实验二 连续时间系统的频率响应
信号与系统仿真作业

nGDOU-B—11—112广东海洋大学学生实验报告书(学生用表)课程名称课程号学院(系)信息学院专业班级学生姓名学号实验地点04002 实验日期实验一连时间信号的MATLAB表示和连续时间LTI系统的时域分析一、实验目的1.掌握MA TLAB产生常用连续时间信号的编程方法,并熟悉常用连续时间信号的波形和特性;2.运用MATLAB符号求解连续系统的零输入响应和零状态响应;3.运用MATLAB数值求解连续系统的零状态响应;4.运用MATLAB求解连续系统的冲激响应和阶跃响应;5.运用MATLAB卷积积分法求解系统的零状态响应。
二、实验原理1. 连续信号MATLAB实现原理从严格意义上讲,MA TLAB数值计算的方法并不能处理连续时间信号.然而,可用连续信号在等时间间隔点的取样值来近似表示连续信号,即当取样时间间隔足够小时,这些离散样值能够被MATLAB处理,并且能较好地近似表示连续信号.MATLAB提供了大量生成基本信号的函数.比如常用的指数信号、正余弦信号等都是MATLAB的内部函数。
为了表示连续时间信号,需定义某一时间或自变量的范围和取样时间间隔,然后调用该函数计算这些点的函数值,最后画出其波形图.三、实验内容1.实例分析与验证根据以上典型信号的MA TLAB函数,分析与验证下列典型信号MA TLAB程序,并实现各信号波形图的显示,连续信号的图形显示使用连续二维图函数plot().(1)正弦信号:用MA TLAB命令产生正弦信号2sin(2/4)ππ+,并会出时间0≤t≤3的波形图。
程序如下:K=2;w=2*pi ;phi=pi/4;t=0:0.01:3;ft=K*sin (w*t+phi );plot(t,ft ),grid on ;axis ([0,3,-2。
2,2.2])title (’正弦信号’)(2) 抽样信号:用MA TLAB 中的sinc(t)函数命令产生抽样信号Sa(t),并会出时间为66t ππ-≤≤的波形图。
北航信号与系统第一次实验报告超级详细版【范本模板】
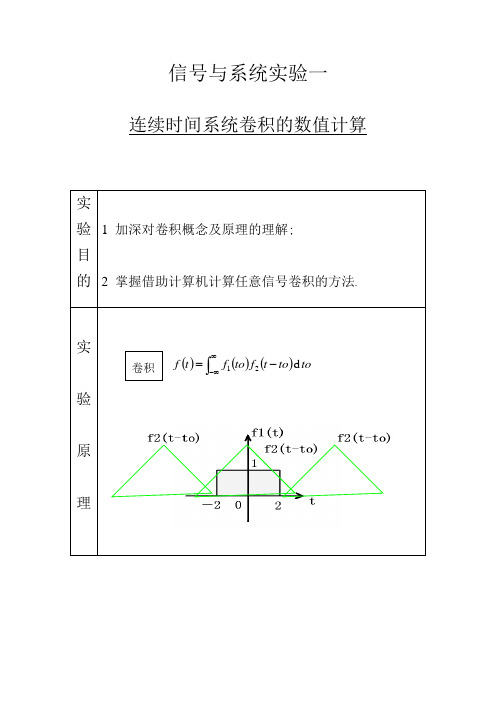
信号与系统实验一连续时间系统卷积的数值计算实验目的1 加深对卷积概念及原理的理解;2 掌握借助计算机计算任意信号卷积的方法.实验原理()()()tototftoftf d21⎰∞∞--=卷积实验流程图源程序#include 〈stdio。
h〉float u(float t){while(t〉=0)return(1);while(t<0)return(0);}float f1(float t){return(u(t+2)—u(t-2));}float f2(float t){return(t*(u(t)-u(t-2))+(4-t)*(u(t-2)—u(t-4)));}main(){float t,i,j,result=0;for(i=—2;i<=6;i=i+0.1){result=0;for(j=0;j<=4;j=j+0.1)result+=f2(j)*f1(i—j)*0。
1;printf("%.1f\t%.2f\t",i,result);}printf ("\n”);}实验数据—2。
0 0。
00 —1.9 0.01 —1.8 0。
03 —1。
7 0.06 -1。
6 0.10—1。
5 0.15 -1。
4 0。
21 —1.3 0。
28 -1。
2 0。
36 —1.1 0。
45-1.0 0.55 -0.9 0.66 -0。
8 0。
78 -0.7 0。
91 -0。
6 1。
05-0.5 1.20 -0.4 1。
36 -0.3 1.53 -0。
2 1.71 —0。
1 1.90 0.0 2.10 0。
1 2。
29 0。
2 2.47 0。
3 2。
64 0。
4 2。
800。
5 2。
95 0。
6 3.09 0.7 3.22 0。
8 3。
34 0.9 3。
451。
0 3。
55 1。
1 3。
64 1.2 3。
72 1.3 3.79 1。
4 3.85 1。
5 3。
90 1.6 3.94 1.7 3。
管致中《信号与线性系统》(第5版)(章节题库 连续时间系统的频域分析)
)。(填“因果”或“非因果”)
【答案】时变、因果
【解析】根据时不变的定义,当输入为 x(t-t0)时,输出也应该为 y(t-t0)=
(
t
t0
5
) cos(
x(
t
1
பைடு நூலகம்t0
)
)
但当输入
x(t-t0)时实际的输出为 (
t
5
) cos(
x(
t
1
t0
)
)
,
与要求的输出不相等,所以系统是时变的,因果性的定义是指系统在 t0 时刻的响应只与
【解析】无失真传输的定义:无失真是指响应信号与激励信号相比,只是大小与出现
的时间不同,而无波形上的变化。
3.若某系统对激励 e(t)=E1sin(ω1t)+E2sin(2ω1t)的响应为 r(t)
=KE1sin(ω1t-φ1)+KE2sin(2ω1t-2φ1),响应信号是否发生了失真?(
)(失真
或不失真)
A.W B.2W C.ω0
1 / 97
圣才电子书
D.ω0-W
十万种考研考证电子书、题库视频学习平 台
【答案】B
【解析】f(t)乘上 cos(ωt0+θ)实际上就是对信号进行调制,将原信号的频谱搬
移到- 0 和 0 的位置,由于 ω0>>W,所以频谱无重叠,则频谱宽度为原来的 2 倍
答:因为
Sa
0t
0
G20
,所以
故 故得
4.图 4-3(a)所示系统,已知输入信号 f(t)的 F(jω)=G4(ω),子系统函数 。求系统的零状态响应 y(t)。
图 4-3 答:F(jω)的图形如图 4-3(b)所示。
系统的频率响应函数
系统的频率响应函数系统的频率响应函数是描述系统输入与输出之间的频率关系的数学函数。
它通常表示为H(ω),其中H是频率响应函数的符号,ω表示频率。
频率响应函数可以是连续时间系统的拉普拉斯变换,也可以是离散时间系统的Z变换。
在以下的讨论中,我们将主要关注连续时间系统的频率响应函数。
频率响应函数对系统的稳态性能和滤波特性具有重要的影响,因此对于系统的设计和分析来说是非常关键的。
下面我们将介绍一些关于系统频率响应函数的重要概念和性质。
1.频率响应函数的定义:频率响应函数是系统的输出与输入之间的幅度和相位关系的数学表示。
在连续时间系统中,频率响应函数H(ω)可以表示为系统的拉普拉斯变换:H(ω)=G(jω)其中,G(s)是系统的传递函数,s是复变量,j是虚数单位。
2. 幅频特性:系统的幅频特性是频率响应函数的幅度分布关系。
它决定了系统对不同频率的输入信号的放大或衰减程度。
通常用幅度特性曲线表示,可以是Bode图、奈奎斯特图等。
幅频特性的分析可以帮助我们了解系统的增益衰减情况和频率选择性能。
3.相频特性:系统的相频特性是频率响应函数的相位分布关系。
它决定了系统对不同频率的输入信号的相位变化。
相频特性也通常用相位特性曲线表示。
相频特性的分析可以帮助我们了解系统的相位延迟和相位失真情况。
4.幅相特性的分离:频率响应函数可以分解为幅度响应函数和相位响应函数的乘积形式:H(ω)=,H(ω),*ϕ(ω)其中,H(ω),表示幅度响应函数,ϕ(ω)表示相位响应函数。
幅相特性的分离可以使系统的分析更加方便和直观。
5.系统的稳定性:频率响应函数对系统的稳态性能具有重要影响。
当频率响应函数在所有ω值处有界时,系统是稳定的。
稳态性能的分析可以通过频率响应函数的幅值来进行,以确定系统的增益补偿。
6.频率响应函数的设计:频率响应函数的设计可以通过选择适当的系统传递函数来实现。
通常,需要根据特定的系统要求和设计目标来选择合适的传递函数,以达到所需的频率响应特性。
二阶系统的频率响应与频率特性测量

实验四二阶系统的频率响应与频率特性测量一、实验目的1掌握频率特性的实验测试方法,进一步理解频率特性的物理意义2•掌握根据频率响应实验结果绘制Bode图的方法3•根据二阶系统的Bode图,确定系统的数学模型4•掌握二阶系统的频域指标与时域指标的对应尖系二、实验仪器与设备1自动控制原理学习机2•计算机(安装自动控制原理实验系统)3.万用表及接线三、实验原理1.输入、输出波形直接测试法如图4-1所示,给定的被测对象是一个稳定的系统。
由实验系统提供正弦信号,每选择一个频率,即可利用实验系统获得输入、输出随时间变化的曲线,取输出稳定后同周期的输入、输出曲线如图4・2。
图测量被控系统的频率响应图4・2稳定后系统的输入输出曲线幅频特性G(j°)2X m(o) 相频特性ZG(jco) =- * x 360T2.李沙育图形法取被测对象某一选定频率下的输入信号x (t)和输出信号y (t)(去掉不稳定部分),利用实验系统做X-Y图'得到一个椭圆图形‘如图4-3所示。
x(t 2Ym2Y Q)J L2Xm图4-3李沙育图形幅频特性:相频特性:如图4-3,椭圆长轴在第一、三象限尸討若椭圆长轴在第二、四象限,:=180o-sin-1^a2Ym® )随着角频率的增加,大多数情况下椭圆逆时针运动,表明输出信Y( t)滞后于输入号信号X ( t),相位的计算结果要添加一个负号,如果椭圆顺时针运(t)超前于X动,计算结果为正。
(t)'幅值取两倍是为了便于测量。
3.测试频率的选取选取合适的实验测试频率范围是准确确定系统频率特性的尖控制系统多为低通滤波辖y在频率很低时,系统的输出能够复现输入信号,通常,取被测对象转折频率的1/10作为起始测试频率,若对象模型未知,则先确定最大测试频率,方法是先测出输入信号频率为0时输出的幅值Y (0),逐渐增大输入信号频率,直至输岀幅值Ym为丫( 0) / ( 50-100), 此时频率便可确定为最大测试频率,测试频率可以在0与「max之间选取若干点。
信号与系统连续时间系统的频率响应

实验报告实验名称:连续时间系统的频率响应一、实验目的:1 加深对连续时间系统频率响应理解;2 掌握借助计算机计算任意连续时间系统频率响应的方法。
二、实验原理:连续时间系统的频率响应可以直接通过所得表达式计算,也可以通过零极点图通过用几何的方法来计算,而且通过零极点图可以迅速地判断系统的滤波特性。
根据系统函数H(s)在s平面的零、极点分布可以绘制频响特性曲线,包括幅频特性 H(jw) 曲线和相频特性?(w)曲线。
这种方法的原理如下:假定,系统函数H(s)的表达式为当收敛域含虚轴时,取s = jw,也即在s平面中,s沿虚轴从- j∞移动到+ j∞时,得到容易看出,频率特性取决于零、极点的分布,即取决于Zj 、Pi 的位置,而式中K是系数,对于频率特性的研究无关紧要。
分母中任一因子(jw- Pi )相当于由极点 p 引向虚轴上某点 jw的一个矢量;分子中任一因子(jw-Zj)相当于由零点Zj引至虚轴上某点 jw的一个矢量。
在右图示意画出由零点Zj和极点 Pi 与 jw点连接构成的两个矢量,图中Nj、Mi 分别表示矢量的模,ψj、θi 表示矢量的辐角(矢量与正实轴的夹角,逆时针为正)。
对于任意零点Zj 、极点Pi ,相应的复数因子(矢量)都可表示为:于是,系统函数可以改写为当ω延虚轴移动时,各复数因子(矢量)的模和辐角都随之改变,于是得出幅频特性曲线和相频特性曲线。
这种方法称为s 平面几何分析。
通过零极点图进行计算的方法是: 1 在S 平面上标出系统的零、极点位置;2 选择S 平面的坐标原点为起始点,沿虚轴向上移动,计算此时各极点和零点与该点的膜模和夹角;3 将所有零点的模相乘,再除以各极点的模,得到对应频率处的幅频特性的值;4 将所有零点的幅角相加,减去各极点的幅角,得到对应频率处的相角。
三、实验内容用 C 语言编制相应的计算程序进行计算,要求程序具有零极点输入模块, 可以手工输入不同数目的零极点。
计算频率从0~5频段的频谱,计算步长为0.1,分别计算上面两个系统的幅频特性和相频特性,将所得结果用表格列出,并画出相应的幅频特性曲线和相频特性曲线。
实验二 测试系统的时域响应和频域响应
实验一测试系统的时域响应【实验目的】1.了解MATLAB软件的基本特点和功能,熟悉其界面、菜单和工具条,熟悉MATLAB程序设计结构及M文件的编制;2.掌握线性系统模型的计算机表示方法;3.掌握求线性定常连续系统时域输出响应的方法,求得系统的时域响应曲线;4. 了解Simulink 的使用。
【实验指导】一、模型的建立:在线性系统理论中,一般常用的数学模型形式有:(1)传递函数模型;(2)状态空间模型;(3)零极点增益模型这些模型之间都有着内在的联系,可以相互进行转换.1、传递函数模型若已知系统的传递函数为:对线性定常系统,式中s的系数均为常数,且an不等于零,这时系统在MATLAB中可以方便地由分子和分母系数构成的两个向量唯一地确定出来,这两个向量分别用num和den表示.num=[cm,c,m-1,…,c1,c0]den=[an,an-1,…,a1,a0]注意:它们都是按s的降幂进行排列的.则传递函数模型建立函数为:sys=tf(num,den).2、零极点增益模型(略)3、状态空间模型(略)二、模型的转换在一些场合下需要用到某种模型,而在另外一些场合下可能需要另外的模型,这就需要进行模型的转换.三、模型的连接1、并联:parallel[num,den]=parallel(num1,den1,num2,den2)%将并联连接的传递函数进行相加.2、串联:series[num,den]=series(num1,den1,num2,den2)%将串联连接的传递函数进行相乘.3、反馈:feedback[num,den]=feedback(num1,den1,num2,den2,sign)%可以得到类似的连接,只是子系统和闭环系统均以传递函数的形式表示.当sign=1时采用正反馈;当sign= -1时采用负反馈;sign缺省时,默认为负反馈.4、闭环:cloop(单位反馈)[numc,denc]=cloop(num,den,sign)%表示由传递函数表示的开环系统构成闭环系统,sign意义与上述相同.四、线性连续系统的时域响应1 求取线性连续系统的阶跃响应函数为(step) 基本格式为:step(sys) step(num,den)【实验内容】1. 典型一阶系统的传递函数为 11)(+=s s G τ;τ为时间常数,试绘出当τ=0.5、1、 2、4、6、8、时该系统的单位阶跃响应曲线。
信号与系统 连续时间LTI系统的频率响应
信号与系统
三、频率响应的计算
从而得幅频响应为
H ω 1 2 ω RC
2
相频特性为
( )
π arctan CRω 2
H j ω
1
2
0
j ω
2
信号与系统
有始信号通过线性电路的瞬态分析
例:已知 e(t ) 2 u t u t ,求零状态响应u0 t
上述两式称为希尔伯特变换对。 说明: 具有因果性系统的频率响应的实部 H R ( ) 被已 知的虚部 H I ( ) 唯一地确定,反过来也一样。 推广:上述结论可以推广到因果信号 f (t ) f (t )u (t )
F ( ) FR ( ) jFI ( )
则 FR ( ) 和 FI ( ) 之间也构成希尔伯特变换对。
信号与系统
三、频率响应的计算
例: 已知电路如图所示,试求该系统 的频率响应 H(ω) 。
V1
C
R V2
解:对于电路系统,用相量分析法求它的频率响应 求输出信号相量与输入信号的相量之比, 即为电路系 统的频率响应
1 R, L, C 复阻抗分别为 R, jL, jC 根据分压原理得 V2 ( ) R j H 1 V1 ( ) R 1 j jC RC
H( )
2
d
注意:只是系统物理可实现的必要条件,而非充分条件。
信号与系统
(4) 因果系统的频率响应的实部和虚部具有某种相互制约的
特性。
对于因果系统,其冲激响应h (t)可表示为 h(t ) h(t )u(t ) 由傅立叶变换的频域卷积性质,可得
实验2连续时间系统的模拟
信号与系统实验指导书编写:高玉芹、丁洪影、朱永红信电工程学院2014-7-11前言“信号与系统”是无线电技术、自动控制、通信工程、生物医学电子工程、信号图象处理、空间技术等专业的一门重要的专业基础课,也是国内各院校相应专业的主干课程。
当前,科学技术的发展趋势既高度综合又高度分化,这要求高等院校培养的大学生,既要有坚实的理论基础,又要有严格的工程技术训练,不断提高实验研究能力、分析计算能力、总结归纳能力和解决各种实际问题的能力。
21世纪要求培养“创造型、开发型、应用型”人才,即要求培养智力高、能力强、素质好的人才。
由于该课程核心的基本概念、基本理论和分析方法都非常重要,而且系统性、理论性很强,为此在学习本课程时,开设必要的实验,对学生加深理解深入掌握基本理论和分析方法,培养学生分析问题和解决问题的能力,以及使抽象的概念和理论形象化、具体化,对增强学习的兴趣有极大的好处,做好本课程的实验,是学好本课程的重要教学辅助环节。
目录实验一信号的时域表示及变换 (1)实验二连续信号的卷积 (4)实验三阶跃响应与冲激响应 (8)实验四连续系统的频域分析 (12)实验五抽样定理与信号恢复 (23)实验六连续系统的s域分析 (30)实验七连续系统零极点分析 (33)实验一信号的时域表示及变换一、实验目的1. 掌握用matlab软件产生基本信号的方法。
2. 应用matlab软件实现信号的加、减、乘、反褶、移位、尺度变换及卷积运算。
二、实验原理(一)产生信号波形的方法利用Matlab软件的信号处理工具箱(Signal Processing Toolbox)中的专用函数产生信号并绘出波形。
1.产生正弦波t=0:0.01:3*pi;y=sin(2*t);plot(t,y)图1-1 图1-22.产生叠加随机噪声的正弦波t=0:0.01:3*pi;y=10*sin(2*t);s=y+randn(size(t));plot(t,s)3. 产生周期方波t=0:0.01:1;y=square(4*pi*t);plot(t,y)4. 产生周期锯齿波t=(0:0.001:2.5);y=sawtooth(2*pi*30*t);plot(t,y),axis([0 0.2 -1 1])图1-3 图1-45.产生Sinc函数x=linspace(-5,5);y=sinc(x);plot(x,y)图1-5 图1-6 6.产生指数函数波形x=linspace(0,1,100);(或x=0:0.01:1;)y=exp(-x);plot(x,y)(二)信号的运算1.加(减)、乘运算:要求二个信号序列长度相同例1-1t=0:0.01:2;f1=exp(-3*t);f2=0.2*sin(4*pi*t);f3=f1+f2;f4=f1.*f2;subplot(2,2,1);plot(t,f1);title('f1(t)');subplot(2,2,2);plot(t,f2);title('f2(t)');subplot(2,2,3);plot(t,f3);title('f1+f2');subplot(2,2,4);plot(t,f4);title('f1*f2');图1-72.用matlab的符号函数实现信号的反褶、移位、尺度变换由f(t)到f(-at+b)(a>0)步骤:b)atf(b)f(atb)f(tf(t)反褶尺度移位+-−−→−+−−→−+−−→−例1-2:已知f(t)=sin(t)/t,试通过反褶、移位、尺度变换由f(t)的波形得到f(-2t+3) 的波形。
频率响应实验报告
频率响应实验报告频率响应实验报告引言:频率响应是指系统对不同频率输入信号的输出响应程度。
在电子工程和音频领域,频率响应是评估设备或系统性能的重要指标之一。
本文将介绍一次频率响应实验的过程、结果和分析。
实验目的:本次实验的目的是通过测量和分析电子系统的频率响应,评估系统对不同频率信号的传输和处理能力。
通过实验数据的收集和分析,我们可以了解系统在不同频率下的增益和相位特性,并对系统的性能进行评估。
实验装置:本次实验使用了一个信号发生器、一个频谱分析仪和一个待测系统。
信号发生器用于产生不同频率的输入信号,频谱分析仪用于测量系统的输出信号频谱,待测系统是我们需要评估频率响应的对象。
实验步骤:1. 连接实验装置:将信号发生器的输出端与待测系统的输入端相连,将待测系统的输出端与频谱分析仪的输入端相连。
2. 设置信号发生器:选择适当的频率范围和信号波形,并设置合适的输出幅度。
3. 设置频谱分析仪:选择适当的分析带宽和分辨率,并确保频谱分析仪与信号发生器的输出频率范围匹配。
4. 开始实验:逐步改变信号发生器的频率,记录频谱分析仪的输出结果。
5. 收集数据:记录每个频率下频谱分析仪的输出幅度和相位数据。
6. 数据分析:根据收集到的数据,绘制频率响应曲线,并进行进一步的分析和评估。
实验结果:根据实验数据的分析,我们得到了待测系统的频率响应曲线。
该曲线显示了系统在不同频率下的增益和相位特性。
我们可以观察到系统在某些频率下具有较高的增益,而在其他频率下增益较低。
此外,相位特性也可能随频率变化而变化。
实验分析:通过对频率响应曲线的分析,我们可以评估系统对不同频率信号的处理能力。
较高的增益表示系统对该频率信号具有较好的放大能力,而较低的增益可能表示信号在系统中传输过程中的损耗。
相位特性的变化可以影响信号的时间延迟和相位差,从而影响系统对信号的处理结果。
结论:本次实验通过测量和分析电子系统的频率响应,评估了系统对不同频率信号的传输和处理能力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验二 连续时间系统的频率响应39022622 龚小川一.实验目的:1. 进一步加深对连续时间系统频率响应理解;2.掌握借助计算机计算任意连续时间系统频率响应的方法。
二.实验原理1.本实验的基本内容就是将系统函数的幅频特性曲线以及相频特性曲线给画出来。
而系统函数∏∏==--=ni imj j p s z s K s H 11))(()(,令jw s =,则∏∏==--=ni imj j p jw z jw K jw H 11))(()(∑∑∏∏∏∏======-==⇒=∑∑=⇒=-=-==ni imj jni imj jw j ni j i mj j j j i i j j j w MNKjw H e jw H eM eN Kjw H e M p jw eN z jw ni i mj j ij1111)(1][1][)(,)()()(,11θψϕϕθψθψ即(1)计算所有零点模之积及极点模之积,两者之商即为)(s H 的幅度; (2)计算所有零点相角之和及极点相角之和,两者之差即为)(s H 的相角。
2.通过零极点图通过几何的方法来计算,而且通过零极点图可以迅速地判断系统的滤波特性。
通过零极点图进行计算的方法是: (1)在S 平面上标出系统的零极点位置;(2)选择S 平面的坐标原点为起始点,沿虚轴向上移动,计算此时各极点和零点与该点的膜和夹角;(3)将所有零点的模相乘,再除以各极点的模,得到对应频率处的幅频特性的值; (4)将所有零点的幅角相加,减去各极点的幅角,得到对应频率处的相角。
三.实验流程图j>m, 否是输出temp1,即为零点模之积令j=0,temp1=1i>n ?,否是输出temp2,即为极点模之积令i=0,temp2=1输出temp1/temp2,极为H(s)之幅度四.实验代码#include "stdio.h" #include "math.h" #include "graphics.h"float atannew(float t1,float t2); int main() { float z[10][2],p[10][2],out[100][3],f[50]; int a,iout; int i,itemp,k,ktemp,j,m,n; float w,temp1,temp2,prew,pretemp1,pretemp2,ptemp,h,fout; int gdriver,gmode=0; char s[10]; gdriver=0; /**/ for(i=0;i<=10;i++) { a=scanf("%f %fj",&z[i][0],&z[i][1]); if(a!=0); else { fflush(stdin);/*清空输入缓冲区,使得第二个scanf 不被忽略*/ for(k=0;k<=10;k++)j>m否是输出temp1,即为零点相角之和令j=0,temp1=0i>n ?否是输出temp2,即为极点相角之和令i=0,temp2=0输出temp1-temp2,极为H(s)之相角{a=scanf("%f %fj",&p[k][0],&p[k][1]);if(a!=0);elsebreak;}break;}}/**/initgraph(&gdriver,&gmode, "e:\\tc\\bgi"); setbkcolor(10);setcolor(4);setlinestyle(1,0,1);rectangle(50,20,600,420);for(ptemp=20;ptemp<=420;ptemp=ptemp+50) line(50,ptemp,600,ptemp);for(ptemp=50;ptemp<=600;ptemp=ptemp+50) line(ptemp,20,ptemp,420);setlinestyle(0,0,1);setcolor(1);line(200,20,200,420);line(50,420,600,420);line(200,20,190,30);line(200,20,210,30);outtextxy(210,30,"A");line(600,420,590,410);line(600,420,590,430);outtextxy(600,430,"w");for(iout=0;iout<=5;iout++){sprintf(s,"%d",iout);outtextxy(iout*50+200,430,s);}for(fout=1.0;fout<=8;fout=fout+1){sprintf(s,"%.1f",fout/10);outtextxy(170,420-fout*50,s);}setcolor(4);/*printf("w 幅度相角\n");*/for(w=0,j=0;w<=5.0;j++){temp1=1;for(itemp=0;itemp<=i-1;itemp++)temp1=temp1*sqrt(z[itemp][0]*z[itemp][0]+(z[itemp][1]-w)*(z[itemp][1]-w));for(ktemp=0;ktemp<=k-1;ktemp++)temp1=temp1/sqrt(p[ktemp][0]*p[ktemp][0]+(p[ktemp][1]-w)*(p[ktemp][1]-w));out[j][0]=w;out[j][1]=temp1;if(j>0)line(prew*40+200,420-pretemp1*500,w*40+200,420-temp1*500);prew=w;pretemp1=temp1;w=w+0.1;}for(m=0;m<=50;m++){if(out[m][1]>out[m+1][1])break;}printf("%.4f,%f",out[m][1],out[m][0]);line(100,420-out[m][1]/sqrt(2)*500,500,420-out[m][1]/sqrt(2)*500);getch();closegraph();initgraph(&gdriver,&gmode, "e:\\tc\\bgi");setbkcolor(10);setcolor(4);setlinestyle(1,0,1);rectangle(50,20,600,420);for(ptemp=20;ptemp<=420;ptemp=ptemp+50)line(50,ptemp,600,ptemp);for(ptemp=50;ptemp<=600;ptemp=ptemp+50)line(ptemp,20,ptemp,420);for(w=0,j=0;w<=5;j++){temp2=0;for(ktemp=0;ktemp<=k-1;ktemp++)temp2=temp2-atannew(-p[ktemp][0],w-p[ktemp][1]);for(itemp=0;itemp<=i-1;itemp++)temp2=temp2+atannew(-z[itemp][0],w-z[itemp][1]);if(temp2>=180)temp2=temp2-360;else if(temp2<=-180)temp2=temp2+360;out[j][2]=temp2;if(j>0)line(prew*50+200,180+pretemp2,w*50+200,180+temp2);prew=w;pretemp2=temp2;w=w+0.1;}getch();closegraph();for(j=0;j<=50;j++)printf("%.2f,%.4f,%.2f***",out[j][0],out[j][1],out[j][2]);printf("\n\n");for(n=0,j=0;n<=50;n++)f[n]=fabs(out[m][1]/sqrt(2)-out[n][1]);for(n=0,h=f[0],j=0;n<=m;n++){if(h>f[n]){h=f[n];j=n;}}printf("Fl=%.1f\n",out[j][0]);for(n=m,h=f[0],j=0;n<=50;n++){if(h>f[n]){h=f[n];j=n;}}printf("Fh=%.1f",out[j][0]);getch();return 0;}float atannew(float t1,float t2){if(t1>0&&t2>0)return atan(t2/t1)/3.14*180;else if(t1<0&&t2<0)return 180+atan(t2/t1)/3.14*180;else if(t1<0&&t2>0)return 180+atan(t2/t1)/3.14*180;else if(t1>0&&t2<0)return atan(t2/t1)/3.14*180;else if(t1==0&&t2>0)return 90;else if(t1==0&&t2<0)return -90;else if(t1==0&&t2==0)return 0;else if(t1>0&&t2==0)return 180;else if(t1<0&&t2==0)return -180;}五.实验数据及所绘图形横线3dB线。
Fl=0.7,Fh=2.7.零点z1=2+1.5j,z2=2-1.5j;极点p1=-0.5-0.7j,p2=-0.5+0.7j,p3=-2.5-2j,p4=-2.5+2j0.0 0.823995 197.606976 2.5 0.125927 -30.168391 0.1 0.827748 188.753095 2.6 0.117968 -34.228230 0.2 0.838357 179.054798 2.7 0.110810 -38.136293 0.3 0.853583 168.286633 2.8 0.104336 -41.899355 0.4 0.868832 156.232443 2.9 0.098449 -45.523151 0.5 0.876442 142.775678 3 0.093071 -49.012709 0.6 0.866588 128.047702 3.1 0.088137 -52.372588 0.7 0.830997 112.553808 3.2 0.083592 -55.607056 0.8 0.769583 97.107608 3.3 0.079392 -58.7202040.9 0.691002 82.523335 3.4 0.075499 -61.7160311.0 0.607503 69.308133 3.5 0.071880 -64.598482 1.1 0.528568 57.596395 3.6 0.068509 -67.371483 1.2 0.458892 47.275738 3.7 0.065362 -70.038943 1.3 0.399643 38.134987 3.8 0.062418 -72.604758 1.4 0.350120 29.9547293.9 0.059661 -75.072798 1.5 0.308962 22.544718 4 0.057073 -77.446896 1.6 0.274727 15.7524114.1 0.054642 -79.730837 1.7 0.246120 9.459839 4.2 0.052356 -81.928340 1.8 0.222060 3.577246 4.3 0.050202 -84.0430451.9 0.201673 -1.963215 4.4 0.048172 -86.0785052.0 0.184259 -7.212759 4.5 0.046255 -88.038170 2.1 0.169266 -12.210079 4.6 0.044446 -89.925384 2.2 0.156252 -16.984488 4.7 0.042735 -91.743374 2.3 0.144867 -21.558279 4.8 0.041115 -93.495252 2.4 0.134834 -25.9485194.9 0.039582 -95.184004此系统为低通滤波器,横线为3dB线。