第六章-3小区域控制测量
第6章 工程控制测量

• 一等控制网采用“三角锁”的形式。大致沿经线 和纬线布设成纵横交叉的三角锁系,锁长200~ 250km,构成许多锁环。锁内由近于等边的三角 形组成,边长为20~30km。 • 二等控制网有两种布网形式。一种是由纵横交叉 的两条二等基本锁将一等锁环划分成4个大致相 等的部分,这4个空白部分用二等补充网填充, 称纵横锁系布网方案 纵横锁系布网方案;另一种是在一等锁环内布 纵横锁系布网方案 设全面二等三角网,称全面布网方案 全面布网方案。二等基本 全面布网方案 锁的边长为20~25km,二等网的平均边长为 13km。 • 三、四等三角网在二等三角网内进一步加密,平 均边长为4~5km和2~3km。
•
用经纬仪测量出网中所有三角形的内角。当已知两个点的坐标, 或已知一个点的坐标和一条边的长度(用测距仪或钢尺测距) 与方位角(用陀螺经纬仪测定),便可求算网中所有控制点的 平面坐标(由正弦定理传递边长)。
•
构建、测定三角网点的工作叫三角测量。
• 三角测量在过去(20世纪80年代以前)是平面控制测量 的主要方法。过去已经建成、目前仍在使用的国家一、 二、三、四等平面控制点基本上都是采用三角测量方法 获得的。当时,高精度测边很难实现。 • 三角测量的观测量主要是水平角,边长观测很少,距离 传递误差较大;此外,三角网对相邻控制点之间的通视 条件要求很高(多边形的中点须与多点通视),实地选 点难度较大,一般只能位于高处(如山头或房顶),使 用也不方便。因此,在光电测距仪和全站仪已普遍应用 的现代,城市控制测量和工程控制测量基本上不采用三 角网。 • 除了测角三角网之外,还有在此基础上发展起来的、形 状与测角三角网相类似的测边(三角)网和边角组合网。 与测角网一样,测边网和边角网目前也很少采用。
+
• 导线点埋好之后,根据需要可绘制“点之记”。
小地区高程控制测量
小区域控制测量
小区域控制测量分为两种方法:1.三、四等水准测量
2.三角高程测量
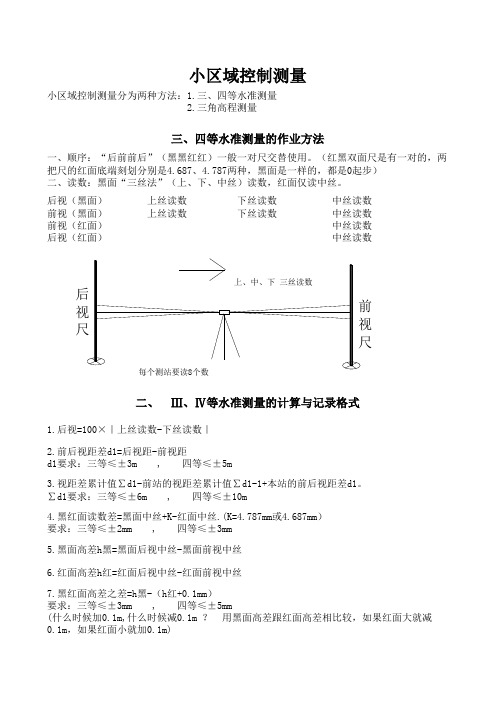
三、四等水准测量的作业方法
一、顺序:“后前前后”(黑黑红红)一般一对尺交替使用。
(红黑双面尺是有一对的,两把尺的红面底端刻划分别是4.687、4.787两种,黑面是一样的,都是0起步)
二、读数:黑面“三丝法”(上、下、中丝)读数,红面仅读中丝。
后视(黑面) 上丝读数 下丝读数 中丝读数
前视(黑面) 上丝读数 下丝读数 中丝读数
前视(红面) 中丝读数
后视(红面) 中丝读数
二、 Ⅲ、Ⅳ等水准测量的计算与记录格式
1.后视=100×|上丝读数-下丝读数|
2.前后视距差d1=后视距-前视距
d1要求:三等≤±3m , 四等≤±5m
3.视距差累计值∑d1-前站的视距差累计值∑d1-1+本站的前后视距差d1。
∑d1要求:三等≤±6m , 四等≤±10m
4.黑红面读数差=黑面中丝+K-红面中丝.(K=4.787mm或4.687mm)
要求:三等≤±2mm , 四等≤±3mm
5.黑面高差h黑=黑面后视中丝-黑面前视中丝
6.红面高差h红=红面后视中丝-红面前视中丝
7.黑红面高差之差=h黑-(h红+0.1mm)
要求:三等≤±3mm , 四等≤±5mm
(什么时候加0.1m,什么时候减0.1m ? 用黑面高差跟红面高差相比较,如果红面大就减0.1m,如果红面小就加0.1m)
8.高差中数=[h黑+(h红+0.1m)]/2
9.水准路线总长L=∑后视距+∑前视距。
小地区控制测量

二、国家控制网
平面:国家平面控制网由一、二、三、四等三角网 (triangulation network)组成。
高程:国家高程控制网是由一、二、三、四等水准 网(leveling network)组成。
国家控制网的特点:高级点逐级控制低级点。
图形1:国家一、二等平面控制网布置形式
一等三角网
二等三角网
3.支导线(open traverse) 支导线的点数不宜超过2个,仅作补点使用。
图形:导线的布设形式
附合导线
闭合导线
支导线
单结点导线(导线网)
三、导线的外业
1.踏勘选点及建立标志 2.测水平角 3、量水平边长 4、测连接角、连接边
要求:
相邻导线点要通视 便于量距、架设仪器 具有控制意义 边长符合规范规定(特别注意避免短边)
点 号
观测角
改
正 数
坐标方位 角
距离
坐标增量 改正后的
△x
△ y
△x
△ y
坐标值
x
y
1
2 107 48 30 +13 125 30 00 105.22 53 18 43 80.18
3 73 00 20 +12 4 89 33 50 +12 306 19 15 129.34
215 53 17 78.16 1 89 36 30 +13
2
125 30 00
-61.10 +47.90 +76.61 -63.32
500.00 500.00
∑ 359 59 10 +50
392.90 +0.09
f 3595910 3600000 50 f容 60 4 120
小区域控制测量

小区域控制测量控制测量概述1、测量的原则:测量工作必须遵循“从整体到局部,先控制后碎部”的原则。
这里的“整体”是指控制测量(control survey),其含义为控制测量应按由高等级到低等级逐级加密进行,直至最低等级的图根控制测量(mapping control survey),再在图根控制点上安置仪器进行碎部测量或测设工作。
2、控制测量:以较高的精度测定地面少数与整体有关点的相对位置。
(x、y、H),为地形测量和工程测量提供依据和精度的工作。
3、控制网:在测区内选定若干控制点而构成一定的几何图形。
4、控制测量包括平面控制测量和高程控制测量,称测定点位的(x,y)坐标为平面控制测量,测定点位的H坐标为高程控制测量。
5、国家控制网:在全国范围内建立的控制网。
它是全国各种比例尺测图的基本控制,也为研究地球的形状和大小,了解地壳水平形变和垂直形变的大小及趋势,为地震预测提供形变信息等服务。
国家控制网是用精密测量仪器和方法依照《国家三角测量和精密导线测量规范》、《全球定位系统(GPS)测量规范》、《国家一、二等水准测量规范》及《国家三、四等水准测量规范》按一、二、三、四等四个等级、由高级到低级逐级加密点位建立的。
6、平面控制测量(1)国家平面控制测量★我国的国家平面控制网(horizontal control network)是采用逐级控制、分级布设的原则,分一、二、三、四等方法建立起来的。
★经典方法主要由三角测量(triangulation)法、导线测量(traverse survey)法。
另外,还有卫星大地测量,如GPS卫星定位。
★一等三角锁(triangulation chain)沿经线和纬线布设成纵横交叉的三角锁系,锁长200~250公里,构成许多锁环。
构成国家平面控制网的骨干。
一等三角锁内由近于等边的三角形组成,边长为20~30公里。
★二等三角测量有两种布网形式,一种是由纵横交叉的两条二等基本锁将一等锁环划分成4个大致相等的部分,这4个空白部分用二等补充网填充,称纵横锁系布网方案;另一种是在一等锁环内布设全面二等三角网(triangulation network),称全面布网方案。
测量学6小地区控制测量

二、国家控制 网的概念
为了统一全国各地区的测量工作,必须进行全国性的 控制测量,以建立国家控制网,供整个国民经济规划 和国防建设等使用。国家控制网分平面控制网和高程 控制网。
国家平面控制网
国家平面控制网主要是采用三角测量方法建立的,即 在全国范围内将控制点组成一系列的三角形,通过测 定所有三角形的内角,推算出各控制点的坐标。国家 控制网也是按照“由高级到低级、由整体到局部”的 原则布设的。国家平面控制网按其精度可分为一、二、 三、四等四个等级。
根据坐标方位角的定义,它是 从坐标轴北端开始顺时针旋转 至某边的水平角。因此有相同 端点的两条边,右侧边的坐标 方位角就等于左侧边的坐标方 位角加上两边之间的夹角,同 一条边的正反方位角相差180°。 即沿导线前进方向:
1
4
上式中包含具相同端点两条边 的方位角关系以及正反方位角 的关系。
2
3
5
α前=α后-180°+β左 =α后+180°-β右。
(四) 起始边方位角的测定
与高级已知点连接的导线,因有已知边方 位角,只需观测连接角便可以推算各边的 方位角,然后推算各点的坐标。对于不与 高级已知点相连接的闭合导线,则可用罗 盘仪测定一条起始边的磁方位角,便可推 算其他各边的方位角,并推算各点的坐标。
(五) 导线测量记录
导线测量的外业记录有规定的表格。
二、 经纬仪附合导线计算 附合导线计算角度闭合差和坐标增量闭合差的公式
不同。 (一) 角度闭合差的计算与调整
附合导线的角度闭合差为从一已知边方位角出发, 使用观测角推算至另一条已知边,推算方位角与已知 方位角之差。 (二) 坐标方位角的推算
推算出的已知边的坐标方位角应与已知值相同,以 此作为计算的检核。 (三) 坐标增量的计算 根据导线各边的方位角和边长,计算各坐标增量,计 算方法与闭合导线相同。
第6章 平面控制测量

(XC,YC)
C
D
2
附合导线图
观测数据:连接角β ∇观测数据:连接角βB 、βC ;
导线转折角β 导线转折角β1, β2, β3 ,β4 ; 导线各边长D 导线各边长DB1,D12,……,D4C。 ,
3.支导线 3.支导线
βB DB1
β1 1
D12
2
αAB
A
B (XB,YB)
∇A、B为已知边,点1、2为新建支导线点。 为已知边, 为新建支导线点。 ∇已知数据:αAB,XB,YB
控制测量 采用精密仪器和严密的方法, 采用精密仪器和严密的方法,对控制网测 确定控制点的平面位置和高程, 量,确定控制点的平面位置和高程,作为其它 测量的基准。 测量的基准。
C
D
E
F
A
B
M
G
控制点—具有准确可靠坐标(X,Y,H) —具有准确可靠坐标(X 的基准点。 作用:
1.为测图或工程建设的测区建立统一的平面和高 1.为测图或工程建设的测区建立统一的平面和高 程控制网 2.控制误差的积累 2.控制误差的积累 3.作为进行各种细部测量的基准 3.作为进行各种细部测量的基准
4
2.附合导线 2.附合导线
∇AB、CD为已知边,点1、2、3、4为新建导线点。 AB、CD为已知边, 为已知边 为新建导线点。 ∇已知数据:αAB,XB,YB;αCD,XC,YC。
β3 βB DB1 β1 D12 β2 D23 βC αCD D34 β4 D4C
3
αAB A
B (XB,YB)
1
4
城市导线网
表7 - 3
城市三边网的主要技术要求来自城市导线控制测量的主要技术要 求
3、工程控制网
课程思政教案设计(土木工程测量)
课程思政教案设计1、专业知识讲解(55分钟)(1)教师利用多媒体讲解控制测量的基本原理(10分钟)(2)引导学生总结控制测量的外业方法、测量顺序(20分钟)利用连续图片演示和教师视频演示等信息化手段把抽象的重点内容转变为直观形象的实践过程,加深了学生对重点知识的理解和记忆。
图1 区域控制测量种类(3)教师利用多媒体讲解数据计算并结合实例进行例题讲解。
(20分钟)结合例题讲解具体的计算步骤方法。
通过例题,用动画手段和最简练的语言帮助学生掌握内业计算的方法,表格填写的规范程序。
图2 内业计算数据记录表(4)播放控制测量的视频(5分钟)通过视频资料,帮助学生将抽象的测量程序具体化,说明控制测量应注意的问题。
2、引入港珠澳大桥建设中测量工作(20分钟)(1)引入本次素材。
大桥跨越珠江口伶仃洋海域,连接香港、珠海、澳门三地,项目全长约50公里,整个工程施工质量与测量精度密切相关,其中用到了不少测量专业技术。
该桥被业界誉为桥梁界的“珠穆朗玛峰”,被英媒《卫报》称为“现代世界七大奇迹”之一;不仅代表了中国桥梁先进水平,更是中国国家综合国力的体现。
图3 港珠澳大桥选址(2)小区域控制网的建立是桥梁建设的基础性、先决性工作。
该桥属特大型跨海桥隧工程,它跨越粤、港、澳三地,三地的坐标及高程系统互不相同,为了做到高精度、一网多用、长期保持大桥测量基准的稳定和统一,必须先行建立统一的首级平面及高程控制网,将港珠澳大桥的测量基准全部统一到该网基础之上,以保证后续勘测、施工测量及变形测量监控的顺利开展。
(3)该桥控制测量选点多,精度控制要求高。
港珠澳大桥首级控制网建网共布设了16个GPS平面兼高程控制点,分别按国家B级GPS控制网和国家一、二等水准测量的精度要求进行设计和测量。
控制网平差后的成果精度,均达到了技术设计书规定的精度指标。
图4 港珠澳大桥首级高程控制网3、总结(5分钟)教师总结本节课内容,理顺知识,强调重点,锻炼学生归纳总结的能力。
第6章小区域控制测量
2021年7月30日星期五
第一节 控制测量概述
一、控制测量的概念
1.控制网
在测区范围内选择若干有控制意义的点(称为 控制点),按一定的规律和要求构成网状几何图形, 称为控制网。
控制网分为平面控制网和高程控制网。
2.控制测量
测定控制点位置的工作,称为控制测量。
测定控制点平面位置(x、y)的工作,称为平 面控制测量。
测定控制点高程(H)的工作,称为高程控制 测量。
控制网有国家控制网、城市控制网和小地区控 制网等。
二、国家控制网
在全国范围内建立的控制网,称为国家控制 网。它是全国各种比例尺测图的基本控制,并为确 定地球形状和大小提供研究资料。
国家平面控制网,主要布设成三角网,采用三 角测量的方法。
国家高程控制网,布设成水准网,采用精密水 准测量的方法。
457.68 m
yB yA DAB sin AB
658.82 m135.62 m sin 803654
792.62 m
2.坐标反算
根据直线起点和终点的坐标,计算直线的边长 和坐标方位角,称为坐标反算。 *
DAB
xA2B
y
2 AB
AB
arctan
yAB xAB
按上式计算坐标方位角时,计算出的是象限角,
yAB xAB
arctan 288.57 m 38.49 m
2622409
二、闭合导线的坐标计算
x 2
3
1082718
841018
1212702
1354911
4
900701
3352400
1 x1 500.00m
y1 500.00m
5
第6章小区域控制测量
三、教学基本要求
1、教学重点: 方位角的概念及推算、坐标正算与反算的概念、导线内业计算四等水准测量 2、教学难点: 导线内业计算
四、教材处理意见
以教材为主,参考其他同类教材,制作电子教案。
五、作业选题的建议
1、
2、习题:P62-63
六、第六章(三次授课)教案、讲稿附后
Lecture1
重庆交通大学 土木建筑学院 教案 周 次 第 10 周,第 1 次课
AB 345 180 130 360 35
六:象限角 以子午线的南端或北端为准量至直线的锐角。 七、用罗盘仪测磁方位角 1、罗盘仪的构造 磁针、刻度盘、读数设备 2、使用 1)安置罗盘仪于直线的一端,对中,整平。 2)松开磁针固定螺旋,使它自由转动。
(校核)
3)用望远镜瞄准直线的另一端点,约磁针停止时,读数磁针北端所指的读数(例镜读南端)
17=14-13=15-16 0.1
1 h 平=18= 2 (15+16 0.1 )
每页水准测量计算校核 高差
(3 8) (6 7) (15 16) 218
(偶数站)
(3 8) (6 7) (15 16) 218 0.1 (奇数站)
J b 测日,半测日较差 40
3、量边 钢尺一盘量距往返丈量 4、连测 独立地区(只有一个控制点)测起始方位角 非独立地区(已知两个以上的控制点)测连接角 。
Lecture3:
三、导线内业计算 按规定的表格计算,角度取至秒, x, y 的数位与边长的小数位相 ,步之有校核。 (一)闭合导线计算 1、编号,将已知数据填入表格中。
-360 +360
起 起•
06《工程测量》第六章 小地区控制测量作业与习题答案
43
学的方法处理测量成果,合理地分配测量误差,最后求出各导线点的坐标值。 导线连测,目的在于把已知点的坐标系传递到导线上来,使导线点的坐标与已
知点的坐标形成统一系统。 由于导线与已知点和已知方向连接的形式不同,连测的内容也不相同。分为只
测连接角和除了测连接角外还要测连接边。 7.依据测距方法的不同,导线可以分为哪些形式? 用经纬仪测角和钢尺量边的导线称为经纬仪导线。如用光电测距仪测边的导线
46
坐标 A B C
观测角 1 2
X(米) 3646.35 3873.96 4538.45
2.闭合导线各内角观测值见表,试计算闭合导线各点的坐标,并画出草图(点
号按顺时针编排)。(见表 6-2)
3.附合导线各已知点坐标及导线观测右角值见表 6-3,试对该导线平差并计算
各导线点坐标。
4.一附合导线如图,以 AB→CD 为推进方向,观测的是左角,已知各左角观
测值、起终边的坐标方位角及起终
点坐标如下(计算表 6-4):
角度的精度是( C )。
A. ∠A 比∠B 高; B. ∠A 比∠B 低; C. 相等。
5.附合导线与闭合导线坐标计算的不同点是( A )。
A.角度闭合差计算与调整、坐标增量闭合差计算;
B.坐标方位角计算、角度闭合差计算;
C.坐标增量计算、坐标方位角计算;
D.坐标增量闭合差计算、坐标增量计算。
6.导线测量中,若有一边长测错,则全长闭和差的方向与错误边长的方向
42
制有哪些形式?
小区域控制网是指在面积小于 15 平方公里范围内建立的控制网。
小区域控制网,也要根据面积大小分级建立,主要采用一、二、三级导线、一、
二级小三角网或一、二级小三边网,其面积和等级的关系,如表 6-1。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第六章 小区域控制测量 思考题与习题
1.测绘地形图和施工放样时,为什么要先建立控制网?控制网分为哪几种?
2.何谓小区域控制测量?何谓图根控制测量?小区域控制测量选定控制点时应注意哪些问题?
3.已知A 点坐标XA=437.620,YA=721.324;B 点坐标XB=239.460,YB=196.450。
求AB 之方位角及边长?
()()22AB AB AB Y X D ∆+∆=
()()22A B A B AB Y Y X X D -+-=
()()22324.721450.196620.437460.239-+-=AB D ()()22874.524160.198-+-=
AB D
1.314760=AB D =561.03
874.5240
160.198<-=∆<-=∆AB AB Y X 所以方位角在第三象限
AB
AB AB X Y
∆∆+︒=tan arc 180α
160
.198874
.524tan arc 180--+︒=AB α
65.2tan arc 180+︒=AB α 9169180'︒+︒=AB α 91249'︒=AB α
答:AB 之方位角为91249'︒;边长为561.03
4.闭合导线123451的已知数据及观测数据列入表6-19,计算闭合导线各点的坐标。
()01802⨯--=-=∑∑∑n f 测理测ββββ 1180)25(10540'=︒⨯--'︒=
98236.2*0404''≈''±=''±=n f 容β
,
容ββf f ≤将βf 以相反的符号平均分配到各观测角中,即各角的改正数为:n f v ββ-=,βββv i i +='
i i i βαα'-+=+01180观测右角:
1
,1,1,1,1,1,sin cos ++++++=∆=∆i i i i i i i i i i i i D y D x αα
⎪⎭
⎪⎬⎫=∆=∆∑∑00理理
y x ∑∑∑∑∑∑∆=∆-∆=∆=∆-∆=测理测测
理测y y y f x x x
f y x
m f m f y x 23.013.0==
22y x D f f f +=
=0.26m
2000
12890185.76326.085.763D ,<≈===∑∑D f K f D
D 导线全长相对误差导线总长全长误差总和 5.附合导线的已知数据及观测数据列入表6-20,计算附合导线各点的坐标。
-︒⨯+-=右β180)(n f CD AB
4584441162454116''='''︒-'''︒=
082*04404''=''±=''±=容βf
,
容ββf f ≤将βf ,附合导线右角观测以相同的符号分配到各观测角中,首先以平均数大致进行分配,不可整除部分,以夹角边短的多分配一些,各角的改正数为:n f v ββ=,βββv i i +='
i i i βαα'-+=+01180观测右角:
1
,1,1,1,1,1,sin cos ++++++=∆=∆i i i i i i i i i i i i D y D x αα
()()
起终测起终测y y y f x x x f y x --∆=--∆=∑∑
m f m f y x 12.013.0-==
22y x D f f f +=
=0.18m
2000
13267147.57818.047.578D ,<≈===∑∑D f K f D
D 导线全长相对误差导线总长全长误差总和
6.图6-25为一单三角锁,已知数据为:XA=800,YA=800,αAB=40°20'00",Do=424.100,Dn=298.712,各三角形观测数据为
⎪⎩⎪
⎨⎧'''︒='''︒='''︒=⎪⎩⎪
⎨⎧'''︒='''︒='''︒=⎪⎩⎪
⎨⎧'''︒='''︒='''︒=⎪⎩⎪
⎨⎧'''︒='''︒='''︒=⎪⎩⎪
⎨⎧'''︒='''︒='''︒=0125920380380195489491453022690281651335770133412233608483610295643412532252574425916024305
554443
332
221
11c b a c b a c b a c b a c b a
试计算各三角点的坐标。
7.图6-26为某大桥的大地四边形控制网,观测数据为:
⎪⎪⎩⎪⎪⎨
⎧'
''︒='''︒='''︒='
''︒=⎪⎪⎩⎪⎪⎨
⎧'''︒='''︒='''︒='''︒=8162453
56251527152017229821555035127520049805149432
14321b b b b a a a a DAD=276.985m ,试用近似平差法计算桥轴线加的长度。
8.用三、四等水准测量建立高程控制时,如何观测、记录和计算? 9.在什么情况下采用三角高程测量?它如何观测、记录和计算? lO .用你学过的计算机语言编写附合导线平差计算程序。