计算机控制第四章课后题
计算机组成原理第四章课后题参考答案
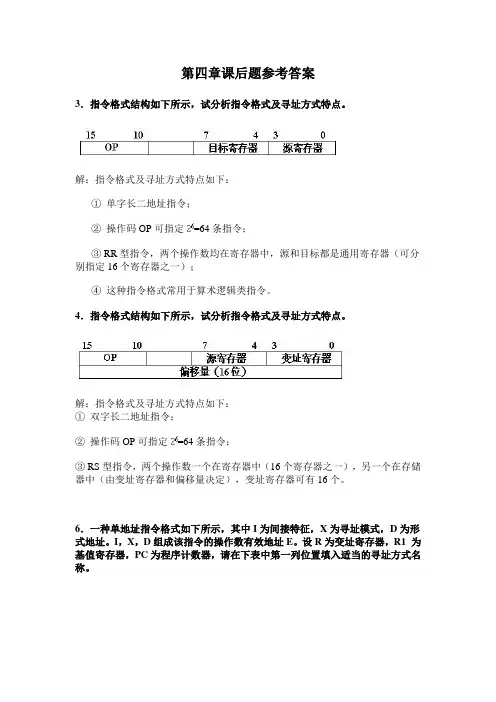
第四章课后题参考答案3.指令格式结构如下所示,试分析指令格式及寻址方式特点。
解:指令格式及寻址方式特点如下:①单字长二地址指令;②操作码OP可指定=64条指令;③ RR型指令,两个操作数均在寄存器中,源和目标都是通用寄存器(可分别指定16个寄存器之一);④这种指令格式常用于算术逻辑类指令。
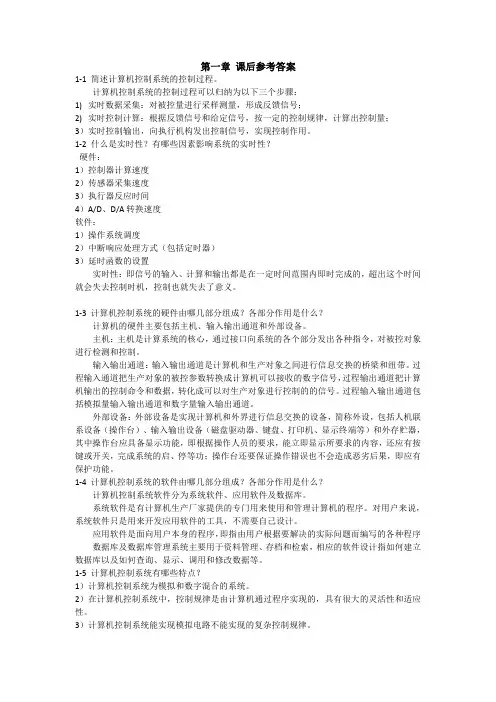
4.指令格式结构如下所示,试分析指令格式及寻址方式特点。
解:指令格式及寻址方式特点如下:①双字长二地址指令;②操作码OP可指定=64条指令;③ RS型指令,两个操作数一个在寄存器中(16个寄存器之一),另一个在存储器中(由变址寄存器和偏移量决定),变址寄存器可有16个。
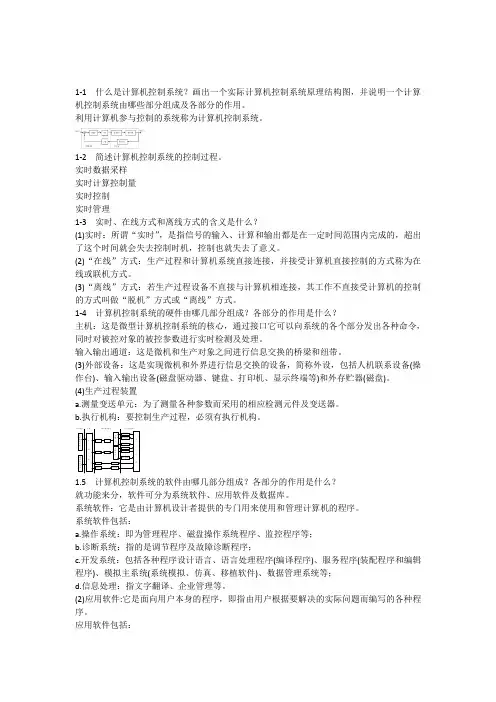
6.一种单地址指令格式如下所示,其中I为间接特征,X为寻址模式,D为形式地址。
I,X,D组成该指令的操作数有效地址E。
设R为变址寄存器,R1 为基值寄存器,PC为程序计数器,请在下表中第一列位置填入适当的寻址方式名称。
解:①直接寻址②相对寻址③变址寻址④基址寻址⑤间接寻址⑥基址间址寻址12. 根据操作数所在位置,指出其寻址方式(填空):(1)操作数在寄存器中,为(A)寻址方式。
(2)操作数地址在寄存器,为(B)寻址方式。
(3)操作数在指令中,为(C)寻址方式。
(4)操作数地址(主存)在指令中,为(D)寻址方式(5)操作数的地址,为某一寄存器内容与位移量之和可以是(E,F,G)寻址方式。
解:A:寄存器直接(或寄存器);B:寄存器间接;C:立即;D:直接;E:相对;F:基址;G:变址补充一下,间接寻址可以表述为:操作数地址(主存)在内存中或者操作数地址的地址(主存)在指令中。
计算机控制系统课后习题答案1
第一章课后参考答案1-1简述计算机控制系统的控制过程。
计算机控制系统的控制过程可以归纳为以下三个步骤:1)实时数据采集:对被控量进行采样测量,形成反馈信号;2)实时控制计算:根据反馈信号和给定信号,按一定的控制规律,计算出控制量;3)实时控制输出,向执行机构发出控制信号,实现控制作用。
1-2什么是实时性?有哪些因素影响系统的实时性?硬件:1)控制器计算速度2)传感器采集速度3)执行器反应时间4)A/D、D/A转换速度软件:1)操作系统调度2)中断响应处理方式(包括定时器)3)延时函数的设置实时性:即信号的输入、计算和输出都是在一定时间范围内即时完成的,超出这个时间就会失去控制时机,控制也就失去了意义。
1-3计算机控制系统的硬件由哪几部分组成?各部分作用是什么?计算机的硬件主要包括主机、输入输出通道和外部设备。
主机:主机是计算系统的核心,通过接口向系统的各个部分发出各种指令,对被控对象进行检测和控制。
输入输出通道:输入输出通道是计算机和生产对象之间进行信息交换的桥梁和纽带。
过程输入通道把生产对象的被控参数转换成计算机可以接收的数字信号,过程输出通道把计算机输出的控制命令和数据,转化成可以对生产对象进行控制的的信号。
过程输入输出通道包括模拟量输入输出通道和数字量输入输出通道。
外部设备:外部设备是实现计算机和外界进行信息交换的设备,简称外设,包括人机联系设备(操作台)、输入输出设备(磁盘驱动器、键盘、打印机、显示终端等)和外存贮器,其中操作台应具备显示功能,即根据操作人员的要求,能立即显示所要求的内容,还应有按键或开关,完成系统的启、停等功;操作台还要保证操作错误也不会造成恶劣后果,即应有保护功能。
1-4计算机控制系统的软件由哪几部分组成?各部分作用是什么?计算机控制系统软件分为系统软件、应用软件及数据库。
系统软件是有计算机生产厂家提供的专门用来使用和管理计算机的程序。
对用户来说,系统软件只是用来开发应用软件的工具,不需要自己设计。
(完整版)计算机控制系统课后习题答案
1-1 什么是计算机控制系统?画出一个实际计算机控制系统原理结构图,并说明一个计算机控制系统由哪些部分组成及各部分的作用。
利用计算机参与控制的系统称为计算机控制系统。
1-2 简述计算机控制系统的控制过程。
实时数据采样实时计算控制量实时控制实时管理1-3 实时、在线方式和离线方式的含义是什么?(1)实时:所谓“实时”,是指信号的输入、计算和输出都是在一定时间范围内完成的,超出了这个时间就会失去控制时机,控制也就失去了意义。
(2)“在线”方式:生产过程和计算机系统直接连接,并接受计算机直接控制的方式称为在线或联机方式。
(3)“离线”方式:若生产过程设备不直接与计算机相连接,其工作不直接受计算机的控制的方式叫做“脱机”方式或“离线”方式。
1-4 计算机控制系统的硬件由哪几部分组成?各部分的作用是什么?主机:这是微型计算机控制系统的核心,通过接口它可以向系统的各个部分发出各种命令,同时对被控对象的被控参数进行实时检测及处理。
输入输出通道:这是微机和生产对象之间进行信息交换的桥梁和纽带。
(3)外部设备:这是实现微机和外界进行信息交换的设备,简称外设,包括人机联系设备(操作台)、输入输出设备(磁盘驱动器、键盘、打印机、显示终端等)和外存贮器(磁盘)。
(4)生产过程装置a.测量变送单元:为了测量各种参数而采用的相应检测元件及变送器。
b.执行机构:要控制生产过程,必须有执行机构。
1.5 计算机控制系统的软件由哪几部分组成?各部分的作用是什么?就功能来分,软件可分为系统软件、应用软件及数据库。
系统软件:它是由计算机设计者提供的专门用来使用和管理计算机的程序。
系统软件包括:a.操作系统:即为管理程序、磁盘操作系统程序、监控程序等;b.诊断系统:指的是调节程序及故障诊断程序;c.开发系统:包括各种程序设计语言、语言处理程序(编译程序)、服务程序(装配程序和编辑程序)、模拟主系统(系统模拟、仿真、移植软件)、数据管理系统等;d.信息处理:指文字翻译、企业管理等。
微型计算机控制技术课后习题答案

第一章计算机控制系统概述习题及参考答案1.计算机控制系统的控制过程是怎样的?计算机控制系统的控制过程可归纳为以下三个步骤:(1)实时数据采集:对被控量的瞬时值进行检测,并输入给计算机。
(2)实时决策:对采集到的表征被控参数的状态量进行分析,并按已定的控制规律,决定下一步的控制过程。
(3)实时控制:根据决策,适时地对执行机构发出控制信号,完成控制任务。
2.实时、在线方式和离线方式的含义是什么?(1)实时:所谓“实时”,是指信号的输入、计算和输出都是在一定时间范围内完成的,即计算机对输入信息以足够快的速度进行处理,并在一定的时间内作出反应并进行控制,超出了这个时间就会失去控制时机,控制也就失去了意义。
(2)“在线”方式:在计算机控制系统中,如果生产过程设备直接与计算机连接,生产过程直接受计算机的控制,就叫做“联机”方式或“在线”方式。
(3)“离线”方式:若生产过程设备不直接与计算机相连接,其工作不直接受计算机的控制,而是通过中间记录介质,靠人进行联系并作相应操作的方式,则叫做“脱机”方式或“离线”方式。
3.微型计算机控制系统的硬件由哪几部分组成?各部分的作用是什么?由四部分组成。
图1.1微机控制系统组成框图(1)主机:这是微型计算机控制系统的核心,通过接口它可以向系统的各个部分发出各种命令,同时对被控对象的被控参数进行实时检测及处理。
主机的主要功能是控制整个生产过程,按控制规律进行各种控制运算(如调节规律运算、最优化计算等)和操作,根据运算结果作出控制决策;对生产过程进行监督,使之处于最优工作状态;对事故进行预测和报警;编制生产技术报告,打印制表等等。
(2)输入输出通道:这是微机和生产对象之间进行信息交换的桥梁和纽带。
过程输入通道把生产对象的被控参数转换成微机可以接收的数字代码。
过程输出通道把微机输出的控制命令和数据,转换成可以对生产对象进行控制的信号。
过程输入输出通道包括模拟量输入输出通道和数字量输入输出通道。
计算机控制技术课后习题答案
第一章1.电脑系统由哪些部分组成?并画出方框图。
解:假设将自动控制系统中控制器的功能用电脑或数字控制装置来实现,就构成了电脑控制系统,其基本框图如图1-1所示。
因此,简单说来,电脑控制系统就是由各种各样的电脑参与控制的一类系统。
图1-1 电脑控制系统基本原理图在电脑控制系统中,控制规律是用软件实现的,电脑执行预定的控制程序就能实现对被控参数的控制。
控制器与执行机构之间是DA转换器,负责将数字信号转换成模拟信号;AD 转换器则相反将传感器采集的模拟信号,转换成数字信号送给控制器。
2.电脑控制系统是怎样分类的?按功能和控制规律可分为几类?解:电脑控制系统与其所控制的对象、采取的控制方法密切相关。
因此,电脑控制系统的分类方法很多,可以按照系统的功能、控制规律或控制方式等进行分类。
按功能及结构分类:操作指导控制系统、直接数字控制系统、监督控制系统、集散控制系统、现场总线控制系统、工业以太网控制系统、综合自动化系统。
按照控制规律分类:程序和顺序控制、比例积分微分控制(简称PID控制)、最少拍控制、复杂规律的控制、智能控制。
3.电脑控制系统的主要特点有哪些?解:主要有以下特点:1.数字模拟混合的系统。
在连续控制系统中,各处的信号是连续模拟信号。
而在电脑控制系统中,除仍有连续模拟信号外,还有离散信号、数字信号等多种信号。
因此,电脑控制系统是模拟和数字的混合系统。
2.灵活方便、适应性强。
一般的模拟控制系统中,控制规律是由硬件电路实现的,控制规律越复杂,所需要的模拟电路往往越多,如果要改变控制规律,一般就必须更改硬件电路。
而在电脑控制系统中,控制规律是由软件实现的,电脑执行预定的控制程序就能实现对被控参数的控制,需要改变控制规律时,一般不对硬件电路作改动,只要改变控制程序就可以了。
3.可实现复杂控制规律。
电脑具有丰富的指令系统和很强的逻辑判断功能,能够实现模拟电路不能实现的复杂控制规律。
4.离散控制。
在连续控制系统中,给定值与反馈值的比较是连续进行的,控制器对产生的偏差也是连续调节的。
计算机控制技术课后题答案整理版(1到5章基本都有了)
第一章1、计算机控制系统是由哪几部分组成的?画出方框图并说明各部分的作用。
答:计算机控制系统由工业控制机、过程输入输出设备和生产过程三部分组成;框图P3。
1)工业控制机主要用于工业过程测量、控制、数据采集、DCS操作员站等方面。
2)PIO设备是计算机与生产过程之间的信息传递通道,在两者之间起到纽带和桥梁的作用。
3)生产过程就是整个系统工作的各种对象和各个环节之间的工作连接。
2、计算机控制系统中的实时性、在线方式与离线方式的含义是什么?为什么在计算机控制系统中要考虑实时性?(1)实时性是指工业控制计算机系统应该具有的能够在限定时间内对外来事件做出反应的特性;在线方式是生产过程和计算机直接相连,并受计算机控制的方式;离线方式是生产过程不和计算机相连,并不受计算机控制,而是靠人进行联系并作相应操作的方式。
(2)实时性一般要求计算机具有多任务处理能力,以便将测控任务分解成若干并行执行的多个任务,加快程序执行速度;在一定的周期时间对所有事件进行巡查扫描的同时,可以随时响应事件的中断请求。
3.计算机控制系统有哪几种典型形式?各有什么主要特点?(1)操作指导控制系统(OIS)优点:结构简单、控制灵活和安全。
缺点:由人工控制,速度受到限制,不能控制对象。
(2)直接数字控制系统(DDC) (属于计算机闭环控制系统)优点:实时性好、可靠性高和适应性强。
(3)监督控制系统(SCC)优点:生产过程始终处于最有工况。
(4)集散控制系统优点:分散控制、集中操作、分级管理、分而自治和综合协调。
(5)现场总线控制系统优点:与DOS相比降低了成本,提高了可靠性。
(6)PLC+上位系统优点:通过预先编制控制程序实现顺序控制,用PLC代替电器逻辑,提高了控制是现代灵活性、功能及可靠性。
附加:计算机控制系统的发展趋势是什么?大规模及超大规模集成电路的发展,提高了计算机的可靠性和性能价格比,从而使计算机控制系统的应用也越来越广泛。
为更好地适应生产力的发展,扩大生产规模,以满足对计算机控制系统提出的越来越高的要求,目前计算机控制系统的发展趋势有以下几个方面。
计算机系统概论课后练习答案第四章
F.4Chapter4Solutions4.1Components of the V on Neumann Model:(a)Memory:Storage of information(data/program)(b)Processing Unit:Computation/Processing of Information(c)Input:Means of getting information into the computer.e.g.keyboard,mouse(d)Output:Means of getting information out of the computer.e.g.printer,monitor(e)Control Unit:Makes sure that all the other parts perform their tasks correctly and at thecorrect time.4.2The communication between memory and processing unit consists of two registers:MemoryAddress Register(MAR)and Memory Data Register(MDR).•To read,the address of the location is put in MAR and the memory is enabled for a read.The value is put in MDR by the memory.•To write,the address of the location is put MAR,the data is put in MDR and the WriteEnable signal is asserted.The value in MDR is written to the location specified.4.3The program counter does not maintain a count of any sort.The value stored in the programcounter is the address of the next instruction to be processed.Hence the name’Instruction Pointer’is more appropriate for it.4.4The size of the quantities normally processed by the ALU is referred to as the word length ofthe computer.The word length does not affect what a computer can compute.A computer with a smaller word length can do the same computation as one with a larger word length;but it will take more time.For example,to add two64bit numbers,word length=16takes4adds.word length=32takes2adds.word length=64takes1add.4.5(a)Location3contains0000000000000000Location6contains1111111011010011(b)i.Two’s Complement-Location0:0001111001000011=7747Location1:1111000000100101=-4059ii.ASCII-Location4:0000000001100101=101=’e’iii.Floating Point-Locations6and7:00000110110110011111111011010011Number represented is1.10110011111111011010011x2−11412iv.Unsigned-Location0:0001111001000011=7747Location1:1111000000100101=61477(c)Instruction-Location0:0001111001000011=Add R7R1R3(d)Memory Address-Location5:0000000000000110Refers to location6.Value storedin location6is11111110110100114.6The two components of and instruction are:Opcode:Identifies what the instruction does.Operands:Specifies the values on which the instruction operates.4.760opcodes=6bits32registers=5bitsSo number of bits required for IMM=32-6-5-5=16Since IMM is a2’s complement value,its range is-215...(215-1)=-32768..32767.4.8a)8-bitsb)7-bitsc)Maximum number of unused bits=3-bits4.9The second important operation performed during the FETCH phase is the loading of theaddress of the next instruction into the program counter.4.10Refer to the following table:Fetch StoreDecode Data Result0001,0110,11001100IR0001,0110,1100MDR01104.11The phases of the instruction cycle are:(a)Fetch:Get instruction from memory.Load address of next instruction in the ProgramCounter.(b)Decode:Find out what the instruction does.(c)Evaluate Address:Calculate address of the memory location that is needed to processthe instruction.(d)Fetch Operands:Get the source operands(either from memory or registerfile).(e)Execute:Perform the execution of the instruction.(f)Store Result:Store the result of the execution to the specified destination.F.4.CHAPTER4SOLUTIONS34.12Considering the LC3instruction formatsADDFetch:Get instruction from memory.Load next address into PC.Decode:It is here that it is determined that the instruction is an add instruction.Evaluate Address:No memory operation so NOT REQUIRED.Fetch Operands:Get operands from registerfile.Execute:Perform the add operation.Store Result:Store result in the registerfile.LDRFetch:Get instruction from memory.Load next address into PC.Decode:It is here that it is determined that the instruction is a Load Base+offset instruction.Evaluate Address:Calculate the memory address by adding the Base register with the sign extended offset.Fetch Operands:Get value from the memory.Execute:No operation needed so NOT RE-QUIRED.Store Result:Store the value loaded into the registerfile.JMPFetch:Get instruction from memory.Load next address into PC.Decode:It is here that it is determined that the instruction is a Jump instruction.Evaluate Address:No memory operation so NOT REQUIRED.Fetch Operands:Get the base register from registerfile.Execute:Store the value in PC.Store Result:NOT REQUIRED.**Since we are considering a non pipelined implementation,the instruction phases where no operation is performed may not be present in its execution cycle.4.13F D EA FO E SRx86:ADD[eax]edx100111001100=303 LC3:ADD R6,R2,R61001-111=104 4.14JMP:1100000011000000Fetch:Get instruction from memory.Load next address into PC.Decode:It is here that it is determined that the instruction is JMP.Evaluate Address:No memory operation,so NOT required.Fetch Operands:Get the base register from the registerfile.Execute:Load PC with the base register value,x369C.4.15Once the RUN latch is cleared,the clock stops,so no instructions can be processed.Thus,noinstruction can be used to set the RUN latch.In order to re-initiate the instruction cycle,an external input must be applied.This can be in the form of an interrupt signal or a front panel switch,for example.4.16(a)1/(2∗10−9)=5∗108machine cycles per second.(b)5∗108/8=6.25∗107instructions per second.(c)It should be noted that once thefirst instruction reaches the last phase of the instruction,an instruction will be completed every cycle.So,except for this initial delay(known aslatency),one instruction will be completed each machine cycle(assuming that there are4no breaks in the sequentialflow).If we ignore the latency,the number of instructionsthat will be executed each second is same as the number of machine cycles in a second=5*108.。
于海生---微型计算机控制技术课后习题答案
第一章计算机控制系统概述习题及参考答案1.计算机控制系统的控制过程是怎样的计算机控制系统的控制过程可归纳为以下三个步骤:(1)实时数据采集:对被控量的瞬时值进行检测,并输入给计算机。
(2)实时决策:对采集到的表征被控参数的状态量进行分析,并按已定的控制规律,决定下一步的控制过程。
!(3)实时控制:根据决策,适时地对执行机构发出控制信号,完成控制任务。
2.实时、在线方式和离线方式的含义是什么(1)实时:所谓“实时”,是指信号的输入、计算和输出都是在一定时间范围内完成的,即计算机对输入信息以足够快的速度进行处理,并在一定的时间内作出反应并进行控制,超出了这个时间就会失去控制时机,控制也就失去了意义。
(2)“在线”方式:在计算机控制系统中,如果生产过程设备直接与计算机连接,生产过程直接受计算机的控制,就叫做“联机”方式或“在线”方式。
(3)“离线”方式:若生产过程设备不直接与计算机相连接,其工作不直接受计算机的控制,而是通过中间记录介质,靠人进行联系并作相应操作的方式,则叫做“脱机”方式或“离线”方式。
3.微型计算机控制系统的硬件由哪几部分组成各部分的作用是什么—由四部分组成。
图微机控制系统组成框图(1)主机:这是微型计算机控制系统的核心,通过接口它可以向系统的各个部分发出各种命令,同时对被控对象的被控参数进行实时检测及处理。
主机的主要功能是控制整个生产过程,按控制规律进行各种控制运算(如调节规律运算、最优化计算等)和操作,根据运算结果作出控制决策;对生产过程进行监督,使之处于最优工作状态;对事故进行预测和报警;编制生产技术报告,打印制表等等。
(2)输入输出通道:这是微机和生产对象之间进行信息交换的桥梁和纽带。
过程输入通道把生产对象的被控参数转换成微机可以接收的数字代码。
过程输出通道把微机输出的控制命令和数据,转换成可以对生产对象进行控制的信号。
过程输入输出通道包括模拟量输入输出通道和数字量输入输出通道。
计算机控制系统_课后答案全解
第1章习题B 习题B1-1 举例说明2-3个你熟悉的计算机控制系统,并说明与常规连续模拟控制系统相比的优点。
B1-2 利用计算机及接口技术的知识,提出一个用同一台计算机控制多个被控参量的分时巡回控制方案。
B1-3 题图B1-3是一典型模拟式火炮位置控制系统的原理结构图。
由雷达测出目标的高低角、方位角和斜距,信号经滤波后,由模拟式计算机计算出伺服系统高低角和方位角的控制指令,分别加到炮身的高低角和方位角伺服系统,使炮身跟踪指令信号。
为了改善系统的动态和稳态特性,高低角和方位角伺服系统各自采用了有源串联校正网络和测速反馈校正,同时利用逻辑电路实现系统工作状态的控制(如偏差过大时可断开主反馈,实现最大速度控制,当偏差小于一定值后实现精确位置控制)。
试将其改造为计算机控制系统,画出系统原理结构图。
题图B1-3典型模拟式火炮位置控制系统的原理结构图B1-4水位高度控制系统如题图B.1-4所示。
水箱水位高度指令由W1 电位计指令电压u r确定,水位实际高度h由浮子测量,并转换为电位计W2 的输出电压u h。
用水量Q1 为系统干扰。
当指令高度给定后,系统保持给定水位,如打开放水管路后,水位下降,系统将控制电机,打开进水阀门,向水箱供水,最终保持水箱水位为指令水位。
试把该系统改造为计算机控制系统。
画出原理示意图及系统结构图。
题图B1-4 水箱水位控制系统原理示意图B1-5 题图B1-5为一机械手控制系统示意图。
将其控制器改造为计算机实现,试画出系统示意图及控制系统结构图。
题图B1-5机械手控制系统示意图B1-6题图B1-6为仓库大门自动控制系统示意图。
试将其改造为计算机控制系统,画出系统示意图。
题图B1-6 仓库大门自动控制系统示意图B1-7车床进给伺服系统示意图如题图B1-7所示。
电动机通过齿轮减速机构带动丝杠转动,进而使工作台面实现直线运动。
该系统为了改善系统性能,利用测速电机实现测速反馈。
试将该系统改造为计算机控制系统,画出系统示意图。
计算机控制技术课后习题答案
第一章计算机控制系统概述习题及参考答案1.计算机控制系统的控制过程是怎样的计算机控制系统的控制过程可归纳为以下三个步骤:1实时数据采集:对被控量的瞬时值进行检测,并输入给计算机;2实时决策:对采集到的表征被控参数的状态量进行分析,并按已定的控制规律,决定下一步的控制过程;3实时控制:根据决策,适时地对执行机构发出控制信号,完成控制任务;2.实时、在线方式和离线方式的含义是什么1实时:所谓“实时”,是指信号的输入、计算和输出都是在一定时间范围内完成的,即计算机对输入信息以足够快的速度进行处理,并在一定的时间内作出反应并进行控制,超出了这个时间就会失去控制时机,控制也就失去了意义;2“在线”方式:在计算机控制系统中,如果生产过程设备直接与计算机连接,生产过程直接受计算机的控制,就叫做“联机”方式或“在线”方式;3“离线”方式:若生产过程设备不直接与计算机相连接,其工作不直接受计算机的控制,而是通过中间记录介质,靠人进行联系并作相应操作的方式,则叫做“脱机”方式或“离线”方式;3.微型计算机控制系统的硬件由哪几部分组成各部分的作用是什么由四部分组成;图微机控制系统组成框图1主机:这是微型计算机控制系统的核心,通过接口它可以向系统的各个部分发出各种命令,同时对被控对象的被控参数进行实时检测及处理;主机的主要功能是控制整个生产过程,按控制规律进行各种控制运算如调节规律运算、最优化计算等和操作,根据运算结果作出控制决策;对生产过程进行监督,使之处于最优工作状态;对事故进行预测和报警;编制生产技术报告,打印制表等等;2输入输出通道:这是微机和生产对象之间进行信息交换的桥梁和纽带;过程输入通道把生产对象的被控参数转换成微机可以接收的数字代码;过程输出通道把微机输出的控制命令和数据,转换成可以对生产对象进行控制的信号;过程输入输出通道包括模拟量输入输出通道和数字量输入输出通道;3外部设备:这是实现微机和外界进行信息交换的设备,简称外设,包括人机联系设备操作台、输入输出设备磁盘驱动器、键盘、打印机、显示终端等和外存贮器磁盘;其中操作台应具备显示功能,即根据操作人员的要求,能立即显示所要求的内容;还应有按钮,完成系统的启、停等功能;操作台还要保证即使操作错误也不会造成恶劣后果,即应有保护功能;4检测与执行机构a.测量变送单元:在微机控制系统中,为了收集和测量各种参数,采用了各种检测元件及变送器,其主要功能是将被检测参数的非电量转换成电量,例如热电偶把温度转换成mV信号;压力变送器可以把压力转换变为电信号,这些信号经变送器转换成统一的计算机标准电平信号0~5V或4~20mA后,再送入微机;b.执行机构:要控制生产过程,必须有执行机构,它是微机控制系统中的重要部件,其功能是根据微机输出的控制信号,改变输出的角位移或直线位移,并通过调节机构改变被调介质的流量或能量,使生产过程符合预定的要求;例如,在温度控制系统中,微机根据温度的误差计算出相应的控制量,输出给执行机构调节阀来控制进入加热炉的煤气或油量以实现预期的温度值;常用的执行机构有电动、液动和气动等控制形式,也有的采用马达、步进电机及可控硅元件等进行控制;4.微型计算机控制系统软件有什么作用说出各部分软件的作用;软件是指能够完成各种功能的计算机程序的总和;整个计算机系统的动作,都是在软件的指挥下协调进行的,因此说软件是微机系统的中枢神经;就功能来分,软件可分为系统软件、应用软件及数据库;1系统软件:它是由计算机设计者提供的专门用来使用和管理计算机的程序;对用户来说,系统软件只是作为开发应用软件的工具,是不需要自己设计的;系统软件包括:a.操作系统:即为管理程序、磁盘操作系统程序、监控程序等;b.诊断系统:指的是调节程序及故障诊断程序;c.开发系统:包括各种程序设计语言、语言处理程序编译程序、服务程序装配程序和编辑程序、模拟主系统系统模拟、仿真、移植软件、数据管理系统等;d.信息处理:指文字翻译、企业管理等;2应用软件:它是面向用户本身的程序,即指由用户根据要解决的实际问题而编写的各种程序;应用软件包括:a.过程监视程序:指巡回检测程序、数据处理程序、上下限检查及报警程序、操作面板服务程序、数字滤波及标度变换程序、判断程序、过程分析程序等;b.过程控制计算程序:指的是控制算法程序、事故处理程序和信息管理程序,其中信息管理程序包括信息生成调度、文件管理及输出、打印、显示程序等;c.公共服务程序:包括基本运算程序、函数运算程序、数码转换程序、格式编码程序;3数据库:数据库及数据库管理系统主要用于资料管理、存档和检索,相应软件设计指如何建立数据库以及如何查询、显示、调用和修改数据等;5.微型计算机控制系统的特点是什么微机控制系统与常规的自动控制系统相比,具有如下特点:a.控制规律灵活多样,改动方便b.控制精度高,抑制扰动能力强,能实现最优控制c.能够实现数据统计和工况显示,控制效率高d.控制与管理一体化,进一步提高自动化程度6.操作指导、DDC和SCC系统工作原理如何它们之间有何区别和联系1操作指导控制系统:在操作指导控制系统中,计算机的输出不直接作用于生产对象,属于开环控制结构;计算机根据数学模型、控制算法对检测到的生产过程参数进行处理,计算出各控制量应有的较合适或最优的数值,供操作员参考,这时计算机就起到了操作指导的作用;其原理框图如图所示;图操作指导控制系统原理框图2直接数字控制系统DDC系统:DDCDirect Digital Control系统就是通过检测元件对一个或多个被控参数进行巡回检测,经输入通道送给微机,微机将检测结果与设定值进行比较,再进行控制运算,然后通过输出通道控制执行机构,使系统的被控参数达到预定的要求;DDC系统是闭环系统,是微机在工业生产过程中最普遍的一种应用形式;其原理框图如图所示;图 DDC系统原理框图3计算机监督控制系统SCC系统:SCCSupervisory Computer Control系统比DDC 系统更接近生产变化的实际情况,因为在DDC系统中计算机只是代替模拟调节器进行控制,系统不能运行在最佳状态,而SCC系统不仅可以进行给定值控制,并且还可以进行顺序控制、最优控制以及自适应控制等;SCC系统的原理框图如图所示;图 SCC系统原理框图SCC是操作指导控制系统和DDC系统的综合与发展;7.计算机控制系统的发展趋势是什么大规模及超大规模集成电路的发展,提高了计算机的可靠性和性能价格比,从而使计算机控制系统的应用也越来越广泛;为更好地适应生产力的发展,扩大生产规模,以满足对计算机控制系统提出的越来越高的要求,目前计算机控制系统的发展趋势有以下几个方面;a.普及应用可编程序控制器b.采用集散控制系统c.研究和发展智能控制系统本章作业简述几类常见的计算机控制系统的特点及其应用领域;第二章输入输出过程通道习题及参考答案1.什么是过程通道过程通道有哪些分类过程通道是在计算机和生产过程之间设置的信息传送和转换的连接通道;按信息传递的方向来分,过程通道可分为输入过程通道和输出过程通道;按所传递和交换的信息来分,过程通道又可分为数字量过程通道和模拟量过程通道;2.数字量过程通道由哪些部分组成各部分的作用是什么数字量过程通道包括数字量输入通道和数字量输出通道;数字量输入通道主要由输入缓冲器、输入调理电路、输入地址译码电路、并行接口电路和定时计数电路等组成;数字量输出通道主要由输出锁存器、输出驱动电路、输出口地址译码电路等组成;其中:输入调理电路将来自控制装置或生产过程的各种开关量,进行电平转换,将其通断状态转换成相应的高、低电平,同时还要考虑对信号进行滤波、保护、消除触点抖动,以及进行信号隔离等问题;3.简述两种硬件消抖电路的工作原理;采用积分电路的硬件消抖电路,首先利用积分电路将抖动的高频部分滤出,其次利用施密特触发器整形;采用RS触发器的硬件消抖电路,主要是利用RS触发器的保持功能实现消抖;4.简述光电耦合器的工作原理及在过程通道中的作用;光电耦合器由封装在一个管壳内的发光二极管和光敏三极管组成,如图所示;输入电流流过二极管时使其发光,照射到光敏三极管上使其导通,完成信号的光电耦合传送,它在过程通道中实现了输入和输出在电气上的完全隔离;图光电耦合器电路图5.模拟量输入通道由哪些部分组成各部分的作用是什么模拟量输入通道一般由I/V变换、多路转换器、采样保持器、A/D转换器、接口及控制逻辑电路组成;1I/V变换:提高了信号远距离传递过程中的抗干扰能力,减少了信号的衰减,为与标准化仪表和执行机构匹配提供了方便;2多路转换器:用来切换模拟电压信号的关键元件;3采样保持器:A/D转换器完成一次A/D转换总需要一定的时间;在进行A/D转换时间内,希望输入信号不再变化,以免造成转换误差;这样,就需要在A/D转换器之前加入采样保持器;4A/D转换器:模拟量输入通道的任务是将模拟量转换成数字量,能够完成这一任务的器件,称为之模/数转换器Analog/Digital Converter,简称A/D转换器或ADC;6.对理想多路开关的要求是什么理想的多路开关其开路电阻为无穷大,其接通时的导通电阻为零;此外,还希望切换速度快、噪音小、寿命长、工作可靠;7.采样保持器有什么作用试说明保持电容的大小对数据采集系统的影响;采样保持器的作用:A/D转换器完成一次A/D转换总需要一定的时间;在进行A/D 转换时间内,希望输入信号不再变化,以免造成转换误差;这样,就需要在A/D转换器之前加入采样保持器;保持电容对数据采集系统采样保持的精度有很大影响;保持电容值小,则采样状态时充电时间常数小,即保持电容充电快,输出对输入信号的跟随特性好,但在保持状态时放电时间常数也小,即保持电容放电快,故保持性能差;反之,保持电容值大,保持性能好,但跟随特性差;8.在数据采样系统中,是不是所有的输入通道都需要加采样保持器为什么不是,对于输入信号变化很慢,如温度信号;或者A/D转换时间较快,使得在A/D转换期间输入信号变化很小,在允许的A/D转换精度内,就不必再选用采样保持器;D转换器的结束信号有什么作用根据该信号在I/O控制中的连接方式,A/D转换有几种控制方式它们在接口电路和程序设计上有什么特点A/D转换器的结束信号的作用是用以判断本次AD转换是否完成;常见的A/D转换有以下几种控制方式,各自特点如下延时等待法:EOC可不和I/O口连接,程序设计时,延时大于ADC转换时间后,取数据;保持等待法:EOC与READY相连,EOC无效时,自动插入等待状态;直至EOC有效时,取数据;查询法: EOC可以和任意I/O口连接,程序设计时,反复判断EOC是否有效,直至EOC 有效时,取数据;中断响应法: EOC与外部中断相连,AD转换结束后,发中断申请,在中断服务程序中取数据;10.设被测温度变化范围为0o C~1200o C,如果要求误差不超过,应选用分辨为多少位的A/D 转换器 选择依据:124.0120012log ≈⎪⎭⎫ ⎝⎛+≥n 11.设计出8路模拟量采集系统;请画出接口电路原理图,并编写相应的8路模拟量数据采集程序;本例给出用8031、DAC0809设计的数据采集系统实例;把采样转换所得的数字量按序存于片内RAM 的30H~37H 单元中;采样完一遍后停止采集;其数据采集的初始化程序和中断服务程序如下:初始化程序:MOV R0,30H ;设立数据存储区指针MOV R2,08H ;设置8路采样计数值SETB IT0 ;设置外部中断0为边沿触发方式SETB EA ;CPU 开放中断SETB EX0 ;允许外部中断0中断MOV DPTR,FEF8H ;送入口地址并指向IN0LOOP : MOVX DPTR,A ;启动A/D 转换,A 的值无意义HERE : SJMP HERE ;等待中断中断服务程序:MOVX A,DPTR ;读取转换后的数字量MOV R0,A ;存入片内RAM 单元INC DPTR ;指向下一模拟通道INC R0 ;指向下一个数据存储单元DJNZ R2,INT0 ;8路未转换完,则继续CLR EA ;已转换完,则关中断CLR EX0 ;禁止外部中断0中断RETI ;中断返回INT0: MOVX DPTR,A ;再次启动A/D转换RETI ;中断返回12.模拟量输出通道由哪几部分组成各部分的作用是什么模拟量输出通道一般由接口电路、D/A转换器、功率放大和V/I变换等信号调理电路组成;1D/A转换器:模拟量输出通道的核心是数/模转换器Digital/Analog Converter,简称D/A转换器或DAC;它是指将数字量转换成模拟量的元件或装置;2V/I变换:一般情况下,D/A转换电路的输出是电压信号;在计算机控制系统中,当计算机远离现场,为了便于信号的远距离传输,减少由于传输带来的干扰和衰减,需要采用电流方式输出模拟信号;许多标准化的工业仪表或执行机构,一般是采用0~10mA或4~20mA的电流信号驱动的;因此,需要将模拟电压信号通过电压/电流V/I变换技术,转化为电流信号;13.采用DAC0832和PC总线工业控制机接口;请画出接口电路原理图,并编写产生三角波、梯形波和锯齿波的程序;设计一八路数据采集及其回放系统;要求八路数据巡回检测,存储10组数据,输数据为电压信号0-5V,检测精度<1%;CPU、AD、DA可任选;Uo第五章微机数控系统习题及参考答案1.什么是数控系统数控系统包括哪些数控系统是采用数字电子技术和计算机技术,对生产机械进行自动控制的系统,它包括顺序控制和数字程序控制两部分;2.什么是顺序控制系统它由哪几部分组成微机顺序控制方式是指以预先规定好的时间或条件为依据,按预先规定好的动作次序顺序地进行工作;一般地,把按时序或事序规定工作的自动控制称为顺序控制;它包括系统控制器、输入电路、输入接口、输出电路、输出接口、检测机构、显示与报警电路;3.微机数控系统由哪些部分组成各部分的作用是什么由五部分组成;1输入装置:一般指微机的输入设备,如键盘;其作用是输入数控系统对生产机械进行自动控制时所必需的各种外部控制信息和加工数据信息;2微机:微机是MNC系统运算和控制的核心;在系统软件指挥下,微机根据输入信息,完成数控插补器和控制器运算,并输出相应的控制和进给信号;若为闭环数控系统,则由位置检测装置输出的反馈信息也送入微机进行处理;3输出装置:一般包括输出缓冲电路、隔离电路、输出信号功率放大器、各种显示设备等;在微机控制下,输出装置一方面显示加工过程中的各有关信息,另一方面向被控生产机械输出各种有关的开关量控制信号冷却、启、停等,还向伺服机构发出进给脉冲信号等;4伺服机构:一般包括各种伺服元件和功率驱动元件;其功能是将输出装置发出的进给脉冲转换成生产机械相应部件的机械位移线位移、角位移运动;5加工机械:即数控系统的控制对象,各种机床、织机等;目前已有专门为数控装置配套设计的各种机械,如各种数控机床,它们的机械结构与普通机床有较大的区别;4.什么是逐点比较插补法直线插补计算过程和圆弧插补计算过程各有哪几个步骤逐点比较法插补运算,就是在某个坐标方向上每走一步即输出一个进给脉冲,就作一次计算,将实际进给位置的坐标与给定的轨迹进行比较,判断其偏差情况,根据偏差,再决定下一步的走向沿X轴进给,还是沿Y轴进给;逐点比较法插补的实质是以阶梯折线来逼近给定直线或圆弧曲线,最大逼近误差不超过数控系统的一个脉冲当量每走一步的距离,即步长;直线插补计算过程的步骤如下:1偏差判别:即判别上一次进给后的偏差值Fm是最大于等于零,还是小于零;2坐标进给:即根据偏差判断的结果决定进给方向,并在该方向上进给一步;3偏差计算:即计算进给后的新偏差值Fm+1,作为下一步偏差判别的依据;4终点判别:即若已到达终点,则停止插补;若未到达终点,则重复上述步骤;圆弧插补计算过程的步骤如下:1偏差判别2坐标进给3偏差计算4坐标计算5终点判别5.若加工第二象限直线OA,起点O0,0,终点A-4,6;要求:1按逐点比较法插补进行列表计算;2作出走步轨迹图,并标明进给方向和步数;解:由题意可知xe =4,ye=6,F=0,我们设置一个总的计数器Nxy,其初值应为Nxy=|6-0|+|-4-0|=10,则插补计算过程如表3—1所示;根据插补计算过程表所作出的直线插补走步轨迹图如下图所示;表3—11按逐点比较法插补进行列表计算;2作出走步轨迹图,并标明进给方向和步数;解:插补计算过程如表3—2所示;终点判别仍采用第二种方法,设一个总的计数器Nxy ,每走一步便减1操作,当Nxy=0时,加工到终点,插补运算结束;下图为插补过程中的走步轨迹;表3—2波形图;有三种工作方式: 1三相单三拍工作方式各相的通电顺序为A →B →C,各相通电的电压波形如图所示;图单三拍工作的电压波形图2三相双三拍工作方式双三拍工作方式各相的通电顺序为AB →BC →CA;各相通电的电压波形如图所示;图双三拍工作的电压波形图3三相六拍工作方式在反应式步进电机控制中,把单三拍和双三拍工作方式结合起来,就产生了六拍工作方式,其通电顺序为A →AB →B →BC →C →CA;各相通电的电压波形如图所示;图三相六拍工作的电压波形图8. 采用三相六拍方式控制X 轴走向步进电机; 主程序:MOV A,0FH;方向输入信号MOV P1,AXMM : MOV A,P1 JNB ,XM ;=0反转 LCALL STEP1;调正转子程序 SJMP XMMXM : LCALL STP2;调反转子程序SJMP XMM +X 走步子程序:STEP1: MOV DPTR,TAB ;指表头 CLR AMOVX A,A+DPTR ;取数非非非光电隔离功率放大步进电机AB C方向控制“1”正83CJNE A,05H,S11;是否最后单元 MOV DPTR,TAB;重置表头SJMP S12S11: INC DPTR ;地址加1S12: MOV R0,7FH;延时S13: DJNZ R0,S13;CLR A;MOVX A,A+DPTR;取数据MOV P1,ARET-X走步子程序:STEP2: MOV DPTR,TABCLR AMOVX A,A+DPTR;CJNZ A,01H,S21MOV DPTR,TABADD DPTR,0006HSJMP S12S21: CLR CDEC DPLSJMP S12TAB: DB 01H,03H,02H,06H,04H,05H本章作业若加工第二象限直线OA和圆弧AB,已知直线起点O0,0,终点A-4,6;圆弧起点A-4,6,终点A-6,10要求:1按逐点比较法插补进行列表计算;2作出走步轨迹图,并标明进给方向和步数;第四章 微型计算机控制系统的控制算法习题及参考答案1.数字控制器的模拟化设计步骤是什么 模拟化设计步骤:1设计假想的模拟控制器DS 2正确地选择采样周期T 3将DS 离散化为DZ4求出与DS 对应的差分方程 5根据差分方程编制相应程序; 2.某连续控制器设计为试用双线形变换法、前向差分法、后向差分法分别求取数字控制器DZ; 双线形变换法:把112+-•=z z T s 代入,则 前向差分法:把Tz-z 1=代入,则 后向差分法:把Tzz s 1-=代入,则3.在PID 调节器中系数p k 、i k 、d k 各有什么作用它们对调节品质有什么影响 系数p k 为比例系数,提高系数p k 可以减小偏差,但永远不会使偏差减小到零,而且无止境地提高系数p k 最终将导致系统不稳定;比例调节可以保证系统的快速性; 系数i k 为积分常数,i k 越大积分作用越弱,积分调节器的突出优点是,只要被调量存在偏差,其输出的调节作用便随时间不断加强,直到偏差为零;在被调量的偏差消除后,由于积分规律的特点,输出将停留在新的位置而不回复原位,因而能保持静差为零;但单纯的积分也有弱点,其动作过于迟缓,因而在改善静态品质的同时,往往使调节的动态品质变坏,过渡过程时间加长;积分调节可以消除静差,提高控制精度;系数d k 为微分常数,d k 越大微分作用越强;微分调节主要用来加快系统的相应速度,减小超调,克服振荡,消除系统惯性的影响;4.什么是数字PID 位置型控制算法和增量型控制算法试比较它们的优缺点;为了实现微机控制生产过程变量,必须将模拟PID 算式离散化,变为数字PID 算式,为此,在采样周期T 远小于信号变化周期时,作如下近似T 足够小时,如下逼近相当准确,被控过程与连续系统十分接近: 于是有:uk 是全量值输出,每次的输出值都与执行机构的位置如控制阀门的开度一一对应,所以称之为位置型PID 算法;在这种位置型控制算法中,由于算式中存在累加项,因此输出的控制量uk 不仅与本次偏差有关,还与过去历次采样偏差有关,使得uk 产生大幅度变化,这样会引起系统冲击,甚至造成事故;所以实际中当执行机构需要的不是控制量的绝对值,而是其增量时,可以采用增量型PID 算法;当控制系统中的执行器为步进电机、电动调节阀、多圈电位器等具有保持历史位置的功能的这类装置时,一般均采用增量型PID 控制算法;与位置算法相比,增量型PID 算法有如下优点:1位置型算式每次输出与整个过去状态有关,计算式中要用到过去偏差的累加值,容易产生较大的累积计算误差;而在增量型算式中由于消去了积分项,从而可消除调节器的积分饱和,在精度不足时,计算误差对控制量的影响较小,容易取得较好的控制效果;2为实现手动——自动无扰切换,在切换瞬时,计算机的输出值应设置为原始阀门开度u 0,若采用增量型算法,其输出对应于阀门位置的变化部分,即算式中不出现u 0项,所以易于实现从手动到自动的无扰动切换;3采用增量型算法时所用的执行器本身都具有寄存作用,所以即使计算机发生故障,执行器仍能保持在原位,不会对生产造成恶劣影响; 5.已知模拟调节器的传递函数为试写出相应数字控制器的位置型和增量型控制算式,设采样周期T=; 则()()()()s SE .s E s SU .s U 1700850+=+ 把T=代入得 位置型 增量型6.有哪几种改进的数字PID 控制器 有四种:1积分分离PID 控制算法 2不完全微分PID 控制算法 3带死区的PID 控制算法4消除积分不灵敏区的PID 控制10: 什么叫积分饱和 它是怎样引起的如何消除。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
T T2 T1 T T1 u ( k ) ( )u (k 1) e(k ) ( )e(k 1) T2 T2 T2
3.在PID调节器中系数 k p 、 k i 、kd 各有什么 作用?它们对调节品质有什么影响?
系数 k p 为比例系数,提高系数 k p 可以减小偏差,但永远不会使偏差 k 减小到零,而且无止境地提高系数p 最终将导致系统不稳定。比例调节 可以保证系统的快速性。
试用双线形变换法、前向差分法、后向差分 法分别求取数字控制器D(Z)。
双线形变换法:
2 z 1 把 s 代入,则 T z 1
2 z 1 1 T1 T z 1 D z D z | 2 z 1 s 2 z 1 T z 1 1 T2 T z 1 T 2T1 z T - 2T1 T 2T2 z T 2T2
w
(9 z )( f 21 z f 22 z )
因为:
1
1
2
1 ( z ) e ( z )
所以: 1 (1 0.1111 z 1 )( f 21z 1 f 22 z 2 ) (1 z 1 ) 2 (1 f11z 2 )
比较等式两边系数得: f11=0.11
6.有哪几种改进的数字PID控制器?
有四种: (1)积分分离PID控制算法 (2)不完全微分PID控制算法 (3)带死区的PID控制算法 (4)消除积分不灵敏区的PID控制
9.数字控制器直接(离散化)设计步骤是什么?
由广义对象的脉冲传递函数可得闭环脉冲传递函数, 可求得控制器的脉冲传递函数D(z)。 数字控制器的直接设计步骤如下: (1)根据控制系统的性质指标要求和其它约束条件, 确定所需的闭环脉冲传递函数Φ(z)。 (2)求广义对象的脉冲传递函数G(z)。 (3)求取数字控制器的脉冲传递函数D(z)。 (4)根据D(z)求取控制算法的递推计算公式。
1.数字控制器的模拟化设计步骤是什么? 模拟化设计步骤: (1)设计假想的模拟控制器D(S) (2)正确地选择采样周期T (3)将D(S)离散化为D(Z) (4)求出与D(S)对应的差分方程 (5)根据差分方程编制相应程序。
2.某连续控制器设计为
1 T1 s Ds 1 T2 s
edt T e( j )
t 0 j 0
k
de e( k ) e( k 1) dt T
于是有:
Td T k u (k ) K p {e(k ) e( j ) [e(k ) e(k 1)]} Ti j 0 T u(k)是全量值输出,每次的输出值都与执行机构的位置(如控 制阀门的开度)一一对应,所以称之为位置型PID算法。 在这种位置型控制算法中,由于算式中存在累加项,因此输 出的控制量u(k)不仅与本次偏差有关,还与过去历次采样偏 差有关,使得u(k)产生大幅度变化,这样会引起系统冲击, 甚至造成事故。所以实际中当执行机构需要的不是控制量的 绝对值,而是其增量时,可以采用增量型PID算法。当控制 系统中的执行器为步进电机、电动调节阀、多圈电位器等具 有保持历史位置的功能的这类装置时,一般均采用增量型 PID控制算法。
m=u+d=0, n=v-j+q=1
V-j 1
=1-z-1 =f21z-1
u
(2)单位阶跃输入信号 故:
R(z)=
f 21 1, ( z ) z 1
1 1 z 1
1 9 z 1
E ( z ) e ( z ) R( z ) 1
Y ( z ) R( z )( z ) z 1 z 2 z 3 ... z n
2 3 4 5 Y ( z ) R( z )( z ) 1.89z 3 z 4 z 5 z ...
E ( z ) e ( z ) R( z ) z 0.11zE(kT) 1 Nhomakorabea1
2
U ( z ) E ( z ) D( z ) 0.21z 1 0.1z 2 0.1z 3 0.1z 4 ...
1T 2T
t
(2)单位阶跃输入信号
R(z)=
1 1 z 1
1 e Ts 10 G ( z) Z[ ] s s (0.1s 1)
9z 1 z 1 ( 9 z 1 ) z ( z 1) 1 z 1
d=0, q=1, u=0, v=1, j=1,
增量型PID控制算法。
与位置算法相比,增量型PID算法有如下优点: (1)位置型算式每次输出与整个过去状态有关,计算式 中要用到过去偏差的累加值,容易产生较大的累积计算 误差;而在增量型算式中由于消去了积分项,从而可消 除调节器的积分饱和,在精度不足时,计算误差对控制 量的影响较小,容易取得较好的控制效果。 (2)为实现手动——自动无扰切换,在切换瞬时,计算 机的输出值应设置为原始阀门开度u0,若采用增量型算 法,其输出对应于阀门位置的变化部分,即算式中不出 现u0项,所以易于实现从手动到自动的无扰动切换。 (3)采用增量型算法时所用的执行器本身都具有寄存作 用,所以即使计算机发生故障,执行器仍能保持在原位, 不会对生产造成恶劣影响。
前向差分法:
把
z 1 1 T1 1 T1s T D z D s | z 1 s 1 T2 s 1 T z 1 T 2 T T1 z T T1 T2 z T T2
z-1 代入,则 z T
后向差分法:
把 s
z 1 Tz
k 系数 k i 为积分常数, i 越大积分作用越弱,积分调节器的突出优点 是,只要被调量存在偏差,其输出的调节作用便随时间不断加强,直到 偏差为零。在被调量的偏差消除后,由于积分规律的特点,输出将停留 在新的位置而不回复原位,因而能保持静差为零。但单纯的积分也有弱 点,其动作过于迟缓,因而在改善静态品质的同时,往往使调节的动态 品质变坏,过渡过程时间加长。积分调节可以消除静差,提高控制精度。
1 1 1 1 2 U ( z ) E ( z ) D( z ) z z .... 9 81 729
0.11 0.012z 1 0.00137z 2 ....
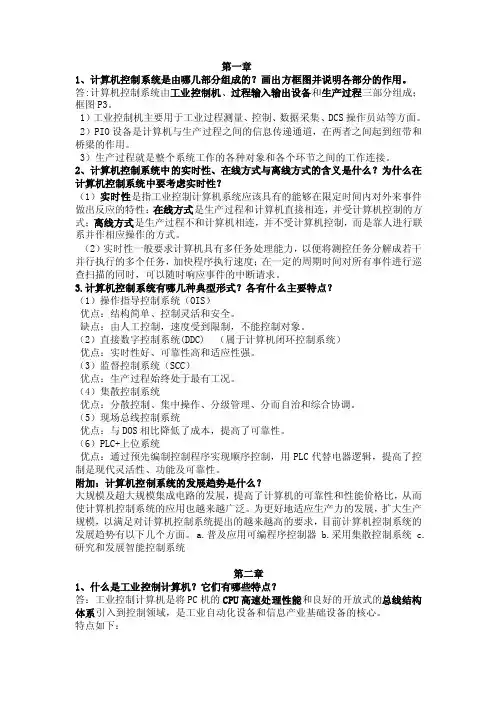
10.被控对象的传递函数为
1 Gc s 2 s
采样周期T=1s,采用零阶保持器,针对单位 速度输入函数,设计: (1)最少拍控制器; (2)画出采样瞬间数字控制器的输出和系统 的输出曲线。
(1) 对于单位速度输入信号
Tz 1 R( z ) (1 z 1 ) 2
1 e Ts 10 G ( z) Z[ ] s s (0.1s 1)
10Tz 1 1 1 (1 z )[ ] 1 2 1 10T 1 (1 z ) 1 z (1 e z )
写出系统的广义对象的脉冲传递函数
1 e-Ts 1 1 Ts Gc z Ζ 2 Z 1 e 3 s s s T 2 z -1 1 z 1 2 1 z
代入,则
z 1 1 T1 1 T1s Tz D z D s | z 1 s 1 T2 s 1 T z 1 Tz 2 Tz T1 z T T1 T2 z T T2
递推控制算法
U ( z ) T1 z T T1 T1 (T T1 ) z 1 D z E ( z ) T2 z T T2 T2 (T T2 ) z 1 T1 T T1 1 ( )z T2 T2 T T2 1 1 ( )z T2 U ( z ) ( T T2 1 T T T1 1 ) z U ( z) ( 1 ( ) z )E( z) T2 T2 T2
把T=0.2S代入得
1.425u k 0.425u k 1 4.5ek 3.5ek - 1
位置型
uk 3.1579 ek 2.4561ek 1 0.2982 uk 1
增量型
u k u k u k 1 3.1579ek 2.4561ek 1 0.7018u k 1
f21=1.89
f22=-0.99
故有:
e ( z ) (1 z 1 ) 2 (1 0.11z 1 )
( z ) (1 0.1111 z 1 )(1.89 z 1 0.99 z 2 )
0.21 0.11z 1 (1 z 1 )(1 0.11z 1 )
1
9 z 1 z 1 (9 z 1 ) 9 z 1 (1 0.1111 z 1 ) 1 z ( z 1) 1 z 1 z 1
d=0, q=2, v=1, j=1 , w=1 m=w+d=1, n=v-j+q=2
V-j
(1 z 1 ) 2 (1 f11 z 1 )
系数 为微分常数, 越大微分作用越强。微分调节主要用来加快系 kd kd 统的相应速度,减小超调,克服振荡,消除系统惯性的影响。
.4.什么是数字PID位置型控制算法和增量型控
制算法?试比较它们的优缺点。
为了实现微机控制生产过程变量,必须将模拟PID 算式离散化,变为数字PID算式,为此,在采样周 期T远小于信号变化周期时,作如下近似(T足够小 时,如下逼近相当准确,被控过程与连续系统十分 接近):
解:广义脉冲传递函数为
q = 1 (单位阶跃输入)
10.已知被控对象的传递函数为
10 Gc ( z ) s(0.1s 1)
采样周期T=1s,采用零阶保持器。要求 (1)针对单位速度输入信号设计最少拍无纹波系统的 D(z ),并计算输出响应y(k )、控制信号u(k ) 和误差e(k )序列,画出它们对时间变化的波形。 (2)针对单位阶跃输入信号设计最少拍有纹波系统的 D(z ),并计算输出响应y(k )、控制信号u(k ) 和误差e(k )序列,画出它们对时间变化的波形。