基于内模控制的PID控制器在大时滞过程中的应用研究
时滞系统PID控制器内模整定方法的扩展
ZN : K c = 0. 91; T i = 2. 75; T d = 0. 68。CC: K c = 0. 91; T i = 3. 03; T d = 0. 53。
图 3 P ID 控制器整定公式比较 (Η= 0. 2) 图 4 P ID 控制器整定公式比较 (Η= 2)
根据图 3 和图 4 的比较结果, 对于一阶加时滞系统采用 P ID 控制器, 使用本文提出的参数 整定方法, 其优越性是明显的。
摘 要 基于内模控制 ( IM C) 的 P ID 控制器设计方法只有一个整定参数, 其整定参数直接与闭 环响应速度和控制回路的鲁棒性有关。 对于时滞系统, 如果使用非对称的二阶 Pade 近似代替, 则能导出一个简单的二阶控制器形式, 而不会使控制器变得复杂, 并且模型匹配和控制器整定 将获得有意义的改善, 特别是对时滞较大的系统。 关键词 P ID 控制器参数整定, 内模控制, 非对称 Pade 近似 分类号 T P13
数无量纲时滞时间; Κ Η则是决定闭环系Η T 和N 之间的关系, 可以图形的方式给出, 如图 2 所示。其中,
噪声滤波器系数N 取 3, 5 和 10。
通过方程 (6) 和图 2 可以得到以下几点: 1) 当 Η T → ∞ 时, Κ Η= Χ2 ∆= 0. 3225; 2) 当N
1998年
关于扩展内模整定方法, 可以得到如下几点结论: 1) 对于一阶加纯滞后系统, 不需要选择滤波器参数
Κ, 而是通过给定的 N 值由方程 (6) 给出。对于不同的系 统或不同的控制要求, 可考虑适当地修正参数 Χ1, Χ2 和 ∆。
2) 由方程 (4) 和 (5) 看到, 对于一阶加纯滞后系统, 扩展内模整定方法设计的 P ID 控制器无需前置滤波器。
根据内模基本知识的PID控制控制控制控制器参数整定仿真实验

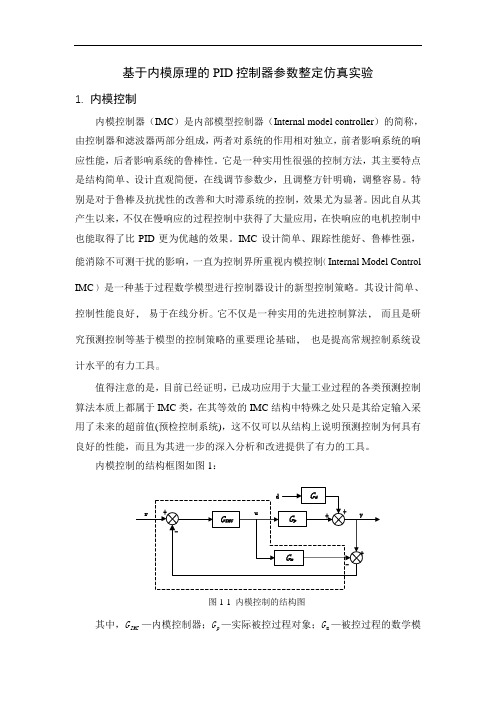
基于内模原理的PID控制器参数整定仿真实验1.内模控制内模控制器(IMC)是内部模型控制器(Internal model controller)的简称,由控制器和滤波器两部分组成,两者对系统的作用相对独立,前者影响系统的响应性能,后者影响系统的鲁棒性。
它是一种实用性很强的控制方法,其主要特点是结构简单、设计直观简便,在线调节参数少,且调整方针明确,调整容易。
特别是对于鲁棒及抗扰性的改善和大时滞系统的控制,效果尤为显著。
因此自从其产生以来,不仅在慢响应的过程控制中获得了大量应用,在快响应的电机控制中也能取得了比PID更为优越的效果。
IMC设计简单、跟踪性能好、鲁棒性强,能消除不可测干扰的影响,一直为控制界所重视内模控制( Internal Model Control IMC ) 是一种基于过程数学模型进行控制器设计的新型控制策略。
其设计简单、控制性能良好,易于在线分析。
它不仅是一种实用的先进控制算法,而且是研究预测控制等基于模型的控制策略的重要理论基础,也是提高常规控制系统设计水平的有力工具。
值得注意的是,目前已经证明,已成功应用于大量工业过程的各类预测控制算法本质上都属于IMC类,在其等效的IMC结构中特殊之处只是其给定输入采用了未来的超前值(预检控制系统),这不仅可以从结构上说明预测控制为何具有良好的性能,而且为其进一步的深入分析和改进提供了有力的工具。
内模控制的结构框图如图1:图1-1 内模控制的结构图其中,IMC G —内模控制器;p G —实际被控过程对象;m G —被控过程的数学模型; d G —扰动通道传递函数。
(1)当0)(,0)(≠=s G s R d 时,假若模型准确,即)()(s G s G m p =,由图可知,)]()(1)[()]()(1)[()(IMC IMC s G s G s G s G s G s G s Y m d d -=-=p ,假若“模型可倒”,即)(1s G m 可以实现,则可令)(1)(IMC s G s G m =,可得0)(=s Y ,不管)(s G d 如何变化,对)(s Y 的影响为零。
一种时滞过程内模PID控制器鲁棒整定方法
一种时滞过程内模PID控制器鲁棒整定方法
赵志诚;刘志远;张井岗
【期刊名称】《信息与控制》
【年(卷),期】2010(39)5
【摘要】针对典型的一阶时滞(FOPTD)、二阶时滞(SOPTD)以及一阶时滞积分(FODI)过程,提出了一种简便的内模PID控制器设计和参数整定方法.利用一阶泰勒级数逼近系统模型的时滞项,导出内模PID控制器参数表达式,且仅有一个可调参数β,该可调参数与系统的动态性能和鲁棒性直接相关.基于控制系统的鲁棒性能指标给出了控制器可调参数β进行鲁棒整定的解析表达式.仿真结果表明,该方法可使系统同时获得良好的设定值跟踪特性、扰动抑制特性和克服参数变化的鲁棒性.【总页数】5页(P526-530)
【关键词】时滞过程;内模PID;鲁棒性
【作者】赵志诚;刘志远;张井岗
【作者单位】哈尔滨工业大学控制科学与工程系;太原科技大学电子信息工程学院【正文语种】中文
【中图分类】TP273
【相关文献】
1.基于误差性能指标的强时变时滞系统鲁棒PID继电自整定控制技术 [J], 沈国江;孙优贤;马婷芳
2.时滞光电跟踪系统鲁棒内模PID控制器设计 [J], 赵志诚;刘志远;张井岗
3.强时变时滞系统的鲁棒PID继电自整定控制技术 [J], 沈国江;刘翔;孔亚广;孙优贤
4.基于最大灵敏度的串级时滞过程控制器鲁棒整定 [J], 马文廷;张井岗;赵志诚
5.时滞系统PID控制器内模整定方法的扩展 [J], 龚晓峰;高衿畅;周春晖
因版权原因,仅展示原文概要,查看原文内容请购买。
不稳定大时滞过程的串级PID控制
第1 O卷 第 6 期
20 年 1 月 06 1
电 机 与 控 制 学 报
ELECTRI MACI I C t NES AND CONTROL
V i1 N . 0. 0 o6 N v 20 o. 06
不 稳 定 大 时 滞 过 程 的 串级 P D 控 制 I
L a,HOU h s n IHu Ya —o g
( oeeo u mao n l tcl nier g a zo i t gU i  ̄i ,azo 3 0 0 C ia C lg f t t nadEe r a E g e n ,LnhuJ o n nv t L nhu7 0 7 , hn ) l A o i ci n i ao e y
பைடு நூலகம்
Ab ta t A c s a e P D c n r l t cu e b s d o h a wo k o t r a d l o t l S it d c d sr c : a c d I o t r t r a e n t e f me r fi e n l o su r n mo e c n r i n r u e o o fra c a s o n tb e p o e swi a g i e a . S me r l so a a tr d sg r i e .T e t o ls fu sa l r c s t l r e t h me d ly o u e f r mee e in a e gv n p h wo c nr l r w i h a e d sg e c o d n h r cp e o o t l s h c r e in d a c r ig t t e p i i l fI r f l si a e d a k c n ol r t t oe o n MC a eo a sc l e b c o t l r — c f r e su
基于内模PID控制器的时延网络控制系统的保稳定性设计

S a ii De i n o l y Ne wo k nt o y t m s d o I t r a o e t b l y sg fDe a t r Co r l s e Ba e n n e n l t S M dl Co t o —PI Co r l r n r l - D nt o l e
ZHAo o Ca, ANG o Yi Gu - i Wr Ha -
( c o l f lc ia a d nrl n ier g La nn e h ia U iesy Huu a 2 5 C ia S h o o etc t gn ei , i igT c ncl nv ri , ld o15 , hn ) E r l n Co o E n o t 1 0
计 算 机 系 统 应 用
2 1 年 第 1 卷 第 8期 0 0 9
基于 内模 P 制器 的时延 网络控 制系统 的 I D控
保 稳定性设计①
赵 国材
摘
王昊轶 ( 辽宁工程技术大学 电气与控制工程学院 辽 宁 葫芦岛 1 5 5 1 ) 2 0
要 : 网络控 制 系统中存在的随机时延会 导致 系统的性能变差甚 至不稳定 。通过对随机 时延 的分析 ,建立 了
s l epr b e te c n r le a e n I C- D rn i l sd sg e o es c n — r e y t m. e ovet o lm,h o to lrb s d o M h PI p i cp ei e in df rt e o d o d rs se Th h
内模控制在过程控制系统中的应用研究
c,(B)=黼“ 辨识”],得到上水箱液位对象的数学模型为: ^f (g)
∞,2靠 图2瑚c结构等效变换为经典控制结构
等,=揣 类似地,图2中的输人输出关系可以表达为: ㈣
器2丽丢丽
(3)
所阻,系统的闭环响应为:
2007年第12期 文章编号:1006—2475(2007)12.0049—03
计算机与现代化 J王sUANJI YU XIANnAIHUA
总第148期
内模控制在过程控制系统中的应用研究
杨大勇
南昌大学环境科学与工程学院,江西南昌330031)
摘要:内模控制是一种简单、宾用的先进控制算法,是研究其它基于模型的控制蕈略的理论基础。本文介绍了内棰控制
3结束语
本文介绍了内模控制器的基本原理和设计方法,
参考文献:
Cl】GT帅h“i^cⅢEⅫ,M%∞dlrhi[MJ.】h咖.dmhol捌d.a呷E耐%.cmh吲enng№廿
D曙.1粥2.21(2);3∞0∞. [2】王树青.等.先进控制技术及其应用[M】.北京:科学出
腹社,2001.
[3]高东杰,谭杰林,红权.应用先进控制技术[M],北京:国 防工业出版社.2003. 赵曜.内模控制发展综述[J】.信息与控制,2000,凹 (6):526{31.
用模拟硬件或计算机软件来实现,该结构中除了有控 制器G眦以外,还包含了过程模型cP。为了求取图l 中输人r和d与过程输出y之间的传递函数,可以将 图1等价变换为图2所示的简单反馈控制系统形式, 即IMc的等价结构。
这样对于图2中的内环反馈控制器有
收稿日期:2006.1140 作者简介:杨大勇(1978.).男.安徽怀远人。南昌大学环境科学与工程学院讲师,博士研究生,研究方向:先进过程控制技术 与应用。
基于内模原理的PID控制器参数整定仿真实验
基于内模原理的PID 控制器参数整定仿真实验1. 内模控制内模控制器(IMC )是内部模型控制器(Internal model controller )的简称,由控制器和滤波器两部分组成,两者对系统的作用相对独立,前者影响系统的响应性能,后者影响系统的鲁棒性。
它是一种实用性很强的控制方法,其主要特点是结构简单、设计直观简便,在线调节参数少,且调整方针明确,调整容易。
特别是对于鲁棒及抗扰性的改善和大时滞系统的控制,效果尤为显著。
因此自从其产生以来,不仅在慢响应的过程控制中获得了大量应用,在快响应的电机控制中也能取得了比PID 更为优越的效果。
IMC 设计简单、跟踪性能好、鲁棒性强,能消除不可测干扰的影响,一直为控制界所重视内模控制( Internal Model Control IMC ) 是一种基于过程数学模型进行控制器设计的新型控制策略。
其设计简单、控制性能良好, 易于在线分析。
它不仅是一种实用的先进控制算法, 而且是研究预测控制等基于模型的控制策略的重要理论基础, 也是提高常规控制系统设计水平的有力工具。
值得注意的是,目前已经证明,已成功应用于大量工业过程的各类预测控制算法本质上都属于IMC 类,在其等效的IMC 结构中特殊之处只是其给定输入采用了未来的超前值(预检控制系统),这不仅可以从结构上说明预测控制为何具有良好的性能,而且为其进一步的深入分析和改进提供了有力的工具。
内模控制的结构框图如图1:图1-1 内模控制的结构图其中,IMC G —内模控制器;p G —实际被控过程对象;m G —被控过程的数学模型; d G —扰动通道传递函数。
(1)当0)(,0)(≠=s G s R d 时,假若模型准确,即)()(s G s G m p =,由图可知,)]()(1)[()]()(1)[()(IMC IMC s G s G s G s G s G s G s Y m d d -=-=p ,假若“模型可倒”,即)(1s G m 可以实现,则可令)(1)(IMC s G s G m =,可得0)(=s Y ,不管)(s G d 如何变化,对)(s Y 的影响为零。
时滞多变量内模控制方法的研究的开题报告
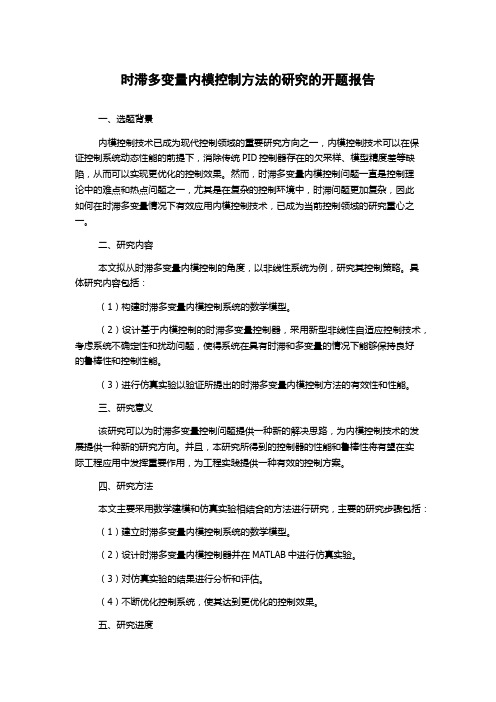
时滞多变量内模控制方法的研究的开题报告一、选题背景内模控制技术已成为现代控制领域的重要研究方向之一,内模控制技术可以在保证控制系统动态性能的前提下,消除传统PID控制器存在的欠采样、模型精度差等缺陷,从而可以实现更优化的控制效果。
然而,时滞多变量内模控制问题一直是控制理论中的难点和热点问题之一,尤其是在复杂的控制环境中,时滞问题更加复杂,因此如何在时滞多变量情况下有效应用内模控制技术,已成为当前控制领域的研究重心之一。
二、研究内容本文拟从时滞多变量内模控制的角度,以非线性系统为例,研究其控制策略。
具体研究内容包括:(1)构建时滞多变量内模控制系统的数学模型。
(2)设计基于内模控制的时滞多变量控制器,采用新型非线性自适应控制技术,考虑系统不确定性和扰动问题,使得系统在具有时滞和多变量的情况下能够保持良好的鲁棒性和控制性能。
(3)进行仿真实验以验证所提出的时滞多变量内模控制方法的有效性和性能。
三、研究意义该研究可以为时滞多变量控制问题提供一种新的解决思路,为内模控制技术的发展提供一种新的研究方向。
并且,本研究所得到的控制器的性能和鲁棒性将有望在实际工程应用中发挥重要作用,为工程实践提供一种有效的控制方案。
四、研究方法本文主要采用数学建模和仿真实验相结合的方法进行研究,主要的研究步骤包括:(1)建立时滞多变量内模控制系统的数学模型。
(2)设计时滞多变量内模控制器并在MATLAB中进行仿真实验。
(3)对仿真实验的结果进行分析和评估。
(4)不断优化控制系统,使其达到更优化的控制效果。
五、研究进度目前,已初步完成了系统的数学建模工作以及控制方案的初步设计,正在进行仿真实验的准备工作。
预计在6月底完成仿真实验,并进行数据分析和结果评估。
随后将进一步完善控制系统,以期达到更优的控制效果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于内模控制的PID 控制器在大时滞过程中的应用研究陶睿,肖术骏,王秀,朱学峰(华南理工大学自动化科学与工程学院,广州,510640)摘要:基于内模控制的PID 控制器,只有一个可调参数,且该参数直接与系统的闭环响应速度和回路的鲁棒性有关,克服了常规PID 控制参数整定复杂的缺点,易于为工程技术人员所掌握。
城市供水出水浊度过程是一个大惯性、大时滞、非线性、时变以及随机干扰多的难控对象。
而把IMC-PID 控制器应用在该对象上,仿真结果表明可以取得较理想的控制效果。
关键字:浊度控制; 大时滞过程; 内模控制; PID 控制; 中图分类号:TP273The Study on PID Controller Based on Internal Model Control in the Applications of LargeTime Delay SystemTAO Rui, XIAO Shujun, WANG Xiu, ZHU Xuefeng(S outh China University of Technology, College of Automation Science and Engineering,Guangzhou, Guangdong, 510640)Abstract: PID controller which based on internal model control can set the system using only one adjustable parameter. And the parameter direct related to the response speed of closed loop and the robustness of loop. It is better to conventional PID controller in noise immunity and complexity.The MIC-PID controller can greatly improve the control results and be easy to control by the engineers and technicians. The turbidity control system of municipal water supply system is a non-linear and time-variant process with a large time constant and large dead time ,which is always difficult to control. When adding the MIC-PID controller to it can obtain a better control effect.Key words: Turbidity control; Large time delay system; Internal model control; PID controller;1 引言 在现代工业过程的控制中,PID 控制算法的到了广泛的应用。
但是,常规的PID 控制在对大惯性大时滞系统的控制时,表现的控制效果并不理想,并且参数整定复杂,不利于对工业过程对象的控制。
特别是对于自来水厂的浊度控制,效果并不理想。
Rivera 等人首先将内模控制的思想引入到PID 控制器的设计中,并建立了滤波器参数与PID 控制器参数的关系。
------------------------------------------------------------------基金项目:广东省科技计划项目(2005B10201005) 2007佛山市禅城区产学研项目(2007B1038)文章把IMC-PID 控制引入到大惯性大时滞的城市供水系统中,克服了因难控过程混凝沉淀工序而带来的水质受损,具有较高的使用价值。
2 内模控制 2.1 内模原理[1][6]内模控制的基本结构如图1所示,图中P G 为实际被控对象,M G 为被控对象的数学模型,为内模控制器。
IMC G图1 内模控制器结构图图 图中,等价的反馈控制器为,()()1()(IMC c M IMC G s G s G s G s =−)(1)而图中系统的闭环响应为()()[1()()]()()1()[()()]P IM C IM C M IM C P M G s G r s G s G s d s y s G s G s G s +−=+−可见,当模型匹配时(即P G =M G ),且没有外界干扰(即d=0),此时系统的反馈信号为零,闭环系统的输入传递函数只由内模控制的结构的前向通道决定。
并且当M 1(s)=G s IMC G ()时,系统的输出无静差。
2.2 内模控制设计步骤[3-6]第一步:模型分解,即把M G 分解为M G −,两部分,+M G -=*+M M M G G G (2)其中是一个全通滤波器传递函数,有+M G j =1 M G ωω∀(),+ (3) 它包括了所有时滞环节和有半平面的零点;M G −是具有最小相位特性的传递函数,它稳定且不包含预测项。
第二步:定义IMC 控制器,(4)1*IMC M G G −−=f 其中f 是一个低通滤波器,其形式为,1()(1)rf s s λ=+ (5) 式中阶次r 取决于M G −的阶次使控制可实现,λ为滤波时间常数。
将(4)式代入(1)式可得()M s =1C rM G G S G λ++−-1-()(6)第三步:在工业控制中,经常采用不完全微分PID 控制算法,其控制器具有如下形式1()(11d c c i f T s G s K T s T s =+++ (7) 比较(6)(7),就可以得到IMC-PID 控制器的各参数, 0.5*()f c T T K K τλτ+−=+ (8)0.5i T T T f τ=+− (9) 0.5d i T T T f T τ=− (10) 0.5f T λτλτ=+ (11)3 IMC-PID 控制器在自来水厂浊度控制中的仿真研究控制自来水厂的出水浊度是保证水厂水质量的关键。
在此,采用IMC-PID 控制器对其进行控制仿真研究。
3.1 自来水厂常规处理工艺流程简述原水经泵房抽入水厂进水管道,将配制好的混凝剂矾液加入进水主管道,与原水混合后流入沉淀池,矾液在水中流动扩散形成矾花,将水中的胶体微粒和杂质等悬浮物凝聚沉淀,以降低水的混浊度,提高水质。
该过程是一个复杂的物理化学反应过程。
整个制水过程具有非线性、时变性、大时滞性等复杂特点,传统的PID 控制器难以取得令人满意的控制效果[2][4]。
3.2 被控对象描述在大多数工业过程中,对象模型都可以用一阶惯性加纯滞后对象来表示,即()1sK G s e Ts τ−=+, (12)城市供水出水浊度控制过程是一个大惯性、大时滞、非线性时变系统,但在工作点,它也可以近似为(12)所示的模型形式。
在广东省某自来水厂,采用阶跃响应法得到被控对象的响应曲线并测得被控对象的传递函数为:260.902()521sp G s e s −=+ (13)其中,时间常数和滞后时间的单位是分钟。
过程的放大倍数K 的单位是:(待滤水浊度的变化)/(控制量的变化)。
对于纯滞后环节通常采用三种方法进行近似:一阶pade 近似,二阶对称pade 近似,二阶非对称pade 近似。
对于大惯性大时滞系统,通过仿真研究表明,一阶近似和二阶近似区别很小,因此,为简化IMC-PID 控制器的设计,在此采用一阶pade 近似法[7],即,(10.5)(10.5)ss es τττ−−≈+ (14)按照如上所述的内模控制的设计步骤,就很容易得到自来水厂系统控制的整定参数。
据此,可以通过调节滤波时间常数λ的值,来对该对象进行控制。
4 仿真实验为了展示IMC-PID 控制器的效果,用Matlab 软件对自来水厂出水浊度进行了控制仿真研究,并把IMC-PID 控制算法与目前较流行的PID 控制器的Lopez 整定法,Cohen-Coon 整定法进行了比较,结果如下。
图2—4所示的是,当模型不匹配时,即K 、T 、τ分别30%时的MIC-PID 控制效果比较图(取±λ=τ)。
又根据经验知,一般在工程中,当K 增大、T 减小、τ增大(在本文中取τ=34 ,T 减小30% ,K 增大30%)是最难控制的。
图5给出了该情况下的内模控制效果图,其中λ=2.0τ---3.0τ。
可见,当系统的模型不匹配时,通过调节λ=2.5τ时,可以到较好的控制效果。
图2 K 变化±30%时,控制系统的效果图T 1.3T 0.7T图3 T 变化±30%时,控制系统的效果图Tau=26 Tau=34 Tau=18图4 τ变化±30%时,控制系统的效果图图5 K 增大、T 减小、τ增大时的控制效果 (λ=2.0τ---3.0τ,τ=34 T 减小30% K增大30%)(图中N=λ/τ)在下面图6中,分别采用IMC-PID 法和Lopez 整定法,Cohen-Coon 整定法对该系统进行了控制,得到了控制效果的比较图。
并且在仿真时发现,在上述图5所述的模型不匹配的情况时,基于MIC-PID 控制器整定法,可以通过调节λ=2.5τ时,可以到较好的控制效果。
而Lopez 整定法和Cohen-Coon 整定法[8]控制效果极差,已经是发散的了。
图6 三种方法的比较(IMC-PID 控制中λ=τ)5 结论从IMC-PID 控制在浊度控制的仿真结果可见,该算法需要在线调整的参数少(只有一个滤波时间常数λ),控制算法比较简单,易于为工程技术人员掌握。
在系统受到扰动的情况下,也有较强的抗干扰能力。
其控制效果明显优于Cohen-Coon 整定法和Lopez 整定法。
初步的仿真研究表明,将IMC-PID 用于像自来水厂出水浊度这种大惯性大时滞的工业对象,具有一定的潜在应用价值。
参考文献:[1] D E Rivera, M Morari, and S Skogestad.Internal model control---4.PID controller design [J]. Ind.Eng.Chem.Pro.Des.Dev., 1986,25.252-265N=2.5 [2] 郭佩佩 .基于BP 神经网络的水厂加药凝絮过程辨识研究[J]. 计算机与应用化学2008 25(7) 889~992N=3.0 N=2.0[3] 严兴华等 IMC-PID 在大惯性大滞后系统中的应用及仿真[J].广东有色金属学报 2006.16(3):217~220[4] 王伟,甘艳珍,刘桂香,朱学峰.MFA 与PID控制器的实验比较研究[J].自动化仪表. 2008.29(5):27~29[5] 刘红军等 基于内模控制的PID 控制器的设计[J].计算机仿真 2004.22(3):207~210[6] 黄静 潘立登,基于内模控制的PID 控制系统的研究与应用(D ).北京:北京化工大学 2006[7] 刘金琨.先进PID 控制及其MATLAB 仿真(第二版)[M].北京:电子工业出版社.2004 MIC-PID 整定法 Lopez 整定法 Cohen-Coon 整定[8] 何衍庆,俞金寿,蒋慰孙. 工业生产过程控制[M],北京:化学工业出版社, 2004。