状态空间法
自动控制原理课件8状态空间分析法

1 2 3
解析法
通过解状态方程和输出方程,得到系统的状态和 输出响应。
数值法
采用数值计算方法,如欧拉法、龙格-库塔法等, 对状态方程和输出方程进行离散化求解,得到系 统的离散时间响应。
线性时不变系统的性质
分析线性时不变系统的稳定性、可控性和可观测 性等性质,为系统设计和控制提供依据。
状态空间模型的求解方法
在处理高阶系统时,计算量较大,需要借助计算机进行数值计算。 在实际应用中,可能需要对系统进行适当的简化或近似处理,以降低
计算复杂度和提高计算效率。
状态空间分析法的优势与局限性
01 02 03 04
局限性
对于非线性系统和时变系统,建立状态空间模型可能较为复杂。
在处理高阶系统时,计算量较大,需要借助计算机进行数值计算。 在实际应用中,可能需要对系统进行适当的简化或近似处理,以降低
描述输入对状态变量的影响。
状态方程的建立
状态变量的选择
选择系统的状态变量,通常基于系统 的物理性质和动态特性进行选择。
建立状态方程
根据状态变量和系统的动态特性,建 立状态方程,描述系统内部状态的变
化规律。
确定系统矩阵
根据状态方程,确定系统矩阵A和B, 其中A描述状态变量的时间导数,B
描述输入对状态变量的影响。
计算复杂度和提高计算效率。
02 状态空间模型的建立
02 状态空间模型的建立
状态方程的建立
状态变量的选择
选择系统的状态变量,通常基于系统 的物理性质和动态特性进行选择。
建立状态方程
根据状态变量和系统的动态特性,建 立状态方程,描述系统内部状态的变
化规律。
确定系统矩阵
根据状态方程,确定系统矩阵A和B, 其中A描述状态变量的时间导数,B
状态空间法例题
状态空间法例题【原创实用版】目录1.状态空间法的概念和基本原理2.状态空间法的应用3.状态空间法的例题解析正文1.状态空间法的概念和基本原理状态空间法是一种用于求解马尔科夫决策过程(MDP)最优策略的数学方法。
它将 MDP 问题转化为一个关于状态空间中所有可能状态的线性方程组,通过求解这个方程组,可以得到 MDP 问题的最优策略。
状态空间法的基本原理是基于贝尔曼最优方程,通过对每个状态的价值函数进行迭代计算,最终收敛到最优值函数,从而得到最优策略。
2.状态空间法的应用状态空间法广泛应用于强化学习、自动控制、人工智能等领域。
在实际问题中,当我们面临一个 MDP 问题时,可以通过状态空间法来求解最优策略,从而实现最优决策。
例如,在机器人导航问题中,状态空间法可以帮助我们找到最优路径,使得机器人能够迅速到达目标地点。
3.状态空间法的例题解析下面我们通过一个简单的例题来解析状态空间法的应用。
例题:一个机器人需要在一个网格世界中从起点走到终点,每个格子有两种可能的动作:向上或向右。
每个格子有一个奖励值,机器人的目标是选择动作,使得从起点到终点的累积奖励最大。
解:我们可以将这个问题转化为一个 MDP 问题,用状态空间法求解最优策略。
(1)定义状态空间:状态空间包括所有可能的状态,即机器人所在的格子。
(2)定义动作空间:动作空间包括所有可能的动作,即向上和向右。
(3)定义奖励函数:奖励函数是每个状态下采取某个动作后的奖励值。
(4)根据贝尔曼最优方程,我们可以得到状态空间法对应的线性方程组。
(5)求解线性方程组,得到每个状态下的最优价值函数。
(6)根据最优价值函数,我们可以得到每个状态下的最优策略。
通过以上步骤,我们可以得到从起点到终点的最优路径,以及相应的最大累积奖励。
总之,状态空间法是一种求解 MDP 最优策略的有效方法,它具有广泛的应用前景。
自动控制原理状态空间法

目录
• 引言 • 状态空间法基础 • 线性系统的状态空间表示 • 状态反馈与极点配置 • 最优控制理论 • 离散系Biblioteka 的状态空间表示01引言
状态空间法的定义
状态空间法是一种基于状态变量描述线性时不变系统的方法,通过建立系 统的状态方程和输出方程来描述系统的动态行为。
状态变量是能够完全描述系统内部状态的变量,可以是系统的物理量或抽 象的数学变量。
最优控制问题
在满足一定约束条件下,寻找一个控制输入, 使得被控系统的某个性能指标达到最优。
性能指标
通常为系统状态或输出函数的积分,如时间加 权或能量加权等。
约束条件
包括系统动态方程、初始状态、控制输入和终端状态等。
线性二次调节器问题
线性二次调节器问题是最优控制问题的一个特例, 其性能指标为系统状态向量的二次范数。
THANKS
状态方程描述了系统内部状态变量之间的动态关系,而输出方程则描述了 系统输出与状态变量之间的关系。
状态空间法的重要性
1
状态空间法提供了系统分析和设计的统一框架, 可以用于线性时不变系统的各种分析和设计问题。
2
通过状态空间法,可以方便地实现系统的状态反 馈控制、最优控制、鲁棒控制等控制策略。
3
状态空间法具有直观性和易于实现的特点,能够 直接反映系统的动态行为,便于理解和分析。
02
状态空间法基础
状态与状态变量
状态
系统在某一时刻的状态是由系统 的所有内部变量共同决定的。
状态变量
描述系统状态的变量,通常选择 系统的输入、输出和内部变量作 为状态变量。
状态方程的建立
根据系统的物理或数学模型,通过适 当的方法建立状态方程。
现代控制理论状态空间法
根据系统微分方程建立状态空间表达式.
1.输入项中不含输入导数项的线性系统空间状态 表达式
• 系统描述为:
y (n ) a1 y (n1) an1 y an y u
(1)
讨论:状态如何选择
y(t) C (t)x(t) D(t)u(t)
2)线性时不变系统: x Ax Bu y Cx Du
在通常情况下,大多数还是研究线性时不变 系 统,即线性定常系统,因此本课程的主要研究对 象是线性定常系统。
4.状态空间描述的结构图(或称状态变量图)
• 例:根据上例画出结构图. • 解:先将例子写成下述形式
现代控制理论
第一章 状态空间法
控制系统的状态空间描述
一.问题的引出 1 --古典控制理论的局限性 1、仅适用于SISO的线性定常系统(外部描述,
时不变系统) 2、古典控制理论本质上是复频域的方法.(理论) 3、设计是建立在试探的基础上的.(应用) 4、系统在初始条件为零,或初始松驰条件下,才
能采用传递函数.
定义2.状态变量
状态变量是确定系统状态的最小一组变量,如果以最
少的n个变量 x1 (t ), x2 (t ), , xn (t ) 可以完全描述系
统的行为 (即当t≥ 时输入和
t0
在t= t0初始状态给定后,系统的状态完全可以确定),那 么
x1 (t ), x2 (t ), 是一, xn组(t )状态变量.
(2)状态变量选取不唯一,有时选取状态变量仅为数 学描述所需,而非明确的物理意义。
(3)状态变量是系统的内部变量,一般情况下输出是 状态的函数,但输出总是希望可量测的。
(4)仅讨论有限个状态变量的系统。 (5)有限个数的状态变量的集合,称为状态向量。 (6)状态向量的取值空间称为状态空间。
第9章 状态空间分析法

根据A和b的上述特征,一般只要对微分方程式或传递
函数的观察,就能直接写出矩阵A和b及对应的动态方程。
第二节 传递函数与动态方程的关系
能控标准形状态图
第二节 传递函数与动态方程的关系
例9-3 已知一系统的传递函数为
试写出能控标准形的状态空间表达式。 解:根据矩阵A和b的特征,直接写出系统能控标准形的 状态空间表达式为:
第二节 传递函数与动态方程的关系
3、对角标准型实现
当系统的传递函数只含有相异的实极点时,还可化为 对角标准型实现。 设系统的传递函数为:
令 则上式变为
第二节 传递函数与动态方程的关系
式中: 则 令
Ci lims i W s
s i
则得
i
i
i
对上式取拉氏变换
第二节 传递函数与动态方程的关系
i
或写作
第二节 传递函数与动态方程的关系
上述状态方程的状态变量描述有如下特点: (1)矩阵A对角线上的元素为传递函数的极点,其余元素
全为零,各状态变量间没有耦合,彼此是独立的。
(2)矩阵b是一列向量,其元素均为1;矩阵C为一行向量, 它的元素为W(s)极点的留数。
第二节 传递函数与动态方程的关系
其中
D为m×r型矩阵
m×r
Wij s 为第i个输出与第j个输入间的传递函数。
第二节 传递函数与动态方程的关系
求系统的传递函数。 例9-2 已知系统的动态方程式如下,
解:
-
=
-
第二节 传递函数与动态方程的关系
二、由传递函数列写动态方程 设线性定常系统微分方程的一般形式为:
y为系统的输出量,u为系统的输入量,初始条件为零, 对上式取拉氏变换,得系统的传递函数为: -
状态空间法PPT课件

状态空间法的应用领域
控制系统设计
状态空间法广泛应用于控制系统设计,通过建立系统的状 态方程和输出方程,可以设计控制律来控制系统的行为。
信号处理
在信号处理领域,状态空间法可用于信号滤波、预测和估 计,通过建立信号的状态模型来描述信号的变化规律。
优势与局限
状态空间法具有直观、灵活和易于理解等优点,能够提供丰富的信息用于系统分 析和设计。然而,状态空间法也存在一些局限,例如对于高阶系统的计算可能较 为复杂,且在某些情况下难以得到解析解。
对未来研究的展望
进一步发展
随着科学技术的不断进步,状态空间法有望在更多领域得到应用和发展。例如,随着智能传感器和执行器技术的 进步,状态空间法在智能控制和自适应控制等领域的应用将更加广泛。此外,随着深度学习和人工智能技术的快 速发展,状态空间法有望与这些技术相结合,用于解决更复杂和高级的问题。
05 状态空间法的应用实例
在控制系统中的应用
控制系统建模
利用状态空间法建立控制系统的数学模型,以便 进行系统分析和设计。
控制系统优化
通过状态空间法对控制系统进行优化设计,提高 系统的性能和稳定性。
控制系统故障诊断
利用状态空间法对控制系统的故障进行诊断和定 位,及时发现和排除故障。
在信号处理中的应用
状态空间法ppt课件
contents
目录
• 引言 • 状态空间法的基本概念 • 状态空间法的实现 • 状态空间法的优势与局限性 • 状态空间法的应用实例 • 结论
01 引言
什么是状态空间法
状态空间法是一种数学方法,用于描述动态系统的状态变化 和输出响应。它通过建立状态方程和输出方程来描述系统的 状态变量和输出变量之间的关系,从而对系统进行建模、分 析和控制。
自动控制原理课件8状态空间分析法

目录
• 状态空间分析法概述 • 线性系统的状态空间分析 • 非线性系统的状态空间分析 • 状态空间分析法的应用
01
状态空间分析法概述
Chapter
状态空间的概念
状态变量
描述系统动态行为的内部变量, 通常选取系统的输入、输出及内 部变量作为状态变量。
状态方程
描述系统内部状态变量之间关系 的数学模型,通常采用微分方程 或差分方程形式表示。
故障隔离和定位
结合状态空间方法和故障诊断算法,可以隔离和 定位故障源,提高故障处理的效率和准确性。
3
故障预测和预防
利用状态空间方法和数据挖掘技术,可以对控制 系统的故障进行预测和预防,降低故障发生的概 率。
THANKS
感谢观看
在控制系统仿真制系统的动态行为,验证 控制策略的有效性。
系统分析和调试
通过仿真实验,分析系统的性能指标,对系统进行调 试和优化。
多目标优化
利用状态空间方法,可以对多个性能指标进行优化, 实现多目标控制。
在控制系统故障诊断中的应用
1 2
故障检测和诊断
通过状态空间方法,可以检测和诊断控制系统的 故障,及时采取措施进行修复和维护。
状态方程定义
描述系统内部状态变量随时间变化的数学模型,通常表示为dx/dt = Ax + Bu,其中x是状态向量,u是输入向量,A 和B是系统矩阵。
建立状态方程
根据系统的物理特性和输入输出关系,通过适当的方法建立状态方程。
状态方程解法
通过求解状态方程,可以得到系统的状态响应。
线性系统的稳定性
稳定性的定义
极点配置的方法
通过求解线性矩阵不等式或优化问题,找到合适的 控制输入u(t),使得系统的极点配置在期望的位置 上。
状态空间法
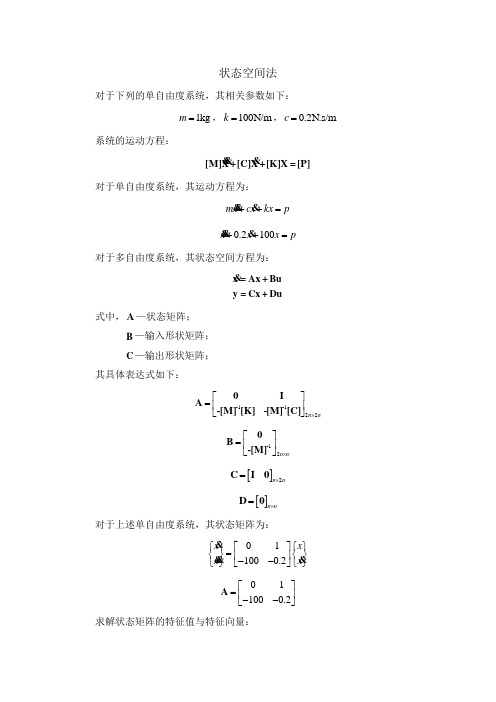
状态空间法对于下列的单自由度系统,其相关参数如下:1kg m =,100N/m k =,0.2N.s/m c =系统的运动方程:[M]X +[C]X +[K]X =[P]对于单自由度系统,其运动方程为:mx cx kx p ++=0.2100x x x p ++=对于多自由度系统,其状态空间方程为:x =Ax +Bu y =Cx +Du式中,A —状态矩阵;B —输入形状矩阵;C —输出形状矩阵;其具体表达式如下:-1-122-n n⨯⎡⎤=⎢⎥⎣⎦0I A -[M][K][M][C] -12n n⨯⎡⎤=⎢⎥⎣⎦0B -[M] []2n n ⨯=C I 0[]n n ⨯=D 0对于上述单自由度系统,其状态矩阵为:011000.2x x x x ⎧⎫⎡⎤⎧⎫=⎨⎬⎨⎬⎢⎥--⎩⎭⎣⎦⎩⎭011000.2⎡⎤=⎢⎥--⎣⎦A 求解状态矩阵的特征值与特征向量:0λ-=A I{}{}φλφ=A得到的特征值为:10.110j λ≈-+,20.110j λ≈--11{}0.110j φ⎡⎤=⎢⎥-+⎣⎦,21{}0.110j φ⎡⎤=⎢⎥--⎣⎦同时可以看出:{}{}(2)11(1)1=0.110j φλφ=-+,{}{}(2)22(1)2=0.110j φλφ=-- 取虚部为正的特征值求系统的特征参数。
系统的固有频率:110/n rad s ωλ===≈阻尼比:11Re()0.01λξλ-==≈根据其阵型图可以看出,其位于左半平面(即负半平面),因此系统是稳定的。
系统阻尼是正值,阻尼起到耗能效果;若阻尼为负值,将位于右半平面,系统将变得不稳定,此时阻尼起到吸收能量的作用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
S入OPEN 标出f(S)
启发式有序搜索算法
Y
OPEN空?
失败,退出
N 计算f(ni),i=1,2.. MIN[f(ni)入CLOSED
Y ni=T?
N
成功,退出
Y f(nij)< f’(nij-1)?
N
f(nij)取代 f’(nij-1) 指针改指j
扩 展 ni,生 成 全 部 后 继 节点。计算每个后继
隐式图:已知无限集合{si} 及后裔算符L,则 {si}和L规定的图
3)状态空间求解举例
例 2-3 推销员旅行问题。一个推销员计划 作一次旅行,必须访问图2-4所示的每个城 市。从城市A出发,访问每一个城市一次, 且最多一次,并返回城市A,求最短距离路 线。
B
10
77
13
E
A
6C
9
5
6
10
D
图2 – 4 推销员旅行问题地图
节点f(nij)
Y f(nij)< f’(nij-1)?
N
f(nij)取代 f’(nij-1) nij移回OPEN
Y
nij=T? NY
nij,加入OPEN,从nj加一指向节点nij的 Y 指针。计算f(nij),按 f(n)小-〉大排序
nij在OPEN?
nij在CLOSED? N
N
例 八数码难题。 估价函数:f(n)=d(n)+w(n)
图2-9 猴子和香蕉状态空间图
人工智能经典问题:
1 设有三个传教士和三个野人来到河边,打 算乘一只船从河右岸渡到河左岸去。该船 的最大负荷能力为两人。在任何时候,如 果野人人数超过传教士人数,野人就会把 传教士吃掉。他们怎样才能用这条船安全 地把所有人都渡过河去?
2 把八个皇后摆在一个标准的国际象棋棋盘 上,使得每行、每列以及每个对角线上都 只包含不多于一个皇后。画出部分状态空 间图,写出算符规则。
八数码算符:EL-- 空格左移 ER--空格右移 EU--空格上移 ED--空格下移
约 束:E1,4,6 -- 禁止EL E1,2,3 -- 禁止EU E3,5,8 -- 禁止ER E6,7,8 -- 禁止ED
例2-2 代数式简化问题。
(AB+CD)/BC
A/C+D/B
状态描述:二元树法
非 终 端:节点算术运算符号+、-、*、/
证明:
(1)每当一个目标节点可达时,算法终止。
结论1:A*对有限图总是终止的
结论1:A*对无限图也是终止的
证明:反证法 ,假设A*不终止
设:d*(n) : A*产生的搜索S树中从S到任一节点n
的搜索隐含图中最短路经长度
e :图中所有弧的最小长度 g(n) g*(n) d*(n) e ∵ h(n) 0
状态描述:目前为止访问过的城市列表(A…) 初始状态:(A) 目标状态: (A ……A)
算符:下一步走向的城市 (a)(b)(c)(d)(e) 约束:每个城市只能走过一次,A除外
(AB)
(A)
初始节点
7
6 (AC) 10
13
(AD)
(ACD) 5
(AE)
6 (ACDE) (ACDEB)
10
(ACDEBA)
最优化问题:寻找遵循某种规则的最优路径 例如,八数码难题求解中使用的算符最少, 走步最少(最优解搜索问题)
状态描述三原则:
(1)状态描述方式选择,尤其是初始状态 (2)算符集合及其对状态描述的作用 (3)目标状态描述特性
2)图示法(问题求解的抽象描述) (1)图论的几个概念
图:节点的集合,包括有限节点或无限节点。 有向图:节点之间用有向弧线联结的图。 节点:
归纳法假设:A1扩展了A2搜索树中深度 k 的 所有节点
证明:A2搜索树中由A2扩展的深度k+1的任意节 点n也可由A1扩展
根据假设,A2搜索树中n的任一父辈节点都可由A1
S
n f*(n)=g*(n)+h*(n)
T
f(n) = g(n) + h(n) : f*(n)的一个估计 f*(S) = h*(S) :从起始节点到目标节点的最佳路径 .
OPEN
A*的可纳性
CLOSED
可纳性:对于任意图G,如果存在从S到T
的路径,那么,终搜止索:找算到目法标 总能终止在一条 从S到T的最佳路径上用完,OP则EN此节点搜索算法可 纳
四种状态:(W, x, Y, z)
算符集合:
① goto(U) (a,0,b,0) goto(U)
(U,0,b,0)
② pushbox(V) (b,0,b,0) pushbox(V) (V,0,V,0)
③ climbbox (V,0,V,0) climbbox (V,1,V,0)
④ grasp
(c,1,c,0) grasp
根据结论1,终止前OPEN表上存在一个节 点n’,且满足:
f(n’)<f*(S)<f(t) 因此,这一步A*将选取n’而不是t进行扩展, 与假设A*已终止矛盾。 得证。
结论2:A*算法可纳
A*算法的最优性
h(n) = 0(无启发信息)是h*(n)的下界 设两种A*算法A1,A2有下式:
f1(n) = g1(n) + h1(n) f2(n) = g2(n) + h2(n)
j2
优化问题:寻求图中最小费用路径 (2) 问题求解的图描述 初始节点S与目标节点集合{ti}中任一节点
之间的路径。 初始节点集合{si}中任一节点与目标节点T
之间的路径。 初始节点集合{si}中任一节点与目标节点
集合{ti}中任一节点之间的路径。 (3) 图分类
显式图:各节点及其费用的弧线可以用图表 或表格的形式明确给出
Allen Newell (1927-
1992 ) 1975年第一 届图灵奖获得者,LT 发明者之一,美国人
工智能学会AAAI的发起 人之一
LT 逻辑理论家 ILP 归纳逻辑程序设计
2.1.1 状态空间法 1)问题描述
状 态:问题求解中每一步问题状况的数 据结构 状态描述:符号、字符串、向量、二维数 组、树、表等数据结构表示的问题状态 例 2-1 八数码难题
状态i ni
祖先
算符
nj 后裔 状态j
图 2 - 3 节点定义
路n径ij :,…存,n在ik)某,个令节j=点2,序3,…列N…[n,k],=(对n每i1,一ni个2,…ni,j-1, 如果都存在后裔nij,则称序列N[n]为长度 为k的路径
可达节点:如果两节点之间存在路径,则后 裔是祖先的可达节点
765
5
123 84
765
123 58 4
765
f(S)=d(n)+w(n)
6
283 164 75
6 283 14 765
7
7
23
184
765
7
23 18 4 76 5
A*算法 证明 h*(n)= k (n,T) :从节点n到目标节点最小路径费用 g*(n) = k (S,n):从起始节点S到节点n最小路径费用
得设f:(nAS)*=终f[*n(止s0,)n前1,,…令,nn’t是]是OSP到nE2NTn的表0 …一上n…1 条这.n’n最个3 佳序路列径的一
个节点
nk
存在: f(n’) = g(n’) + h(n’)
∵ n’在最佳路径上, ∴ g(n’) = g*(n’)
f(n’) = g*(n’) + h(n’) 又∵ h(n’) h*(n’)
7
目标节点
图 2 - 5 推销员旅行问题搜索树
例2-2.猴子和香蕉问题
猴子
香蕉
箱子
a
c
b
图 2-8 猴子和香蕉问题
状态描述模式:用变量描述状态集合的表达式
猴子状态:
水平走动 w
上下箱子 x[0,1],( 1=箱上,0 =箱下)
摘取香蕉 z[0,1],(1= 拿到,0 = 未拿到)。
箱子状态:水平移动Y
弧线费用:弧线表示的算符计算的费用
c(ni, nj) 路径费用:路径上所有弧线费用之和
优化问题:寻求图中最小费用路径
ni2 ni1
nik
ni3
C(ni4, ni5)
路径:k=10 ,k=6 可达节点:j=2,3,。。。,k
路径费用:
11
L1
c(ni( j1) , nij )
j2
7
L1
c(ni( j 1) , nij )
终端节点:变量、常量
树图:
B
C
A
CD
B
A B CD
图2-2 代数简化树图
算符:代数规则: 分配律、结合律、。。。 字符串法: ABCDBC ACDB
前缀(只作用于两个运算数) 目标状态
单一目标状态 多目标状态:某一条件下产生的子状态集
合。例如,象棋、围棋的终局
八数码难题目标状态:最上面一行不存在编 号大于5的棋子
∴ f(n’) g*(n’) + h*(n’)=f*(n’)
在最佳路径上的任一节点费用 f(n’) f*(S)
说明即使在A*还没有终止的OPEN表上,节 点的最小f值也不会变为无界。因此,对于 无限图来说,A*必须终止。
结论1:只要存在一条从S到某个目标节点 的路径,则A*必须终止。
推论1:OPEN表上任一具有f(n)f*(S)的节 点n,最终都将被A*选为扩展节点。
图2-12 宽度优先搜索 图2-13 深度优先搜索 盲目搜索: 宽度优先搜索,深度优先搜索 启发式搜索:利用启发式信息进行搜索的过程
启发式信息:用来加速搜索的特别信息
计