高速履带车辆履带预紧张力对平顺性的影响
坦克履带结构及其作用

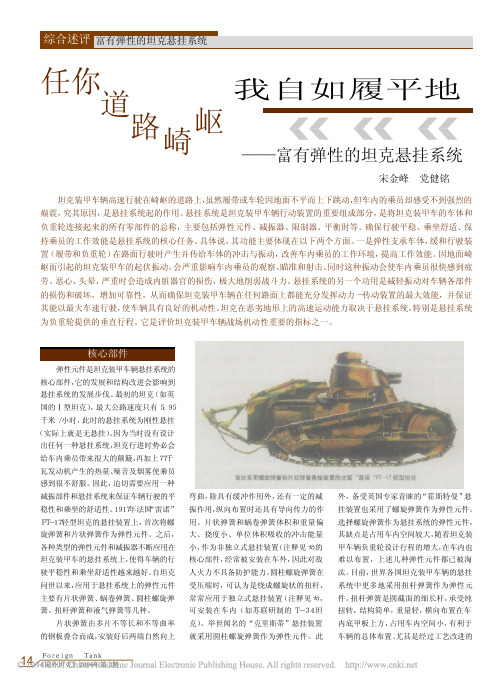
坦克履带结构及其作用履带式坦克装甲车辆装有两条履带。
它完全暴露在坦克外部,不断承受着地面的冲击负荷和剧烈振动,在十分恶劣的工作条件下将主动轮的扭矩变为坦克装甲车辆的牵引力,推动战车向前行进;同时它还能增大坦克装甲车辆的着地面积和附着力,提高战车的通行能力。
根据需要,可安装金属铰链履带或挂胶履带。
作战时,一般采用越野能力较好的金属铰链履带,这种履带在必要时可以安装防滑履刺;有时候候,为了不损坏路面或降低噪音,可以使用挂胶履带。
每条履带都是由许多履带板组成的,板上有直径相同的销耳孔及啮合孔,安装时用履带销穿入销耳孔后,将履带板连接成整条履带,然后绕在负重轮、主动轮和诱导轮上,其啮合孔与主动轮上的齿相啮合,便将发动机传过来的扭矩通过履带转变成推动车辆前进的牵引力,从而使车辆前进。
坦克履带坦克履带履带的工作环境是非常恶劣的,它既要传递大的扭矩,同时又要在各种复杂地面上作高速运动,受到的损伤是非常大的,因此需要对它加倍呵护,加强对它的检查与保养。
调整履带的松紧程度,就像给战车选取一双尺码合适的战靴一样,这是技术保养工作的一项重要内容。
坦克履带履带的松紧程度如同鞋子的尺码一样,过大或过小都是不利于行动的。
保证合适的松紧程度有利于:提高坦克装甲车辆的行驶性能。
就是根据地面情况,改变战车的附着牵引力和滚动阻力的大小,以适应地面的特点,从而提高车辆的行驶性能。
例如,在水稻田中附着牵引力虽不算大,但仍比滚动阻力大得多,可以充分满足附着牵引力大于滚动阻力的条件,车辆不会打滑,在这种情况下,降低滚动阻力是主要的,故履带宜调紧一些。
反之,在松沙地上,滚动阻力虽不大于水稻田滚动阻力,但附着牵引力却小得多,不能充分满足附着牵引力大于滚动阻力的条件。
在这种情况下,增大附着牵引力是主要的,故履带宜调松一些。
坦克履带防止坦克装甲车辆的偏驶。
履带式坦克装甲车辆在两侧履带板节距基本相同的条件下发生偏驶就是由于两侧履带松紧程度不一致而造成的。
任你道路崎岖我自如履平地_富有弹性的坦克悬挂系统
15 F o r e i g n T a n k
《国外坦克》2006 年第 1期
综合述评 富有弹性的坦克悬挂系统
先进的结构设计对 20 世纪 30、40 年代坦 克装甲车辆悬挂系统的发展产生过重 大影响。
液气悬挂系统开辟新篇章 液气悬挂是以油液传递压力,以气 体(一般为氮气)为弹性元件的一种悬挂 系统,其最大特点是悬挂特性为“非线 性”的。所谓“非线性”是指弹性元件变 形越大时,吸收的冲击能量就越大,呈非 线性增加,这样就可以使坦克保持较高 的平均行驶速度。液气悬挂的缺点是结 构较复杂,价格较高,由于安装在车外, 中弹后易损坏,在战场上,可调式液气悬 挂系统一旦损坏,修复可不是一件容易 的事情。早在 20 世纪 30 年代,英国坦克 就曾应用过液气弹簧作为悬挂系统的弹 性元件。但受到当时制造水平和动密封 元件质量的限制,可靠性差,没有得到进 一步的应用。随着液压技术的发展和制 造技术的进步,到了 20 世纪 60 年代,液
且重量更轻,其弹簧力可根据路况的变 化及载荷的不均自行调整,使其稳定性 达到了原来的 2 倍。
引领潮流的扭杆悬挂系统 扭杆弹簧实际上是一种细长的金属 杆,在车底甲板上横向安装。其长度与车 体宽度差不多,它的一端固定在车体支 架上,另一端与平衡肘导管相连,在行驶 过程中负重轮的上、下跳动使扭杆扭转, 以吸收地面对车体的冲击能量。每一个 负重轮都与一根扭杆相连,扭杆数目与 负重轮数目相同。扭杆的直径和长度决
高速履带车辆诱导轮张紧力的计算与仿真

托带轮的影响时, 可以近似认为上支履带板的张紧 力与诱导轮周围履带张紧力相等.
根据式 ( 10)可以得到 F3 与张紧力 T i 的数学关 系:
F3
T i l2 [ s in( i +
2 ) + cos( i -
1 ) ] + (m l l1 + m i l2 ) g s in i - m i l2 ( x cos i - y s in i ) - F li l2 co s( t l3 s in j
第 1期
面稍大.
袁 芬等: 高速履带车辆诱导轮张紧力的计算与仿真
47
2 2 纵向加、减速行驶
车辆在平坦路面上, 0~ 10 s内主动轮的角加 速度为 6 r / s2, 然后匀速行驶, 在 20~ 30 s内主动 轮的角加速度为 - 6 r / s2. 加速和减速时的张紧力 如图 7所示. 加速时, 主动力矩增加, 上支履带张 紧, 所以诱导轮周围张紧力也较大; 减速时, 有制 动力矩作用在主动轮上, 上支履带放松, 诱导轮周 围张紧力处于较小值.
(8)
46
车辆与动力技术
2 008 年
2=
-
= a tan lx ti - l2 s in j - a s in rf - rj .
lyti + l2 cos j
lju
( 9)
其中 rt 为托带轮半径; rf 为负重轮半径; lju为负 重轮和诱导轮间的距离.
可见, 1 和 2 的计算公式中只有一个变量 i, 这为测量和计算带来了很大的方便.
K ey w ord s: tracked veh icle; idler; tension; simu lation
在履带车辆中, 张紧力对车辆的平顺性、通过 性和机动性有深刻影响. 张紧力太大会增加履带和 底盘部 件的摩擦, 能 量损失严重, 并有断带的危 险; 张紧力太小, 容易发生脱带, 造成车辆在瞬间 瘫痪. 因此为提高车辆的综合性能, 履带张紧力需 要在各种行驶工况下调整在一个最佳范围内, 为达 到这一目的, 首先要完成履带环张紧力的计算. 然 而在实际行车中, 履带脱带和断带等故障经常发生
汽车平顺性解析

•汽车平顺性概述•汽车平顺性的动力学原理•汽车平顺性的影响因素目•提高汽车平顺性的策略与方法•汽车平顺性的未来发展趋势与挑战录平顺性对于乘客的舒适度和健康有着重要影响,是评价汽车性能的重要指标之一。
定义与重要性重要性定义座椅设计座椅的形状、材质和硬度等都会影响乘客的舒适度,从而影响平顺性的评价。
悬挂系统悬挂系统的设计、调整和性能对平顺性有很大影响。
车辆自重车辆自重越大,对路面冲击越大,影响平顺性。
路面质量路面质量差会导致车辆颠簸,行驶速度行驶速度越快,风阻和路面不平整对车辆的影响越明显,影响平顺性。
平顺性的影响因素平顺性的评价标准车身作为振动系统的主要组成部分,会因为路面不平整、车轮不平衡、发动机及传动系统等内部组件的振动而产生振动。
车身振动系统的频率响应特性和阻尼特性是影响平顺性的关键因素。
车身振动系统的固有频率和阻尼比对平顺性的影响已被广泛研究,并被用于指导车辆的结构设计和动态性能优化。
车身振动系统轮胎的动态特性和路面不平度共同决定了作用于车身的激振力。
轮胎的刚度和阻尼特性对平顺性具有重要影响,而轮胎的充气压力和轮胎花纹设计等参数也会影响其动态特性。
轮胎作为车轮与路面之间的界面,是影响汽车平顺性的关键因素之一。
轮胎动力学悬挂系统是连接车身和车轮的关键部件,其动力学特性对平顺性有很大影响。
悬挂系统的设计需要平衡和优化其刚度、阻尼和几何形状等参数,以实现良好的隔振效果。
采用主动或半主动悬挂系统可以更好地实现动态调节,进一步提高汽车的平顺性。
悬挂系统动力学驾驶员操作与感觉反馈悬挂系统轮胎动力系统030201车辆性能路面质量道路坡度交通拥堵路况质量风速气温过高或过低会影响车辆的悬挂系统和轮胎性能,从而影响平顺性。
气温能见度环境条件03违规驾驶01驾驶技巧02超速行驶驾驶员行为与操作车辆性能优化悬架系统优化车身结构优化座椅舒适度优化路况改善适应性悬挂系统轮胎选择与匹配路况改善与适应性技术环境适应性悬挂系统通过采用环境适应性悬挂系统,可以自动调整悬挂系统的刚度和阻尼,以适应不同的环境条件,从而提高平顺性。
履带起重机稳定性影响因素分析
履带起重机稳定性影响因素分析【摘要】履带起重机在工业中处于一个重要的位置,装载和称重等一系列工作皆由其完成。
为了更好地将履带起重机用于工业作业中,为了更好地改善履带起重机的弊端,加快其研究开发。
本文对履带起重机的稳定性进行了研究分析,主要从起重机的主要机构及其作用和各部分对稳定性的影响进行分析,以期可以为国家研发履带起重机的项目提出有利的意见和建议。
【关键词】履带起重机稳定性影响因素在我国的重工业发展当中,机械制造业起着链接的作用。
履带起重机的发展与研究能为将来的工业作业带来更加庞大的利益与便利。
那么,关于履带起重机的运用方面以及其主要的操作方式,都是应该被了解和认识的。
本文对于影响其稳定性的因素进行了研究和探讨,并以此做出简单分析。
1 履带起重机的主要用途履带起重机是以履带及其支撑驱动装置为运行部分的流动式起重机,可用来进行机械设备和重型器械的检查、检修,在各生产环节中充当搬运者的角色。
履带起重机是用来运输材料、吊重和装卸重型物件的机器,这种起重机通常不使用支腿,所以可带载行驶。
在道路疏通、石油化工、兴修水利等重大工程中都充当重要角色。
履带起重机的主要机体是用一种高强度、低成本的材料制成的。
其它部分则分别是动力机械、工作台以及起重臂和转台[1]。
目前对于履带起重机的稳定性研究主要来源于对其臂架的稳定性研究。
根据分析,排除不确定因素,其主要影响在于在设计的过程中受到加工制造、材料特性、组件尺寸等部分的影响。
因此,从多角度分析臂架对于履带起重机的稳定性影响是有必要的。
那么借鉴其它文献资料,本文于臂架的部件将做着重分析。
2 关于稳定性的研究对于稳定性的研究从力学发展的伊始便没有停止过,随着工业化的发展和进步,稳定性更显得尤为重要。
专业人士为此制定了一系列的研究方法和分析实践,最为人熟知的是势能驻值法、微分方程法、能量法以及有线单元法等。
除此之外,18世纪一些国外的科学家对于稳定性就提出过相关理论,但由于当时社会还处于封建时期,对于科学研究并不能做到全面支持和肯定,这使当时的研究受到很大的局限性和约束性[2]。
影响汽车平顺性的主要因素

影响汽车平顺性的主要因素汽车振动系统本身和路面输入的复杂性决定了影响汽车平顺性的因素很多。
下面从结构与使用两个因素做出分析。
(一)结构因索汽车是一个由多质量组成的复杂振动系统,为便于分析,需要进行简化。
一般情况下,汽车可视为由彼此相联系的悬架质量和非悬架质最所组成。
悬架质量M主要由悬架弹簧上的车身、车架及其上的总成所组成。
非悬架质最m主要由悬架弹簧下的车轮和车轴组成,由此形成由车身和车轮组成的双质最振动系统,如图I一13所示。
而且实际上从振动角度看,由于存在前、后车轮两个路面输入。
这就决定汽车有垂直和俯仰两个自由度振动,从而导致汽车纵轴线上任一点的垂直振动不同。
下面定性分析结构因索对汽车平顺性的影响。
(1)悬架弹性的影响。
悬架弹性对车身振动频率起着决定性的作用。
悬架上的载荷与其变型之间的关系称为弹型元件的弹性特性。
如果悬架的刚度是常数,则其变形与所受载荷成正比,这种悬架称为线性悬架,一般钢板弹簧、螺旋弹簧悬架均属此类。
采用线性悬架的汽车往往不能满足汽车平顺性的要求,使用中.汽车的有效载荷变化较大(特别是公共汽车和载货汽车),会出现空载时振动频率较高或满载振动频率较低的现象。
为了改善这种情况,现代汽车多采用非线性悬架(也称变剐度悬架),即其刚度可随栽荷的变化而变化。
如采用空气弹簧、空气液力弹簧和橡胶弹簧等具有非线性特性的弹性元件,或增设副簧、复合弹簧。
(2)悬架阻尼的影响。
为了衰减车身的自由振动并抑制车身和车轮的共振,以减小车身的垂直振动加速度和车轮的振幅(防止车轮跳离地面),悬架系统中应具有适当的阻尼。
悬架的阻尼主要来自于减振器、钢板弹簧叶片和轮胎变形时橡胶分子间的摩擦等。
钢板弹簧悬架系统中的干摩擦较大,而且钢板弹簧叶片数目越多,摩擦越大,故有的汽车采用钢板弹簧悬架时可以不装减振器,但弹簧摩擦阻尼的数值很不稳定.钢板生锈阻力力过大,不易控制。
而采用其他内摩擦很小的弹性元件(如螺旋弹簧、扭杆弹簧等)的悬架,必须采用减振器,以吸收振动能量而使振动迅速衰减。
基于模糊PID的动态履带张紧力控制系统研究
第 43 卷第 5 期2023 年 10 月振动、测试与诊断Vol. 43 No. 5Oct.2023 Journal of Vibration,Measurement & Diagnosis基于模糊PID的动态履带张紧力控制系统研究∗陈兵1,马凯璇1,刘洋1,冯占宗2,赵韬硕2,孙志辉1(1.北京科技大学机械工程学院 北京,100083) (2.中国北方车辆研究所 北京,100072)摘要履带张紧力是影响履带可靠性的主要因素,保持履带张紧力的稳定性有利于提高履带服役寿命,使整车在越野工况中发挥出优越的性能。
在对托带轮、负重轮、诱导轮以及履带张紧器的几何关系及受力分析的基础上,建立了履带张紧力的理论估算模型,通过与多体动力学仿真结果进行比较,验证了履带张紧力理论估算模型的正确性。
在此基础上,基于模糊比例‑积分‑微分(proportional‑integral‑derivative,简称PID)控制理论设计了一种履带张紧力控制系统,可通过转动诱导轮曲臂来调整履带的松紧度。
仿真结果表明:该控制系统能够快速、准确地达到期望履带张紧力,可有效地抑制车体振动的情况及托带轮所受履带的冲击载荷,增加了履带车辆行驶的可靠性。
与传统的诱导轮固定方式相比,该控制系统可有效降低接地段履带的动态张力,且没有加剧履带脱轮的风险。
关键词履带张紧力;诱导轮;数学模型;模糊PID;RecurDyn+Matlab/Simulink联合仿真中图分类号TP273.4引言履带是履带车辆最典型的特征之一,其主要功能是包裹所有车轮并提供连续滚动的轨道,使车辆能够获得较低的接地压力[1]和较高的附着力。
大多数现代履带由履带板、履带销和橡胶衬套交替连接[2],可以确保车辆在崎岖不平的地形上高速平稳通过[3‑5]。
履带张紧力对履带装置的动态性能有显著影响[6‑7]。
车辆在行驶过程中,由于履带、负重轮和地面之间的接触和碰撞,其履带张紧力变化很大[8]。
改善履带式集材拖拉机行驶平顺性的研究
1997年6月农业机械学报第28卷第2期改善履带式集材拖拉机行驶平顺性的研究陈吉清 兰凤崇 郑世红 【摘要】 为了研究履带式集材拖拉机的行驶平顺性,将其简化为三自由度振动力学模型。
以国产集材-50型拖拉机为对象,进行了模拟计算和实地试验,其模拟计算结果与试验结果能较好吻合。
此外还研究了各振动参数对行驶平顺性的影响,提出了改善平顺性的具体建议。
叙词:履带式拖拉机 行驶稳定性 计算机模拟1 振动力学模型为了使模拟计算适宜工程应用,对所建力学模型作如下简化:¹只考虑等速直线行驶时车体的垂直振动、纵向角振动和座椅系统的垂直振动,忽略车体的横向角振动;º设经常的工况是在平衡位置附近作小幅振动,刚度是常数,阻尼是速度的一次函数;»忽略发动机、传动系的振动对行驶平顺性的影响。
根据上述条件,履带式集材拖拉机可简化为图1所示的三自由度(Z c、W c、Z p)力学模型。
Z c、W c、Z p——车体垂直位移、纵向角位移、座椅垂直位移M c、J y、M p——车体总质量、纵向转动惯量、驾驶员质量K f、K r——前后悬架刚度C f、C r——前后悬架阻尼K p、C p——座椅系统刚度和阻尼q A、q B——A、B两点垂直位移q1、q2、q3、q4——4个支重轮地面不平度输入位移a、b、l1~l7——尺寸代号图1 履带式集材拖拉机-座位系统振动力学模型2 随机振动模拟对图1的力学模型应用第二类拉格朗日方程,可得系统振动的微分方程组如下 收稿日期:1996-01-10陈吉清 吉林工业大学汽车工程学院 讲师,130025 长春市兰凤崇 吉林工业大学汽车工程学院 副教授郑世红 吉林工业大学汽车工程学院 工程师M c Z b c +(C f +C r +C p )Z a c +(l 1C f -l 2C r +l 3C p )W a c -C p Z a p + (K p +K r +K f )Z c +(l 1K f -l 2K r +l 3K p )W c -K p Z p =C f q a A +C r q a B +K f q A +K r q B J y W b c +(l 1C f -l 2C r +l 3C p )Z a c +(l 12C f +l 22C r +l 32C p )W a c -l 3C p õZ a p + (l 1K f -l 2K r +l 3K p )Z c +(l 12K f +l 22K r +l 32K p )W c -l 3K p Z p =l 1C f q a A -l 2C r q a B +l 1K f q A -l 2K r q B M p Z b p -C p Z a c -l 3C p W a c +C p Z a p -K p Z c -l 3K p W c +K p Z p =(1) 其中q A 和q B 都是路面激励q 1、q 2、q 3、q 4的函数,其具体表达式为q A =(l 4+l 5)b (a +b )l 4q 1+(l 4+l 5)a (a +b )l 4q 2-l 5a (a +b )l 4q 3-l 5b (a +b )l 4q 4(2)q B =-l 6b (a +b )l 4q 1-l 6a (a +b )l 4q 2+(l 4+l 6)a (a +b )l 4q 3+(l 4+l 6)b (a +b )l 4q 4(3) 将式(2)、(3)代入式(1),并用矩阵形式表达,即[M ]{Z b }+[C ]{Z a }+[K ]{Z }={C t }{q a }+[K t ]{q }(4)式中 Z ——坐标分量,{Z }={Z c W c Z p }T [M ]、[C ]和[K ]——分别为振动系统的质量、阻尼和刚度矩阵 q ——路面激励的坐标分量,{q }={q 1 q 2 q 3 q 4}T [C t ]、[K t ]——对应路面激励的系数矩阵用线性系统理论的分析方法,将道路的激励谱S (f )作为系统的输入,车辆振动的加速度响应作为系统的输出,其输入和输出在频率域内有如下关系[S Z (f )]=(2P f )4[H *(f )][S (f )][H (f )]T(5)式中 [S Z (f )]——系统加速度响应的功率谱矩阵 [H *(f )]——复合频率响应函数矩阵的共轭矩阵 [H (f )]T ——复合频率响应函数矩阵的转置矩阵 [S (f )]——道路谱矩阵(由东北林区典型集材道路的实测功率谱证明,其道路不平度规律基本符合ISO/WG4推荐的路面谱规律)图2 集材-50拖拉机驾驶座濎ä倍频程加速度均方根值比较按以上步骤,编制了计算程序。
履带车辆行驶力学
履带车辆行驶力学作为一种重要的陆地交通工具,履带车辆在军事、工程和农业等领域发挥着重要作用。
它们以其独特的行驶方式和强大的通过能力而闻名于世。
履带车辆的行驶力学是研究它们行驶原理和行为的学科,深入了解履带车辆的行驶力学对于设计和操作履带车辆具有重要意义。
在履带车辆的行驶力学中,最基本的概念是牵引力和阻力。
牵引力是指车辆向前行驶时轮胎或履带对地面施加的力,而阻力则是车辆行驶时所遇到的阻碍力。
牵引力和阻力之间的平衡关系决定了车辆行驶的速度和稳定性。
履带车辆的牵引力主要来自于履带与地面之间的摩擦力。
履带上的齿轮通过发动机的动力带动履带运动,履带与地面之间的摩擦力将车辆向前推进。
摩擦力的大小取决于履带的质量、地面的条件和履带与地面之间的接触面积。
当地面湿滑时,摩擦力会减小,导致牵引力不足,车辆容易打滑。
因此,在湿滑的地面上行驶时,履带车辆需要采取一些措施,如增加履带的接触面积或使用特殊材料的履带,以增加牵引力。
除了摩擦力,履带车辆还需要克服阻力才能行驶。
阻力可以分为滚动阻力、空气阻力和坡度阻力三种。
滚动阻力是车辆在行驶过程中履带与地面之间的摩擦阻力,它随着车辆速度的增加而增加。
空气阻力是车辆行驶时空气对车辆的阻碍力,它随着车辆的速度和形状而变化。
坡度阻力是车辆行驶在斜坡上时需要克服的重力阻力,它随着坡度的增加而增加。
在履带车辆的行驶过程中,还有一个重要的概念是稳定性。
稳定性是指车辆行驶时保持平衡和稳定的能力。
在高速行驶或通过不平坦路面时,履带车辆的稳定性显得尤为重要。
稳定性的影响因素包括车辆的重心高度、轮距和悬挂系统等。
较低的重心和适当的轮距可以提高车辆的稳定性,而高度的重心和较大的轮距则会降低车辆的稳定性。
履带车辆的转向也是其行驶力学中的重要方面。
履带车辆通常采用不同的转向方式,如差速转向和转向制动转向。
差速转向是指通过分配不同的驱动力来实现转向,而转向制动转向则是通过制动某一侧的履带来实现转向。
差速转向适用于低速行驶和转弯,而转向制动转向适用于高速行驶和紧急情况下的转弯。
履带行驶系统数学模型及张紧力计算
履带行驶系统数学模型及张紧力计算马星国;潘仕卫;尤小梅;叶明;龚雪莲【摘要】根据高速履带车辆履带系统的结构,分析履带系统各部分受力,建立负重轮及其曲臂、诱导轮及其曲臂的数学模型,得到履带系统各部位的张紧力以及地面对负重轮法向力的计算公式。
建立Recurdyn整车动力学模型,进行多工况下的仿真,得到履带张紧力、以及负重轮法向力的仿真结果,将仿真与公式计算结果相对比,结果表明:公式计算结果与RecurDyn仿真结果具有很好的符合度,验证了公式的准确性。
本研究结果为履带行驶系统张紧力的控制奠定了基础。
%According to the structure of a tracked system in tracked vehicles,the forces acting on components of the tracked system were analyzed and mathematical models for components were established.The formulas for track tensions and normal forces between wheels and ground were derived with the mathematical models,and the formulas were verified by comparing the calculated results with the formulas to the simulation results with Recurdyn dynamci model.The formulas provided a theoretical basis for control of tensions of a tracked system.【期刊名称】《振动与冲击》【年(卷),期】2014(000)003【总页数】5页(P186-190)【关键词】履带车辆;张紧力;动力学模型【作者】马星国;潘仕卫;尤小梅;叶明;龚雪莲【作者单位】沈阳理工大学机械工程学院,沈阳 110159;沈阳理工大学机械工程学院,沈阳 110159;沈阳理工大学机械工程学院,沈阳 110159;北京北方车辆集团有限公司,北京 100072;北京北方车辆集团有限公司,北京 100072【正文语种】中文【中图分类】TH212;TH213.3履带是履带行驶装置的重要部件之一。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4 仿真结果
该履带车分别 以车 重的 6% 、8% 、10% 、12% 、14% 的预
254
图 2 履带车辆多体动力学模型 张紧力在特定 路面行驶, 仿真计算得到 了驾驶员处 振动加速 度、俯仰加速度和动张紧力等信号。驾 驶员处垂直 方向振动 加速 度如图 3所示, 驾驶 员处垂 直方向 振动加 速度、轴向振 动加速度、纵向振动 加速度、俯 仰角 加速度 和动 张紧 力的平 均 值、标准差、有效值的分别如表 1、表 2、表 3、表 4、表 5; 图 4 为驾驶员处垂 直方向振 动加速 度的 有效值 随预 张紧 力的变 化。
带车辆脱带的 概率, 减少振动、跳动, 但 预紧力过大 会导致主
动轮和履带磨 损剧烈。对于后驱动履带车辆 , 主动 轮上支端
和斜支端受力 如图 1所示。
主动轮上 支端履带动张紧力
F 1 = F0 + FC
( 1)
主动轮斜 支端履带动张紧力
25 3
图 1 履带张紧力
F2 = F + F 0 + FC
0. 9881 1. 075 1. 141 1. 187 1. 211
表 2 驾驶员处横向振动加速度
统计量
平均值 ( m / s2 ) 标均差 ( m / s2 ) 有效值 ( m / s2 )
6% 0. 164 1. 14 1. 152
预张紧力
8%
10% 12%
0. 169 0. 1708 0. 173
FC
=
0. 03Kd
m v2 lg
( 4)
式中: m 为单块履带板的质量; v 履带 速度 ( km /h); lg 单
块履带板长 ; Kd = 0. 5, 用于有托带轮的行动装置; Kd = 2, 用
于无托带轮的行动装 置和有预扭力的履带。
以上对履带张紧力的分布 做简化分析, 在实际 履带车辆 中, 由于路面不平度 和履带 与地 面间的 摩擦 力的影 响, 导致
1 引言
履 带车辆 行驶平 顺性是 保持履带 车辆在 行驶过 程中乘 员所处的振动环境具有一定舒 适度的性能, 良好的 行驶平稳 性可以保证乘员在 复杂 的行驶 和操 纵条件 下具 有良好 的心 理状态和准确、灵敏的反应, 充分 发挥履带 车辆的驱动 能力, 提高火炮的精度。 车辆 行驶平 稳性 直接取 决于 悬挂系 统性 能, 目前国内外对悬 挂的动 力学 仿真做 了较 多工作 , 一 般采 取线性模型或非线性模型进行 动力学仿真, 通常不 考虑履带 对履带车辆的平顺性 的影响, 但实际上 履带也是履 带车辆的 一重要组成部件, 是 不能不 考虑 的, 在工程 实际 中常根 据经 验来给履带预张紧力 , 履带预张紧力对 高速履带车 辆的平顺
ABSTRACT: T he m aneuverab ility, ride quality and dependab ility research of h igh- speed tracked veh ic les is an im portant subject in resea rch o f high- speed tracked veh icles. A t present, we usually don t' cons ide r the pre - tension influenc ing the r ide qua lity o f the high- speed T racked V eh ic le in theory, and w e usually g ive the pre - tension ac cord ing to expe riences. N on linear dynam ic mu ltibody model of h igh- speed tracked vehicles, road m ode l and track m odel are estab lished based on the software R ecurD yn fo r dynam ic sim ulation. T he results o f a lo t o f simu la tions using sam e v elocity and road, based on pre- tension changes of 6% 、8% 、10% 、12% and 14% are analyzed. If pre - ten sion is low , track easily fa lls off, if pre- tension is h igh, the track and dr iver are acu tely w orn. W e know A bout 8% track pre- tension is r ight and the high- speed T racked V eh ic le s' v ibration p icks up by the increase of the track pre - tension. KEYW ORDS: T racked vehicle; T rack; Sim ulation; Dynam ic tension; R ide qua lity
预张紧力
6%
8%
10% 12% 14%
34940 10740
45780 10680
57040 11730
66090 11680
67060 12180
36553 47009 58234 67114 68157
图 6 驾驶员处纵向振动加速度有效值
图 4 驾驶员处垂直振动加速度有效值
紧力的方差较小, 说明履带动 张紧力在 8% 的履带预张 紧力时 的有效 变化范 围较小, 如果 按照 u- 3 为履带 动张紧 力的有 效范 围的最 小值, 6% 的履 带 预 张 紧 力 时 履带 动 张 紧 力 最 小 值 为 2720N (车 重 的 0. 52% ), 由于履带最小张紧力出现在主动轮 处的上支端, 对于 该履带车辆, 上支端 振幅较 大, 如果 此时履 带车 辆非 直线行 驶时, 在侧向力的作用下很容易在主 动轮处脱带, 8% 的履带 预张 紧 力 时 履 带 动 张 紧 力 最 小 值 为 105300 ( 车 重 的 2. 65% )。从减小履带 脱带的 概率 来看, 履带 预张 紧力 越大越 好; 从减小履 带磨 损来 看, 显 然履 带 预张 紧力 越 小越 好, 因 此, 该履带车履带预张紧力取 8% 左右较合适, 这与该车实际 取车重的 7. 7% 作为履带预张紧力较吻合。
图 3 驾驶员处垂直方向振动加速度
表 1 驾驶员处垂直方向振动加速度
统计量
平均值 ( m / s2 ) 标均差 ( m / s2 ) 有效值 ( m / s2 )
预张紧力
6%
8%
10% 12% 14%
0. 0001 - 0. 0129- 0. 0115 - 0. 0074 - 0. 0121
0. 9881 1. 075 1. 141 1. 187 1. 211
0. 158 0. 1649 0. 1759 0. 181 0. 1897
有效值 ( m / s2 ) 0. 158 0. 165 0. 176 0. 181 0. 190
表 4 俯仰角加速度
统计量
预张紧力
6%
8%
10% 12% 14%
平均值 ( rad / s2 ) - 0. 0069 - 0. 037 - 0. 0826 - 0. 1355 - 0. 1893
1. 206 1. 254 1. 261
1. 218 1. 266 1. 273
14% 0. 1807 1. 276 1. 289
表 3 驾驶员处纵向振动加速度
统计量
平均值 ( m / s2 ) 标均差 ( m / s2 )
预张紧力
6%
8%
10% 12% 14%
- 0. 0009 - 0. 004 - 0. 01 - 0. 01 - 0. 004
E ffect of T rack P re- tension on the R ide Quality of H igh- speed T racked V ehicle
X IAO Y ong- ka,i L I X iao- lei
( Schoo l ofM echanism and V eh ic le T ransportation Eng ineer ing, Be ijing Institute of T echnology, Beijing 100081, Ch ina)
标均差 ( rad / s2 ) 0. 4303 0. 4377 0. 4452 0. 4669 0. 4902
有效值 ( rad / s2 ) 0. 4304 0. 4393 0. 4528 0. 4862 0. 5245
统计量
平均值 u( N) 标均差 (N ) 有效值 ( N)
表 5 履带动张紧力
第 23卷 第 7期 文章编号: 1006 - 9348( 2006) 07 - 0253- 03
计算机仿真
2006年 7月
高速履带车辆履带预紧张力对平顺性的影响
肖永开, 李晓雷
( 北京理工大学机械与车辆工程学院, 北京 100081)
摘要: 高速履带车辆的机动性、平顺性和可靠性研究是高速履带车辆机动性研究的重要内容。目前在理论分析中, 通常不考 虑履带预张紧力对车辆平顺性的影响, 在工程实际中履带预张紧力常根据使用经验来确定, 也不考虑对车辆平顺 性的影响。 因此, 履带预张紧力对高速履带车辆的平顺性的影响不得而知。该文 应用多刚 体动力学 软件 R ecurD yn建立 了某高速 履带 车辆的非线性实体模型、路面模型和履带模型。在同一车速、相同路面下, 分别以 6% 、8% 、10% 、12% 和 14% 的履 带预张紧 力进行了车辆行驶仿真计算。履带预紧力太小, 履带容易脱带, 履带预张紧 力太大, 履带和主 动轮磨损剧 烈, 通过对计 算结 果比较分析, 该高速履带车履带预张紧力取 8% 左右较为合适, 而且随着履带预张紧力的增加, 高速履带车辆振动加剧。 关键词: 履带车辆; 履带; 仿真; 动态张紧力; 平顺性 中图分类号: TP391. 9 文献标识码: A