履带车辆非线性悬挂系统的ADAMS仿真
基于ADAMS的汽车前悬挂装置仿真分析
基于ADAMS的汽车前悬挂装置仿真分析基于ADAMS的汽车前悬挂装置仿真分析摘要:汽车悬挂系统是汽车行驶过程中非常重要的组成部分,对汽车的操控、乘坐舒适性以及行驶稳定性都有着重要影响。
本文利用ADAMS软件对汽车前悬挂装置进行了仿真分析,旨在探究不同悬挂参数对汽车性能的影响,并优化悬挂系统设计方案。
1. 引言汽车前悬挂装置是连接车辆车身和路面的一个重要部件,主要作用是吸收道路不平造成的冲击,保证车辆行驶过程中的平稳性和舒适性。
对前悬挂装置进行仿真分析有助于提高悬挂系统设计的准确性和可靠性。
2. ADAMS软件介绍ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是一款基于多体动力学原理的仿真软件,具有广泛的应用领域。
它可以模拟机械系统的运动、力学特性以及系统之间的相互作用,并提供了丰富的分析工具和优化算法。
3. 汽车前悬挂系统模型建立本实验选取了一款某汽车的前悬挂系统进行仿真分析。
首先,通过测量实际车辆的尺寸参数和悬挂装置的特征参数,建立了汽车前悬挂系统的三维模型。
然后,将该模型导入到ADAMS软件中,并设置初始条件和约束条件。
4. 悬挂系统刚度参数仿真在初始模型的基础上,通过调整悬挂系统的刚度参数,分别进行了横向、纵向和侧向的仿真分析。
结果显示,随着悬挂系统刚度的增加,车辆在行驶过程中的横向加速度和纵向加速度均呈现减小的趋势,而侧倾角则呈现增加的趋势。
5. 悬挂系统阻尼参数仿真在初始模型的基础上,通过调整悬挂系统的阻尼参数,分别进行了横向、纵向和侧向的仿真分析。
结果显示,随着悬挂系统阻尼的增加,车辆在行驶过程中的振动幅度逐渐减小,乘坐舒适性得到了提升。
6. 优化设计方案结合前面的仿真分析结果,综合考虑悬挂系统刚度和阻尼参数的影响,提出了一种优化的悬挂系统设计方案。
该方案在保证行驶稳定性和乘坐舒适性的基础上,能够最大限度地减小车辆在行驶过程中的横向加速度和纵向加速度,从而提升车辆的整体性能。
基于ADAMS的汽车悬架系统结构优化仿真
1 建立悬架 多体动力学模型
11 建 立硬点 .
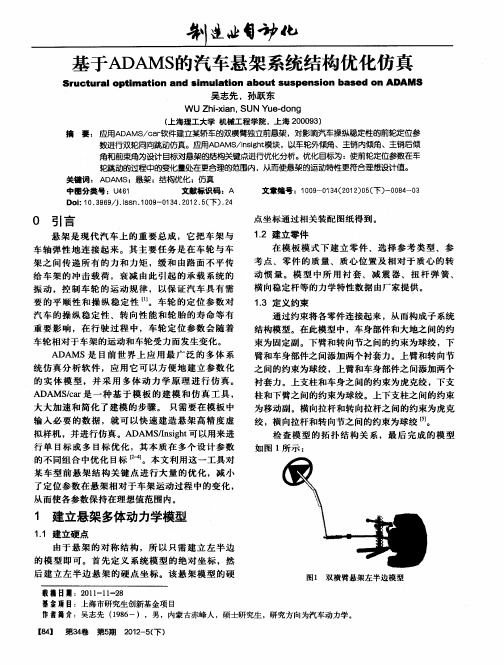
由于 悬 架 的对 称 结 构 ,所 以 只需 建 立 左 半 边 的 模 型 即 可 。 首 先 定 义 系统 模 型 的 绝 对 坐 标 ,然 后 建 立 左 半 边 悬 架 的硬 点 坐 标 。该 悬架 模 型 的硬
收稿 日捆:2 1 -1- 8 0 1 1 2 图1 双横臂悬架左半边模型
车 轴 弹 性 地 连 接 起 来 。其 主 要 任 务 是在 车 轮 与 车
架 之 间传 递 所 有 的 力 和 力 矩 ,缓 和 由路 面 不 平 传
给 车 架 的冲 击 载 荷 ,衰 减 由此 引 起 的 承载 系统 的 振 动 ,控 制 车 轮 的 运 动 规 律 ,以保 证 汽 车 具 有 需 要 的平 顺性 和 操 纵 稳 定 性 u。车 轮 的 定位 参 数 对 】 汽 车 的操 纵 稳 定 性 、转 向性 能 和 轮 胎 的 寿命 等 有
行 单 目标 或 多 目标 优 化 ,其 本 质 在 多个 设 计 参 数 的 不 同组 合 中优 化 目标 。本文 利 用这 一 工具 对 某 车 型 前 悬 架 结 构 关 键 点 进 行 大 量 的 优 化 ,减 小
了定 位 参 数在 悬 架 相对 于 车 架运 动过 程 中的变 化 , 从 而 使 各参数 保 持在理 想 值范 围 内。
( 上海理工大学 机械 工程 学院 ,上海 2 0 9 ) 0 0 3
Hale Waihona Puke 摘要 : 应用A A / a 软件建立某轿车的双横臂独立前悬架 ,对影响汽车操纵稳定 性的前轮定位参 D MS c r 数进行双轮同向跳动仿真。应用A A s I I t D M /n g 模块 ,以车轮外倾角 、主销 内倾角 、主销后倾 sh 角和前束角为设计目标 对悬架的结构关键点进行优化分 析。优化 目标为 :使前轮定位参数在车 合理 的范 围内 ,从而使悬架的运动特性更符合 理想设计值 。
基于SolidWorksADAMS的汽车悬架设计与仿真分析

基于SolidWorks/ADAMS 的汽车悬架设计与仿真分析汽车悬架的主要功能是传递车轮和车身之间的力和力矩,缓冲汽车车身的冲击载荷,从而保证车轮具有较强的抗震动性能、满足力与力矩分布均匀、转向受力充分的特性,因此,合理设计汽车悬架的元件,尽可能降低系统间潜在的冲突和干涉对于改善车辆的安全性能和舒适性能具有十分重要的意义[1-3]。
本文利用SolidWorks 软件建立汽车悬架的三维模型,而后导入ADAMS 软件中进行运动仿真分析,仿真结果可为汽车悬架的优化设计提供可靠的依据。
1基于SolidWorks 的汽车悬架三维建模汽车悬架的三维建模包括部件的建模和整体装配。
利用SolidWorks 软件构造出各部分典型零件的三维模型,然后进行产品的整体装配,使操作过程更为灵活。
非独立悬挂的车轮装在整体车轴的两端,当一边车轮跳动时,另一侧车轮也相应跳动,使整个车身振动或倾斜。
独立悬挂的车轴则分成两段,每只车轮由螺旋弹簧独立安装在车架下面,两边车轮可以独立运动,提高了汽车的平稳性、舒适性和操控性[4-6]。
经过核算,得到满足设计要求的汽车悬架总装配图(见图1)。
2基于ADAMS 的汽车悬架系统仿真分析将SolidWorks 中创建好的汽车悬架三维模型以parasolid (*.x_t )格式导入到ADAMS 中,进行运动仿真分析。
汽车悬架仿真分析参数设置见图2。
2.1前轮主销后倾角变化特性分析在汽车侧面,主轴的位置稍微向后倾斜。
主轴的后倾角不仅可以提高汽车直线行驶时的稳定性,而且还可以使前轮在旋转后自动变正[7]。
车轮转动时主销位于车内,由于离心力的作用,前轮侧反作用力位于主销后,因此主销反作用力使车轮趋于自文章编号:1674-9146(2020)05-052-02蒋尊义,唐笑影,杜天德,刘畅,胡辰收稿日期:2020-03-03;修回日期:2020-04-04作者简介:蒋尊义(1998-),男,江苏徐州人,在读大专,主要从事机械设计与制造研究,E-mail :183****************。
基于ADAMS-Car的悬架系统对操纵稳定性影响的仿真试验研究共3篇

基于ADAMS-Car的悬架系统对操纵稳定性影响的仿真试验研究共3篇基于ADAMS/Car的悬架系统对操纵稳定性影响的仿真试验研究1随着现代汽车技术的日新月异,悬架系统作为整车动力系统的重要组成部分,越来越受到了汽车制造商和消费者的关注。
悬架系统不仅影响着汽车的行驶舒适性和稳定性,还直接影响着汽车的操纵性能。
因此,对悬架系统的研究和探讨变得异常重要。
本文基于ADAMS/Car软件平台对悬架系统对操纵稳定性的影响进行了仿真试验研究。
首先,通过对悬架系统的结构和工作原理进行分析,构建了悬架系统的计算模型。
然后,设定了不同路面条件下的仿真试验方案,对悬架系统在不同路面情况下的操纵稳定性表现进行了仿真分析。
最后,通过对仿真结果进行深入分析,总结出了悬架系统对操纵稳定性影响的规律和相关因素。
首先,本文从悬架系统的结构和工作原理入手,对悬架系统的重要组成部分进行了介绍和分析。
悬架系统由弹簧、减震器、连杆等组件组成,其中弹簧具有缓冲起伏的作用,减震器则能为车辆提供稳定的支撑力,使车辆行驶更稳定。
在分析悬架系统工作原理的基础上,本文建立了悬架系统的计算模型。
其次,本文设定了不同路面条件下的仿真试验方案。
通过ADAMS/Car软件平台,设置了标准路面、凸凹路面和颠簸路面三种不同路面条件下的仿真试验方案,并分别对其进行仿真分析。
在仿真试验过程中,本文重点观察了车辆加速、刹车和转向等操作时的操纵稳定性表现,并对仿真数据及车辆动态图像进行了记录和分析。
最后,本文通过对仿真结果进行深入分析,总结出了悬架系统对操纵稳定性影响的规律和相关因素。
通过对不同路面条件下的仿真试验数据进行统计和分析,可以看出悬架系统对车辆操纵稳定性具有显著的影响。
同时,弹簧的刚度、减震器的阻尼、连杆的长度等因素也会影响到悬架系统的性能表现。
综上所述,本文基于ADAMS/Car软件平台对悬架系统对操纵稳定性影响的仿真试验研究,对深入探讨悬架系统的影响因素和控制方法具有一定的参考价值。
基于ADAMS的悬架系统动力学仿真分析与优化设计
基于ADAMS的悬架系统动力学仿真分析与优化设计一、概述本文以悬架系统为研究对象,运用多体动力学理论和软件,从新车型开发中悬架系统优化选型的角度,对悬架系统进行了运动学动力学仿真,旨在研究悬架系统对整车操纵稳定性和平顺性的影响。
文章提出了建立悬架快速开发系统平台的构想,并以新车型开发中的悬架系统优化选型作为实例进行阐述。
简要介绍了汽车悬架系统的基本组成和设计要求。
概述了多体动力学理论,并介绍了利用ADAMS软件进行运动学、静力学、动力学分析的理论基础。
基于ADAMSCar模块,分别建立了麦弗逊式和双横臂式两种前悬架子系统,多连杆式和拖曳式两种后悬架子系统,以及建立整车模型所需要的转向系、轮胎、横向稳定杆等子系统,根据仿真要求装配不同方案的整车仿真模型。
通过仿真分析,研究了悬架系统在左右车轮上下跳动时的车轮定位参数和制动点头量、加速抬头量的变化规律,以及汽车侧倾运动时悬架刚度、侧倾刚度、侧倾中心高度等侧倾参数的变化规律,从而对前后悬架系统进行初步评估。
1. 悬架系统的重要性及其在车辆动力学中的作用悬架系统是车辆的重要组成部分,对车辆的整体性能有着至关重要的作用。
它负责连接车轮与车身,不仅支撑着车身的重量,还承受着来自路面的各种冲击和振动。
悬架系统的主要功能包括:提供稳定的乘坐舒适性,保持车轮与路面的良好接触,以确保轮胎的附着力,以及控制车辆的姿态和行驶稳定性。
在车辆动力学中,悬架系统扮演着调节和缓冲的角色。
当车辆行驶在不平坦的路面上时,悬架系统通过其内部的弹性元件和阻尼元件,吸收并减少来自路面的冲击和振动,从而保持车身的平稳,提高乘坐的舒适性。
同时,悬架系统还能够根据车辆的行驶状态和路面的变化,自动调节车轮与车身的相对位置,确保车轮始终与路面保持最佳的接触状态,以提供足够的附着力。
悬架系统还对车辆的操控性和稳定性有着直接的影响。
通过合理的悬架设计,可以有效地改善车辆的操控性能,使驾驶员能够更加准确地感受到车辆的行驶状态,从而做出更为精确的操控动作。
Adams_ATV在履带车辆动力学仿真中的应用

1概述相比轮式车辆而言,履带式车辆采用履带行走,就像铺了一道可以无限延长的轨道一样,使它能够平稳、迅速、安全地通过各种复杂路况。
由于接地面积大,所以增大了坦克在松软、泥泞路面上的通过能力,降低了下陷量,而且履带板上有花纹并能安装履刺,所以在雨、雪、冰或陡坡路面上能牢牢地抓住地面,不会出现打滑现象。
同时由于履带接地长度达4~6米,诱导轮中心位置较高,所以可以通过壕沟、垂壁等路障,一般坦克的越壕宽度可达2~3米,可通过1米高的垂直墙。
履带还有一个特殊功能,在过河时,可以采取潜渡的方式在河底行走;若是浮渡履带,还可以像螺旋桨一样产生推进力,驱使车辆前进。
正是因为这些卓越的越野机动性能,使得履带式车辆为兵器行业和工程机械行业所广泛使用。
要提高履带式车辆的动力学走行性能,一方面需要借助各种现场试验,另一方面,也可以借助VPD技术,利用MSC ADAMS/ATV ToolKit进行仿真模拟。
2MSC ADAMS/ATV模块简介MSC ADAMS/ATV Toolkit是MSC ADAMS用于履带式车辆动力学性能仿真的专用工具,是分析军用或商用履带式车辆各种走行动力学性能的理想工具;通过ATV Toolkit,利用其提供的车身、履带、主动轮、负重轮、拖带轮及诱导轮模板,可快速建立履带式车辆的子系统到总装配模型。
ATV Toolkit中提供了多种悬挂模式和履带的模板,方便用户建立各种复杂的车辆模型。
通过改进的高效积分算法,可快速给出计算结果,研究车辆在各种路面(软土、硬土)、不同车速和使用条件(直行、转向)下的动力学性能,并进行方案优化设计。
同时,模型中还可加入控制系统、弹性零件、用户自定义子系统等复杂元素,以使模型更为精确。
在MSC ADAMS/ATV Toolkit 中,既可以建立完整履带车辆模型(包括橡胶履带),也可以建立简化的履带车辆模型(STRING TRACK MODEL)。
3应用案例(1)崎岖路面高速通过分析下图所示为坦克车通过崎岖路面的仿真分析,通过这一分析过程,可以研究悬挂系统对车辆的垂向动力学性能的影响进行分析。
基于ADAMS的悬架系统动力学仿真分析与优化设计
基于ADAMS的悬架系统动力学仿真分析与优化设计摘要:本文基于ADAMS软件,对悬架系统进行了动力学仿真分析与优化设计。
通过建立悬架系统的模型,应用动力学仿真技术,研究了悬架系统在不同工况下的动力学性能,并进行了相应的优化设计。
仿真结果表明,通过优化设计,悬架系统的动力学性能得到了明显的提升,进而提高了整车的操纵稳定性和行驶舒适性。
1. 引言随着汽车工业的发展,悬架系统的性能对于整车的操纵稳定性和行驶舒适性起着至关重要的作用。
因此,对悬架系统进行动力学仿真分析和优化设计具有重要的理论意义和工程应用价值。
2. 悬架系统模型建立首先,根据悬架系统的实际结构和工作原理,建立了悬架系统的运动学和动力学模型。
模型包括弹簧、减振器、转向杆等各个部件,并考虑了车轮与地面之间的接触力和摩擦力。
通过ADAMS软件的建模工具和功能,对悬架系统进行了准确地建模。
3. 悬架系统动力学仿真基于悬架系统的模型,进行了不同工况下的动力学仿真分析。
通过设定不同的工况参数,如路面不平度、悬架系统参数等,研究了悬架系统在不同路况下的动力学性能。
仿真结果显示了悬架系统的悬架行程、车体加速度、横向加速度、滚动转矩等关键参数的变化规律。
4. 悬架系统优化设计根据悬架系统动力学仿真的结果,对悬架系统进行了优化设计。
通过改变悬架系统的参数和结构,优化了悬架系统的动力学性能。
具体而言,通过增加弹簧刚度、调整减振器阻尼等方式改善了悬架系统的行程和刚度特性。
通过优化悬架系统的参数,达到了提高整车操纵稳定性和行驶舒适性的目的。
5. 结果与分析通过悬架系统动力学仿真和优化设计,得到了悬架系统在不同工况下的性能变化趋势。
仿真结果表明,通过合理的优化设计,悬架系统的行程和刚度均得到了明显的改善。
同时,整车的操纵稳定性和行驶舒适性也得到了显著提升。
6. 结论本文基于ADAMS软件,对悬架系统进行了动力学仿真分析与优化设计。
通过建立悬架系统的模型,进行了不同工况下的仿真分析,并进行了相应的优化设计。
基于ADAMS的悬置刚度仿真指南
基于ADAMS的悬置刚度仿真指南悬置系统是汽车重要的组成部分之一,悬置系统的刚度对于汽车的操控性、行驶稳定性以及乘坐舒适度具有重要的影响。
在汽车的设计与开发过程中,需要对悬置系统的刚度进行仿真分析,以评估悬置系统的性能与优化方案。
ADAMS是一款基于多体动力学原理的仿真软件,通过ADAMS可以对悬置系统进行仿真分析,评估不同刚度设置下的悬置系统性能,从而优化悬置系统的设计。
以下是基于ADAMS的悬置刚度仿真指南:1.建立悬置系统模型:首先,根据实际车型的悬置系统设计,建立ADAMS中的刚体系统模型。
模型的建立包括车身、悬挂弹簧、减震器等关键部件。
2.约束和连接:根据实际情况,为刚体系统中的各个部件添加合适的约束和连接关系,以模拟实际的力学性能。
3.刚度参数设置:设置悬挂弹簧和减震器的刚度参数。
通过设置不同的刚度值,可以评估悬挂系统在不同刚度下的动力学性能。
4.路面加载:设置适当的路面加载,在ADAMS中模拟实际道路的动力学输入。
5.运行仿真:运行ADAMS仿真,获取悬置系统在不同刚度设置下的动力学响应,如车身的加速度、悬挂系统的行程、悬挂系统的受力情况等。
6.评估性能:分析仿真结果,评估悬置系统在不同刚度设置下的性能表现。
比较不同刚度设置下的悬置系统动力学响应,选择最优的刚度设置。
7.优化方案:根据评估结果,对悬置系统的刚度进行优化设计。
可以通过改变悬挂弹簧的刚度、减震器的阻尼等方式进行优化,并重新进行仿真分析以验证优化方案的效果。
8.结果分析与报告:对优化后的悬置系统进行结果分析,并将分析结果整理成报告,为后续的悬置系统设计和优化提供参考。
基于ADAMS和MATLAB的汽车主动悬架联合仿真研究
基于ADAMS和MATLAB的汽车主动悬架联合仿真研究基于ADAMS和MATLAB的汽车主动悬架联合仿真研究1. 引言在现代汽车工业中,悬挂系统是保证车辆行驶平稳性和乘坐舒适性的重要组成部分。
传统的汽车悬挂系统是被动的,通过弹簧和减振器来吸收路面不平造成的冲击力,但对于不同路面条件和行驶动态的应对能力有一定的局限性。
随着科技的进步和人们对驾驶体验的要求提高,汽车的主动悬挂系统逐渐得到了广泛关注。
主动悬挂系统能够通过感知路面信息和车辆状态来实时调整悬挂参数,从而提高车辆的行驶稳定性和乘坐舒适性。
2. 主动悬挂系统的工作原理主动悬挂系统由悬挂执行机构、传感器和控制算法等组成。
传感器用于感知路面信息和车辆状态,悬挂执行机构负责实时调整悬挂参数。
控制算法根据传感器获取的信息来生成相应的控制策略,控制悬挂执行机构的工作。
3. ADAMS仿真模型建立ADAMS是一款用于多体动力学仿真的软件,可以模拟机械系统的动力学行为。
在本研究中,我们使用ADAMS软件建立了主动悬挂系统的仿真模型,包括车身、车轮、悬挂执行机构等。
通过在ADAMS中定义悬挂系统的各个参数和控制策略,我们可以模拟不同工况下悬挂系统的工作状态。
4. MATLAB控制算法设计MATLAB是一款强大的数学计算和仿真软件,我们使用MATLAB来设计主动悬挂系统的控制算法。
在控制算法设计中,我们需要考虑路面信息的感知、悬挂参数的调节等因素。
通过MATLAB的编程和仿真工具,我们可以方便地设计和验证不同控制策略的性能。
5. 联合仿真与分析在ADAMS和MATLAB的联合仿真中,我们将MATLAB中设计的控制算法与ADAMS中的悬挂系统模型相结合,进行系统级的仿真和分析。
通过联合仿真,我们可以模拟车辆在不同路面条件下主动悬挂系统的工作情况,评估系统的控制性能和对车辆行驶动态的影响。
6. 结果与讨论通过联合仿真和分析,我们可以得到主动悬挂系统在不同路面条件下的反馈响应结果。
应用ADAMSCAR对轿车悬架系统进行建模仿真
应用ADAMS/CAR对轿车悬架系统进行建模仿真周俊龙 吴 铭上海汇众汽车制造有限公司研究开发中心摘 要:汽车悬架系统为一多体系统,部件之间的运动关系十分复杂,传统的人工计算很难将悬架的各种特性表述清楚。
本文以某轿车为例,应用多体运动学与动力学仿真软件ADAMS中的CAR模块方便地建立了悬架系统的仿真模型,并进行了计算。
关键词:多体系统 悬架 仿真1. 引言在工程应用领域,机械系统的计算机仿真技术变得日益重要。
这种应用在于仿真软件能够使用计算机代码和方程准确的模拟真实的机械系统,避免了传统的产品开发过程中零部件和样机的反复制造、试验等过程,同时硬件建设成本的降低节省了大量的时间和财力,为产品迅速占领市场赢得了更多的机会。
鉴于仿真软件带来的上述优点,其应用正在变得越来越广泛。
在众多的软件中,汽车工业中广泛应用的ADAMS则是非常具有代表性的一个运动学与动力学仿真软件。
2. 悬架的仿真模型原理CAR模块是ADAMS软件包中的一个专业化模块,主要用于对轿车(包括整车及各个总成)的动态仿真与分析。
对于悬架系统来说,ADAMS/CAR在仿真结束后,可自动计算出38种悬架特性,根据这些常规的悬架特性,用户又可定义出更多的悬架特性,产品设计人员完全可以通过这些特性曲线来对悬架进行综合性能的评价和分析。
应用ADAMS/CAR对悬架系统进行建模原理相对比较简单,模型原理与实际的系统相一致。
考虑到汽车基本上为一纵向对称系统,软件模块已预先对建模过程进行了处理,产品设计人员只需建立左边或右边的1/2悬架模型,另一半将会根据对称性自动生成,当然设计人员也可建立非对称的分析模型。
在建立分析总成的模型过程中,ADAMS/CAR的建模顺序是自下而上的,所有的分析模型都是建立在子总成基础之上,而子总成又是建立在模版的基础上,模版是整个模型中最基本的模块。
然而模版又是整个建模过程中最重要的部分,分析总成的绝大部分建模工作都是在模版阶段完成的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Abstract: Based on the str ucture and com po nent ial propert ies of t racked vehicle suspension, a no nlinear half-vehicle m odel wit h 8 DOF s is used t o simulate t he suspension. It also prov ided w ays and m eans of establishing and analy zing t he m odel wit h t he ADAM S. A t ime domain ro ad input const ruct ion method is pr opo sed, and t he infl uence of t he tr ack is co nsidered. Simulation result s under t he repr esent ative velocit y and road input proved t hat the mo del can sim ulat e t he geom et rical nonlinearity of t he suspension very w ell , ev en w hen some ro ad w heels bo unce of f t he gro und. Based on t his mo del, t he o pt imum suspension damping and st iff ness coeff icient s under dif ferent running conditio ns can be w or k out w ith the o pt imize f unction of ADAM S.
Gq
(
n0 )
n20 (
f
- - 1
kl
f
) - 1
ku
.
(
8)
f kl
当车速 v 给出后, 对于给定的 k , f k 和 ak 都可以求
出确定的数值. 对于 k , 可以用程序产生, 最后, 将式
( 8) 生成的数据经过一个上截止频率值为 nu 的低通
滤波器后和式( 1) 确定的履带节距输入相加.
输入为一个基频 nT = 1/ tT 的尖脉冲, 考虑到负重轮
挂胶的弹性, 可用半正弦脉冲表示为
A 0 sin( 2 v nTt + 0 ) , qT =
0,
t∈
v
k nT
,
k+ 1 2v nT
.
其他
( k = 0, 1, 2, …)
( 1)
式中: A 0 为输入半正弦脉冲幅值; v 为车速.
2 模型的简化
第 25 卷 第 8 期 2005 年 8 月
北京 理工 大学 学报 T r ansactions of Beijing Instit ute o f T echnolog y
文章编号: 1001-0645( 2005) 08-0670-04
V ol. 25 N o . 8 Aug . 2005
关键词: 履带式车辆; 悬挂系统; 动力学仿真; 非线性系统 中图分类号: T J 810. 332 文献标识码: A
Simulation of Nonlinear Tracked Vehicle Suspension with ADAMS
DONG M ing -ming , GU Liang
( 3)
式中: M c 为阻尼力矩, N ·m ; 为减振器拉臂的角
频率, rad/ s; Ceq 为等效阻尼系数.
实际建模中, 将负重轮与地面的作用力表示为
一个碰撞函数来模拟负重轮离地工况.
- kt( z i- qi ) p - ct ( z·i- q·i) Fi =
0
z i- qi < j .
z i- qi ≥ j
1 履带对车辆悬挂系统的影响[ 2, 3]
用路面谱输入的滤波作用滤掉了路面不平
度中比履带节距空间频率高的频率成分, 使履带节
距空间频率 nT 成为路面不平度的上限频率 nu ,
两块履带连接处的缝隙, 在路面不平度中加
入了与履带节距相应的周期性激励, 输入的空间谱
基频 nT= 1/ t T, 其中, t T 为履带的节距. 履带节距的
仿真结果影响很小.
实际车辆悬挂系统的各个弹性元件和阻尼元件
完全相同. 针对每个负重轮的悬挂子系统, 扭杆弹簧
中心点、减振器中 心点与 车体质 心的距 离为别 为
l ki, i= 1, 2, …, 6 和 lcj , j = 1, 2, 6. 第 3, 4, 5 负重轮的 平衡肘没有安装减振器, 但由于履带和各旋转副的
的切变弹性模量, Pa; d 为扭杆工作直径, m; L 0 为扭
杆工作长度, m.
该履带车辆减振器的扭转阻尼系数和减振器拉
臂角速度间的关系近似线性. 对减振器特性进行等 效线性化后, 将大大加快模型的仿真速度, 便于进行 最佳阻尼的求解, 因此, 在模型的仿真过程中, 认为 减振器的阻尼力矩满足
M c= Ceq .
摩擦作用, 相应的子系统存在一定的阻尼. 在第 3,
4, 5 负重轮处添加一定的阻尼, 还能够改善系统仿
真时的数值稳定性. 仿真计算时, 将第 2 负重轮在静
平衡位置附近的阻尼系数折算到扭杆转动中心所得
到阻尼的 1% 作为这 3 个负重轮的附加阻尼, 可以
得到: lcj = lkj ; j = 3, 4, 5. 简化后车辆系统的模型如图 1 所示, 共有 8 个
收稿日期: 2004 09 22 基金项目: 国家部委预研项目( 20010453) 作者简介: 董明明( 1975- ) , 男, 博士, 讲师, E-mail: vdmm@ bit . edu. cn .
第 8 期
董明明等: 履 带车辆非线性悬挂系统的 A DA M S 仿真
6 71
下大大简化模型, 提高仿真速度[ 1] .
履带车辆非线性悬挂系统的 ADAMS 仿真
董明明, 顾 亮
( 北京理工大学 机械与 车辆工程学院, 北京 100081)
摘 要: 根据履带车辆悬挂系统的结 构特点和元件特性, 将履带车辆悬挂系统简化为非线 性八自由度半车模型, 并 给出了应用 A DA M S 软件进行仿真的方法. 建模过程中考虑了履带对路面激励的影响, 并给出了路 面时域输入的 构造方法和软件实现. 对常用车速和典型路面的 仿真结果表明, 所建立的非线性 模型能够较好地反 映履带车辆悬 挂系统的几何非线性, 并能够对负重轮离地情况正确模拟. 基于此模型, 应用 A DA M S 的优化功能, 可以得到履带 车辆不同行驶工况下的最优悬挂阻尼和刚度 系数.
软件对模型的验证如下: VERIFY M ODEL : . t ank8 31 Gruebler Count ( appro ximat e degrees of
fr eedo m)
32 M oving P art s ( no t including g round)
16 Revol ut e Jo int s 13 T ranslat ional Joint s 12 Fix ed Joint s 6 M ot ions 8 Degrees of Fr eedom f or . t ank8 履带车辆最常用的行驶工况之一为 E 级路面, 30 km / h. 车体角加速度, 质心加速度、驾驶员座椅 处加速度的时域和自功率谱密度曲线分别如图 2~ 图 7 所示. 图中曲线为选取仿真时间长度为 5 s 的 稳态响应曲线, 仿真时间取得过长, 会使响应曲线过 分的密集, 不便于从图上观察曲线的性态.
根据履带车辆弹性 元件和阻尼元件的工作特
点, 分别将其简化为扭转弹簧和扭转减振器[ 4] . 由于
扭杆弹簧的弹性力矩和扭转变形呈线性关系, 以平
衡肘转角作为广义坐标, 弹性力矩可表示为该广义
坐标的线性函数. 扭杆弹簧的扭转刚度可表示为
k=
Gd 32L
4
.
0
( 2)
式中: k 为扭杆的扭转刚度, N ·m / rad; G 为弹簧钢
由于路面时域输入的功率谱密度值与频率的平
方成反比, 因此, 按对数坐标等距的 1/ 3 倍频程划分
频率间隔. 设( f kl, f ku ) 为第 k 个频率段, f kl和 f ku 分
别为该频率段的下限和上限频率, 则有
f ku/ f kl= 21/ 3, 即 ln ( f ku/ Hz) - ln( f kl/ Hz) = ( ln2) / 3.
p = 1. 2; kt , ct 分别为挂胶的刚度和阻尼系数, 挂胶刚
度按负重轮挂胶静载下的变形推算, 阻尼系数取为
ct = 0. 03 kt mw ,
( 5)
式中 mw 为负重轮的质量. 添加挂胶的阻尼系数, 是为了仿真的数值稳定
性. 挂胶阻尼系数在 0. 1ct ~10. 0ct 之间变化时, 对
( 4)
式中: Fi 为地面对负重轮的作用力, N , 正向垂直向
上; z i 为第 i 个负重轮心相对于其静平衡位置的垂
直位移, m , 正向垂直向上; qi 为第 i 个负重轮接地处
的地面不平度, m , 正向垂直向上; R w 为负重轮挂胶
的静变形量, m ; p 为非线性指数, 对于橡胶通常取
由于履带所包含的刚体数多, 相互之间的约束 关系复杂, 直接将其与车辆其他部件共同建立动力 学模型, 会使模型的仿真时间和结果的不确定性增