arduino三自由度机械臂
机械毕业设计1276三自由度机械手运动学可视化求解研究

第1章绪论1.1课题研究背景虚拟仪器软件Labview在运动计算方面的研究起步较晚,在很多高端技术甚至低端技术领域都没有自己的研发设计知识产权。
但伴随着我国国民经济的持续快速发展以及不断地加大这方面的投入,加快了虚拟控制在机械运动技术方向的升级步伐,得以在机械手运动分析、教学机器人运动控制等方面以极高的速度在国内发展,为机械手运动控制及分析的普及奠定了良好的基础。
因此在虚拟运动学研究分析领域存在巨大的发展潜力。
利用虚拟仪器软件在机械手运动方面国外发展的是比较早的,虚拟控制机械手运动融合了计算机强大的硬件资源,突破了传统控制仪器在数据处理、分析、显示、等方面的限制,大大增强了虚拟仪器在不同方面及领域的功能。
图形化语言能够实现系统简单,构建灵活,层次体系明晰等特点。
利用它可以方便的建立自己所需的各种界面,其图形化的界面使得编程及使用过程都生动有趣。
使用图形化语言编程时,不用写编程代码,取而代之的是流程图。
从而能够大大降低了工作的时间和难度。
利用计算机丰富的软件资源,现在已经实现了部分仪器硬件的软件化,节省了物质资源,增加了系统的灵活性;通过软件技术和相应的数值算法,实时,直接的对测试数据进行各种分析与处理;通过图形用户界面技术,真正做到界面友好,人机交互。
虚拟仪器软件具有开放性,模块化,可重复使用及互换性等特点。
用户根据自己的需要,选用软件中的各种模块进行自己所需要的运动分析采集等功能,使仪器系统的适用范围更为灵活,覆盖面更广,缩短了系统组建时间。
作为现代运动分析控制的发展方向,虚拟控制已迅速发展成为一种新的产业。
1.2 机械手运动学可视化求解研究的目的和意义机械手可视化技术的研究可以帮助学习对机器人运动学的深入了解,减少分析和学习的时间,更快的理解机械手运动学的基本内容和研究难点,正逆运动学求解的可视化算法主要是通过数值计算的方法快速的对任意结构的三自由度机械手进行求解,并将求解结果可视化,有效的判断正逆解的合理性,同时为机器人运动学的学习提供了辅助工具。
三自由度机械手臂

辽宁工程技术大学科技方法训练论文题目基于PLC的三自由度机械手控制系统设计院(系、部)机械工程学院班级机电08-3班姓名指导教师日期2012.01.01基于PLC的三自由度机械手控制系统设计姓名和指导老师学校E-mail:摘要:伴随着机电一体化在各个领域的应用,机械设备的自动控制成分显得越来越重要,由于工作的需要,人们经常受到高温、腐蚀及有毒气体等因素的危害,增加了工人的劳动强度,甚至于危机生命。
因此机械手就在这样诞生了,机械手是工业机器人系统中传统的任务执行机构,是机器人的关键部件之一。
其中的工业机械手是近代自动控制领域中出现的一项新技术,它的发展是由于其积极作用正日益为人们所认识:它能部分地代替人工操作;能按照生产工艺的要求,遵循一定的程序、时间和位置来完成工件的传送和装卸;能制作必要的机具进行焊接和装配从而大大改善工人的劳动条件,显著地提高劳动生产率,加快实现工业生产机械化和自动化的步伐为了提高机械手在工业生产中定位的精度,介绍一种基于PLC的三自由度机械手控制系统设计方案。
方案中提出了步进电机在机械手定位应用中的一种新思路,详细论述三自由度机械手控制系统的硬件结构及软件实现方法,并建立M("GS组态环境界面对系统的运行进行监控。
测试结果表明,该系统运行稳定,定位精确,具有较高的应用价值。
关键词:PLC;三自由度;机械手;步进电机;MCGS组态环境Abstract: as the electromechanical integration in various fields of applications, machinery and equipment to be automatic control component is becoming more and more important, because the job needs, people are often high temperature, corrosion and poisonous gas of the factors such as harm, increased the labor intensity, and even life-threatening. So in this manipulator, was born in the system of industrial robot manipulator is the task of traditional executive mechanism, and is one of the key components of the robot. One of the industrial manipulator is modern automatic control field appeared in a new technology, the development of it is due to its positive role is increasingly been recognized: it can partly replace artificial operation; According to the production requirements, follow a certain procedure, time and location to complete the transfer and loading and unloading; Can make the necessary tools to carry out welding and assembly thereby greatly improve the labor conditions, significantly improve labor productivity and the realization of the industrial production mechanization and automation pace in order to improve the manipulator in industrial production in the precision of the positioning, introduces a kind of threedegrees of freedom manipulator based on PLC control system design scheme. Scheme has been proposed in the stepping motor of the application of the manipulator positioning a new way of thinking, detailed three dof robot control system discussed the hardware structure and the software realization method, and establish the M (" GS configuration environment interface to the operation of the system monitor. Test results show that the system is stable, the precise position, has a high application value.Keywords: PLC; Three degrees of freedom; Manipulator; Stepping motor; MCGS environment引言机械手是一种能模拟人的手臂动作,按照设定程序、轨迹和要求,代替人手进行抓取、搬运工件或操持工具的机电一体化自动装置。
三自由度机械臂设计

三自由度机械手臂设计姓名:苏文杰班级:机自4班学号:24121901188 序号:242015年6月3日三自由度机械手臂设计用途:在当今大规模制造业中,企业为提高生产效率,保障产品质量,普遍重视生产过程的自动化程度,工业机器人作为自动化生产线上的重要成员,逐渐被企业所认同并采用。
工业机器人的技术水平和应用程度在一定程度上反映了一个国家工业自动化的水平,目前,工业机器人主要承担着焊接、喷涂、搬运以及堆垛等重复性并且劳动强度极大的工作,工作方式一般采取示教再现的方式。
本文将设计一台四自由度的工业机器人,用于给冲压设备运送物料。
首先,本文将设计机器人的底座、大臂、小臂和机械手的结构,然后选择合适的传动方式、驱动方式,搭建机器人的结构平台;在此基础上,本文将设计该机器人的控制系统,包括数据采集卡和伺服放大器的选择、反馈方式和反馈元件的选择、端子板电路的设计以及控制软件的设计,重点加强控制软件的可靠性和机器人运行过程的安全性,最终实现的目标包括:关节的伺服控制和制动问题、实时监测机器人的各个关节的运动情况、机器人的示教编程和在线修改程序、设置参考点和回参考点。
该设计的目的是为了设计一台物料搬运机器人,利用现有已经报废的焊接机器人,本文的中结构设计主要偏向于对原有机构的改造和机械手的设计。
动力源采用电源驱动方式该机器人一共具有四个独立的转动关节,连同末端机械手的运动,共需要五个动力源。
机器人常用的驱动方式有液压驱动、气压驱动和电机驱动三种类型。
机器人驱动系统各有其优缺点,通常对机器人的驱动系统的要求有:1).驱动系统的质量尽可能要轻,单位质量的输出功率要高,效率也要高;2).反应速度要快,即要求力矩质量比和力矩转动惯量比要大,能够进行频繁地起、制动,正、反转切换;3).驱动尽可能灵活,位移偏差和速度偏差要小;4).安全可靠;5).操作和维护方便;6).对环境无污染,噪声要小;7).经济上合理,尤其要尽量减少占地面积。
三自由度机械臂工作原理

三自由度机械臂工作原理
三自由度机械臂是一种具有三个独立自由度的机械系统,它可以通过控制各个自由度的运动,完成各种任务。
三自由度机械臂通常由三个关节连接的装置组成,每个关节可以使机械臂在一个轴向上运动。
这些关节通常是旋转关节,可以使机械臂绕其轴旋转。
每个关节都有自己的电机和传动装置,通过控制电机的转速和方向,可以控制机械臂在各个轴向上的运动。
机械臂的末端通常配备有用于夹取、抓取或操作物体的装置,如夹爪、吸盘或工具。
通过控制机械臂的运动,将末端装置移动到目标位置,就可以完成各种工作任务,如装配、搬运、焊接等。
机械臂的运动控制通常通过计算机系统实现。
计算机可以通过传感器获取机械臂当前的位置和姿态信息,然后根据任务需求,计算出各个关节的运动轨迹和速度,通过控制电机的转速和方向,使机械臂按照计划的轨迹进行运动。
总而言之,三自由度机械臂通过控制各个关节的运动,配合末端装置,完成各种工作任务。
通过计算机系统实现运动控制,可以实现高精度、高效率的操作。
三自由度机械手臂说明
2.2.2机械臂……………………………………………………………6
2.3机械手的设计……………………………………………………………6
2.4驱动方式…………………………………………………………………8
2.5传动方式…………………………………………………………………9
“工业机器人”(Industrial Robot):多数是指程序可变(编)的独立的自动抓取、搬运工件、操作工具的装置(国内称作工业机器人或通用机器人)。
机器人是一种具有人体上肢的部分功能,工作程序固定的自动化装置。机器人具有结构简单、成本低廉、维修容易的优势,但功能较少,适应性较差。目前我国常把具有上述特点的机器人称为专用机器人,而把工业机械人称为通用机器人。
第1章绪论…………………………………………………………………………5
1.1机器人概述………………………………………………………………5
第2章机器人实验平台介绍及机械手的设计……………………………………6
2.1自由度及关节……………………………………………………………6
2.2基座及连杆………………………………………………………………6
SHANDONGUNIVERSITY OF TECHNOLOGY
课程设计说明书
三自由度机械手臂设计
学院:农业工程与食品科学学院
专业:农业机械化及其自动化
学生姓名:赵国0911034036
学生姓名:李继飞0911034030
学生姓名:程小岩0912034039
指导教师:程卫东
2013年1月
摘要
在当今大规模制造业中,企业为提高生产效率,保障产品质量,普遍重视生产过程的自动化程度,工业机器人作为自动化生产线上的重要成员,逐渐被企业所认同并采用。工业机器人的技术水平和应用程度在一定程度上反映了一个国家工业自动化的水平,目前,工业机器人主要承担着焊接、喷涂、搬运以及堆垛等重复性并且劳动强度极大的工作,工作方式一般采取示教Байду номын сангаас现的方式。
三自由度机械臂 几何解法

三自由度机械臂几何解法三自由度机械臂是一种具有三个旋转自由度的机械臂系统,它由三个旋转关节连接而成,每个关节可以绕不同的轴线旋转。
在工业自动化领域,三自由度机械臂广泛应用于装配、焊接、搬运等任务中,它能够完成复杂的三维空间运动。
三自由度机械臂的几何解法是通过解析几何的方法确定机械臂末端执行器的位置和姿态。
具体而言,它包括机械臂的正运动学和逆运动学求解。
1.机械臂的正运动学求解:正运动学求解是指已知机械臂的关节角度,求解机械臂末端执行器的位置和姿态。
在三自由度机械臂中,可以使用联合旋转矩阵(旋转矩阵乘积),将机械臂的三个关节旋转矩阵相乘,得到整体的旋转矩阵。
然后,将这个旋转矩阵与机械臂的长度矩阵相乘,得到末端执行器的位置和姿态。
具体的计算步骤如下:(1)设第i个关节的旋转矩阵为R_i,长度矩阵为D_i。
(2)根据关节角度计算每个关节的旋转矩阵R_1, R_2和R_3。
(3)计算整体的旋转矩阵R = R_1 * R_2 * R_3。
(4)计算末端执行器的位置矩阵p = R * D_3 + R_1 * D_2 + D_1。
通过上述计算,可以得到机械臂末端执行器的位置和姿态。
2.机械臂的逆运动学求解:逆运动学求解是指已知机械臂末端执行器的位置和姿态,求解机械臂的关节角度。
在三自由度机械臂中,可以通过解几何的方法求解关节角度。
具体而言,首先计算机械臂末端执行器的位置矩阵p,然后根据关节角度的限制条件,通过三角函数和反三角函数的计算,求解机械臂的关节角度。
具体的计算步骤如下:(1)设第i个关节的旋转矩阵为R_i,长度矩阵为D_i。
(2)已知末端执行器的位置矩阵p,计算关节3的角度θ3。
(3)已知关节3的角度θ3,通过关节2的位置矩阵计算关节2的角度θ2。
(4)已知关节2的角度θ2和关节3的角度θ3,通过关节1的位置矩阵计算关节1的角度θ1。
通过上述计算,可以得到机械臂的关节角度。
需要注意的是,在实际应用中,机械臂的逆运动学求解通常存在多解或无解的情况。
3个自由度机械手设计

第一章引言机械工业是国民的装备部,是为国民经济提供装备和为人民生活提供耐用消费品的产业。
不论是传统产业,还是新兴产业,都离不开各种各样的机械装备,机械工业所提供装备的性能、质量和成本,对国民经济各部门技术进步和经济效益有很大的和直接的影响。
机械工业的规模和技术水平是衡量国家经济实力和科学技术水平的重要标志。
因此,世界各国都把发展机械工业作为发展本国经济的战略重点之一。
工业机械手是近几十年发展起来的一种高科技自动化生产设备。
工业机械手的是工业机器人的一个重要分支。
它的特点是可通过编程来完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点,尤其体现了人的智能和适应性。
机械手作业的准确性和各种环境中完成作业的能力,在国民经济各领域有着广阔的发展前景。
机械手是在机械化,自动化生产过程中发展起来的一种新型装置。
在现代生产过程中,机械手被广泛的运用于自动生产线中,机械人的研制和生产已成为高技术邻域内,迅速发殿起来的一门新兴的技术,它更加促进了机械手的发展,使得机械手能更好地实现与机械化和自动化的有机结合。
机械手虽然目前还不如人手那样灵活,但它具有能不断重复工作和劳动,不知疲劳,不怕危险,抓举重物的力量比人手力大的特点,因此,机械手已受到许多部门的重视,并越来越广泛地得到了应用。
机械手技术涉及到力学、机械学、电气液压技术、自动控制技术、传感器技术和计算机技术等科学领域,是一门跨学科综合技术。
机械手是一种能自动化定位控制并可重新编程序以变动的多功能机器,它有多个自由度,可用来搬运物体以完成在各个不同环境中工作。
1.1 机械手的分类机械手一般分为三类:第一类是不需要人工操作的通用机械手。
它是一种独立的不附属于某一主机的装置。
它可以根据任务的需要编制程序,以完成各项规定的操作。
它的特点是具备普通机械的性能之外,还具备通用机械、记忆智能的三元机械。
第二类是需要人工才做的,称为操作机。
它起源于原子、军事工业,先是通过操作机来完成特定的作业,后来发展到用无线电讯号操作机来进行探测月球等。
3自由度的机械手控制器设计原理
3自由度的机械手控制器设计原理本章节主要讲述该项目的设计原理以及项目涉及到的键盘模块,数据模块,音乐播放模块,舵机模块,LED显示模块的设计过程以及原理。
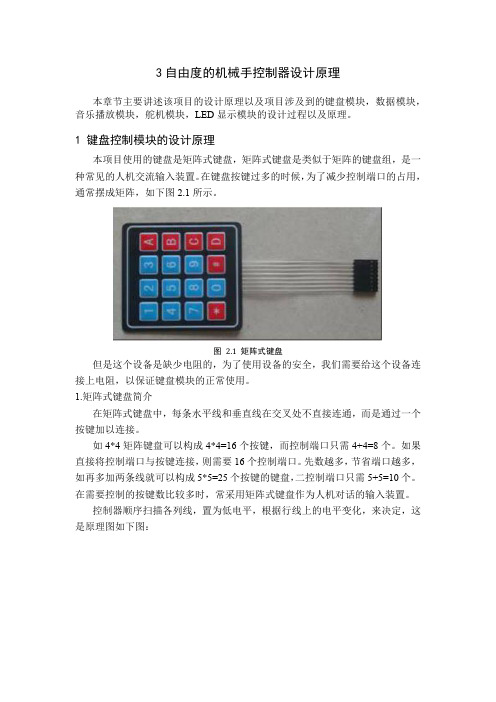
1 键盘控制模块的设计原理本项目使用的键盘是矩阵式键盘,矩阵式键盘是类似于矩阵的键盘组,是一种常见的人机交流输入装置。
在键盘按键过多的时候,为了减少控制端口的占用,通常摆成矩阵,如下图2.1所示。
图 2.1 矩阵式键盘但是这个设备是缺少电阻的,为了使用设备的安全,我们需要给这个设备连接上电阻,以保证键盘模块的正常使用。
1.矩阵式键盘简介在矩阵式键盘中,每条水平线和垂直线在交叉处不直接连通,而是通过一个按键加以连接。
如4*4矩阵键盘可以构成4*4=16个按键,而控制端口只需4+4=8个。
如果直接将控制端口与按键连接,则需要16个控制端口。
先数越多,节省端口越多,如再多加两条线就可以构成5*5=25个按键的键盘,二控制端口只需5+5=10个。
在需要控制的按键数比较多时,常采用矩阵式键盘作为人机对话的输入装置。
控制器顺序扫描各列线,置为低电平,根据行线上的电平变化,来决定,这是原理图如下图:图2.2 键盘模块原理2 矩阵式键盘控制器的功能4*4矩阵式键盘是本项目的输入设备,是实现与系统交互信息的窗口。
要使用矩阵式键盘正常工作,需要设计矩阵式键盘控制器模块,根据设计任务要求,矩阵式键盘控制器模块功能如下输出4*4矩阵式键盘正常工作所需要的列扫描信号。
接收矩阵式键盘行编码信息根据列扫描信号和接收的行编码信号储存键盘信息根据输入的键盘信息确定设置的角度值、发出控制舵机信号和同步显示的数据。
下。
0~9数字键用来设置旋转角度3.矩阵式键盘控制器设计根据矩阵式键盘控制器模块的功能,矩阵式键盘控制器模块电路的设计可分为3个部分。
矩阵式键盘的列扫描控制和行编码译码。
本设计采用矩阵式键盘控制器输出列扫描信号,然后根据俗人的行编码信号进行编码。
扫描信号kbcol[3]~kBCOL[0]进入键盘,变化的顺序依次为1110、1101、1011、0111、1110。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三自由度机械臂设计报告
我们的机械臂参照人体小臂的结构:手肘处两个自由度(一个水平方向一个垂直方向),手腕处一个(垂直方向)。
按照题目要求在30*30的坐标系内我们将(0,15)设为底座放置点(0,0)为机械臂初始位置。
由此可知机械臂需达到的最远距离为15*√5,考虑到需要有螺钉固定的重合距离暂定臂长为:大臂长20cm,小臂长15cm。
且参考模型的机械结构暂定用双臂。
按照最初设计安装好之后,我们发现所购买的舵机并不能带动这么长的臂长,于是我们将臂长改成10cm+12cm并将双臂减少为单臂。
该方案能实现半径4cm左右的圆的绘制,找点的误差在0.5-1cm左右。
一.找坐标
设底盘水平方向的舵机角度为s,手肘处垂直舵机角度为θ1,手腕处角度为θ2。
确定坐标时先根据输入的(X,Y)得s=arctan(x/(y-15))。
可以列出方程式组ρ=acosθ1+bcosθ2
△h=asinθ1+bsinθ2
θ3=θ1+θ2
解得θ1=arcsin((ρ²﹢△h²+a²-b²)/(2a√(△h²+ρ²)))-arctan(ρ/△h)
θ2=arcsin((asinθ1-△h)/b)
θ3=θ1+θ2
(其中a=10cm,b=12cm,△h=3cm)
二.画圆
方案一:
圆可以分为两部分的配合而组成的。
垂直自由度舵机的来回划线运动及底盘水平自由度舵机的左右旋转运动当水平舵机转到设定最大值的时间与垂直舵机划线划到中点的时间相同时就能得到一个椭圆,而当左右转动到设定的最大值之间的距离与划线的距离相等时就构成了一个圆。
我们先将圆划分为四部分如下:
调试程序后发现s的变化速率也是变化的。
于是加上红色两条线使水平方向线分为4份
利用找点的公式确定五个交点各自对应的θ1,s值,再各自进行相减分别算出四段运动相对应角度变化的平均速率。
该方案的难点在于时间的合理搭配及s的速率补偿划分
方案二:
根据圆心的坐标在坐标里找圆周上一系列的点在将其连线构成圆。
该方案思路较简单清晰但容易造成误差的累积,对舵机的精度要求较高,且对之前找坐标的算法精确性要求很高。
而且有个严肃的问题斜着的两点不是直线移过去的而是折线,所以定点需特别相近,可以选择建立一个数据库进行点数据的调用达到目的。
综合考虑了以上两种方案的优缺点及现有的硬件条件,我选择了方案一。
三.主要程序
#include<Servo.h>
//定义舵机引脚
Servo myservo1;
Servo myservo2;
Servo myservo3;
//定义极坐标
float x=15.0,y=10.0,r=4;
float l;
float s,jiao1,jiao2;
float rd=57.3;
//按钮定义
int BUTTON1 = 9;
int BUTTON2 = 8;
void setup() {
myservo1. attach(3);
myservo2. attach(5);
myservo3.attach(6);
pinMode(BUTTON1,INPUT);
pinMode(BUTTON2,INPUT);
}
void loop() {
l=sqrt(sq(x)+sq(y-15.0));
//分情况讨论得s
if(y<15)
s=atan(x/(15.0-y))*rd;
else if(y==15)
s=90;
else
s=atan(x/(15.0-y))*rd+180;
if(digitalRead(BUTTON1)==HIGH)//找点
{FD();
myservo1.write(s);
delay(30);
myservo2.write(jiao1*rd);
delay(30);
myservo3.write(jiao2*rd);
delay(30);
}
else if(digitalRead(BUTTON2)==HIGH)//画圆
huayuan();
}
void FD()//计算角1角2
{
float number1,number2,number3;
number2=atan(l/3.0);
number1=(sq(l)-35.0)/(20.0*sqrt(9+sq(l)));
number1=3.14-asin(number1);
jiao1=(number1-number2);//计算角1弧度值
number3=(10.0*sin(jiao1)-3.0)/12.0;
jiao2=(asin(number3)+jiao1);//角2弧度值
}
void huayuan()
{
float number1,number2,number3,number4,number5,number6; int i;
float jiao11,jiao12,jiao13;
float du1=3.25,du2=1;
FD();
number1=jiao1;
l=l-r;
FD();
jiao11=jiao1;
l=l+r/2.0;
FD();
jiao12=jiao1;
l=l+r;
FD();
jiao13=jiao1;
l=l+r/2.0;
FD();
myservo1.write(s);
myservo2.write(jiao1*rd);
myservo3.write(jiao2*rd);
number2=((jiao13-jiao1)/5.0);
number3=((number1-jiao13)/5.0);//前半圆 number5=(jiao12-number1)/5.0;
number6=(jiao11-jiao12)/5.0;//后半圆
for(i=0;i<20;i++)
{ if(i<5)
{ s=s-du1;
jiao1=jiao1+number2;
}
else if(i>=5&&i<10)
{s=s-du2;
jiao1=jiao1+number3;
}
else if(i>=10&&i<15)
{ s=s+du2;
jiao1=jiao1+number5;
}
else if(i>=15)
{s=s+du1;
jiao1=jiao1+number6;
}
number4=(10.0*sin(jiao1)-3.0)/12.0; jiao2=(asin(number4)+jiao1);
myservo1.write(s);
myservo2.write(jiao1*rd);
myservo3.write(jiao2*rd);
delay(100);
}
for(i=19;i>=0;i--)
{
if(i>=15)
{s=s+du1;
jiao1=jiao1-number6;
}
else if(i<15&&i>=10)
{s=s+du2;
jiao1=jiao1-number5;
}
else if(i<10&&i>=5)
{s=s-du2;
jiao1=jiao1-number3;
}
else if(i<5)
{s=s-du1;
jiao1=jiao1-number2;
}
number4=(10.0*sin(jiao1)-3.0)/12.0;
jiao2=(asin(number4)+jiao1);
myservo1.write(s);
myservo2.write(jiao1*rd);
myservo3.write(jiao2*rd);
delay(100);
}
l=l-r;
}
四.方案的改进预计
1.将购买精度及力矩更加大的舵机。
2.机械结构进行一定的改变使两臂长度变得更加合理,并且可以再加一个舵机使持笔更加方便。
2.对于画圆可以计算出s与ρ的关系式并将运动时间分成大小不同的几段进行绘制。
这样使圆心可变并且舵机相搭配的角度更加精确。
五.心得
虽然做之前思路已经理的很清楚了但做的很心酸。
无论是实际机械结构存在的不可抗干扰因素还是某些不小心的人为的不可抗因素让我更加清晰的认识到理想状态与实际操作之间的巨大区别。
相对于理想模拟的元器件实际元器件存在着许多操作中要注意的问题。
这次机械臂的制作加强了我们动手能力,也让我懂得了学习需要触类旁通多动脑的同时也要多动手,纸上谈兵做不成任何东西。