所述顺序通电,首先必须在存储器中建立一个环形分配表,存储器各单元中存放对应绕组通电的顺序数值,如表10.2所示。
当运行时,依次将环形分配表中的数据,也就是对应存储器单元的内容送到P1口,使P1.0、P1.1、P1.2依次送出有关信号,从而使电动机轮流通电。
表10.2 三相六拍软件环形分配数据表表为三相六拍环形分配表,K为存储器单元基地址(十六位二进制数),后面所加的数为地址的索引值。
可见,要是电动机正转,只需依次输出表中各单元的内容即可。
当输出状态已是表底状态时,则修改索引值使下次输出重新为表首状态。
如要使电动机反转,则只需反向依次输出各单元的内容。
步进电机的环形分配器类型_解释说明以及概述
步进电机的环形分配器类型解释说明以及概述1. 引言1.1 概述本文将探讨步进电机中的一种重要组件,即环形分配器类型。
通过解释和说明环形分配器的概念、特点以及工作原理,我们可以深入了解其在步进电机系统中的重要作用。
1.2 文章结构文章将按照以下结构进行叙述:引言、正文、环形分配器类型解释说明、步进电机类型概述和结论。
通过这样的层次结构,读者能够逐步了解步进电机和环形分配器之间的关系,并对它们的特点有一个全面且清晰的认识。
1.3 目的本文旨在介绍并阐明环形分配器类型在步进电机系统中的作用。
通过对环形分配器的原理和特点进行详细讲解,读者可以更好地理解步进电机系统的运行原理,以及为什么环形分配器是必不可少的组成部分。
此外,本文还将探讨不同类型步进电机的特点,并展望未来环形分配器类型和步进电机发展方向。
以上就是“1. 引言”部分内容,请根据需要进行修改和完善。
2. 正文正文部分将详细介绍环形分配器类型以及它与步进电机之间的关系。
本节将涵盖环形分配器类型的工作原理、结构和特点,以及步进电机的基本原理和应用领域。
在此之前,让我们先了解一下什么是环形分配器类型。
环形分配器类型是指一种特殊的外围装置,用于控制步进电机的旋转方向和速度。
它可以根据输入信号来驱动电机按照预定模式旋转。
环形分配器类型通常由一个或多个传感器和相关控制电路组成。
接下来,我们将关注环形分配器类型的主要特点。
首先,它具有高精度和可靠性,能够实现精确的位置控制和旋转角度测量。
其次,环形分配器类型具有快速响应速度和较低的噪音水平,可以满足高性能应用对转动效果的要求。
此外,它还具有较高的承载能力和抗干扰能力,在恶劣环境条件下依然稳定运行。
然后,我们来看一看环形分配器类型的工作原理。
在操作过程中,传感器将检测到输入信号,并将其转换为电信号,然后通过控制电路将指令传递给步进电机。
根据不同的输入信号,环形分配器可以确定旋转方向和速度,并将步进电机驱动到相应位置或以特定步长旋转。
(整理)实用的步进电机驱动电路图.
实用的步进电机驱动电路(图)概述步进电机是一种将电脉冲转化为角位移的执行机构,可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
目前,对步进电机的控制主要有由分散器件组成的环形脉冲分配器、软件环形脉冲分配器、专用集成芯片环形脉冲分配器等。
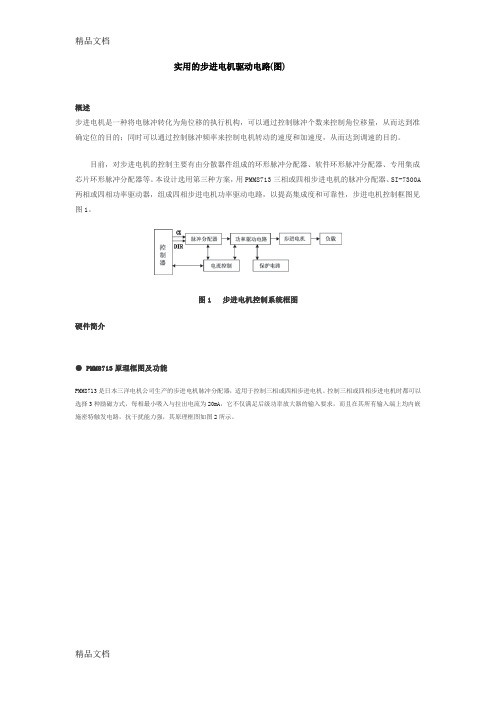
本设计选用第三种方案,用PMM8713三相或四相步进电机的脉冲分配器、SI-7300A 两相或四相功率驱动器,组成四相步进电机功率驱动电路,以提高集成度和可靠性,步进电机控制框图见图1。
图1 步进电机控制系统框图硬件简介● PMM8713原理框图及功能PMM8713是日本三洋电机公司生产的步进电机脉冲分配器,适用于控制三相或四相步进电机。
控制三相或四相步进电机时都可以选择3种励磁方式,每相最小吸入与拉出电流为20mA,它不仅满足后级功率放大器的输入要求,而且在其所有输入端上均内嵌施密特触发电路,抗干扰能力强,其原理框图如图2所示。
图2 PMM8713的原理框图在PMM8713的内部电路中,时钟选通部分用于设定步进电机的正反转脉冲输入发。
PMM8713有两种脉冲输入法:双脉冲输入法和单脉冲输入法。
采用双脉冲输入法时,CP、CU两端分别输入步进电机正反转的控制脉冲。
当采用单脉冲输入时,步进电机的正反转方向由U/D的高、低电位决定。
激励方式控制电路用来选择采用何种励磁方式。
激励方式判断电路用于输出检测;而可逆环形计数器则用于产生步进电机在选定的励磁方式下的各相通断时序信号。
● SI-7300A的结构及功率驱动原理SI-7300A是日本三青公司生产的高性能步进电机集成功率放大器,该器件为单极性四相驱动,采用SIP18封装。
步进电机功率驱动级电路可分为电压和电流两种驱动方式。
电流驱动方式最常用的是PWM恒流斩波驱动电路,也是最常用的高性能驱动方式,其中一相的等效电路图如图3所示。
图3 LM331电压/频率变换电路● LM331芯片LM331是美国国家半导体公司生产的双列直插式8脚芯片,只需接入几个外部元件就可以方便地构成电压/频率(V/F)变换电路,电路如图4所示。
步进电动机伺服系统概述

图6-7 矩角特性
6.2 步 进 电 动 机伺 服系统
图6-8 步进电动机静态矩角特性曲线 图6-9 启动转矩
如图6-8所示,三相步进电动机各相的矩 角特性曲线的相位差为1/3周期,其中曲线 A和曲线B的交点所对应的力矩Tq是电动机 运行状态的最大启动转矩。也就是说,只 有负载转矩TL小于Tq,电动机才能正常启 动运行;否则,容易造成丢步,电动机也 不能正常启动。
(输入信号)
CNl-7 CN1-8
RDY COM
控制回路正常 (输出信号)
输出信号公共点
CNl-9 ZERO
电气循环原点 (输出信号)
单脉冲方式时,正反转方向(DIR DIR )信号
双脉冲方式时,反转脉冲(CCW、CCW )信号
当控制电源、回路正常时,输出低电平信号
RDY、ZERO输出信号的公共点 半步运行时每二十拍送出一电气循环原点 整步运行时每十拍送出一电气循环原点
6.2 步 进 电 动 机伺 服系统
图6-5 步进电动机原示意图
图6-6 三相反应式步进电机工作原理示意图
对每一相绕组通电的操作称为一拍,则A、B、C三相绕组轮流通电需要三
拍,从上面分析可知,电动机转子转动一个齿距需要三拍操作。实际上,电
动机每一拍都转一个角度,也称前进了一步,这个转过的角度称为步距角,
最高工作频率,记为fmax。它是决定定子绕组通电状态最高变化频率的 参数,即决定了步进电动机的最高转速。
6.2 步 进 电 动 机伺 服系统
5.矩频特性 矩频特性T=F(f)所描述的是
步进电动机连续稳定运行时输出 转矩与连续运行频率之间的关系 。如图6-10所示,该特性曲线上 每一频率f所对应的转矩为动态 转矩T。可见,动态转矩的基本 趋势是随连续运行频率的增大而 降低。
《步进电机》PPT课件
➢ 当V相通电,U、W相不通电,如图3.3b所示,2、4齿 与V相对齐;
➢ 当W相通电,U、V相不通电,如图3.3c所示,1、3齿 与W相对齐;
整理ppt
8
整理ppt
9
由此可见,当通电顺序为U→V → W→U →V →…时,转子便顺时针方向一步一步地转动,通 电状态每换接一次,转子前进一步,一步对应的 角度称为步距角。
上述两种通电方式的组合。即通电方式为:U → UV → V → VW→W → WU →U →… 称为三相六拍通电,如图3.4所示。 三相六拍通电方式的步距角减小一倍。
整理ppt
13
3.1.2 小步距角步进电动机
实际的小步距角电动机如图3.5所示。它的定子内 圆和转子外圆上均有齿和槽,而且定子和转子的 齿宽和齿距相等。
第3章 步进电动机传动控制
3.1 步进电动机 3.2 步进电动机的环形分配器 3.3 步进电动机的驱动电路
整理ppt
1
步进电动机是一种将电脉冲信号转换成直线或 角位移的执行元件。步进电动机的运动由一系列电脉 冲控制,脉冲发生器所产生的电脉冲信号,通过环形 分配器按一定的顺序加到电动机的各相绕组上。为了 使电动机能够输出足够的功率,经过环形分配器产生 的脉冲信号还需要进行功率放大。
整理ppt
11
(2)通电方式 双相轮流通电方式
每次有两相绕组通电,通电状态切换时,转子转动平稳, 且输出力矩较大,这种通电方式定位精度高而且不易 失步。
以三相反应式电动机为例,双相轮流通电方式为:UV → VW→WU →UV →… 称为三相双三拍通电。
整理ppt
12
(2)通电方式 单双相轮流通电方式
嵌入式PLD器件在步进电机驱动中的应用

底解 决 了可编 程器 件 的编程 问题 。 用 P D器件 实现 数 字系统 的流程 如 图 1 L 所示 。
… …
H
… … . .
曼 墨………一
耋
・
图 2 步 进 电动 机 系统 结 构 框 图
收 稿 日期 :20 —70 0 80 —8
l5 ・ o
微 电 机
v ne ehdfr co pi igted ̄ M lg at f t tr r eb s gP D T ruhcmp — a cdm to c m l hn i t i p ro e mo i yui L . ho g o a oa s h oc sp o dv n
程逻 辑器 件 可 以 完 全 摆 脱 编 程 器 ,只 需 一 根 简单
的编程 电缆 和一 台 P C就 可 以完 成 器 件 的 编程 ,彻
辑部分 ,根 据所选 用 步进 电动机及 其 驱动 方式 , 按 照相 应 的 励 磁 状 态 转 换 表 规 定 的 状 态 和 顺 序 依 次 对各 相绕 组 电流进 行控 制 … 。
pa t ff n t n lmo u e o rs o u c i a d l fABEL— o HDL we e i r d c d wih e a p e r nto u e t x m l .
Ke o d y W r s: Ph s e u n e ; PL ; I P a es q e c r D S
步 进 电动 机 系统 由步 进 电动 机 本 体 、步 进 电 动机驱 动器 和控 制 器 三 大部 分 构 成 ¨ ,其 系 统框 1 图如 图 2所 示 。其 中环形 分配 器是 驱 动器 的数 字 逻
IP I— s m P orm n ) 术 ,即 “ 系 统 S (ns t rga mig 技 ye 在 可 编程技 术 ” ,是 2 0世 纪 9 0年 代 由美 国 L tc at e公 i
步进电机的单脉冲控制、双脉冲控制、开环控制和闭环控制
步进电机的单脉冲控制、双脉冲控制、开环控制和闭环控制
步进电机是一种感应电机,它的工作原理是利用电子电路,将直流电变成分时供电的,多相时序控制电流,用这种电流为步进电机供电,步进电机才能正常工作,驱动器就是为步进电机分时供电的,多相时序控制器。
虽然步进电机已被广泛地应用,但步进电机并不能像普通的直流电机,交流电机在常规下使用。
它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。
因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。
步进电机作为执行元件,是机电一体化的关键产品之一,广泛应用在各种自动化控制系统中。
随着微电子和计算机技术的发展,步进电机的需求量与日俱增,在各个国民经济领域都有应用。
步进电机的单脉冲控制与双脉冲控制步进电机的控制有单电压和高低电压控制之分;
单电压控制用一串脉冲信号控制一个电子开关的通、断来控制电机驱动绕组得电、失电;高低电压控制在单电压控制的基础上,用另一串脉冲控制一个电子开关的通、半导通,两个开关串联,两个控制脉冲同频率但不同相位和宽度。
达到给绕组的供电电压全、一半、迅速关断的目的。
步进电机的开环控制和闭环控制步进电机的开环控制
1、步进电机开环伺服系统的一般构成
步进电动机的电枢通断电次数和各相通电顺序决定了输出角位移和运动方向,控制脉冲分配频率可实现步进电动机的速度控制。
因此,步进电机控制系统一般采用开环控制方式。
图为开环步进电动机控制系统框图,系统主要由控制器、功率放大器、步进电动机等组成。
2、步进电机的控制器
1、步进电机的硬件控制
步进电动机在个脉冲的作用下,转过一个相应的步距角,因而只要控制一定的脉冲数,即。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
课程数控实验题目基于LPC2114的直流电机控制系统学院信息工程学院专业13计算机测控学号3113002316、3113002317、3113002318、3113002319姓名谢志鹏、杨光、叶国康、曾晖基于LPC2114的步进电机控制器一.实验要求1.用一片LPC2000处理器或单片机设计步进电机驱动器,实现脉冲环形分配器和放大驱动电路功能,驱动步进电机运行。
2.用另外一片LPC2000处理器设计数控系统,设置步进电机步进运动方向选择开关、电位器输入步进运动速度、键盘输入步进运动步数,设置运动脉冲和方向信号输出给步进电机驱动器,实现对步进电机的运动控制信号给定。
二.实验原理1.LPC2103部分(步进电机驱动部分):(1)脉冲输入:利用LPC2103芯片的脉宽调制器(PWM)产生占空比为50%的方波信号。
(2)正反转:把L297的CW/CCW接到LPC2103的一个引脚,通过控制该引脚电平的高低即可实现控制电机正反转。
(3)步进步数控制:把步进电机控制器的定时器0设置成捕获计数模式,当捕获到一个脉冲时,TC 加1,直到TC等于给定步数时,停止方波输出。
2.LPC2114(信号输入部分)(1)步进运动速度输入:通过调节电位器,再经过LPC2114的AD转换,得到电位器触点的电压值。
将电压值按照一定的比例换算成速度值,通过串口发送到LPC2103(步进电机控制器),以改变方波的频率。
(2)步进步数输入:通过键盘输入步进步数,将结果通过串口发送到LPC2103(步进电机控制器)。
三.硬件电路图3.1 电路图L297是步进电机控制器,适用于双极性两相步进电机或单极性四相步进电机的控制,可有半步、整步和波状三种驱动模式。
片内斩波电路允许开关式控制绕组电流。
该器件的一个显著特点是仅需时钟、方向和模式输入信号。
步进电机所需相位由电路内部产生,大大减轻了的负担。
L297的引脚端功能如下:◆引脚端10(使能端EN)为芯片的片选信号,高电平有效;◆引脚端20(复位RST),低电平有效;◆引脚端19(HALF/FULL)和引脚端17(CW/CCW)都通过上拉电阻链接到高电平;◆引脚端18(时钟输入CLK)的最大输入时钟频率不能超过5KHz,控制时钟的频率,即可控制电机转动速率;◆引脚端19(HALF/FULL)决定电机的转动方式,HALF/FULL=0,电机按整步方式运转,HALF/FULL=1,电机按半步方式运转;◆引脚端17(CW/CCW)控制电机转动方向;CW/CCW=1,电机顺时针旋转;CW/CCW=0,电机逆时针旋转。
◆当L297的复位引脚RST输入电平时,L297复位。
具体控制状态如表5.57所示:表3.1 控制电机状态表端口名称光耦输入端L297端口电机响应状态RST 低电平低电平停止高电平高电平启动使能端EN 低电平高电平输入控制信号旋转高电平低电平停止旋转并保持HF/FF 低电平高电平半步工作模式高电平低电平全部工作模式CW/CCW 低电平高电平顺时针旋转高电平低电平逆时针旋转图3.3 采用L297+L298N构成的步进电机驱动电路控制信号CW/CCW经L297处理后,产生的四相A、B、C、D或INH1和INH2输入到L298N进行功率放大,经L298N功率放大后的四相控制信号输出到步进电机,控制步进电机运动。
L298是内含两个桥的高电压大电流双全桥式驱动器,接受标准逻辑电平信号,可驱电压46V、每相2.5A及以下的步进电机。
每个桥都具有一个使能输入端,在不受输入信号影响的情况下允许或禁止器件工作,每个桥的两个桥臂低端三极管的发射极接在一起并引出,用以外接检测电阻。
它设置了一附加电源输入端使逻辑部分在低电压下工作。
使用L298+L297可以做成两相双极性的步进电机驱动电路,它是采用定电流方式驱动,每相电流峰值可达2A,L297是步进电机控制器,用来产生两相双极性驱动信号(A、B、C、D)与电机电流设定,L298是用来驱动步进电机的电力输出,是双全桥接方式驱动,由于采用双极性驱动,因此电机线圈完全利用,使步进电机可以达到最佳的驱动。
四.软件设计1.驱动器部分主要程序#include "lpc2103.h"#include “uart.h”/* 系统设置, Fosc、Fcclk、Fcco、Fpclk必须定义*/#define Fosc 5529600#define Fcclk (Fosc * 6)#define Fcco (Fcclk * 4)#define Fpclk (Fcclk / 4) * 1uint8 speed,step,dir,spee;uint8 Buf[3] = {0}; /* 串口接收数据缓冲区*/void Timer0Init(){T0TCR = 0x02; /* 定时器1 复位*/T0PR = 0; /* 不设时钟分频*/T0CTCR = 0x06; //计数功能T0TCR = 0x01; /* 启动定时器1 */}void PWMInit(void){T1TCR = 0x02; /* 定时器1 复位*/T1PR = 0; /* 不设时钟分频*/T1PWMCON= 0x02; /* 使能MA T1.1 PWM 输出*/T1MCR = 0x02; /* 设置T1MR0 匹配后复位T0TC */T1MR0 = 1500; /* 设置PWM 输出的周期*/T1MR1 = 0; /* 设置PWM1.1 输出占空比为100%*/T1TCR = 0x01; /* 启动定时器1 */}int main (void){IOCLR = 1<<13;PINSEL0 = PINSEL0 & (~0x0F);PINSEL0 = PINSEL0 | 0x05; /* 设置I/O 连接到UART */PINSEL0 = (PINSEL0 & (~(0x03 << 8))) | (0x02 << 8); //设置I/O连接到CAP0.1IODIR |= 1 << 2;IOSET = 1 << 2;PINSEL0 = (PINSEL0 & (~(0x03 << 26)))| (0x02 << 26);/* 选择MA T1.1 输出*/PWMInit(); /* 定时器 1 初始化*/Timer0Init();UARTInit (); /* 串口初始化*/while (1){spee = speed;UART0GetStr(Buf, 3); /* 从串口接收字符串*/DelayNS(10);UART0SendStr(Buf);if( Buf[2]==1 || Buf[2]==0 ){if(spee!=Buf[0]){speed = Buf[0];T1TCR = 0x02; /* 定时器1 复位*/T1MR0 = (256-speed)*3000; /* 设置PWM 输出的周期*/T1MR1 = T1MR0/2; /* 设置PWM1.1 输出占空比为100%*/T1TCR = 0x01; /* 启动定时器1 */}dir = Buf[2];if(dir==1) IOSET = 1<<2;if(dir==0) IOCLR = 1<<2;step = Buf[1];if(Buf[1]!=0) T1TCR = 0x01; /* 启动定时器1 */ }while(1){if(T0TC==step){T1TCR = 0x02; /* 定时器1 复位*/T0TC = 0;break;}}}}2.控制器部分主要代码int main (void){uint8 i,flag;PINSEL2 |= 0; //设置P1 口为GPIOPINSEL0 = (PINSEL0 & (~0x0F)) | 0x05; //设置串口IO0DIR &= 0x7ffff01f; //按键输入IO0DIR |= 0x7ffc20ec; //数码管、IN1、IN2、PWM设置输出IO0CLR = 0x7ff00fe0;IO0SET = 1<<2; //以下两句控制电机正转IO0CLR = 1<<3;EXT0Init();EXT1Init();Index = 0;ADCInit(); //AD 转换初始化IO1DIR |= 0x7ff<<16; 设置1602引脚输出IO1CLR = 0x7ff<<16;InitLcd();DisplayString(0,3,str1);DisplayString(0,10,str2);DisplayString(1,3,str3);DisplayString(1,10,str4);UARTInit();while(1){while(Index == 1) //直到确定键按下后退出{keyscan();InttoChar();DisplayString(0,10,str2);}res = result[2]*100 + result[1]*10 + result[0];step = res;send[1] = step;result[2]=0;result[1]=0;result[0]=0;str4[0]=numcode[ADC_Data/100];str4[1]=numcode[ADC_Data%100/10];str4[2]=numcode[ADC_Data%10];DisplayString(1,10,str4);if( (send[0]!=sen[0]) || (send[1]!=0) || send[2]!=sen[2]) flag=1;if(flag==1){UART0SendStr(send);sen[2] = send[2];sen[1] = send[1];sen[0] = send[0];send[1] =0;flag = 0;}}}五.实验总结:实验基本完成,但仍然存在以下不足和有待改进之处:1.串口发送接收有时会出错;2.代码冗长,部分功能实现比较复杂。
总的来说,在这次实验确实收获了不少知识和经验。