作为旋转变换之生成元的角动量
角动量及其守恒定律

m r2 r1 J0
22
因为 1 2, 1 1 2 E k 1 J 1 1 ( J 1 1 ) 1 2 2 相 E k1 E k 2 等 1 1 2 E k 2 J 2 2 ( J 2 2 ) 2 2 2 即系统的机械能不守恒。
23
人双臂收回过程中,内力做功,
J 2
l/2
r dr
2
1 12
l
3
0
1 12
ml
2
如转轴过端点垂直于棒 l 1 2 J r d r ml 2 0 3
例3 一质量为 m 、半径为 R 的均匀圆盘,求通 过盘中心 O 并与盘面垂直的轴的转动惯量 .
解 设圆盘面密度为 , 在盘上取半径为 r ,宽为 d r 的圆环
v M (2 gh )
u l 2
1 2
M
h N
B
l 2 1 12
2
2
把M、N和跷板作为 一个系统, 角动量守恒
mvM l 2 J 2 mu
C l
m l 1 2 1 6 m ( 2 gh )
A l/2
ml
2
解得
mvMl 2 m l
2
2
12 ml
2
2 2 2
质量连续分布刚体的转动惯量
J
m
j
j j
r
2
r dm
2
d m :质量元
例2 一质量为 m 、长为 l 的均匀细长棒,求 通过棒中心并与棒垂直的轴的转动惯量 .
O
l 2
O
dr
l 2
r
dr
O´
转动惯量与角动量
转动惯量与角动量转动惯量和角动量是物理学中两个重要的概念,它们在描述物体旋转运动时起到关键作用。
本文将介绍转动惯量和角动量的定义、计算公式以及它们之间的关系。
一、转动惯量的定义和计算转动惯量是描述物体对旋转运动的惯性大小,它与物体的质量分布以及旋转轴的位置有关。
设物体的质量为m,将其分为n个微元,每个微元质量为dm,离旋转轴的距离为r,则微元的转动惯量为dI =r²dm。
整个物体的转动惯量I是所有微元转动惯量之和的积分形式,即I = ∫r²dm。
对于一些常见几何体,可以通过坐标系和得到的积分形式计算转动惯量。
例如,对于一个质量为m、半径为R的均匀圆盘,其转动惯量可以通过公式I = 1/2mR²得到;对于一个质量为m、边长为a的均匀正方体,其转动惯量可以通过公式I = 1/6ma²得到。
二、角动量的定义和计算角动量是描述物体旋转运动状态的物理量,它与物体的质量、速度和旋转轴的位置有关。
角动量的定义是L = Iω,其中L为角动量,I为转动惯量,ω为角速度。
可以看出,角动量与转动惯量和角速度的乘积有关。
对于质点的旋转,它的角动量可以通过L = mvr得到,其中m为质量,v为质点的线速度,r为质点与旋转轴的距离。
对于多个质点组成的系统,系统的总角动量L等于各个质点角动量之和的矢量和。
即L = L1 + L2 + ... + Ln。
三、转动惯量与角动量的关系转动惯量和角动量在物体旋转运动中是密切相关的。
根据角动量的定义L = Iω和角动量守恒定律,当外力矩为零时,旋转系统的角动量保持不变。
我们可以利用转动惯量和角动量的关系来简化一些旋转问题的分析。
例如,当一个物体绕固定轴旋转时,如果原先转动惯量较大,那么当转动惯量减小时,角速度会增加,以保持角动量守恒。
四、结论转动惯量和角动量是描述物体旋转运动的重要概念。
转动惯量是物体对旋转的惯性大小,可以通过质量分布和旋转轴的位置来计算。
第三章、角动量

h
(m +盘) 由(1)(2)(3)得: M
O R
,
m
1 I MR 2 mR 2 2mR 2 (3) 2 2 gh (4) 0 cos 2R
对(m + M +地球)系统,
·
1 2 1 2 (5) mgR sin I0 I 2 2 (3)(4)(5)得: 1 g gh g 2 . ( h 4 3 R) cos sin 2 2R 2 R 2R ( 60 ) M mgR g 2 I 2mR 2R
Nl
N l
A
· a θC · N a
O
Cl
l,m
t
Ct
θ
B
(3)
t :mg cos N t maCt l 2 6 aCl g sin 7 4 l mg cos l l 4 3 g cos aCt 7 4 4 JO
t l : mg sin Nl maCl
2 i i
vi o ri mi
L I
刚体对固定转动轴的角动量L,等于它对该轴的转动惯 量和角速度的乘积。
d d I dL 由转动定律: M I I dt dt dt
角动量定理微分式:
2、刚体的角动量定理
Mdt 称为dt时间内刚体所受合外力矩的冲量矩 t2 M dt L2 L1 I 22 I11
r dr R e
d
解 由于摩擦力不是集中作用于一点,而是分布在 整个圆盘与桌子的接触面上,力矩的计算要用积分 法。在图中,把圆盘分成许多环形质元,每个质元 的质量dm=rddre,所受到的阻力矩是rdmg 。
大学物理_角动量_转动惯量汇总

都垂直纸面向里
例2:有一个质量为 m = 1 kg 的物体, 在力 F 12t 2i 6tj 2k (SI单位制) 的作用下运动。 当 t = 0 时,r0 0, v0 0. 求: t = 1s时对原点 M ? L ? 此1s内,力所做的功?对物体冲量?
M r F
L
p
L rmv mr 2
o
r
m
质点作匀速率圆周运动时,角动量是恒量。
3) 在直角坐标系中,角动量的表达式为:
Lr p x y z p x p y pz Lx i Ly j Lz k
i Lr p x px j y py
质点角动量定理的微分形式: dL Mdt
dL M dt
t2
t1
Mdt L2 L1
冲量矩
t2
t1
M dt
质点的角动量定理:对同一参考点 O ,质点所受到 的冲量矩等于质点角动量的增量。
注意: 定理中的力矩和角动量都必须是相对于同一 参考点而言的。 说明: (1) 冲量矩是质点角动量变化的原因。 (2) 质点角动量的变化是力矩对时间的积累的结果。
冲量、动量、动量定理。
冲量矩、动量矩(角动量)、 角动量定理。
预备知识:二矢量的矢积(叉乘)
A B ( Ae 1 1A 2e2 A 3e3 ) ( B 1e 1 B2e2 B3e3 )
A1B2e1 e2 A2 B1e2 e1 +A2 B3e2 e3 A3B2e3 e2 +A3 B1e3 e1 A1B3e1 e3
刚体(rigid body) :在外力作用下,形状和大小都不 发生变化的物体。(或:任意两质点间距离保持不变 的特殊质点系)。 刚体的运动形式: 平动(translation)、 转动(rotation)。 平动: 刚体内任意两点间连线 的空间方向总保持不变
角动量 角动量守恒定律

h
vN2 2g
1 2g
3mvM m 6m
2
h
3m m 6m
2
19
4-3 角动量 角动量守恒定律
第四章 刚体转动
P104例3 质量很小长度为l 的均匀细杆, 可绕过其中心
O 并与纸面垂直的轴在竖直平面内转动 . 当细杆静止于
水l/4平处位, 置并时背,离有点一O只向小细虫杆以的速端率点vvA0 0垂爬直行落. 设在小距虫点与O细为杆
14
4-3 角动量 角动量守恒定律
比较 动量
F
dP dt
t2
Fdt ΔP
t1
F 0 P 0
F
P
mv
力 动量
t2
Fdt 力的冲量
t1
第四章 刚体转动
角动量
M
dL dt
t2
Mdt ΔL
t1
LMMrrp0F角L力动矩量0或或角动力量矩
其角速度为ω, 求齿轮啮合后两圆盘的角速度.
解: 系统角动量守恒
J11 J22 (J1 J2)
J11 J22
(J1 J2 )
16
4-3 角动量 角动量守恒定律
第四章 刚体转动
P103例2 一杂技演员 M 由距水平跷板高为 h 处自由下
落到跷板的一端 A, 并把跷板另一端的演员 N 弹了起来.
R
x
26
dP
F dt
t2
Fdt ΔP
t1
F 0 P 0
角动量定理及角动量守恒定律
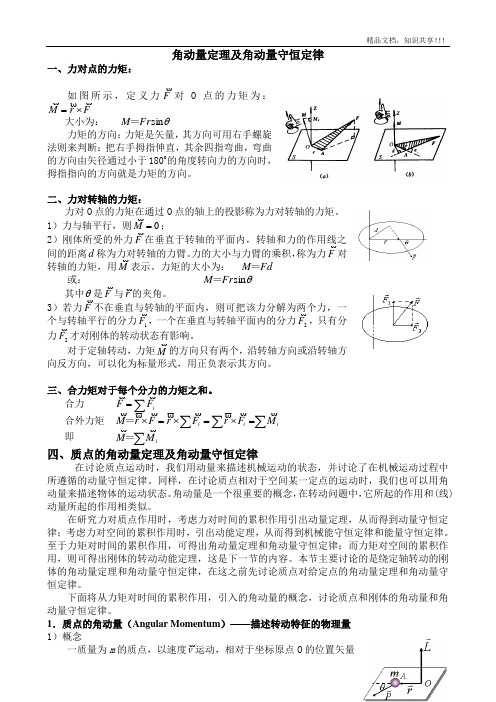
精品文档,知识共享!!!角动量定理及角动量守恒定律一、力对点的力矩:如图所示,定义力F对O 点的力矩为: F r M ⨯=大小为: θsin Fr M = 力矩的方向:力矩是矢量,其方向可用右手螺旋法则来判断:把右手拇指伸直,其余四指弯曲,弯曲的方向由矢径通过小于1800的角度转向力的方向时,拇指指向的方向就是力矩的方向。
二、力对转轴的力矩:力对O 点的力矩在通过O 点的轴上的投影称为力对转轴的力矩。
1)力与轴平行,则0=M;2)刚体所受的外力F在垂直于转轴的平面内,转轴和力的作用线之间的距离d 称为力对转轴的力臂。
力的大小与力臂的乘积,称为力F对转轴的力矩,用M表示。
力矩的大小为: Fd M = 或: θsin Fr M =其中θ是F 与r的夹角。
3)若力F 不在垂直与转轴的平面内,则可把该力分解为两个力,一个与转轴平行的分力1F,一个在垂直与转轴平面内的分力2F ,只有分力2F才对刚体的转动状态有影响。
对于定轴转动,力矩M的方向只有两个,沿转轴方向或沿转轴方向反方向,可以化为标量形式,用正负表示其方向。
三、合力矩对于每个分力的力矩之和。
合力 ∑=i F F合外力矩 ∑∑∑=⨯=⨯=⨯i i i M F r F r F r M=即 ∑i M M=四、质点的角动量定理及角动量守恒定律在讨论质点运动时,我们用动量来描述机械运动的状态,并讨论了在机械运动过程中所遵循的动量守恒定律。
同样,在讨论质点相对于空间某一定点的运动时,我们也可以用角动量来描述物体的运动状态。
角动量是一个很重要的概念,在转动问题中,它所起的作用和(线)动量所起的作用相类似。
在研究力对质点作用时,考虑力对时间的累积作用引出动量定理,从而得到动量守恒定律;考虑力对空间的累积作用时,引出动能定理,从而得到机械能守恒定律和能量守恒定律。
至于力矩对时间的累积作用,可得出角动量定理和角动量守恒定律;而力矩对空间的累积作用,则可得出刚体的转动动能定理,这是下一节的内容。
角动量

M = Fr sin α
d-力臂
α
如图,质点P质量为2kg,位矢r,速度v, 受力F的作用,三个矢量均在Oxy平面 内,r=3.0m,v=4.0m/s,F=2N,则质点对 原点O的角动量为
F v
2 −1
30°
L = r × mv = mvr sin 150° k = 12k [kg ⋅ m ⋅ s ]
f拉 r r ∴ L 2 = L1
2
2
r1 mv 1 = r2 mv
r1 v2 = v1 r2
四 质点系的角动量定理及守恒定律
1.质点系的角动量 定义:质点系内各质点对于参考点 O的角动量的 矢量和称为质点系对O点的角动量 :
v v v v v L = ∑ ri × pi = ∑ ri × m i v i
例、求长为L、质量为m的均匀细棒对图中不同轴的转动惯量。 解:取如图坐标,dm=λdx,λ=m/L A dx L
2
B X dx L/2 B X
IA =
∫ =∫
∫
L 2 L − 2
L
0
L
x dm
mL x λ dx = 3
2
2
A L/2
C
0
IC =
x 2 λ dx = mL 2 / 12
例、求质量为m、半径为R的均匀圆环的转 动惯量。轴与圆环平面垂直并通过圆心。
∫ dI
=
2π
∫
R
R
0
1 ∴ I = mR 2
或: I =
1 σ ⋅ 2 π r dr = σπ R 2
3
2
4
∫∫
0
1 r σ ( rdrd θ ) = mR 2
2
2
角动量转动惯量-2022年学习资料

3.求质量m,半径R的球壳对直径的转动惯量-ds 2ardl 2xRsine.Rde-4πR2-dm=od =上-msin Ode-1-对圆环:d/=r2dm=Rsin0}dm=。mR2sina0-J-∫d=j2m in0-子mR-15
4.求质量m,半径R的球体对直径的转动惯量-解:以距中心r,厚dr的球壳-为积分元-dV =4nr-drR3-2-2mrdr-由上例知:dU=-dm.r2-fw.j-2mrdr 2-mR-5-16
练习-求长L、质量m的均匀杆对z轴的转动惯量-解一:-3L/4-A-n-B-日88883889日88889 88888888898日8888.98日8888989888888888日888883,--∫xm=了宽L-48-I m-7-对同轴的转动惯量才賄可加性:长度的杆绕其右端点0转动:-长度为3L的杆绕其左端点0转 。0为二者共同的转轴。-mE-19
注意:-对同轴的转动惯量才具有可加减性。-平行轴定理-绕质心轴-d-m-8888888887888日888 8:-98888888888图-17
一些均匀刚体的转动惯量表-MOMENTS OF INERTIA OF VARIOUS BODIES-1=5 L2-1=ML2-1=Ma2+b的-aSlender rod.-bSlender rod.-cRectan ular plate,-dThin rectangular plate,-axis through cen er-axis through one end-axis along edge-1=MR,2+R2-I=M 2-1=MR2-1=号MR2-—R→-eHollow cylinder-fSolid cylinder-g hin-walled hollow-hSolid sphere-iThin-walled hollow-1
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3.3.2 Galilei 群的生成元
如前所述,任一单参数幺正算符群都能表示为 一个厄米生成元的指数形式. 上述Galilei 群则包含有10个参数:3个旋转角、 3个空间平移、3个速度分量和1个时间平移. 因 而相应的幺正算符可以表达为
(42)
其中,s 表示定义相应变换的10个参数.
14
3.3.2 Galilei 群的生成元
• 可以证明,分别相应于旋转、空间平移和时间平 移的幺正算符如下:
• 其中,J, P 和 H 即为角动量,动量和能量算符.
15
• 上述这些变换必须满足如下关系:
• (1) 如果Anann ,那么A n= ann.
• (2) 如果=ncnn,其中{n}是A的本征矢, 则变换后的态矢 =ncnn ,其中{n}是
A的本征矢. 两个态矢之间必须满足关系
4
3.3.1 态和算符的变换 生成元
• 用U表示描述上述对称操作的幺正算符,于是 • 利用 •得
5
3.3.1 态和算符的变换 生成元
现在考虑一族依赖于单个连续参量 s 的幺正算符
U(s), 并令 U(0) = I 为单位算符以及
U(s1 + s2) = U(s1)U(s2).
(36)
考虑s非常小的情况,即无穷小幺正变换,此时有
考虑到初始条件U(0) = I , 积分上式
(38)
8
3.3.2 Galilei 群的生成元
3.3.2 Galilei 群的生成元 如上所述,时-空对称变换包括旋转、平移和相 对于惯性系的对称变换. 一般而言,后者由 Lorentz 变换描述,但是如果只限于低速运动情 形,则其可由Galilei 变换代替. 所有这些变换的集合即称之为Galilei 群
第3章 角动量
§3.3 作为旋转变换之生成元的角动量
• 3.3.1 态和算符的变换 生成元 • 现代物理学相信自然在一定的时-空对称操作下
不变;它们包括:平移、旋转和相对作均匀运 动的参考系之间的变换. • 相应于每一这样的时-空变换,必定有态和算符
的变换:AA 和 .
2
3.3.1 态和算符的变换 生成元
|cn|2 = |cn|2;即|n||2 = |n| |2.
3
3.3.1 态和算符的变换 生成元
数学上可以证明(Wigner 定理),对应于上述操 作的算符一定是幺正算符(连续对称变换)、或 反幺正算符(离散对称变换).
对于旋转、平移和相对于惯性系的对称变换而 言,由于他们都是连续变换,故而均由幺正算 符描述.
• 而由
;
态,故而
• 其中, 为相因子。
表示相同的
(40)
11
3.3.2 Galilei 群的生成元
• 当将态矢表示为空-时坐标的函数时,在函
数空间和坐标空间之间存在一个重要的逆关系: (41)
• 这里, 被变换到一新的函数 • 如图所示
12
3.3.2 Galilei 群的生成元
由
记 则 根据定义 最终
9Байду номын сангаас
3.3.2 Galilei 群的生成元
• 变换效果为:
(39)
• 其中,R: 一次旋转(33矩阵),a: 一次平移, v: 运动坐标变换速度,s : 时间平移。
• 下面令 外,令
表示一次这样的变换. 另 ,即
•若
•则 10
3.3.2 Galilei 群的生成元
• 因此,相应于空-时变换,有幺正算符U()使得
幺正条件要求
等于I (不依赖于s). 因此
6
3.3.1 态和算符的变换 生成元
(37)
• 其中,厄米算符K称作该族幺正算符的生成元,因 为它确定了U(s).
• 生成元 K 不仅确定无穷小U(s), 而且能够确定任意 有限大小的U(s),这可从对s2
• 微分看出,利用(37)得
7
3.3.1 态和算符的变换 生成元