工件坐标的设定说明
设定工件坐标系G92指令

设定工件坐标系G92指令摘要:,G92,G91,Y0,G00,G90,X0,Y-40,轴承用超洁净钢生产技术设定工件坐标系G92指令 2702系列短行程气缸附件设定工件坐标系G92 指令指令格式 : G92 X__ Y__ Z__ 指令功能 : 设定工件坐标系图1 G92设定工件坐标系图2 G54设定工件坐标系指令说明 : (1) 在机床上建立工件坐标系(也称编程坐标系);设定工件坐标系G92指令指令格式: G92 X__ Y__ Z__指令功能:设定工件坐标系图1 G92设定工件坐标系图2 G54设定工件坐标系指令说明:(1) 在机床上建立工件坐标系(也称编程坐标系);(2)如图1所示,坐标值X、Y、Z为刀具刀位点在工件坐标系中的坐标值(也称起刀点或换刀点);(3)操作者必须在工件安装后检查或调整刀具刀位点,以确保机床上设定的工件坐标系与编程时在零件上所规定的工件坐标系在位置上重合一致;(4)对于尺寸较复杂的工件,为了计算简单,在编程中可以任意改变工件坐标系的程序零点。
(5)在数控铣床中有两种设定工件坐标系的方法:如上图1所示,先确定刀具的换刀点位置,然后由G92指令根据换刀点位置设定工件坐标系的原点,1)G92指令中X、Y、Z坐标表示换刀点在工件坐标系XpYpZp中的坐标值;2)如图2所示,通过与机床坐标系XYZ的相对位置建立工件坐标系XpYpZp,如有的数控系统用G54指令的X、Y、Z坐标表示工件坐标系原点在机床坐标系中的坐标值。
2.绝对坐标输入方式G90指令和增量坐标输入方式G91指令指令格式:G90G91指令功能:设定坐标输入方式指令说明:(1)G90指令建立绝对坐标输入方式,移动指令目标点的坐标值X、Y、Z表示刀具离开工件坐标系原点的距离;(2)G91指令建立增量坐标输入方式,移动指令目标点的坐标值X、Y、Z表示刀具离开当前点的坐标增量。
例题:如图3所示,刀具从A点快速移动至C点,使用绝对坐标与增量坐标方式编程。
工件坐标系讲解学习
工件坐标系工件坐标系工件坐标系是固定于工件上的笛卡尔坐标系,是编程人员在编制程序时用来确定刀具和程序起点的,该坐标系的原点可使用人员根据具体情况确定,但坐标轴的方向应与机床坐标系一致并且与之有确定的尺寸关系。
工件坐标系( Workpiece Coordinate System )固定于工件上的笛卡尔坐标系。
于加工工件而使用的坐标系,称为工件坐标系。
当工件在机床上固定以后,工件原点与机床原点也就有了确定的位置关系,即两坐标原点的偏差就已确定。
这就要测量工件原点与机床原点之间的距离。
这个偏差值通常是由机床操作者在手动操作下,通过工件测量头或碰刀的方式测量的。
该测量值可以预存在数控系统内或编写在加工程序中,在加工时工件原点与机床原点的偏差值便自动加到工件坐标系上,使数控系统按照机床坐标系确定工件的坐标值,实现零件的自动加工。
加工开始时首先要设定工件坐标系:用G54~G59可选择工件坐标系;TXXXX可以通过刀具偏置来实现工件坐标系偏移;G92(G5O)指令可设定工件坐标系。
这几种方法均可建立起工件坐标系。
1、G54~G59选择工件坐标系使用G54,---G59指令可以在预设的工件坐标系中选择一个作为当前工件坐标系。
这六个工件坐标系的坐标原点在机床坐标系中的坐标值(称为零点偏置值),必须在程序运行前,从“零点偏置”界面输入。
一般多用于需要建立不止一个工件坐标系的场合。
选择好工件坐标系后,若更换刀具,则结合刀具长度补偿指令变换Z向坐标即可。
不必更换工件坐标系。
2 、TXXXX工件坐标系偏置TXXXX可以在选择刀具的同时调用该刀具的偏置值。
类似于G54----G59的使用,使用前需在相应的位置偏置处输入对刀值。
T代码前两位数字代表刀位号,后两位代表数据偏置号。
数据偏置号一般为0至99,也就是说可以进行最多100个数值设置一一相当于建立100个工件坐标系。
使用起来无限制。
3、 G92(G50)设置工件坐标系G92一般为数控铣床及加工中心设定工件坐标系指令。
简述abb工业机器人工件坐标系的设定步骤和作用
简述abb工业机器人工件坐标系的设定步骤和作用
ABB工业机器人工件坐标系的设定步骤和作用包括以下几个步骤:
1. 定义基坐标系:首先需要确定一个基坐标系,通常是机器人的参考点或固定的机器人坐标系。
2. 定义工件坐标系:根据实际需求,通过机器人的示教器或者编程进行操作,选取一个合适的位置和方向,定义一个工件坐标系,通常是相对于基坐标系的。
3. 设置工件坐标系的原点:确定工件坐标系的原点位置,可以是工件的中心点或者其他合适的位置。
4. 设置工件坐标系的方向:确定工件坐标系的方向,通常可以通过朝向工件的某个参考点或者参照工件的特征来确定。
5. 确认工件坐标系:经过以上步骤设定好工件坐标系后,需要进行确认,确认无误后将坐标系保存。
工件坐标系的作用主要有以下几个方面:
1. 操作参考:通过设定工件坐标系,机器人可以根据该坐标系进行定位和操作,方便操作者进行编程和示教。
2. 补偿校准:通过工件坐标系的设定,可以实现机器人对工件的补偿校准。
例如,如果工件位置发生微小偏差,可以通过调
整工件坐标系来实现对偏差的修正。
3. 工具坐标系的设定:在某些情况下,需要将工具的坐标系与工件坐标系进行关联。
通过设定工件坐标系,可以方便地设定工具的坐标系,以实现更精确的操作。
总的来说,ABB工业机器人工件坐标系的设定步骤和作用可以帮助机器人实现精确的操作和补偿校准,提高工作效率和质量。
工件坐标系设定
通过改变外部原点偏置量或工件原点偏置量,就可以改变在G54~G59中指定 的6个坐标系位置。 改变外部工件原点偏置量或工件原点偏置量的方法有下列两种: ● 利用MDI 面板的方法 ● 利用程序的方法(使用可编程数据输入G代码或者工件坐标系设定G代码)
G10改变工件坐标系G54~G59
工件坐标系设定的方法(对刀)
偏移量
Z+ 工件原点
常见对刀方法 z试切法 z塞尺、标准棒 z寻边器 z杠杆表
Y+
X+
G54-G59工件坐标系设定界面
外部工
X+
件原点
偏置
MDI 面板分别进行: X0 测量 Y0 测量 Z0 测量
测量工件原 点偏置量
例:O0001;
工件坐标系使用案例
N001 G54; 接通电源时,选择G54 N002 G90G01X0Y0F1000;移动到G54程序原点
N003 G91G00X_Y_;
(加工程序)
N022 G55; 指令G55,刀具不移动 N023 G90G01X0Y0F1000;移动到G55程序原点 N024 G91G00X_Y_;
(加工程序)
N042 G56; 指令G56,刀具不移动 N043 G90G01X0Y0F1000;移动到G56程序原点 N044 G91G00X_Y_;
●把刀具移动到程序原点,把A点设
A
为工件原点时:
G92 X0 Y0 ;
设定工件坐标系(T系列)
设定工件坐标系(T系列)
格式: ห้องสมุดไป่ตู้50 X_ Z_ ;
工件原点设在卡盘的中心:
G50 X128.0 Z375.0(直径指定)
工件原点设定在工件右侧端面上:
工件坐标系设定 G50

3.8 工件坐标系设定G50
指令格式:G50X(U)Z(W);
指令功能:设置当前位置的绝对坐标,通过设置当前位置的绝对坐标在系统中建立工件坐标系(也称浮
动坐标系)。
执行本指令后,系统将当前位置作为程序零点,执行回程序零点操作时,返回这一位置。
工件坐标系建立后,绝对坐标编程按这个坐标系输入坐标值,直至再次执行G50 建立新的工件坐标系。
G50 为非模态G 指令。
X:当前位置新的X 轴绝对坐标;
U:当前位置新的X 轴绝对坐标与执行指令前的绝对坐标的差值;
Z:当前位置新的Z 轴绝对坐标;
W:当前位置新的Z 轴绝对坐标与执行指令前的绝对坐标的差值;
G50 指令中未输入X(U)或Z(W),未输入的坐标轴按当前的绝对前坐标值设置坐标,X (U)、Z(W)均未输入时,不改变当前坐标值。
只要是执行了G50(包括用G50 S设置恒线速控制时的最高转速限制),就把当前位置设为程序零点。
如图3-15 所示,当执行指令段“G50 X100 Z150;”后,建立了如图所示的工件坐标系,并将(X100Z150)点设置为程序零点。
注:如果在刀具长度补偿状态执行G50设定坐标系,系统显示的绝对坐标为按当前刀具偏置值修正后的坐标设置值,程序零点为工件坐标系中由G50坐标设置值确定的位置。
在刀具长度补偿状态回程序
零点,回零结束的位置为取消刀具长度补偿后的程序零点位置。
FANUC数控系统加工中心工件坐标系建立与操作技巧
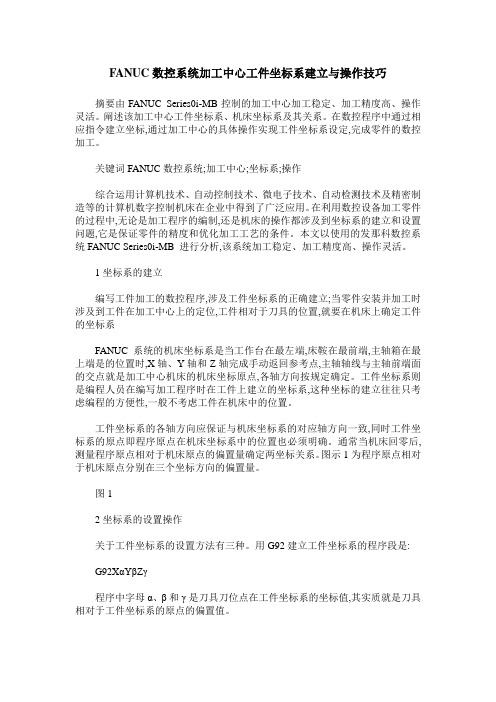
FANUC数控系统加工中心工件坐标系建立与操作技巧摘要由FANUC Series0i-MB控制的加工中心加工稳定、加工精度高、操作灵活。
阐述该加工中心工件坐标系、机床坐标系及其关系。
在数控程序中通过相应指令建立坐标,通过加工中心的具体操作实现工件坐标系设定,完成零件的数控加工。
关键词FANUC数控系统;加工中心;坐标系;操作综合运用计算机技术、自动控制技术、微电子技术、自动检测技术及精密制造等的计算机数字控制机床在企业中得到了广泛应用。
在利用数控设备加工零件的过程中,无论是加工程序的编制,还是机床的操作都涉及到坐标系的建立和设置问题,它是保证零件的精度和优化加工工艺的条件。
本文以使用的发那科数控系统FANUC Series0i-MB 进行分析,该系统加工稳定、加工精度高、操作灵活。
1坐标系的建立编写工件加工的数控程序,涉及工件坐标系的正确建立;当零件安装并加工时涉及到工件在加工中心上的定位,工件相对于刀具的位置,就要在机床上确定工件的坐标系FANUC系统的机床坐标系是当工作台在最左端,床鞍在最前端,主轴箱在最上端是的位置时,X轴、Y轴和Z轴完成手动返回参考点,主轴轴线与主轴前端面的交点就是加工中心机床的机床坐标原点,各轴方向按规定确定。
工件坐标系则是编程人员在编写加工程序时在工件上建立的坐标系,这种坐标的建立往往只考虑编程的方便性,一般不考虑工件在机床中的位置。
工件坐标系的各轴方向应保证与机床坐标系的对应轴方向一致,同时工件坐标系的原点即程序原点在机床坐标系中的位置也必须明确。
通常当机床回零后,测量程序原点相对于机床原点的偏置量确定两坐标关系。
图示1为程序原点相对于机床原点分别在三个坐标方向的偏置量。
图12坐标系的设置操作关于工件坐标系的设置方法有三种。
用G92建立工件坐标系的程序段是: G92XαYβZγ程序中字母α、β和γ是刀具刀位点在工件坐标系的坐标值,其实质就是刀具相对于工件坐标系的原点的偏置值。
工件坐标系指令
工件坐标系指令
工件坐标系(Work Coordinate System,WCS)在机械加工中是非常重要的概念,它定义了机床上的工件相对于机床坐标系的位置和方向。
在 CNC(Computer Numerical Control,数控)编程中,你需要使用相应的指令来设置和切换工件坐标系。
以下是一些常见的 CNC 编程语言中用于工件坐标系的指令:
1. G54-G59(G代码):选择工件坐标系
这些 G 代码用于选择工件坐标系。
例如:
G54: 选择工件坐标系 #1
G55: 选择工件坐标系 #2
以此类推,直到 G59
G54 ; 选择工件坐标系 #1
G55 ; 选择工件坐标系 #2
2. G92(G代码):设置工件坐标系偏移
G92 用于设置工件坐标系的偏移。
它通常用于零点设定,将机床坐标系的零点移动到工件上的某个点。
G92 X0 Y0 Z0 ; 将机床坐标系的零点设置为工件坐标系的原点
3. 工件坐标系偏移值(常量)
在一些 CNC 编程语言中,你可以直接指定工件坐标系的偏移值。
#100=10.0 ; 将 X 轴的工件坐标系偏移值设置为 10.0
#101=5.0 ; 将 Y 轴的工件坐标系偏移值设置为 5.0
4. G92.1(G代码):取消工件坐标系偏移
G92.1 用于取消工件坐标系的偏移,将其重新设置为零。
G92.1 ; 取消工件坐标系的偏移
这些指令的确切语法和功能可能会根据 CNC 控制器的型号和制造商而有所不同。
在编写 CNC 程序时,请参考相应的 CNC 控制器文档以确保正确的使用和理解。
数控机床g54坐标系设定方法
数控机床g54坐标系设定方法数控机床是现代制造业中广泛使用的一种加工设备,它能够通过程序控制实现高精度、高效率的加工。
而在数控机床的加工过程中,坐标系的设定是非常重要的,它能够确定工件和刀具之间的相对位置,使加工过程更加精确和稳定。
本文将详细介绍数控机床中的G54坐标系设定方法。
G54坐标系是数控机床中常用的一个工件坐标系,它是基准坐标系的一种扩展。
在数控机床中,通常会有多个工件坐标系,每个工件坐标系都有自己的编号,G54就是其中之一。
G54坐标系的设定方法如下:1. 首先,需要清空机床的坐标系,确保没有其他坐标系的影响。
可以通过输入G92.1指令来实现清空坐标系的操作。
2. 然后,需要确定工件坐标系的原点位置。
原点位置通常选择在工件的某个特定点上,比如工件的中心点或者某个固定的参考点。
确定好原点位置后,将工件放置在机床上,并用夹具固定好。
3. 接下来,需要将刀具对准工件的原点位置。
可以通过手动操作或者辅助设备来实现刀具的对准。
对准好刀具后,可以使用手动模式进行试切,以确保刀具的位置和工件的原点位置一致。
4. 在刀具对准完成后,可以开始设定G54坐标系。
首先,需要输入G10指令,该指令用于设定坐标系编号和坐标系的原点位置。
比如,可以输入G10 L2 P1 X0 Y0 Z0,表示设定G54坐标系编号为1,原点位置为X=0,Y=0,Z=0。
5. 设定好G54坐标系后,可以通过输入G54指令来激活该坐标系。
激活后,机床将以G54坐标系为基准进行加工操作。
需要注意的是,数控机床中的坐标系设定是一个非常精细和复杂的过程,需要操作人员具备一定的技术和经验。
在实际操作中,还需要根据具体的加工要求和工件特点,选择合适的坐标系和坐标系原点位置。
除了G54坐标系,数控机床中还有其他常用的坐标系,如G55、G56等。
每个坐标系都有自己的编号和原点位置,操作人员可以根据需要进行选择和设定。
G54坐标系的设定是数控机床加工过程中非常重要的一步。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
工件坐标的设定说明
IRC5 Controller Maintenance
机器人的坐标系统
设定工件坐标是进行示教的前提, 所有的示教点都必需在对应的工件 坐标中建立。如果在wobj0上建立示 教点,如果机器人在搬动以后就必 须重教所有的点。如果有是在对应 的工件坐标上示教的话就可以只修 改一下工件坐标,而无需重教所有 的点
© ABB University -2
IRC5 Controller Maintenance
正确设定工件坐标的必要性
不准确的工件坐标 ,使机器人在工件 对象上的X/Y方向 移动变得困难
准确的工件坐标, 使机器人在工件对 象上的X/Y方向移 动变得轻松
红色 X方向
绿色 Y方向
© ABB University -3
IRC5 Controller Maintenance
A 在示教器创建一个wobj1项目
1.选择“工件坐标 ”
设定为框中数值 2.选择“新建”
© ABB University -4
3.选择“确定”
IRC5 Controller Maintenance
B 开始定义工件坐标
2.设定为”3点“ 1.选择“编辑”中 的“定义”
3.将机器人移至 此处为X1点
X
© ABB University -5
Y
4.选取X1,然后 点击“修改位置 ”
IRC5 Controller Maintenance
B 定义工件坐标
5.将机器人移至 此处为X2点
X
Y
6.选取X2,然后 点击“修改位置 ”
XБайду номын сангаас
7.将机器人移至 此处为Y1点
© ABB University -6
Y
8.选取Y1,然后 点击“修改位置 ”
IRC5 Controller Maintenance
B 定义工件坐标、验证工件坐标准确度
1、设定为框中数值
9.点击“确定 ”
2、在工件坐标中线 性移动机器人
© ABB University -7