运放稳定性1-环路稳定性基础
电压反馈运算放大器的稳定性分析及补偿技术
电压反馈运算放大器的稳定性分析及补偿技术1,介绍:电压反馈放大器(VFA)已经有60年的历史,但从第一天起,对电路的设计仍存在问题。
反馈系统是易变的和精密的,但总有不稳定的趋势。
运算放大器电路结构使用了一个高增益放大器,它的参数取决于外部的反馈元件,如果没有反馈元件,放大器的增益非常高。
最轻微的输入信号都会使输出饱合。
运放是一个通用元件,所以这个结构的研究要很细致,但结果在很多电压反馈电路中都是可用的。
电流反馈放大器(CFA)很象电压反馈放大器(VFA),但其间的差异很重要,在隔离反馈系统中应用时要确保CFA在掌控之中。
稳定性作为电子电路中的术语,常定义为实现无振荡状态,这是一个不准确不恰当的定义词汇。
稳定性是个相对概念,而其饱合使人们不易处理,因为相对地评判已经用尽,它很容易在一个电路之间画一条线,是振荡还是不振荡。
所以我们能了解为什么一些人相信振荡是稳定和不稳定之间的一条边界线。
反馈电路展示出一个拙劣的相位响应,过冲及振荡之前的振铃。
这些现象在电路设计时都要考虑到,而且是不希望有的。
本文不去涉及振荡器,于是相对的稳定性定义为一项性能。
根据此定义,当设计师决定在可接受的相对稳定的电路中有些折衷,相对的稳定性的测量是阻尼的比例(ζ)阻尼比的细节讨论见参考文件1。
阻尼比相对于相位移动是另一个稳定性的测量标准。
多数稳定电路都有较长的响应时间,低的带宽,高的精度及少的过冲。
欠稳定的电路有最快的响应时间,最高的带宽,低的精度及一些过冲。
放大器由有源元件诸如晶体管一类组成。
合适的晶体管参数象晶体管增益,提供一个漂移及初始的来自各方的非精密度。
所以放大器由这些元件组合时就存在了漂移和非精密状态。
而漂移和非精准要用负反馈来消除。
运放电路结构采用反馈系统使电路的传输函数与放大器特性无关。
做到了这一点,电路的传输函数就只取决于外部元件。
外部的无源元件几乎可以满足漂移和精度的规范,仅有成本和几何尺寸限制这些无源元件的使用。
运放稳定性分析环路稳定性基础

运放稳定性分析环路稳定性基础引言本系列所采用的所有技术都将“以实例来定义”,而不管它在其他应用中能否用普通公式来表达。
为便于进行稳定性分析,我们在工具箱中使用了多种工具,包括数据资料信息、技巧、经验、SPICE仿真以及真实世界测试等,都将用来加快我们的稳定运放电路设计。
尽管很多技术都适用于电压反馈运放,但上述这些工具尤其适用于统一增益带宽小于20MHz的电压反馈运放。
选择增益带宽小于20MHz的原因是,随着运放带宽的增加,电路中的其他一些主要因素会形成回路,如印制板(PCB) 上的寄生电容、电容中的寄生电感以及电阻中的寄生电容与电感等。
我们下面介绍的大多数经验与技术并非仅仅是理论上的,而且是从利用增益带宽小于20MHz的运放、实际设计并构建真实世界电路中得来的。
本系列的第1部分回顾了进行稳定性分析所需的一些基本知识,并定义了将在整个系列中使用的一些术语。
波特图(曲线)基础幅度曲线的频率响应是电压增益改变与频率改变的关系。
这种关系可用波特图上一条以分贝(dB) 来表示的电压增益比频率(Hz) 曲线来描述。
波特幅度图被绘成一种半对数曲线:x轴为采用对数刻度的频率(Hz)、y轴则为采用线性刻度的电压增益(dB) ,y轴最好是采用方便的每主格45°刻度。
波特图的另一半则是相位曲线(相移比频率),并被描绘成以“度”来表示的相移比频率关系。
波特相位曲线亦被绘成一种半对数曲线:x轴为采用对数刻度的频率(Hz)、y轴为采用线性刻度的相移(度),y轴最好是采用方便的每主格45°刻度。
幅度波特图要求将电压增益转换成分贝(dB) 。
进行增益分析时,我们将采用以dB(定义为20Log10A)表示的电压增益,其中A为以伏/伏表示的电压增益。
在电压增益波特图上,增益随频率变化的斜线可定义成按+20dB/decade或-20dB/decade增加或减小。
另一种描述同样斜线的方法是按+6dB/octave 或-6dB/octave增加或减小(参见图1.4)以下推导证明了20dB/decade与6dB/octave的等效性:?A(dB) = A(dB) at fb – A(dB) at fa?A(dB) = [Aol(dB) - 20log10(fb/f1)] – [Aol(dB) - 20log10(fa/f1)]?A(dB) = Aol(dB) - 20log10(fb/f1) – Aol(dB) + 20log10(fa/f1)]?A(dB) = 20log10(fa/f1) – 20Log10(fb/f1)]?A(dB) = 20log10(fa/fb)?A(dB) = 20log10(1k/10k) = -20dB/decade?A(dB) = 20log10(fb/fc)?A(dB) = 20log10(10k/20k) = -6db/octave-20dB/decade = -6dB/octave因此:+20dB/decade = +6dB/octave -20dB/decade = -6dB/octave+40dB/decade = +12dB/octave -40dB/decade = -12dB/octave+60dB/decade = +18dB/Octave -60dB/decade = -18dB/Octave极点à单个极点响应在波特图(幅度或增益曲线)上具有按-20dB/decade 或-6db/octave斜率下降的特点。
典型的两级运放环路稳定性分析
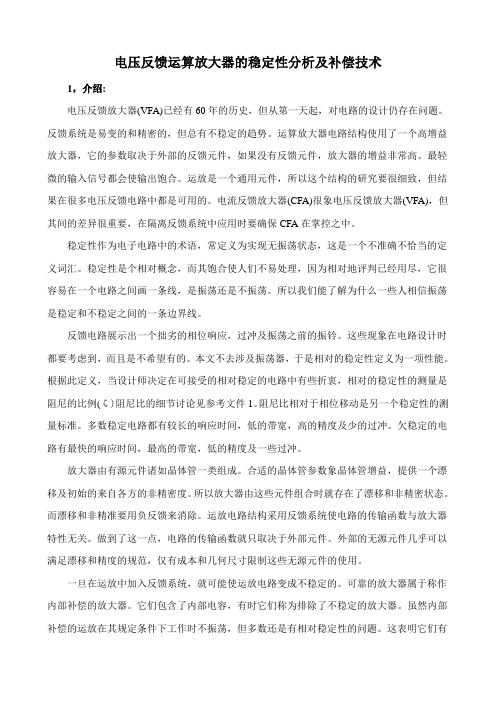
典型的两级运算放大器环路稳定性分析典型的两级运放如图所示,负载电容CL=50fF。
首先建立静态工作点。
加偏置电流I0=4uA,加共模输入电平1.25V。
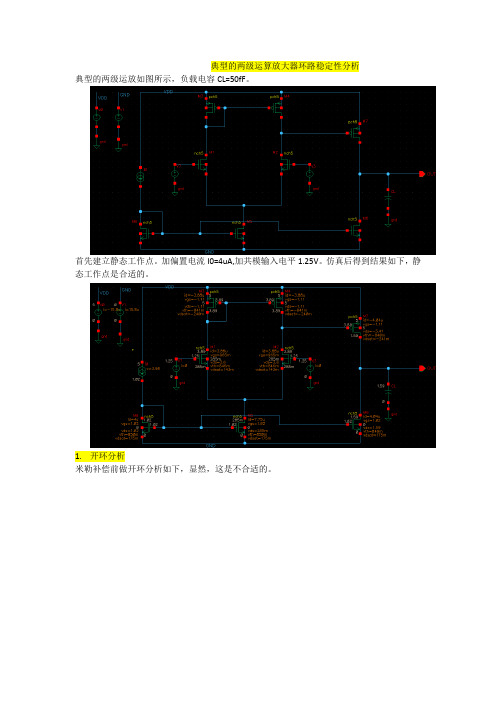
仿真后得到结果如下,静态工作点是合适的。
1.开环分析米勒补偿前做开环分析如下,显然,这是不合适的。
加米勒补偿电容Cc=200fF,做开环分析如下,显然,这也是不合适的。
这是由于电路中存在零点造成的。
加入调零电阻Rz=40K,,仿真结果如下。
可以看出,,,相位裕度为40度,不够。
可通过加大补偿电容来进一步分裂p1,p2主次极点。
(已尝试过加米勒补偿电容Cc=300fF可以得到大于60度的相位裕度)。
但是本次设计的运放用在负反馈环路中,故只需要负反馈环路是稳定的就达到设计标准。
理论计算。
查看各管子的静态工作点。
,,,即。
,,,即。
,。
理论值与仿真结果非常接近。
,理论值与仿真结果非常接近。
,,理论值与仿真结果非常接近。
,,理论值与仿真结果40度偏差较大。
2.在负反馈环路中做环路稳定性分析:从上图可以看出,加入反馈电阻网络R1,R2后就打破了原有的静态工作点:主要是反馈电阻网络R1,R2中的电流由M7管提供,所以M7管的静态工作点打破了,即运放的第二级跨导GmⅡ,输出电阻R2都变了。
从波特图中可以看出相位裕度为77度,满足设计标准。
理论计算:查看各管子的静态工作点。
,,,即。
,,,即。
,。
理论值与仿真结果非常接近。
,理论值与仿真结果非常接近。
,理论值与仿真结果非常接近。
,,理论值与仿真结果77度偏差较大。
此结果可能是由于gm7变大,原来的调零电阻RZ过大造成的。
现在改变调零电阻Rz=25K,,仿真结果如下:此时,相位裕度为63度,满足设计标准。
3.改用大电感大电容仿真环路增益:仿真方法如上图所示,将环路断开,加入大电感L0=1GH通直流以建立直流工作点,并且断开交流通路,加入大电容C3=1GF通交流小信号V8。
从仿真结果图中可以看出相位裕度为70度。
不同的仿真方式所得到的结果略有误差。
环路稳定性分析

图3.3 调节器电路
调节器的输入信号即为与参考电压相比较的误差放大器的输出信号。 调节器的输出即为PHASE节点,调节器的增益可以简便地看成是入 电压 VIN 与IC 内部集成振荡器的峰峰值电压 DVOSC 的比值。 即为:
GAIN Modulator =
(2) 输出滤波器
VIN DVOSC
传递函数为:
H comp
1 ) R2 gC 2 1 = g R1 gC1 s g( s + C1 + C 2 ) R 2 gC1 gC 2 (s +
图3.9 TypeⅡ型补偿网络幅频及相频图
TypeⅡ型闭环系统结构图如下图所示:
图3.10 TypeⅡ型闭环系统结构图 系统传递函数为:
1 ) V 1 + s gESR gCOUT 1 R2 gC2 H= g g IN g R1 gC1 s g( s + C1 + C2 ) DVOSC 1 + s g( ESR + DCR )gCOUT + s 2 gLOUT gCOUT R2 gC1 gC2 (s +
X2(s) 为控制
开环控制的传递函数为:
X 2 ( s) G1 ( s ) = X 1 ( s)
两个环节串联:
图1.2 两环节控制模型
可以得出:
X 2 (s) G1 ( s ) = X1 (s)
X 3 (s) G2 ( s ) = X 2 (s)
X3 (s) X2 (s) X3 (s) G(s) = = g = G1(s)g 2 (s) G X1(s) X1(s) X2 (s)
系统波特效果图:
图3.11 系统波特效果图
2)TypeⅢ 型结构如图所示
环路稳定性评价规范
6环路稳定性评价方法...............................................................................................................................................3
在实际测试过程中应注意的环节是注入电阻的位置,以及阻值大小。为了减小测量误差,实测一般选取10~100Ω的电阻;干扰信号的大小一般要求其幅度不能超过输出电压的5%,否则测出来的结果是不准确的。
图2环路稳定性测试接线图
6.3环路稳定性评价指标判定
表1(环路稳定性评价指标)给出了相位裕度和增益裕度的数值变化与环路稳定性的关系。
5.4穿越频率............................................................................................................................................................ 2
5.2增益裕度(GainMargin):又称增益容限,是指当开关电源的输出随着负载特性的改变而控制环路所对应频率点的相位为0deg时的增益量。
5.3相位裕度(PhaseMargin):又称相位容限,是指当开关电源的输出随着负载特性的改变而控制环路的增益量下降到0dB时所对应频率点的相位。(实际是衰减)。
运算放大器稳定性及频率补偿学习报告

信息科学与技术学院模拟CMOS集成电路设计——稳定性与频率补偿学习报告姓名:学号:二零一零年十二月稳定性及频率补偿2010-12-3一、自激振荡产生原因及条件1、自激振荡产生原因及条件考虑图1所示的负反馈系统,其中β为反馈网络的反馈系数,并假定β是一个与频率无关的常数,即反馈网络由纯电阻构成,不产生额外的相移(0βϕ= );H (s )为开环增益,则()H s β为环路增益。
所以,该系统输入输出之间的相移主要由基本放大电路产生。
图1 基本负反馈系统 该系统的闭环传输函数(即系统增益)可写为:()()1()Y H s s X H s β=+ 由上式可知,若系统增益分母1()H s j βω==-1,则系统增益趋近于∞,电路可以放大自身的噪声直到产生自激振荡,即:如果1()H j βω=-1,则该电路可以在频率1ω产生自激振荡现象。
则自激振荡条件可表示为:1|()|1H j βω=1()180H j βω∠=-注意到,在1ω时环绕这个环路的总相移是360 ,因为负反馈本身产生了180 的相移,这360 的相移对于振荡是必需的,因为反馈信号必须同相地加到原噪声信号上才能产生振荡。
为使振荡幅值能增大,要求环路增益等于或者大于1。
所以,负反馈系统在1ω产生自激振荡的条件为:(1)在该频率下,围绕环路的相移能大到使负反馈变为正反馈;(2)环路增益足以使信号建立。
2、重要工具波特图判断系统是否稳定的重要工具是波特图。
波特图根据零点和极点的大小表示一个复变函数的幅值和相位的渐进特性。
波特图的画法:(1)幅频曲线中,每经过一个极点P ω(零点Z ω),曲线斜率以-20dB/dec(+20dB/dec)变化;(2)相频曲线中,相位在0.1P ω(0.1Z ω)处开始变化,每经过一个极点P ω(零点Z ω),相位变化-45 (±45 ),相位在10P ω(10Z ω)处变化-90 (±90 );(3)一般来讲,极点(零点)对相位的影响比对幅频的影响要大一些。
环路稳定

1、先去把自控原理(经典部分)看一遍,搞懂零,极点的概念,因为电源在小信号的情况下就是一个很典型的小相角系统,什么叫看懂,那到一个电源,一看反馈部分马上零,极点就可以写出来.而PWM部分和滤波部分对固定的电路拓扑和控制形式(电压或电流),其零,极点都有响应的公式写出.如果你要详细的数学计算,再去看自控的超前,滞后补偿部分,但这种计算来的一般不会太准,但可以作为一个调试的起点,最后的检测一般用电子负载做动态加减载实验就可以(专用仪器非常贵).一般的电源设电流变化率为1A/uS或5,10A/uS.50-100%负载变化,看电压变化,如果电压很缓慢的回到稳态值,说明相角裕度太大,如果震荡2个周期以上回到稳态值,相角裕度一般只有二,三十度,太小,如果一个周期左右,则相角裕度一般为50-60度,正好.当然如果电源本身就震荡,则震荡的频率就是你的环路的交越频率,既带宽,说明在此频率处相位移已经到了360度,解决的方法要么减小带宽:加大补偿的电容值,或加大反馈分压的电阻值,当你改变这些值不起作用时,要看环路的其他方面,既加零点,如TL431做反馈,当补偿电容加的很大还不行时,其实应该在其与光偶串联的支路加补偿(RC),这样增加了一个低频零点和一个高频极点,高频极点由于频率很高,不在环路带宽以内,对环路没有影响.
2、空载切换到满载时,输出电压经过7个周期的小幅震荡,才趋于稳定,7个开关周期?很可能是某个频段的调制量不够,提高一点误差放大器的中频增益。也可以理解为穿越频率太低,稳定性很好但响应时间太长。我不会复杂计算和仿真,定性分析的话应该减小负反馈的电容(如果你是用的二类频是只要很明确的知道零,极点的概念,环路问题实际上很简单(当然,要正确的应用到电源里面来是花很多时间的,由于没有老师,我研究了近一年),也可以用相关软件来模拟,但并非易事,因为模型很难准确的建立,举个例子,如电压型控制的反击(CCM工作方式),如果TL431只加一个补偿电容,用PSPICE模拟的结果基本上是不稳定的,但实际中大部分电源是稳定的,怎么解释,原因是输出滤波部分实际上并不是一个严格的二阶系统,由于绕组电阻,高频阻抗,二极管电阻,电容电阻,特别是次级损耗要等效为一个较大的电阻,这样两个极点并不会重合(二阶系统),它变成了两个不同频率的一阶系统的串联,所以它的相位移变化并不剧烈,加上其他零点的影响,相位并不会到360度,这是用PSIPCE模拟时要人为给二极管或电容加一个很大的电阻,如1欧姆,才会得出正确的结果.随便聊几句,希望对大家有帮助
--放大器的精度和稳定性
--放大器的精度和稳定性电路结构建议采用典型电路形式和厂商提供的电路,许多电路结构都是经过很多工程师们反复实验和验证过的。
采用OP构成的放大器电路的精度主要与外部元器件参数有关,例如放大倍数与外接的电阻有关。
解决放大器的稳定性就比较复杂了,涉及到放大器的电路结构、PCB布局、电源供给、以及放大器所在的系统环境等等、等等。
一些建议如下:与分立器件相比,现代集成运算放大器(op amp)和仪表放大器(in-amp)为设计工程师带来了许多好处。
虽然提供了许多巧妙、有用并且吸引人的电路。
往往都是这样,由于仓促地组装电路而会忽视了一些非常基本的问题,从而导致电路不能实现预期功能——或者可能根本不工作放大器电路设计:如何避免常见问题。
(1)最常遇到的一个应用问题是在交流(AC)耦合运算放大器或仪表放大器电路中没有提供偏置电流的直流(DC)回路。
在图1中,一只电容器与运算放大器的同相输入端串联以实现AC耦合,这是一种隔离输入电压(VIN)的DC分量的简单方法。
这在高增益应用中尤其有用,在那些应用中哪怕运算放大器输入端很小的直流电压都会限制动态范围,甚至导致输出饱和。
然而,在高阻抗输入端加电容耦合,而不为同相输入端的电流提供DC通路,会出现问题。
图1 运算放大器AC耦合输入错误的连接形式(2)在仪表放大器的输出端和ADC的输入端之间通常接一个简单的RC低通抗混叠滤波器以减少带外噪声。
RC低通滤波器的典型值:R = 50Ω~ 200Ω, C = 1/(2πR F),按电路的-3 dB带宽设置C的取值。
(3)当从电源电压利用分压器为放大器提供参考电压时应保证PSR性能一个经常忽视的问题是电源电压VS的任何噪声、瞬变或漂移都会通过参考输入按照分压比经过衰减后直接加在输出端。
实际的解决方案包括旁路滤波以及甚至使用精密参考电压IC 产生的参考电压,例如ADR121,代替Vs分压。
当设计带有仪表放大器和运算放大器的电路时,这方面的考虑很重要。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
运放稳定性第1部分(共15部分):环路稳定性基础作者:Tim Green ,TI 公司Burr-Brown 产品战略发展经理1.0 引言本系列所采用的所有技术都将“以实例来定义”,而不管它在其他应用中能否用普通公式来表达。
为便于进行稳定性分析,我们在工具箱中使用了多种工具,包括数据资料信息、技巧、经验、SPICE 仿真以及真实世界测试等,都将用来加快我们的稳定运放电路设计。
尽管很多技术都适用于电压反馈运放,但上述这些工具尤其适用于统一增益带宽小于20MHz 的电压反馈运放。
选择增益带宽小于20MHz 的原因是,随着运放带宽的增加,电路中的其他一些主要因素会形成回路,如印制板 (PCB) 上的寄生电容、电容中的寄生电感以及电阻中的寄生电容与电感等。
我们下面介绍的大多数经验与技术并非仅仅是理论上的,而且是从利用增益带宽小于20MHz 的运放、实际设计并构建真实世界电路中得来的。
本系列的第1部分回顾了进行稳定性分析所需的一些基本知识,并定义了将在整个系列中使用的一些术语。
9Data Sheet Info 9Tricks 9Rules-Of-Thumb 9Tina SPICE Simulation9TestingGoal:EASILY Tricks & Rules-Of-Thumb apply for Voltage FeedbackOp Amps, Unity Gain Bandwidth <20MHzTo learn how to analyze and design Op Amp circuits for guaranteed Loop Stability using Data Sheet Info, Tricks, Rules-Of-Thumb, Tina SPICE Simulation, and Testing.Note:图1.0 稳定性分析工具箱图字(上、下):数据资料信息、技巧、经验、Tina SPICE 仿真、测试;目的:学习如何用数据资料信息、技巧、经验法则、Tina SPICE 仿真及测试来“更容易地”分析和设计运放,以确保环路稳定性;注:用于统一增益带宽小于20MHz 的电压反馈运放的技巧与经验法则。
1.1 波特图(曲线)基础幅度曲线的频率响应是电压增益改变与频率改变的关系。
这种关系可用波特图上一条以分贝 (dB) 来表示的电压增益比频率 (Hz) 曲线来描述。
波特幅度图被绘成一种半对数曲线:x 轴为采用对数刻度的频率 (Hz)、y 轴则为采用线性刻度的电压增益 (dB) ,y 轴最好是采用方便的每主格45°刻度。
波特图的另一半则是相位曲线(相移比频率),并被描绘成以“度”来表示的相移比频率关系。
波特相位曲线亦被绘成一种半对数曲线:x 轴为采用对数刻度的频率 (Hz)、y 轴为采用线性刻度的相移(度),y 轴最好是采用方便的每主格45°刻度。
2040608010010M1M100k10k1k100101Frequency (Hz)A (dB )Aol Curve+90-90+45+-45101001k10k100k1M10MFrequency (Hz)图 1.1 幅度与相位波特曲线(图)图字(上、下):Aol 曲线、幅度曲线、频率、相位曲线。
幅度波特图要求将电压增益转换成分贝 (dB) 。
进行增益分析时,我们将采用以dB (定义为20Log 10A )表示的电压增益,其中A 为以伏/伏表示的电压增益。
图1.2 幅度波特曲线分贝(dB) 定义θ(d e g r e e s )Magnitude PlotPhase PlotA A = Voltage Gain in V/V dB ÆA(dB)=20Log 10where 01201040100601,0008010,000100100,0001201,000,00014010,000,000-200.1-400.01-600.001 A (dB)A (V/V)图1.3定义一些常用的波特图术语:•Roll-Off Rate •Decade Æ•Octave Æ ÆDecrease in gain withfrequencyx10 increase or x1/10 decrease in frequency. From 10Hz to 100Hz is one decade.X2 increase or x1/2 decrease in frequency. From 10Hz to 20Hz is one octave.图1.3 更多波特曲线定义图字(上、下):roll-off rate (下降速率)——增益随频率减小;decade (十倍频程)——频率按x10增加或按x1/10减小,从10Hz 到100 Hz 为一个decade (十倍频程);octave (倍频程)——频率按x2增加或按x1/2减小,从10Hz 到20 Hz 为一个octave (倍频程);在电压增益波特图上,增益随频率变化的斜线可定义成按 +20dB/decade 或-20dB/decade 增加或减小。
另一种描述同样斜线的方法是按 +6dB/octave 或 -6dB/octave 增加或减小(参见图1.4)以下推导证明了20dB/decade 与 6dB/octave 的等效性:∆A(dB) = A(dB) at fb – A(dB) at fa∆A(dB) = [Aol(dB) - 20log10(fb/f1)] – [Aol(dB) - 20log10(fa/f1)] ∆A(dB) = Aol(dB) - 20log10(fb/f1) – Aol(dB) + 20log10(fa/f1)] ∆A(dB) = 20log10(fa/f1) – 20Log10(fb/f1)] ∆A(dB) = 20log10(fa/fb)∆A(dB) = 20log10(1k/10k) = -20dB/decade∆A(dB) = 20log10(fb/fc)∆A(dB) = 20log10(10k/20k) = -6db/octave-20dB/decade = -6dB/octave因此:+20dB/decade = +6dB/octave -20dB/decade = -6dB/octave +40dB/decade = +12dB/octave -40dB/decade = -12dB/octave +60dB/decade = +18dB/Octave -60dB/decade = -18dB/Octave 02040608010010M1M 100k 10k 1k 100101Frequency (Hz)20k 54B )A (d图1.4 幅度波特图:20dB/decade = 6dB/octave极点Æ 单个极点响应在波特图(幅度或增益曲线)上具有按 -20dB/decade 或 -6db/octave 斜率下降的特点。
在极点位置,增益为直流增益减去3dB 。
在相位曲线上,极点在频率f P 上具有-45°的相移。
相位在f P 的两边以 -45°/decade 的斜率变化为0°和 -90°。
单极点可用图1.5中的简单RC 低通网络来表示。
请注意极点相位是如何影响直到高于(或低于)极点频率10倍频程处的频率的。
V IN OU TA = V OU T /V IN Single Pole Circuit Equivalent +90-90+45+-45Frequency(Hz)0θ(d e g r e e s )020406080100A (d B )¾Pole Location ¾Magnitude ¾Phase = f P = -20dB/Decade Slope Slope begins at f P and continues down as frequency increases Actual Function = -3dB down @ f P= -45°/Decade Slope through f P Decade Above f P Phase = -90° Decade Below f P Phase = 0°图1.5 极点:波特曲线幅度与相位图字:实际函数、直线近似、频率;单极点电路等效电路图 极点位置= f p幅度= -20dB/decade 斜线- 斜线从f P 处开始、并继续随频率增加而下降 - 实际函数= -3dB down @ f p 相位= -45°/decade 斜率通过f p- f p 以上10倍频程处相位= -90° - f p 以下10倍频程处相位= 0°零点Æ 单个零点响应在波特图(幅度或增益曲线)上具有按 +20dB/decade 或+6db/octave 斜率上升(对应于下降)的特点。
在零点位置,增益为直流增益加3dB 。
在相位曲线上,零点在其频率f z 上具有+45°的相移。
相位在f z 的两边以+45°/decade 斜率变化为0°与+90°。
单零点可用图1.6中的简单RC 高通网络来表示。
请注意零点相位是如何影响直到高于(或低于)零点频率10倍频程处的频率的。
+90-90+45+-45Frequency (Hz)θ(d e g r e e s )20406080100A (dB )¾Zero Location ¾Magnitude ¾Phase = f Z= +20dB/Decade Slope Slope begins at f Z and continues up as frequency increasesActual Function = +3dB up @ f Z = +45°/Decade Slope through f Z Decade Above f Z Phase = +90°Decade Below f Z Phase = 0°图1.6 零点:波特曲线幅度与相位图字:实际函数、直线近似、频率;单零点电路等效电路图 零点位置= f z幅度= +20dB/decade 斜线- 斜线从f z 开始、并继续随频率增加而上升 - 实际函数= -3dB up @ f z 相位= +45°/decade 斜率通过f z- f z 以上10倍频程处相位=+90° - f z 以下10倍频程处相位= 0°在波特幅度图上,很容易测量给定极点或零点的频率。