PID算法在无刷直流电机调速电路中的应用
模糊PID控制在直流无刷电机控制系统中的应用
模糊PID控制在直流无刷电机控制系统中的应用管于球(中南大学信息科学与工程学院控制工程系,长沙410075)摘要:本文根据直流无刷电机控制系统是多变量、时变和非线性等的复杂系统的特点以及简单PID控制性能的缺点,提出了改进方案,电机控制系统的速度环采用参数自整定模糊PID控制,建立了仿真模型。
将该控制方案的仿真结果与简单PID 控制的仿真结果相比较可得,模糊PID控制在抗负载扰动能力和启动转速超调方面具有明显的优越性,有效地满足了用户对直流无刷电机控制系统高性能的要求。
关键词:直流无刷电机,矢量控制,空间矢量脉宽调制,PID控制,模糊控制中图分类号:TK52 文献标识码:AAbstract: For not only the problem that the brushless direct current motor control system is a complex system with multi-variable, time-variability and non-linear, but also the shortcomings of simple PID control performance, the essay proposes an improved program. Parameter self-tuning fuzzy-PID control method is used for the speed loop of the motor control system, and the results are researched and analyzed deeply. Compared with the simulation result of this control program and that of simple PID, Parameter self-tuning fuzzy-PID control has strong ability of anti-load disturbance and provides small location overshoot, basically satisfying the high performance requirement of brushless direct current motor.KEY WORDS:BLDCM, vector control, SVPWM, PID control, fuzzy-control1 引言随着经济的快速发展,人们对汽车的需求不断增加,但是由于能源和环境问题,从而赋予电动汽车广阔的发展空间。
直流电机基于PID控制的PWM调速系统

调速原理对于星形连接的三相无刷直流电机,在理想条件下,任何时刻只有两相定子绕组通电。
令加在两相通电绕组上的平均电压为Vd,则电压平衡方程式为[31]:(3.1)可以得到转速为:(3.2)式中:Em为电机各相反电动势;Im为各相相电流;n为无刷直流电机转速;R为回路等效电阻,包括电机两相电阻和管压降的等效电阻。
由式(3.2)可知,无刷直流电机的转速调节可以通过改变外施平均电压Vd来实现。
3-4-2电枢电压的调节方法改变电枢电压是直流调速的主要方法。
本系统采用PWM(脉宽调制)调速方式,通过调节逆变器功率器件的PWM触发信号的占空比来改变外施的平均电压Vd,从而实现无刷直流电机的调速。
PWM技术可分为单极性PWM控制和双极性PWM控制。
单极性PWM控制的控制信号如图3.4所示,在每个60°电角度的区域内,一个功率开关器件一直处于开通状态,另一个处于PWM状态;双极性PWM控制的控制信号如图3.5所示,在每个60°电角度区域内,两个工作的功率管器件或者都开通,或者都关断。
图3.4单极性PWM控制各触发信号图3.5双极性PWM控制各触发信号Fig.3.4Trigger signal of single polarity PWM Fig.3.5Trigger signal of double polarity PWM一般情况来说,采用单极性PWM控制的电流波动最大值只有采用双极性PWM控制的电流波动最大值的一半[32][33],因此为了减小电流脉动和功率管的开关损耗,本电机控制系统采用单极性的PWM控制技术。
3-4-3 PWM波的产生在传统的单片机控制系统中,PWM波的产生需要专门的发生电路和时间延时(死区)电路,增加了CPU的开销,并降低了系统的稳定性。
而TMS320F2812的PWM电路设计可以减少产生PWM波形的CPU开销和减少用户的工作量,同时能尽量减小功率开关器件的损耗,降低电动机转矩脉动性。
无刷直流电机的调速与控制技术

无刷直流电机的调速与控制技术随着科技的发展,电动机在各个领域的应用越来越广泛。
而无刷直流电机作为一种高效、可靠的电机,在许多领域得到了广泛的应用。
无刷直流电机的调速与控制技术是保证电机运行稳定性和提高其性能的重要一环。
一、无刷直流电机的工作原理无刷直流电机是一种基于电磁感应原理工作的电动机。
其核心部件是电机转子上的永磁体,通过感应电流产生的磁场与定子线圈产生的磁场相互作用,从而实现电机的运转。
相比于传统的有刷直流电机,无刷直流电机省去了电刷与换向器件,因此具有更高的效率和更长的寿命。
二、无刷直流电机的调速方法无刷直流电机的调速方法主要包括电压控制调速和电流控制调速两种。
1. 电压控制调速电压控制调速是通过改变电压的大小来控制电机的转速。
在实际应用中,最常见的方式是采用PWM (Pulse Width Modulation) 调制技术。
PWM技术通过调整电压的占空比,使得电机在一个固定的周期内以不同的占空比工作,从而实现不同的转速。
这种方法简单易行,但是对于大功率的无刷直流电机,其调速范围较窄。
2. 电流控制调速电流控制调速是通过改变电机定子线圈的电流来控制电机的转速。
常见的控制方法有开环控制和闭环控制。
开环电流控制是在电机定子线圈中加回馈电阻,通过改变反馈电阻的大小来调整电流。
这种方法结构简单,控制参数易调,但是系统稳定性较差,无法适应负载的变化。
闭环电流控制是在开环控制的基础上加入反馈环节,通过传感器测量电机的电流,并与设定的电流进行比较,通过PID控制算法来调整控制器输出的电压,从而控制电机的转速。
这种方法可以提高系统的稳定性和动态响应性能,适用于对转速精度和系统稳定性要求较高的应用。
三、无刷直流电机的控制技术无刷直流电机的控制技术是实现电机调速的重要手段之一。
根据不同的应用场景和需求,可以选择不同的控制方法。
1. 速度控制速度控制是无刷直流电机最基本的控制方式。
通过改变电机的输入提速,可以控制电机的转速。
模糊自适应PID控制器在无刷直流电机控制系统中的应用
模糊自适应PID控制器在无刷直流电机控制系统中的应用孙佃升1白连平2(1.滨州学院自动化系,滨州,256601)(2.北京机械工业学院自动化系北京 100085)摘要:无刷直流电机是一种多变量、非线性的控制系统,采用经典的PID控制难以达到满意的控制效果。
本文将模糊自适应PID控制器应用于无刷直流电机的控制中,运用模糊控制原理对PID参数进行在线调整。
实验结果表明,较之传统的PID控制,采用模糊自适应PID控制的无刷直流电机控制系统具有更好的动态和静态性能,达到了较好的控制效果。
关键词:无刷直流电机;模糊PID;自适应控制;参数自整定The Application of Fuzzy Adaptive PID Controllerfor Control System of BLDCMSUN Dian-sheng 1BAI Lian-ping 2(1.Department of Automatization, Binzhou College, Binzhou,256600,China)(2.Department of Automatization, Beijing Information Science&Technology University,Beijing,100085,China)ABSTRACT: As brushless DC motor (BLDCM) is a multi-variable and non-linear system, using conventional PID control can not obtaion satisfied control effect. This paper introduce the application of fuzzy adaptive PID controller for control system of BLDCM and parameters self-tuning online by employing Fuzzy control principle. The experiments illustrate that excellent static and dynamic performance compared with the conventional PID control.KEY WORDS: Brushless DC Motor(BLDCM); Fuzzy PLD; adaptive control; parameter self-tuning1 引言无刷直流电机既有优良的调速性能,又克服了有刷直流电机机械换向带来的诸多问题,在各个领域获得了广泛的应用。
PID控制的永磁无刷直流电动机调速系统设计(1)
-78-基于模糊自适应PID控制的永磁无刷直流电动机调速系统设计戚鹏(安徽建筑工业学院电子与信息工程学院,安徽合肥230601)引言永磁无刷直流电机在工业中应用十分普遍。
工业的发展要求电机精度更高、速度更快、效率更高,因此电机调速系统至关重要。
电机调速系统最常用的方法是双闭环PID控制器,但该方法存在参数不能随着被控对象的变化而作相应的调整的缺点,当参数变化时,PID控制器的参数不能随着被控对象的变化而作相应的调整。
模糊自适应PID控制将模糊控制理论运用在控制过程中,把规则的条件、操作用模糊集表示,并把这些模糊控制规则以及有关信息(如评价指标、初始PID参数等)作为知识存入计算机知识库中,然后计算机根据控制系统的实际响应情况(即专家系统的输入条件)、运用模糊推理,即可自动实现对PID参数的最佳调整。
本文提出了一种基于模糊自适应PID控制的无刷直流电机调速系统,对调速系统的设计方法进行了研究,并利用MATLAB软件进行了仿真,表明该控制方法可以达到很好的控制效果。
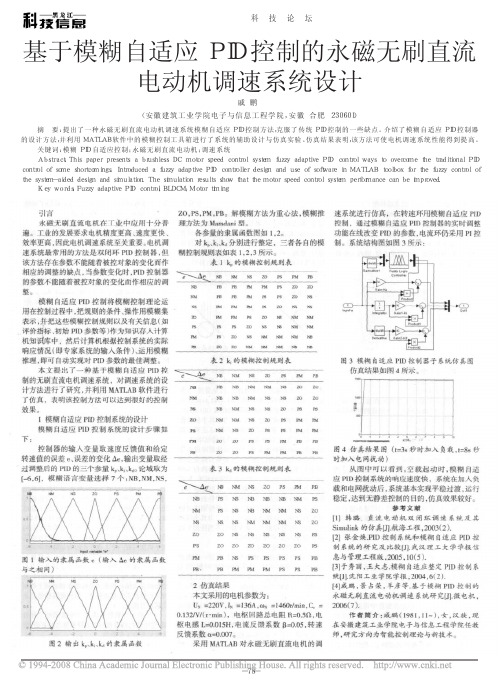
1模糊自适应PID控制系统的设计模糊自适应PID控制系统的设计步骤如下:控制器的输入变量取速度反馈值和给定转速值的误差e、误差的变化Δe,输出变量取经过调整后的PID的三个参量kp、ki、kd。
论域取为[-6,6],模糊语言变量选择7个:NB,NM,NS,ZO,PS,PM,PB。
解模糊方法为重心法,模糊推理方法为Mamdani型。
各参量的隶属函数图如1,2。
对kp、ki、kd分别进行整定,三者各自的模糊控制规则表如表1,2,3所示。
表1kp的模糊控制规则表表2ki的模糊控制规则表表3kd的模糊控制规则表2仿真结果本文采用的电机参数为:UN=220V,IN=136A,ωN=1460r/min,Ce=0.132/V/(r・min),电枢回路总电阻R=0.5Ω,电枢电感L=0.015H,电流反馈系数β=0.05,转速反馈系数α=0.007。
采用MATLAB对永磁无刷直流电机的调速系统进行仿真,在转速环用模糊自适应PID控制,通过模糊自适应PID控制器的实时调整功能在线改变PID的参数,电流环仍采用PI控制。
无刷电机控制系统中的PID参数调整方法研究

无刷电机控制系统中的PID参数调整方法研究无刷电机在许多领域中得到广泛应用,如无人机、电动汽车、机器人等。
PID 控制器是无刷电机控制系统中常用的控制算法,通过调整PID参数可以改善系统的性能,提高系统的稳定性和响应速度。
本文将研究无刷电机控制系统中常用的PID参数调整方法,并分析其优缺点。
PID控制器是由比例(P)、积分(I)和微分(D)三个部分组成的。
比例部分根据当前误差进行控制,积分部分根据误差的积累进行控制,微分部分根据误差的变化率进行控制。
通过调整PID参数,可以优化系统的响应速度、稳定性和抗干扰能力。
常见的PID参数调整方法包括经验法、Ziegler-Nichols法、模糊PID法和自适应PID法等。
这些方法各有优劣,下面将对其进行详细介绍。
1. 经验法:经验法是最简单直观的PID参数调整方法之一。
根据经验选择合适的PID参数,通过实际试验进行调整。
这种方法适用于简单的控制系统,但对于复杂的系统往往效果不佳。
2. Ziegler-Nichols法:Ziegler-Nichols法是PID参数调整中的一种基本方法,通过系统的临界增益和临界周期来确定PID参数。
该方法适用于一阶和二阶系统,对于高阶系统不太适用。
此外,该方法在实际应用中容易产生非理想的过冲和震荡现象。
3. 模糊PID法:模糊PID方法是一种智能控制方法,结合了模糊控制和PID控制的优点。
通过模糊控制的模糊推理和PID控制的调整能力,能够有效克服传统PID方法的一些不足之处。
该方法能够适应不确定性较强的控制系统,但需要较为复杂的算法和较大的计算量。
4. 自适应PID法:自适应PID方法是根据系统的实时状态和参数变化来自适应调整PID参数的方法。
该方法能够实时调整PID参数,适应系统的变化。
例如,在电动汽车中,其电池的电压和电流变化较大,需要根据实际情况调整PID参数。
尽管自适应PID方法能够提高系统的稳定性和适应性,但相对于其他方法,其设计和实现较为复杂。
基于无刷直流电动机调速系统的混合模糊PID控制

基于无刷直流电动机调速系统的混合模糊PID控制0 引言无刷直流电动机(BLDCM)结构简单、运行可靠、没有火花、电磁噪声低,广泛应用于航空航天、机器人、交通、煤矿自动化和工业自动化等领域。
传统的调速系统为PID模拟控制系统,结构简单,但是其控制要想达到很好的控制效果必须调整好P、I、D三者之间的关系,但是这种关系又不是简单的线性关系,而模糊控制具有很强的非线性映射功能,可是简单实用的模糊控制器又难以达到较高的控制精度。
若要综合两种优势,则需要将模糊控制与PID控制结合在一起,本文在模糊控制与PID控制相结合的智能控制方法基础上,增加一个模糊变积分环节,控制器的输出为两分量之和,这样既能保留经典控制器的特性,又能增加模糊控制器快速响应的特点,完善了传统的PID控制。
仿真实验表明,这种方法具有比单纯的模糊PID方法更好的动、静态性能,并提高了系统的鲁棒性,系统取得了较好的控制效果。
1 无刷直流电动机的数学模型定子绕组产生的电磁转矩为由式(2)可以看出,BLDCM电磁转矩公式与普通直流电动机相似,其电磁转矩大小与磁通和电流幅值成正比,所以控制逆变器输出方波电流的幅值即可控制电磁转矩。
为产生恒定电磁转矩,要求定子电流为方波,反电动势为梯形波,且在每半个周期内,方波电流的持续时间为120°电角度,两者应严格同步。
运动方程为式中:Te为电磁转矩;TL为负载转矩;B阻尼系数;ω为电机机械转速:J电机的转动惯量。
2 控制方法设计2.1 模糊PI智能控制方案传统BLDCM调速系统应用的是单纯的PID控制器,其动态抗扰性能较差,故文献进一步改进了PID控制器,在速度环中将模糊控制器和PID控制器复合控制,成为二维模糊控制,构成新型调速控制系统,这种控制器的优点是综合了PID和模糊控制的优点,并且控制智能化,但是这种结构的缺点就是存在着切换“毛刺”。
1983年W.L.Bialkowski提出了混合型模糊PID控制器:在二维模糊控制器的基础上叠加常规积分控制器,将模糊控制器的输出与积分控制器的输出相叠加作为混合型控制器的总输出,此种控制器的优点是可以消除极限环振荡,也可消除误差,但是不足是积分控制器的参数相对固定,不能满足自适应调节,为了取得更好的控制效果,可将控制器改进,结构如图1。
内模PID控制器在无刷直流电机调速系统中的应用

关键词 : I 控制 ; PD 内模 控 制 ; — I 控 制 ; 闭环 直 流 电机 ; 速 系统 I MC P D 双 调 中 图分 类号 : P 7 T 2 文献标识码 : A 文章 编 号 :1 7 — 2 6 2 1 )2 0 4 — 4 6 4 6 3 (0 2 1— 0 2 0
c re p n i g r lt n h p o h n e n l mo e o t l a d t e ca s I o r s o d n ea i s i f t e i tr a d lc n r n h l s i P D,c mb n s t e r a v n a e ,d sg s a P D o o c o i e h i d a tg s ein I
流 电机 进 行 调 速 。在 建 立 对 象理 论 模 型 的基 础 上 , 过 对 控 制 器 在 线 仿 真 比较 表 明 : 对 本 设 计 对 象 , 于 内部 模 型 通 针 基 的 PD控 制 器 不 论在 系统 阶 跃 响 应 或 是 扰 动 跟 踪 等 控 制 效 果 上 都 能 到 达 经 典 PD控 制 的 要 求 , I I 同时 还 降低 了 参 数 设
t ec mp e i n a d mn s f ep r mee sd sg . h o l xt a d r n o e so aa tr e in y h t Ke r s P D o to ;i tr a d l o to ;it r a d lc n rlP D;d u l — o C mo o ;s e d s s m y wo d : I c n r l n e n lmo e n r l n e l mo e o to— I c n o bel p D tr p e yt o e
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
PID算法在无刷直流电机调速电路中的应用
摘 要:在分析了无刷直流电机闭环速度控制方案的基础上,针对PID算法在无刷直流电机应用中出现的种种问题,给出了相应的解决方法,提出了非线性变速
积分PID算法,成功地解决了在低采样周期时PID算法的积分饱和问题。
直流电机具有良好的调速性能,如无级调速、调速范围宽、低速性能好、高起动转矩、高效率等。
无刷直流电机由于采用电子换向,PWM调速,在进一步提高直流电机性能的同时又克服了直流电机机械换向带来的一系列问题,从而大大延长了电机的使用寿命,近年来已广泛应用于家电、汽车、数控机床、机器人等领域。
1、无刷直流电机的速度控制方案
对无刷直流电机转速的控制即可采用开环控制,也可采用闭环控制。
与开环控制相比,速度控制闭环系统的机械特性有以下优越性:闭环系统的机械特性与开环系统机械特性相比,其性能大大提高;理想空载转速相同时,闭环系统的静差
率(额定负载时电机转速降落与理想空载转速之比)要小得多;当要求的静差率相同时, 闭环调速系统的调速范围可以大大提高。
无刷直流电机的速度控制方案如图1所示。
无刷直流电机控制器可采用电机控制专用DSP(如TI公司的TMS320C24X 系列、AD公司的ADMCxx系列),也可采用单片机+无刷直流电机控制专用集成电路的方案。
前者集成度高,电路设计简单,运算速度快,可实现复杂的速度控制算法,但由于DSP的价格高而不适合于小功率低成本的无刷直流电机控制器。
后者虽然运算速度低,但只要采用适当的速度控制算法,依然可以达到较高的控制精度,适合于小功率低成本的无刷直流电机控制器。
摩托罗拉公司的第二代无刷直流电机控制专用集成电路MC33035,集成了转子位置传感器译码器电路、脉宽调制电路(PWM)、功率输出驱动电路、限流电路,可以实现无刷直流电机速度开环系统的全部控制功能。
系统中采用了一片MC33035、一片低成本的单片机AT89C2051、串行输入A/D、串行输出D/A 以及由MOSFET型场效应管组成的功率驱动电路,无刷电机控制逻辑和保护由MC33035完成,单片机用来完成转速设定值的获取、转速反馈的实时采样以及速度控制算法的实现。
闭环速度调节器采用比例积分微分控制(简称PID控制),其输出是输入的比例、积分和微分的函数。
PID调节器控制结构简单,参数容易整定,不必求出被控对象的数学模型,因此PID调节器得到了广泛的应用。
PID调节器虽然易于使用,但在设计、调试无刷直流电机控制器的过程中应注意:PID调节器易受干扰、采样精度的影响,且受数字量上下限的影响易产生上下限积分饱和而失去调节作用。
所以,在不影响控制精度的前提下对PID控制算法加以改进,关系到整个无刷直流电机控制器设计的成败。
2、速度设定值和电机转速的获取
为在单片机中实现PID调节,需要得到电机速度设定值(通过A/D变换器)和电机的实际转速,这需要通过精心的设计才能完成。
无刷直流电机的实际转速可通过测量转子位置传感器(通常是霍尔传感器)信号得到,在电机转动过程中,通过霍尔传感器可以得到如图2所示的周期信号。
图2:霍尔传感器信号
由图2可知,电机每转一圈,每一相霍尔传感器产生2个周期的方波,且其周期与电机转速成反比,因此可以利用霍尔传感器信号得到电机的实际转速。
为尽可能缩短一次速度采样的时间,可测得任意一相霍尔传感器的一个正脉冲的宽度,则电机的实际转速为:
但由于利用霍尔传感器信号测速,所以测量电机转速时的采样周期是变化的,低速时采样周期要长些,这影响了PID调节器的输出,导致电机低速时的动态特性变差。
解决的办法是将三相霍尔传感器信号相“与”,产生3倍于一相霍尔传感器信号频率的倍频信号,这样可缩短一次速度采样的时间,但得增加额外的硬件开销。
直接利用霍尔传感器信号测速虽然方便易行,但这种测速方法对霍尔传感器在电机定子圆周上的定位有较严格的要求,当霍尔传感器在电机定子圆周上定位有误差时,相邻2个正脉冲的宽度不一致,会导致较大的测速误差,影响PID 调节器的调节性能。
若对测速精度要求较高时,可采用增量式光电码盘,但同样会增加了电路的复杂性和硬件的开销。
电机速度设定值可以通过一定范围内的电压来表示。
系统中采用了串行A
/D(如ADS7818)来实现速度设定值的采样。
但在电机调速的过程中,电机控制器的功率输出部分会对A/D模拟输入电压产生干扰,进行抗干扰处理。
3、非线性变速积分的PID算法
(1)PID算法的数字实现
离散形式的PID表达式为:
其中:KP,KI,KD分别为调节器的比例、积分和微分系数;E(k),E(k-1)分别为第k次和k-1次时的期望偏差值;P(k)为第k次时调节器的输出。
比例环节的作用是对信号的偏差瞬间做出反应,KP越大,控制作用越强,但过大的KP会导致系统振荡,破坏系统的稳定性。
积分环节的作用虽然可以消除静态误差,但也会降低系统的响应速度,增加系统的超调量,甚至使系统出现等幅振荡,减小KI可以降低系统的超调量,但会减慢系统的响应过程。
微分环节的作用是阻止偏差的变化,有助于减小超调量,克服振荡,使系统趋于稳定,但其对干扰敏感,不利于系统的鲁棒性。
(2)经典PID算法的积分饱和现象
当电机转速的设定值突然改变,或电机的转速发生突变时,会引起偏差的阶跃,使|E(k)|增大,PID的输出P(k)将急剧增加或减小,以至于超过控制量的上下限Pmax,此时的实际控制量只能限制在Pmax, 电机的转速M(k)虽然不断上升,但由于控制量受到限制,其增长的速度减慢,偏差E(k)将比正常情况下持续更长的时间保持在较大的偏差值,从而使得 PID算式中的积分项不断地得到累积。
当电机转速超过设定值后,开始出现负的偏差,但由于积分项已有相当大的累积值,还要经过相当一段时间后控制量才能脱离饱和区,这就是正向积分饱和,反向积分饱和与此类似。
解决的办法:
一是缩短PID的采样周期(这一点单片机往往达不到),整定合适的PID参数; 二是对 PID算法进行改进,可以采用非线性变速积分PID算法。
(3)变速积分的PID算法
变速积分PID算法的基本思想是改变积分项的累加速度,使其与偏差的大小相适应。
偏差大时,减弱积分作用,而在偏差较小时则应加强积分作用,为
这时PID 算法可改进为:
f 的值在0~1区间变化,当偏差大于A +B 时,证明此时已进入饱和区,这时f =0,不再进行积分项的累加;|E (k )|≤A +B 时,f 随偏差的减小而增大,累加速度加快,直至偏差小于B 后,累加速度达到最大值1。
实际中A,B 的值可做一次性整定,当A,B 的值选得越大,变速积分对积分饱和抑制作用就越弱,反之越强。
笔者的经验:取A =30%[|E (k )|]MAX ,B =20%[|E (k )|]MAX 为宜。
(4)非线性变速积分的PID 算法
变速积分用比例作用消除了大偏差,用积分作用消除小偏差,大部分情况下可基本消除积分饱和现象,同时大大减小了超调量,容易使系统稳定,改善了调节品质,但对于在大范围突然变化时产生的积分饱和现象仍不能很好地消除,这时可采用非线性变速积分的PID 算法。
非线性变速积分的PID 算法的基本思想是将PID 调节器输出限定在有效的范围内,避免P (k )超出执行机构动作范围而产生饱和。
程序的框图如图3所示。
4、结语
在无刷直流电机驱动器中采用非线性变速积分PID算法,消除了一般PID 调节器算法中的饱和现象,使电机调速稳定,并具有快速跟随性,同时也使电机具有恒转矩调速特性。